基于機器視覺的君遷子種子尖端特征識別方法研究
2017-05-30 10:03:43李躍華馮啟高候志松蘇建修
安徽農業科學 2017年10期
關鍵詞:機器視覺
李躍華 馮啟高 候志松 蘇建修
摘要針對君遷子種子的外形特點,基于Ramer輪廓擬合算法,結合Halcon算法工具包,提出了一種基于Ramer算法的君遷子種子尖端識別方法。結果表明, 該方法可以對種子輪廓進行擬合分割,確定種子的尖端位置。通過對5種不同品種君遷子的250粒種子進行識別,準確率達83.6%。
關鍵詞機器視覺;尖端識別;圖像處理
中圖分類號S126;TP391文獻標識碼
A文章編號0517-6611(2017)10-0210-03
Identification Method of Diospyros lotus Seeds Tip Characteristics Based on Machine Vision
LI Yuehua1, FENG Qigao1*, HOU Zhisong2 et al
(1.School of Mechanical and Electrical Engineering,Henan Institute of Science and Technology,Xinxiang,Henan 453003;2.College of Information Engineering, Henan Institute of Science and Technology,Xinxiang,Henan 453003)
AbstractBy analyzing the feature of the seeds, a method of identifying the seeds based on the Ramer algorithm was developed, which was based on the Ramer algorithm and the tool kit of Halcon.The experimental results showed that the method could fit and segment the seed profile, and finally determine the tip position of the seed.Through the identification of 250 seeds of 5 different species, the proposed method got accuracy of 83.6% for the tip position of the seeds.
Key wordsMachine vision;Tip identification;Image processing
種子尖端是許多農作物種子重要的外觀特征之一[1-2]。在計算機視覺技術識別種子品種的過程中,識別種子尖端、準確定位尖端位置在確定種子的主軸方向、測量種子長短軸尺寸,特別是在測量種子長軸1/4處和1/8處[3]尺寸具有重要作用。
對種子尖端的處理方式,已有相關研究。郝建平等[4]在圖像獲取階段,為了避免檢測籽粒的尖端位置,采用手工擺放玉米籽粒的方法。張俊雄等[5]根據玉米籽粒尖端附近灰度值差異,結合種子形心坐標,找到尖端點位置。權龍哲等[6]根據玉米外邊界上各點到形心的距離分布,利用小波變換求取尖端點的位置。楊蜀秦等[7]利用玉米和南瓜種子尖端角特征顯著的特點,將尖端檢測轉換為角點檢測問題。以上幾種檢測種子尖端位置的方法主要是針對玉米等經濟作物,其特點是種子尖角特征明顯,易于檢測。對于尖角特征不明顯的種子,如君遷子等尚未見相關報道。
君遷子是柿屬植物的一個品種,在柿樹砧木育種中應用廣泛,其種子尖端呈圓弧狀,尖角特征不明顯,在計算機識別過程中不易確定其尖端位置[8]。筆者基于種子的形態特征分析,結合德國MVtec公司開發的HALCON軟件,通過Ramer算法擬合種子輪廓,提出了基于Ramer算法的君遷子種子尖端識別方法,旨在解決尖角特征不明顯種子的尖端識別問題。
1材料與方法
1.1材料和儀器
選用5種不同類型的君遷子種子(1號種子、11號種子、38號種子、40號種子、44號種子)。每種類型精選具有代表性的種子各50粒,共250粒作為測試對象。
圖像采集設備為大恒圖像設備,相機為1394接口相機,型號為DH-HV3110FC。光源為環形光,型號為 LDR2-70SW2。背景采用背板燈,型號為LFL-100。采集圖像過程中,攝像頭的成像平面平行于種子平面,每粒種子拍攝圖片2張,正反各1張,共500張。
計算機配置為酷睿I5,3.3 GHz,內存為8 G。所有程序基于Halcon12.0運行。
1.2預處理過程
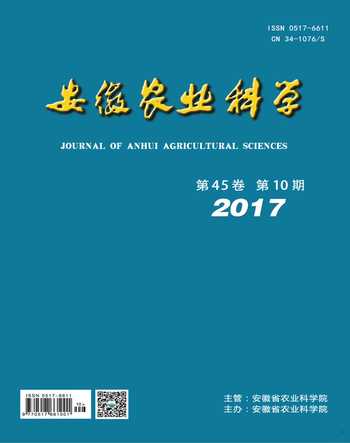
在尖端檢測之前,首先需要對采集的圖像進行預處理。采用白色背光燈作為背景,背景與種子區別明顯,經過閾值分割[9],將種子從圖像中識別出來,再經過去噪、填充等操作得到單個種子圖像,最后經過二值化處理,得到種子的二值圖。采集的原始圖像和預處理后得到的二值圖見圖1。
1.3試驗方法
君遷子種子呈扁平細長狀,顏色分布均勻,在計算機圖像識別中,灰度值差異不大,尖端附近尖角特征不顯著,使用角點檢測效果也不理想。由觀察可知,種子尖端附近的曲率特征較為明顯,基于形態特征考慮,將尖端檢測問題轉換為曲率半徑檢測問題。
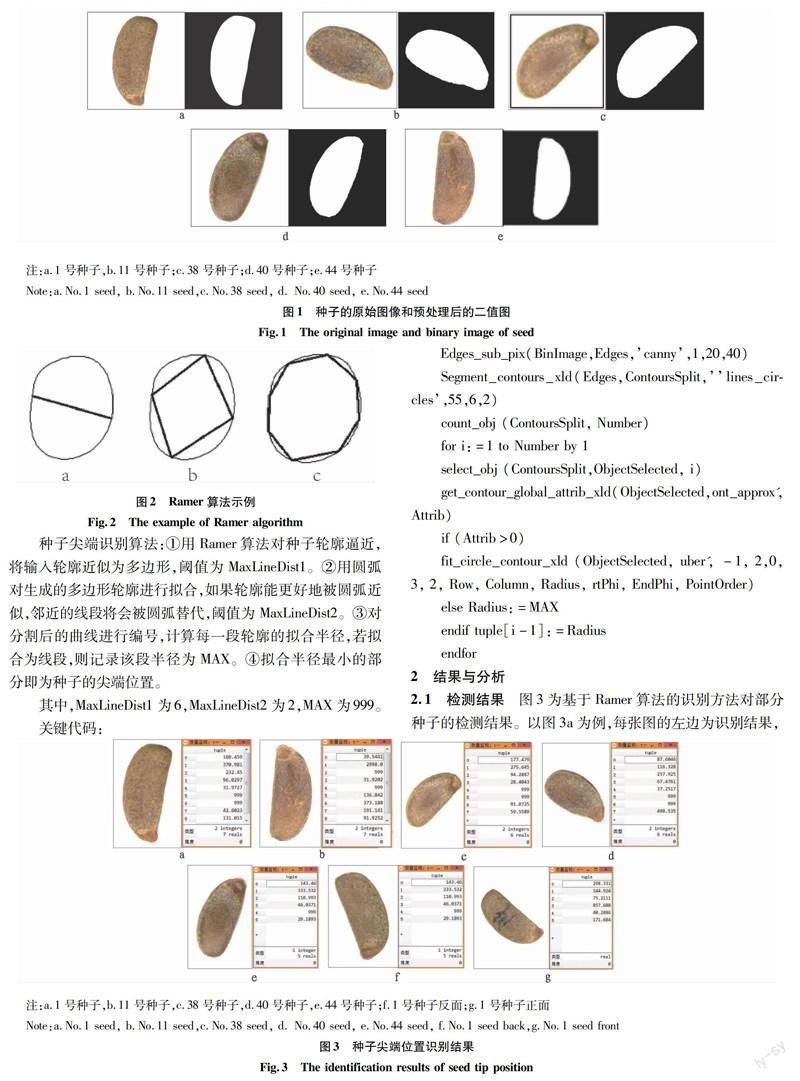
Ramer算法又稱道格拉斯-普克算法(Douglas-Pecucker)。此種算法的基本原理是不斷地對輪廓進行細分,直到所有線段到各個線段所對應的輪廓的最大距離均小于事先確定的距離閾值dmax為止[10]。如圖2所示,原始輪廓有n個點,先建立從初始點到索引為n/2點的線段,然后計算對應輪廓上所有輪廓點到線段的距離,若最大距離大于dmax,則建立最大距離的點到線段兩端點的線段,同時當前線段被新的2條線段代替,接著在新線段上做同樣處理,直到所有線段均能滿足最大距離約束條件為止。
基于Ramer算法的輪廓細分算法是先使用Ramer算法用一個多邊形逼近原輪廓,然后逐一檢查相鄰線段,看是否能用圓弧做更好的近似,若用圓弧擬合后的誤差比2條線段的最大擬合誤差小,則2段線段被標記為處理的候選對象。在檢查完所有線段后,具有最小擬合誤差的那對直線將會被合并。如此迭代處理,直到沒有能被合并的線段為止。
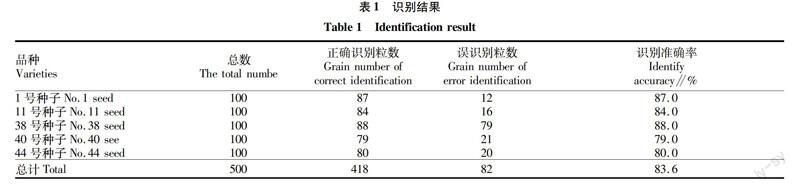
已標記出種子尖端位置,右邊為種子輪廓分割后的擬合結果。由圖3可知,種子輪廓被分割為9段,編號5、6擬合半徑為999,表示其被擬合為線段,其他為圓弧,數字代表擬合半徑。其中下標為4的圓弧半徑最小,將其標記出來,即為種子的尖端位置。
由檢測結果可知,提出的方法識別種子尖端位置僅與種子輪廓有關,對種子的品種、顏色和擺放位置和方向均不敏感(圖3)。 Ramer算法在擬合種子輪廓過程中,還原了種子的形狀特征。圖3f與圖3g為同一種子的正面和反面,種子的擺放位置和方向不同,擬合的輪廓基本相同,分割后的結果也相同,擬合的輪廓半徑相差不超過20像素點。
由表1可知,對于100幅圖片的識別準確率在79.0%~88.0%,其中40號種子的識別率最低,準確率為79.0%。38號種子的識別率最高,準確率為88.0%。綜合識別率為83.6%。
2.2誤識別分析
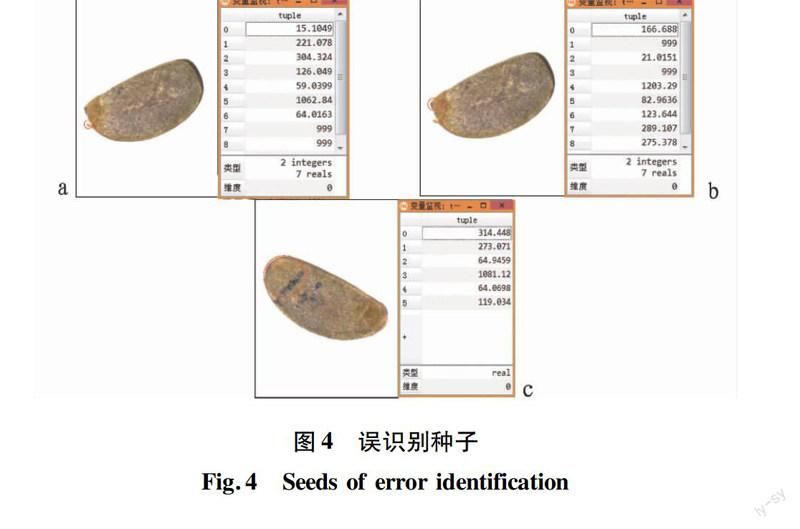
經過圖像對比分析,誤識別的種子主要分為兩類:第一類是種子邊緣有毛刺(圖4a),或者種子邊緣有輕微破損,外形不完整,破損處有明顯的角特征,易造成誤識別。此類誤識別經過膨脹腐蝕算子處理后,可得到正確的識別結果(圖4b)。
另一類是種子外形為兩頭尖,兩頭的擬合半徑相差不大(圖4c),種子兩端輪廓擬合半徑相差1像素點,因而造成誤識別。絕大多數誤識別均屬于此類。此類誤識別需要進一步結合種子的其他特征進行檢測。
3結論
基于君遷子種子尖端形態特征,提出了基于Ramer算法的君遷子種子尖端識別方法,可以快速定位種子的尖端位置。對5種不同品種的君遷子種子尖端進行識別,結果表明,該方法尖端識別率為83.6%。對兩端曲率特征相近的種子識別效果不理想,需要結合其他特征進一步識別分析。
參考文獻
[1]
LIU J,PAULSEN M R.Corn whiteness measurement and classification using machine vision[J].Transactions of the ASAE, 2000, 43(3):757-763.
[2] 刁智華,王會丹,魏偉.機器視覺在農業生產中的應用研究[J].農機化研究,2014(3):206-211.
[3] 鄭宇.基于機器視覺的稻谷種子特征提取與品種識別方法研究[D].武漢:華中農業大學,2009:25-32.
[4] 郝建平,楊錦忠,杜天慶,等.基于圖像處理的玉米品種的種子形態分析及其分類研究[J].中國農業科學,2008,41(4):994-1002.
[5] 張俊雄,荀一,李偉.基于形態特征的玉米種子表面裂紋檢測方法[J].光學精密工程,2007,15(6):951-956.
[6] 權龍哲,馬小愚.基于小波分析的玉米籽粒圖像正形研究[J].農機化研究,2006(2):154-156.
[7] 楊蜀秦,寧紀鋒,何東健.基于Harris算子的籽粒尖端識別方法[J].農業機械學報,2011,42(3):166-169.
[8] 梁玉琴,韓衛娟,張嘉嘉,等.河南省柿種質資源表型多樣性研究[J].中國農業大學學報,2015,20(1):74-85.
[9] 聶森,王丙龍,郝歡歡,等.基于機器視覺的果園導航中線提取算法研究[J].農機化研究,2016(12):86-89.
[10] 孫承勃,李軼鯤,張志華.基于道格拉斯-普克算法的圖像分割初探[J].測繪與空間地理信息,2012,35(5):33-35.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30