優(yōu)化的三電平逆變器無權(quán)重因子模型預(yù)測控制
2017-05-30 06:31:32賴華
微特電機(jī) 2017年12期
賴 華
(宜賓職業(yè)技術(shù)學(xué)院,宜賓 644003)
0 引 言
近年來,二極管鉗位型三電平逆變器在中壓驅(qū)動、可再生能源并網(wǎng)及電動汽車等領(lǐng)域得到廣泛關(guān)注和應(yīng)用[1],其控制方法主要可分為矢量控制和直接功率控制等,控制目標(biāo)主要包括輸出電流或輸出功率控制、共模電壓抑制、直流側(cè)中點電壓平衡控制及開關(guān)頻率控制等。常規(guī)的三電平逆變器控制方法較難實現(xiàn)多目標(biāo)優(yōu)化控制,而近年來得到廣泛關(guān)注的模型預(yù)測控制策略在三電平逆變器的控制之中得到深入研究[2-7]。
模型預(yù)測控制主要分為連續(xù)集模型預(yù)測控制和有限集模型預(yù)測控制。與連續(xù)集模型預(yù)測控制不同,有限集模型預(yù)測控制采用逆變器的有限個電壓矢量和其離散模型進(jìn)行優(yōu)化計算,并通過建立目標(biāo)函數(shù)來選擇最優(yōu)電壓矢量,并作用于逆變器。該方法由于具有不需要PWM調(diào)制單元,實現(xiàn)簡單并可同時處理多個控制目標(biāo)等優(yōu)點而在電力電子領(lǐng)域得到廣泛關(guān)注[8-14]。
與兩電平逆變器不同,三電平逆變器具有27個電壓矢量,且具有多個控制目標(biāo),如電流控制、直流側(cè)中點電壓平衡控制等,因此其模型預(yù)測控制策略較復(fù)雜。常規(guī)的三電平逆變器模型預(yù)測控制策略需要遍歷27個電壓矢量,因此其計算量較大[8-10]。同時,為了同時實現(xiàn)輸出電流控制、中點電壓平衡控制和低開關(guān)頻率控制等多個控制目標(biāo),常規(guī)的模型預(yù)測控制還需要合理的設(shè)計權(quán)重因子,而目前尚沒有成熟的權(quán)重因子設(shè)計理論[15-18]。
為了克服現(xiàn)有三電平逆變器模型預(yù)測控制存在計算復(fù)雜、需要設(shè)計權(quán)重因子的缺點,本文基于分層控制[19]的思想,設(shè)計了一種優(yōu)化的三電平逆變器無權(quán)重因子模型預(yù)測控制方法。該方法以交流電流和直流側(cè)中點電壓平衡為控制目標(biāo),優(yōu)先選擇滿足交流電流控制的電壓矢量,然后再對直流側(cè)中點電壓平衡進(jìn)行優(yōu)化,從而避免使用權(quán)重因子,并實現(xiàn)多目標(biāo)優(yōu)化。同時,為了避免每個周期都使用27個電壓矢量進(jìn)行優(yōu)化,提高逆變器運行的安全可靠性,本文還從3個方面詳細(xì)研究了三電平逆變器的電壓矢量優(yōu)化選擇方法。仿真和實驗結(jié)果驗證了本文所設(shè)計的控制策略的有效性。
1 三電平逆變器的數(shù)學(xué)模型
1.1 連續(xù)數(shù)學(xué)模型
圖1給出了二極管鉗位型三電平逆變器的電路拓?fù)洹T撃孀兤髅總€橋臂包含4個IGBT,其中性點通過二極管連接到直流側(cè)中性點。
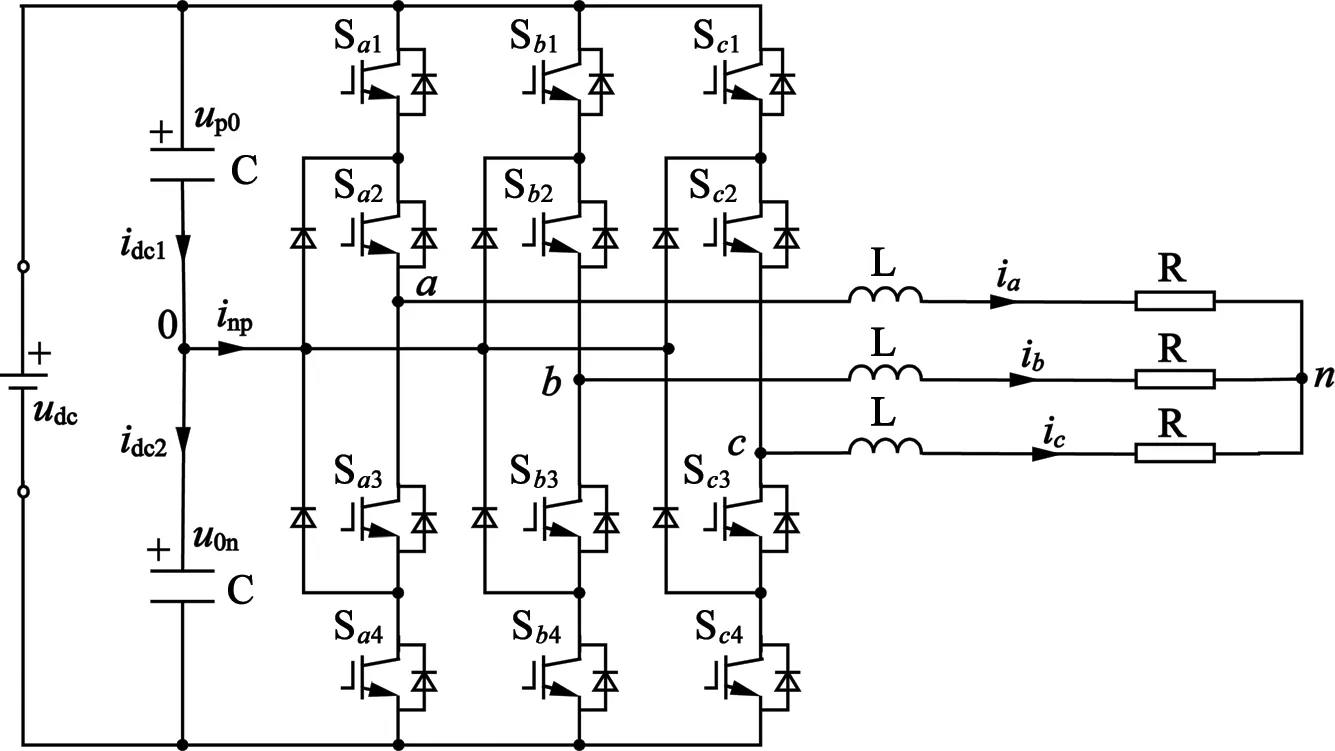
圖1 二極管鉗位型三電平逆變器的電路拓?fù)?/p>
設(shè)Si(i=a,b,c)為三電平逆變器的開關(guān)函數(shù),以a相為例,其定義滿足:
(1)
根據(jù)式(1)的定義,可得三電平逆變器的所有27個電壓矢量,其矢量分布如圖2所示。
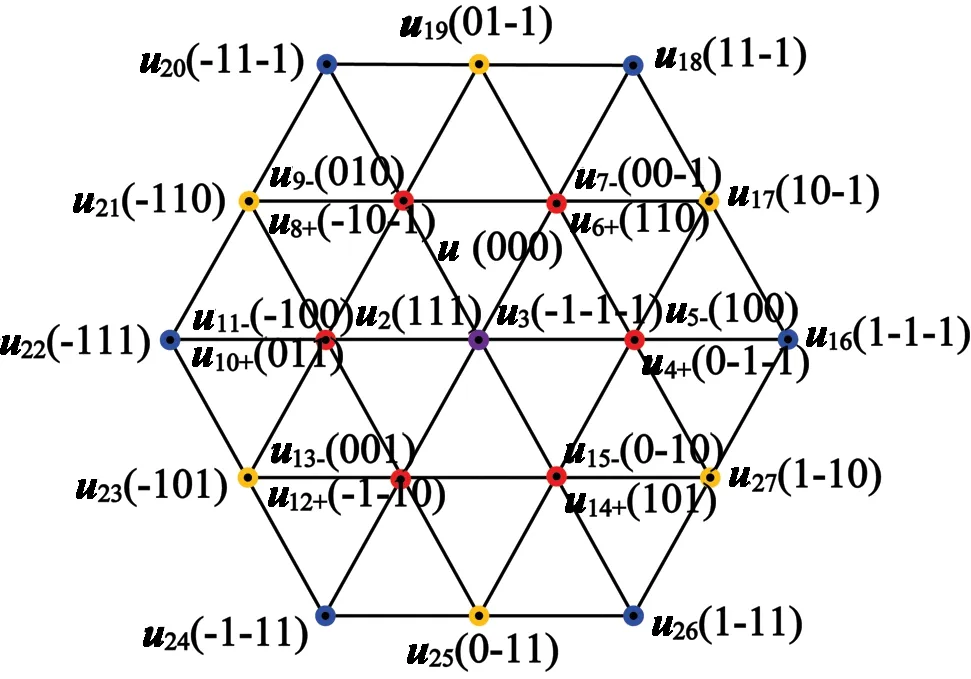
圖2 三電平逆變器的電壓矢量
與兩電平逆變器的8個電壓矢量相比,三電平逆變器具有更多的電壓矢量,因此其輸出電壓電流的諧波更小,但同時其控制目標(biāo)也較多。
由圖1和基爾霍夫電壓定律可得:
(2)
式中:i=[ia,ib,ic]T為三相相電流;v=[van,vbn,vcn]T為三相相電壓。
三電平逆變器輸出的電壓矢量和開關(guān)函數(shù)之間的關(guān)系可表示:
(3)
設(shè)u0=up0-u0n為三電平逆變器的直流側(cè)中點電壓[6],則其滿足:
(1-|Sc|)ifc]
(4)
1.2 離散數(shù)學(xué)模型
為了進(jìn)行預(yù)測控制,需要對上述三電平逆變器的連續(xù)數(shù)學(xué)模型進(jìn)行離散化,在一個控制周期Ts內(nèi),變量x的微分可近似表示:
(5)
根據(jù)式(5)可得電流的離散數(shù)學(xué)模型:
(6)
根據(jù)式(5)可得直流側(cè)中點電壓的離散數(shù)學(xué)模型:
(7)
在實際的預(yù)測過程中,控制器根據(jù)當(dāng)前時刻的電壓矢量和式(3)得出電壓矢量值,然后根據(jù)式(6)和式(7)分別進(jìn)行電流和直流側(cè)中點電壓的預(yù)測,并最終選擇出最優(yōu)矢量。
2 優(yōu)化的無權(quán)重因子模型預(yù)測控制方法
2.1 權(quán)重因子消除方法
為了同時實現(xiàn)三電平逆變器電流和直流側(cè)中點電壓平衡控制,常規(guī)的模型預(yù)測控制方法需要在目標(biāo)函數(shù)中設(shè)計權(quán)重因子,其典型的目標(biāo)函數(shù)可表示:
g=|i*-i|+λdc|up0-u0n|
(8)
式中:λdc為權(quán)重因子。
本文采用分層控制的思想分別對電流和直流側(cè)中點電壓平衡進(jìn)行控制[19]。
首先,本文定義電流控制目標(biāo)函數(shù):
g1=|i*-i|≤δi
(9)
式中:δi為電流控制環(huán)寬。
式(9)表明,可以將電流控制在環(huán)寬δi之內(nèi)的電壓矢量可以用于對直流側(cè)中點電壓進(jìn)行優(yōu)化控制。而直流側(cè)中點電壓平衡的控制目標(biāo):
g2=|up0-u0n|
(10)
根據(jù)式(10),對滿足電流控制要求的電壓矢量進(jìn)行直流側(cè)中點電壓平衡優(yōu)化,使g2最小的電壓矢量為最終的最優(yōu)矢量。
2.2 電壓矢量優(yōu)化選擇方法
常規(guī)的三電平模型預(yù)測控制方法常常采用27個電壓矢量進(jìn)行優(yōu)化運算,其計算量較大,且存在逆變器安全運行風(fēng)險較大的缺點。本文對此進(jìn)行了詳細(xì)分析。
首先,從只允許相鄰矢量切換的角度考慮,大矢量、中矢量、小矢量和零矢量所對應(yīng)的備選矢量集如下所述。
以k時刻作用的矢量為大矢量u16為例,則k+1時刻的備選矢量為u4,u5,u16,u17,u27;
以k時刻作用的矢量為中矢量u17為例,則k+1時刻的備選矢量為u4,u5,u6,u7,u16,u17,u18;
以k時刻作用的矢量為小矢量u4為例,則k+1時刻的備選矢量為u1,u2,u3,u4,u5,u6,u7,u14,u15,u16,u17,u27。
若k時刻為零矢量,以u1為例,則k+1時刻的備選矢量為u1,u2,u3,u4,u5,u6,u7,u8,u9,u10,u11,u12,u13,u14,u15。
其次,從減小共模電壓的角度考慮,結(jié)合式(4)可知,3個零矢量產(chǎn)生的共模電壓也不相同。其中,零矢量(111)和(-1-1-1)產(chǎn)生的共模電壓較大,而u1(000)則不產(chǎn)生共模電壓。因此,在選擇零矢量時,僅考慮u1(000)。
第三,從減小電壓變化率的角度考慮,對三電平逆變器而言,其相電壓和線電壓可表示如下:
(11)
(12)
由式(11)可知,為了保證相電壓變化量不超過Udc/2,則不允許1和-1之間進(jìn)行切換。
為了保證每個周期內(nèi)線電壓的變化為在Udc/2之內(nèi),根據(jù)式(12)作如下分析。
首先,通過分析可知,三電平逆變器任意兩種開關(guān)狀態(tài)的組合有如下6種,即:(0,-1),(0,1),(0,0),(-1,-1),(1,1),(1,-1)。這6種開關(guān)狀態(tài)組合的差的絕對值分別為:1,1,0,0,0,2。由此可見,為了限制每個周期內(nèi)線電壓的變化,需要禁止開關(guān)狀態(tài)組合{(1,0)—(1,-1)},{(-1,-1)—(1,-1)},{0,0—1,-1},{-1,-1—1,-1}之間切換。
上述電壓矢量選擇方案減小了du/dt,降低了EMI噪聲,提高了逆變器運行的安全性。
綜上,本文所設(shè)計的電壓備選矢量選擇方案可總結(jié)如下:
(1)只選擇上一周期作用的電壓矢量及其相鄰電壓矢量作為備選矢量;
(2)選擇零矢量時,只選擇(0,0,0);
(3)禁止開關(guān)狀態(tài)1和開關(guān)狀態(tài)-1之間直接進(jìn)行切換;
(4)不允許Sa,Sb,Sc中的任意兩相由{0,0—1,-1}—1-1切換。
為了清晰起見,圖3給出了本文設(shè)計的模型預(yù)測控制算法框圖。
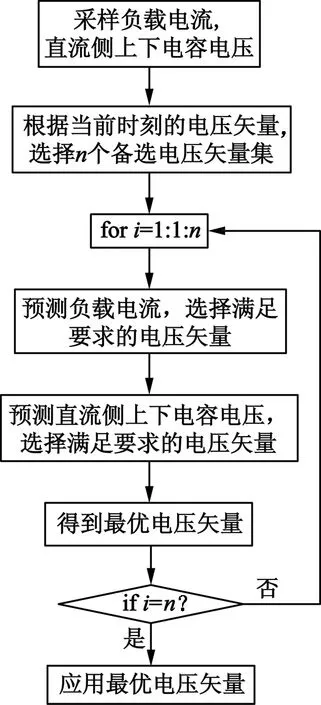
圖3 模型預(yù)測控制算法框圖
3 仿真研究
為了驗證算法的有效性,進(jìn)行了仿真驗證,仿真中所使用的參數(shù)如表1所示。

表1 仿真參數(shù)
首先,圖4給出了電流設(shè)為15A,電流環(huán)寬設(shè)定為4A時的穩(wěn)態(tài)仿真結(jié)果。由圖4(a)可見,電流被控制在設(shè)定的環(huán)寬之內(nèi),這驗證了本文所設(shè)計的預(yù)測電流控制策略的有效性。同時,由圖4(b)可見,直接側(cè)中點電壓也實現(xiàn)了平衡控制。中點電壓偏差在±1V之內(nèi),如圖4(c)所示。這表明,本文設(shè)計的無權(quán)重因子控制策略可以很好地實現(xiàn)電流和中點電壓平衡等多個目標(biāo)的控制,驗證了所設(shè)計的控制策略的有效性。
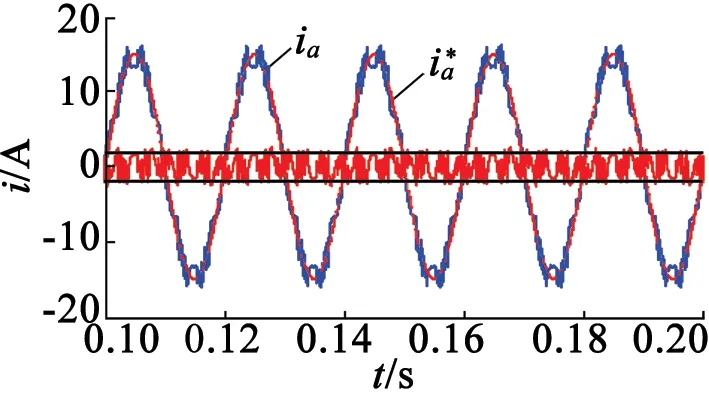
(a) 指令電流、實際電流、電流誤差
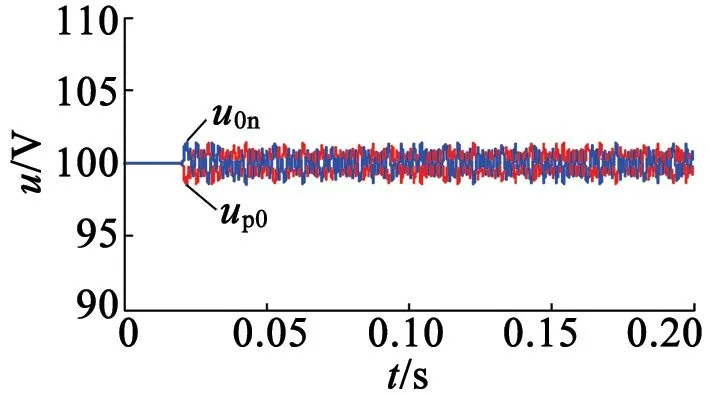
(b) 中點電壓
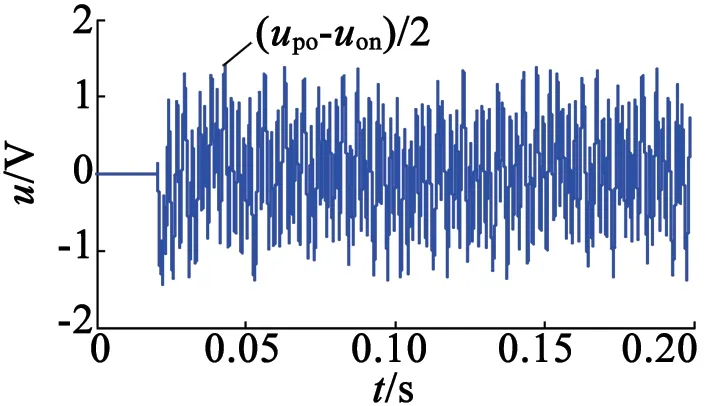
(c) 中點電壓偏移量
其次,圖5給出了直流側(cè)中點電壓存在偏差時的動態(tài)仿真結(jié)果,以進(jìn)一步驗證本文的控制策略的有效性。此時,電流依然設(shè)為15A,電流環(huán)寬依然設(shè)定為4A。仿真時,設(shè)定直流側(cè)初始電壓偏差為±50V。
圖 5(a)給出了a相電流的仿真結(jié)果。由于在0.02~0.03s之間,直流側(cè)中點電壓偏差較大,導(dǎo)致電流也出現(xiàn)了一定的畸變。但是,在本文的控制策略的作用下,直流側(cè)中點電壓偏差迅速減小,如圖5(b)和圖5(c)所示。0.05s之后,系統(tǒng)的電流和中點電壓均實現(xiàn)了穩(wěn)定控制,如圖5所示。這進(jìn)一步驗證了本文所設(shè)計的控制策略的有效性。
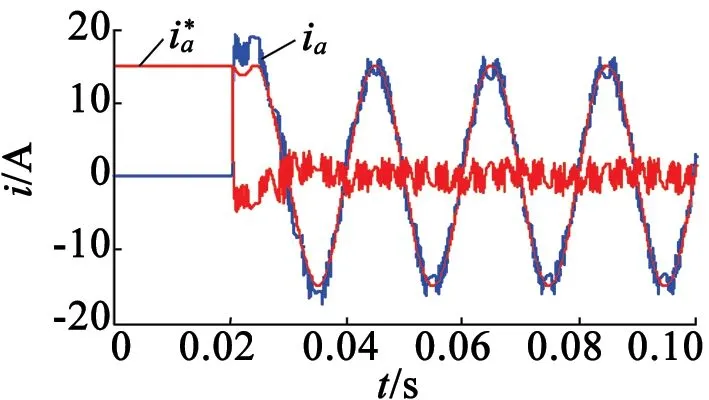
(a) 指令電流、實際電流、電流誤差
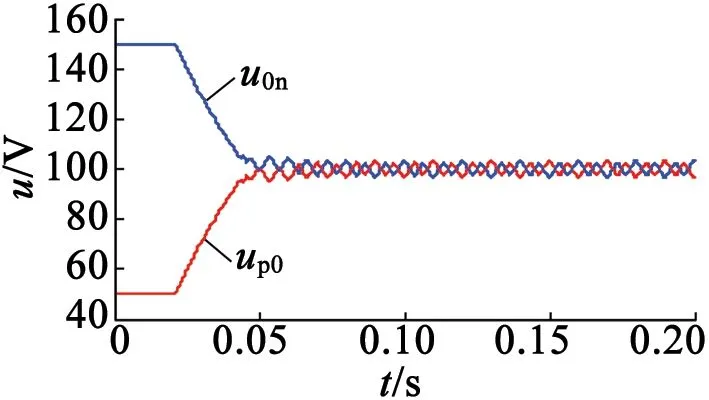
(b) 中點電壓
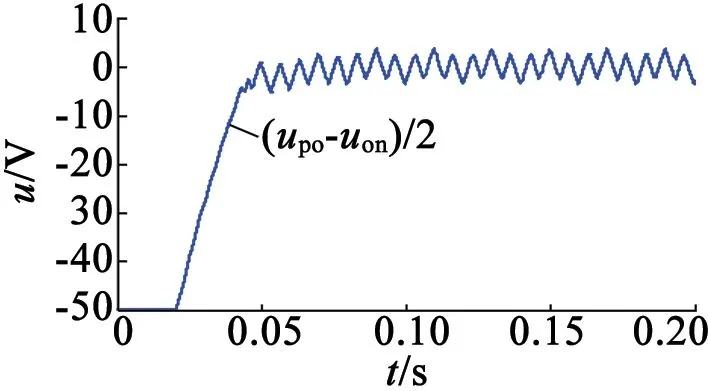
(c) 中點電壓偏移量
4 實驗研究
為了對所設(shè)計的控制策略進(jìn)行驗證,搭建了三電平逆變器的實驗平臺,如圖6所示。主控芯片選擇為DSP28335。實驗平臺主要包括控制板、逆變器主電路、信號采集板和負(fù)載等幾部分。實驗中的參數(shù)與仿真一致,如表1所示。
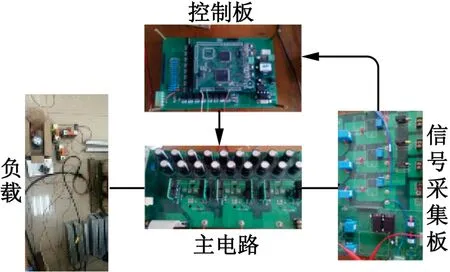
圖6 實驗平臺
圖7給出了電流幅值為15A、電流環(huán)寬為4A時采用本文的控制策略所得到的穩(wěn)態(tài)實驗結(jié)果。其中,Sa1為驅(qū)動信號,Uab為線電壓。由圖7可見,本文的方法可以同時實現(xiàn)電流控制和直流側(cè)中點電壓平衡控制,且無需權(quán)重因子。
圖8給出了直流側(cè)電壓存在偏差時的采用本文的控制策略所得到的動態(tài)實驗結(jié)果。實驗時,電流環(huán)寬依然設(shè)定為4A。
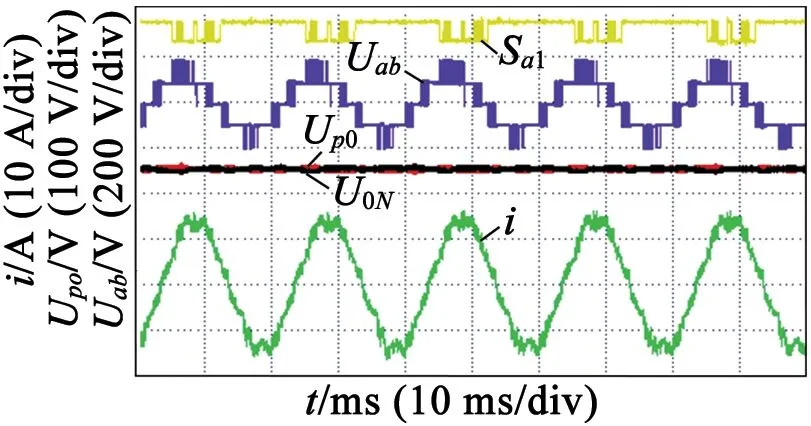
圖7 穩(wěn)態(tài)實驗結(jié)果

圖8 動態(tài)實驗結(jié)果
由圖8可見,當(dāng)電流指令設(shè)定為15A時,由于調(diào)制度較大,小矢量的使用較少,因此其直流側(cè)上下電容電壓可以自動平衡。當(dāng)電流指令突減為10A時,調(diào)制度減小,此時小矢量的使用增多,無中點電壓平衡控制時,其直流側(cè)電壓偏差迅速增大,電流也出現(xiàn)了明顯的畸變,如圖8(a)中的區(qū)域A所示。當(dāng)加入中點電壓平衡控制后,直流側(cè)電壓迅速恢復(fù)平衡,如圖8(a)中的區(qū)域B所示。圖8(b)對圖8(a)中的區(qū)域B進(jìn)行了放大。由圖8(b)可以清楚地看到,加入本文的中點電壓平衡控制策略時,直流側(cè)電壓迅速恢復(fù)平衡,電流的畸變率也明顯減小。由此可見,本文所設(shè)計的優(yōu)化無權(quán)重因子模型預(yù)測控制方法可以同時實現(xiàn)電流和直流側(cè)電壓平衡控制,且具有較好的動穩(wěn)態(tài)特性。
5 結(jié) 語
本文提出了一種優(yōu)化的三電平逆變器無權(quán)重因子模型預(yù)測控制方法。該方法分別對電流和直流側(cè)中點電壓平衡進(jìn)行控制,從而消除了權(quán)重因子。同時,該方法給出了最優(yōu)的電壓矢量選擇方法,從而簡化了算法,提高了逆變器的安全運行性能。仿真和實驗結(jié)果驗證了該方法的有效性。
[1]ALEPUZS,BUSQUETS-MONGES,BORDONAUJ,etal.Interfacingrenewableenergysourcestotheutilitygridusingathree-levelinverter[J].IEEETransactionsonIndustrialElectronics,2006,53(5):1504-1511.
[2]MARTINEZJCR,KENNELRM,GEYERT.Modelpredictivedirectcurrentcontrol[C]//IEEEInternationalConferenceonIndustrialTechnology.IEEE,2010:1808-1813.
[3] GEYER T,OIKONOMOU N,PAPAFOTIOU G,et al.Model predictive pulse pattern control[C]//Energy Conversion Congress and Exposition.IEEE,2011:3306-3313.
[4] 劉濤濤,黃落成,張曉.三電平有源電力濾波器模型預(yù)測電流控制方法研究[J].工礦自動化,2013,39(9):100-103.
[5] 楊勇,樊明迪,謝門喜,等.三電平三相逆變器快速有限控制集模型預(yù)測控制方法[J].電機(jī)與控制學(xué)報,2016,20(8):83-91.
[6] 王付勝, 文鵬, 張興.三電平環(huán)寬自適應(yīng)準(zhǔn)定頻滯環(huán)模型預(yù)測控制研究[J].電氣工程學(xué)報,2016,11(4):9-14.
[7] 夏長亮,張?zhí)煲?周湛清,等.結(jié)合開關(guān)表的三電平逆變器永磁同步電機(jī)模型預(yù)測轉(zhuǎn)矩控制[J].電工技術(shù)學(xué)報,2016,31(20):83-92.
[8] VARGAS R,CORTéS P,AMMANN U,et al.Predictive control of a three-phase neutral-point-clamped inverter[J].IEEE Transactions on Industrial Electronics,2007,54(5):2697-2705.
[9] RODRIGUEZ J,PONTT J,CORTES P,et al.Predictive control of a three-phase neutral point clamped inverter[C]//Power Electronics Specialists Conference,2005.IEEE,2005:1364-1369.
[10] RODRIGUEZ J,CORTES P.Predictive control of a three-phase neutral-point clamped inverter[M]//Predictive Control of Power Converters and Electrical Drives.John Wiley & Sons,Ltd,2012:65-79.
[11] 張永昌,楊海濤.異步電機(jī)無速度傳感器模型預(yù)測控制[J].中國電機(jī)工程學(xué)報,2014,34(15):2422-2429.
[12] 劉普,王躍,叢武龍,等.模塊化多電平換流器優(yōu)化模型預(yù)測控制策略研究[J].中國電機(jī)工程學(xué)報,2014,34(36):6380-6388.
[13] 杜少通,伍小杰,周娟,等.一種采用虛擬磁鏈模型預(yù)測的新型PWM算法[J].中國電機(jī)工程學(xué)報,2015,35(3):688-694.
[14] 羅德榮,姬小豪,黃晟,等.電壓型PWM整流器模型預(yù)測直接功率控制[J].電網(wǎng)技術(shù),2014,38(11):3109-3114.
[15] 張永昌,楊海濤.感應(yīng)電機(jī)模型預(yù)測磁鏈控制[J].中國電機(jī)工程學(xué)報,2015,35(3):719-726.
[16] ROJAS C A,RODRIGUEZ J,VILLARROEL F,et al.Predictive torque and flux control without weighting factors[J].IEEE Transactions on Industrial Electronics,2013,60(2):681-690.
[18] LIM C S,LEVI E,JONES M,et al.FCS-MPC-Based current control of a five-phase induction motor and its comparison with pi-pwm control[J].IEEE Transactions on Industrial Electronics,2013,61(1):149-163.
[19] CARRARO M,ZIGLIOTTO M.Hierarchical direct predictive control of PMSM drives[C]//Predictive Control of Electrical Drives and Power Electronics.IEEE,2011:3-9.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03