基于低空域小型無人機航拍技術的城市交通擁堵管控研究
2017-06-10 23:36:28邱文城李土生吳祥發羅永枝李煒旻
科技創新與應用 2017年16期
關鍵詞:無人機
邱文城+李土生+吳祥發+羅永枝+李煒旻

摘 要:針對目前交通視頻處理系統對交通流相關參數的提取仍處于初級發展階段,各種技術研究對交通流相關參數的提取存在局限性、檢測誤差大等問題,展開了基于低空域小型無人機航拍技術的城市交通擁堵管控研究,結合無人機拍攝視頻檢測技術及圖像處理技術,解決了利用無人機拍攝視頻檢測技術解決交通視頻處理系統對交通流的相關參數提取困難、檢測精度低等問題。
關鍵詞:無人機;視頻檢測技術;交通流參數
引言
常規的交通流檢測是通過路側的電子監控裝置和現場交警人工目測的手段獲取現場交通信息,這種傳統的方法存在著范圍小、誤判率高、效率低和成本高等缺陷。本項目結合小型無人機(Unmanned Aerial Vehicle)飛行靈活、能在空中自由懸停及自帶攝像機等特性,利用小型無人機在城市低空域航拍采集交通流參數,以獲取大范圍的實時交通路況信息,快速判讀交通擁堵級別。
1 圖像預處理
在進行交通流基本參數提取之前,要對采集的視頻進行預處理,主要包括設置圖像的感興趣區域(ROI)、混合高斯模型、圖像腐蝕與膨脹運算、車輛輪廓提取。
1.1 設置圖像的感興趣區域(ROI)
設置感興趣區域(ROI:Region Of Interest)是指從圖像中圈出一個圖像區域,圈出區域作為圖像分析所關注的目標,并對圈出區域進一步處理,減少圖像處理時間及外部環境的干擾,增加精度。
1.2 混合高斯模型
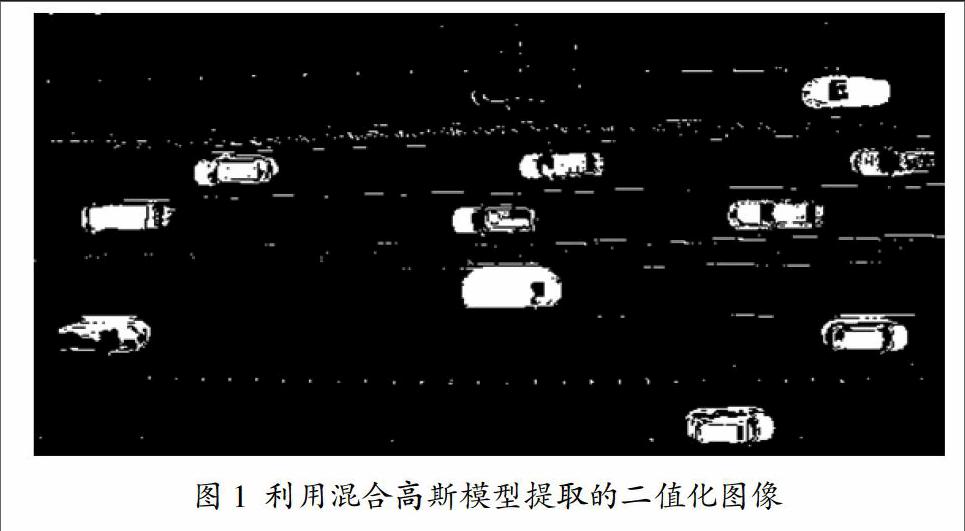
利用混合高斯模型,將拍攝的視頻序列的前幾幀圖像提取一張完全沒有車輛在道路中行駛的背景圖像,再將背景圖像與當前圖像對比,檢測出當前圖像中正在運動的車輛,并以二值化圖像顯示。如圖1所示,其中黑色為道路背景,白色為運動中的車輛。
圖1 利用混合高斯模型提取的二值化圖像
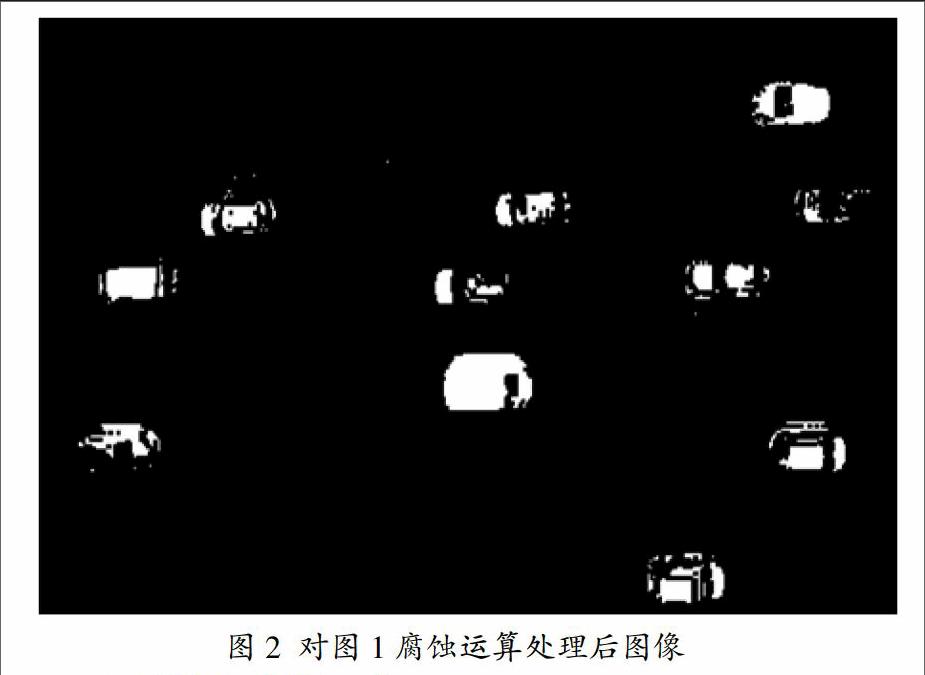
1.3 圖像腐蝕與膨脹運算
腐蝕運算在數學形態學運算中的作用是消除小于結構元素的點,膨脹運算在數學形態學運算中的作用是擴展物體的邊界點。通過混合高斯模型提取前景二值化圖像后,利用腐蝕運算處理消除圖像中無意義的像素點,再利用膨脹運算處理填補車輛中的空洞,使車輛輪廓更加完整,為下一步的車輛輪廓提取做準備。
1.4 車輛輪廓提取
車輛輪廓的提取主要是對前面一系列圖像處理后得到的二值化圖像進行檢測,以檢測二值化圖像中車輛輪廓的最外圍像素點為邊界點繪制矩形邊框。如圖4為圖3二值化圖像經車輛輪廓提取繪制矩形框后的圖像。
2 交通流基本參數檢測
2.1 基于單虛擬線圈的交通量檢測
交通量的獲取是在圖像中設置一條虛擬線圈,虛擬線圈設置的位置需與道路相垂直,如圖5A線所示。捕捉圖像中每個矩形邊框車頭方向任意一個頂點的坐標,當頂點坐標落到設置的虛擬線圈的范圍內時,檢測到車輛通過虛擬線圈所在的橫斷面,統計的交通量數值加1。
2.2 基于雙虛擬線圈的行車速度檢測
行車速度檢測則需要設置兩條虛擬線圈配合檢測。在圖像原有一條用于統計交通量的虛擬線圈的基礎上,加設一條相互平行的虛擬線圈,同樣以捕捉圖像中每個矩形邊框車頭方向任意一個頂點坐標的方法進行檢測。當車輛觸碰虛擬線圈1時,記錄該圖像所處幀數和車輛所處車道,當同一車道該車輛觸碰虛擬線圈2時,記錄該圖像所處幀數。獲取視頻的幀率(單位:1/秒),可得到車輛通過兩條虛擬線圈所需時間,再將圖像中兩條虛擬線圈之間的距離換算成實際距離(單位:米),則車輛行駛的速度(單位:公里/小時)可表示為:
V=■
2.3 車流密度獲取
車流密度的獲取,通過獲取每一幀圖像中所有矩形邊框的總面積,及道路面積,則矩形邊框總面積占道路面積的比率,再將得到的比率通過大量實驗,換算成車流密度K。
3 檢測結果驗證
3.1 車輛數驗證
在同車流密度不同高度、同高度不同車流密度兩種情況下進行車輛數檢測,將實際車輛數與程序檢測得的車輛數進行比較,如表1所示。
表1 車輛數驗證
從表1中可以看出,車輛數的檢測精確度較高,最大精確度為100%,最小精確度為92.9%。精確度的下降主要是隨著飛行高度的增大,視頻背景愈加復雜,影響車輛的識別,程序檢測時出現漏檢現象。漏檢對象的主要是顏色與灰色相近的車輛,隨著飛行高度的增大,不易將其檢測出來,但在低空飛行高度研究范圍內,車輛數檢測的精確度在可接受范圍之內。
3.2 行車速度驗證
選取具有不同行車速度的幾個視頻進行驗證,將程序檢測與人工計算的行車速度比較,如表2和表3所示。
表2 在15m飛行高度下佛山大道行車速度驗證
從表2和表3中可以看出,行車速度的檢測精確度較高,出現最大精確度高達為99%,最小精確度為96%,檢測的兩條道路平均速度精確度分別98%和97%,精確度較高。從表中也可以看出程序對行車速度在21km/h~57km/h之間的車輛都可以檢測出來其行車速度,且產生誤差較小,在研究范圍內屬于可接受范圍之內。
4 結束語
通過OpenCV和C++6.0組建的程序設置的虛擬線圈及捕捉矩形邊框頂點坐標的方法,計算出檢測畫面中的交通量和車輛的行車速度,檢測結果證明利用此方法計算的數據精確度高達90%以上,與傳統方法相比,利用無人機航拍獲取交通流參數的方法具有更高的時效性和準確性,是未來交通檢測技術的發展方向之一。
作者簡介:邱文城(1995,7-),男,漢族,廣東普寧市人,佛山科學技術學院在校學生,學歷:本科,研究方向:交通工程。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26