永磁同步電機轉矩切換響應分析及仿真
2017-05-30 06:31:28崔高健張增帥李紹松劉小勇竇景雷
微特電機 2017年12期
關鍵詞:控制策略
崔高健,張增帥,李紹松,劉小勇,竇景雷,李 斌
(長春工業大學,長春 130012)
0 引 言
電動汽車因節能環保而成為新能源汽車研究的熱點[1],此外,相對于傳統汽車,其振動噪聲影響較小。電機、電池、控制器的成熟應用,使電動車性能較傳統汽車有很大的提高[2]。
永磁同步電機(以下簡稱PMSM)作為電動汽車的驅動源,其主要由轉子、定子及其端蓋等各部件組成。PMSM在轉子結構上區別于其他類型的電機,電機轉子結構不同,在制作過程、控制方法、電機性能、應用環境上也不盡相同。PMSM具有力矩響應快、易控制等特點,因而被廣泛應用于驅動電動汽車[3-4],對于PMSM調速系統的控制策略主要有電流矢量控制策略和直接轉矩控制策略。
電機輸出轉矩切換控制過程中存在的振動會影響電動車整車的舒適性、穩定性、安全性[5]。目前,對于電流矢量控制策略和直接轉矩控制策略的理論研究及控制策略層出不窮[6],但是哪一種控制策略對高頻振蕩轉矩跟蹤性更好,沒給出過明確的結論,本文以面貼式PMSM為研究對象,以周期性方波信號模擬電動汽車為產生期望的補償橫擺力矩所需要的轉矩來作為控制系統的輸入,建模并仿真比較電流矢量控制與直接轉矩控制對于高頻轉矩切換的適應性和跟蹤性的效果。本文結構由兩種控制策略分析、仿真結果及分析、結論4部分組成。
1 PMSM直接轉矩控制
對于直接轉矩控制而言,PMSM的控制系統主要根據實際電機電磁力矩與期望轉矩之間的誤差,以及實際在定子上合成旋轉磁場的磁鏈與給定的定子磁鏈之間的誤差,并且依據總磁鏈所經過的扇區來選擇逆變器的開關狀態,從而使電機能夠在所預定的軌跡運行。

圖1 α-β坐標系與ABC坐標系
靜止坐標系如圖1所示,基于該坐標系的電壓方程:
(1)
式中:ua,ub,uc分別是電機定子三相繞組的電壓矢量。可以用逆變器的開關狀態向量Sa,Sb,Sc表示:
(2)
由式(1)與式(2)聯合化簡,可以得出:
(3)
式中:Sa,Sb,Sc為開關信號狀態向量,分別為控制圖2中逆變器每條臂上下IGBT門極,用于控制晶體管的導通與關斷,當Si(i=a,b,c)取值為1時,管導通,下管關斷;相對應的,當Si(i=a,b,c)取值為0時,下管導通,上管關斷。
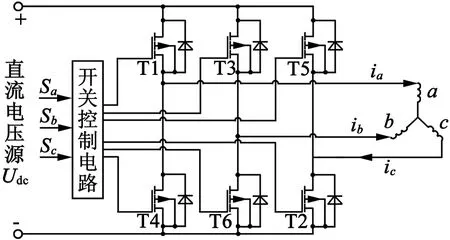
圖2 逆變器原理圖
靜止坐標系下對應的電流方程與電壓方程式(1)是對偶關系,在這里就不再敘述。
磁鏈方程:
(4)
轉矩方程:
(5)
對式(5)求導得:
(6)
依據式(6)可以看出,若定子磁鏈ψs為定值,那么電機轉矩是隨著轉矩角的變化而變化,改變磁鏈旋轉的速度和方向可以改變轉矩角的大小。由此可知,直接轉矩控制的基本思想就是在保證磁鏈幅值不變的前提下,控制轉矩角的變化來控制電磁轉矩。因此,根據磁鏈幅值、轉矩以及合成磁鏈經過扇區的變化情況,確定出控制逆變器的8組電壓控制矢量(其中有兩組電壓矢量為零矢量,而每組電壓矢量由控制逆變器開斷的3個0或1狀態組成),來保證磁鏈幅值基本恒定和保證轉矩能達到期望值。8組電壓控制矢量的選取規則如表1所示[7],表中的零矢量的選取主要依據盡量減少開關頻率的原則選定。
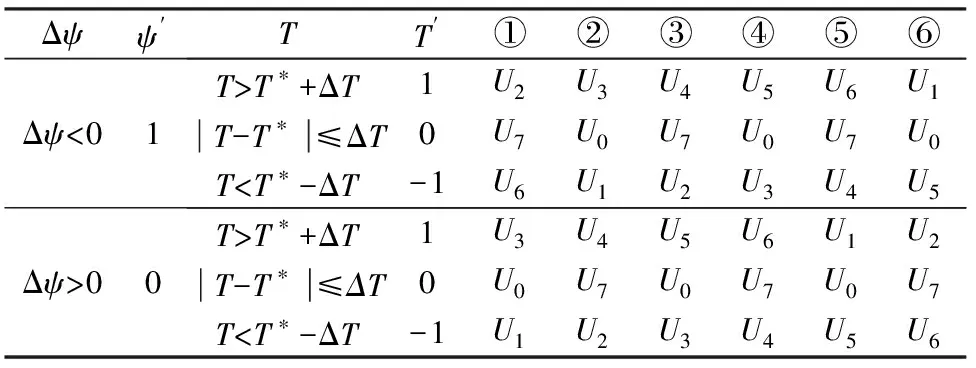
表1 逆變器開關參考表
表1中各變量表示如下:Δψ為磁鏈偏差;ψ′為磁鏈狀態;T為電機輸出的實際轉矩大小;T*為期望轉矩的大小;ΔT為轉矩偏差;T′為轉矩狀態;Ui(i=1~6)Ui的取值主要依據盡量使逆變器橋臂開關關斷次數最小為原則選定。①~⑥磁鏈扇區,各扇區與電壓矢量對應關系如圖3所示[8]。直接轉矩控制的控制框圖如圖4所示。
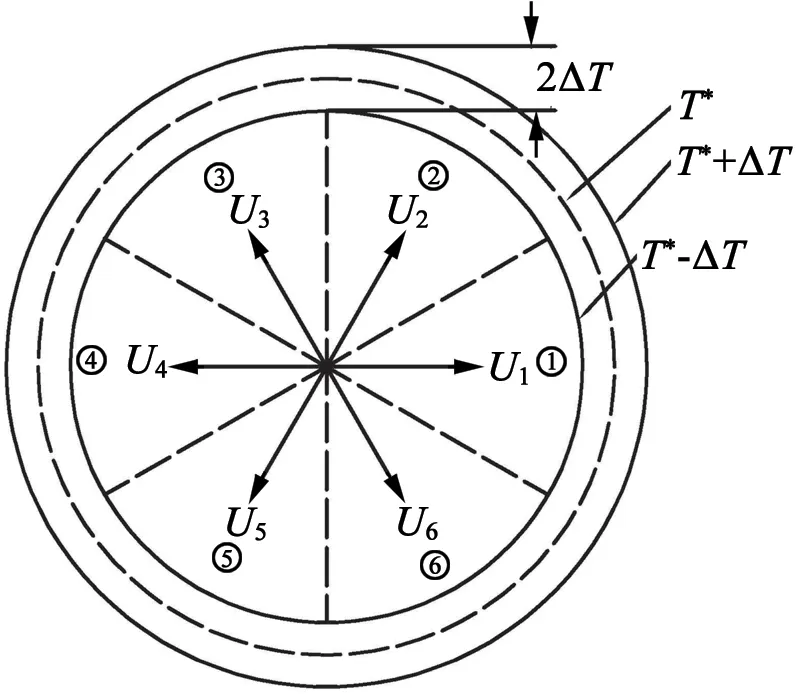
圖3 電壓矢量狀態與扇區關系圖
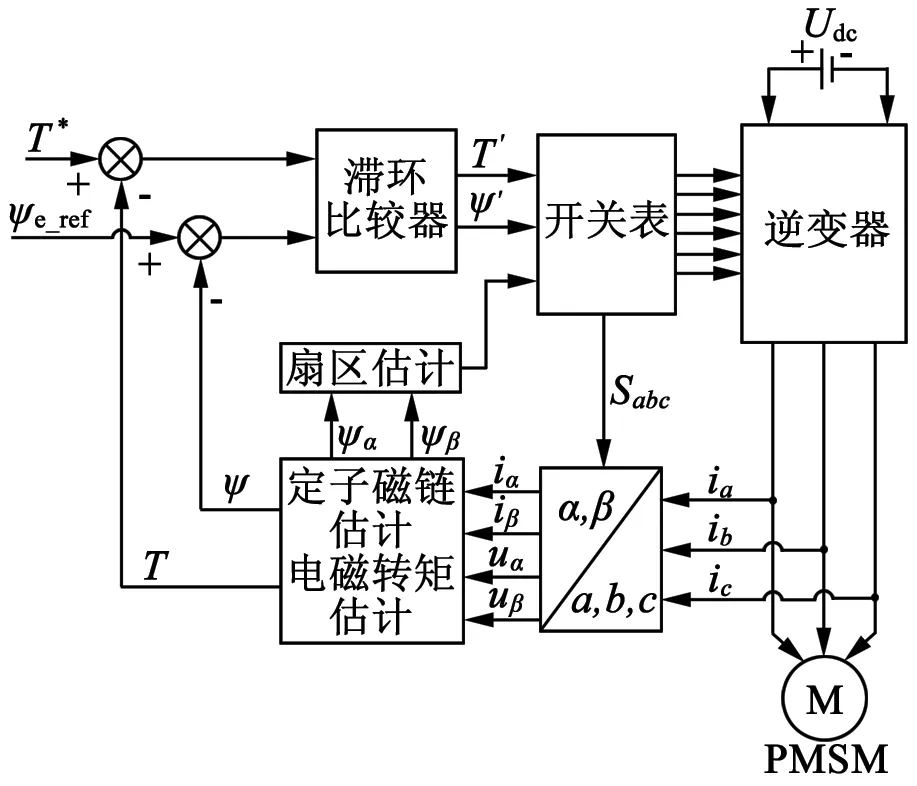
圖4 直接轉矩控制框圖
2 PMSM電流矢量控制
PMSM矢量控制系統的電流控制方法有id=0控制、力矩電流比最大控制、功率因數等于1的控制、恒磁鏈控制。id=0控制是其中的一種,該控制方法簡單、計算量小,對直軸電流的期望值為0[9],理想情況下不會產生直軸電樞反應,因此不會發生電機的去磁現象,定子電流產生的空間磁勢與永磁體勵磁磁場正交,電磁力矩的大小與交軸電流成線性關系,此時PMSM與直流電機模型近似,有著近似的性能特點,所有定子上的電流均用來產生電磁力矩,控制效率較高,因此被廣泛引用。
PMSM運行時,在ABC坐標系中,若將定子三相繞組中A相作為空間坐標系的參考軸線,dq0坐標系如圖5所示。
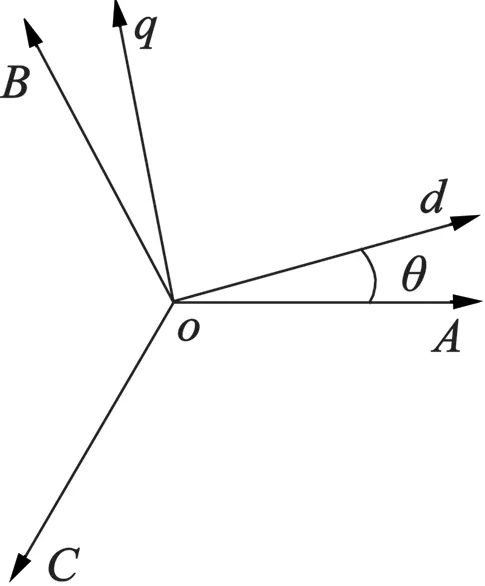
圖5 dqo坐標系
假設PMSM在A,B,C在坐標系下的三相對稱電流:
(7)
根據Park轉換定理可知:

(8)
式中:θ為d軸和A相軸線的夾角,φ為A相定子組軸線和d軸方向一致時A相電流的初始相位。將式(7)與式(8)聯立化簡可得:
(9)
當轉子磁極軸線和定義的d軸軸線重合時,依據磁場定向控制理論,電機電流的初始相位為180°,所以id=0,iq=I·e,其中I是相電流的有效值,e為單位向量。
基于d-q旋轉坐標系,力矩公式可表示:
Te=p·[ψfiq+(Ld-Lq)·idiq]
(10)
由于面貼式PMSM的交軸與直軸電感相同,即Lq=Ld≠0,則:
Te=pψfiq=pψfIe
(11)
式中:p,ψf分別為極對數和永磁體產生的磁鏈;e為單位向量。
2r-2s變換關系如下:
(12)
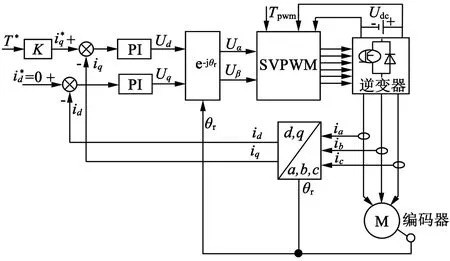
圖6 id=0控制框圖
3 仿真結果及分析
電動汽車在路況比較差的情況下進行制動、轉向,尤其是在左右車輪附著系數不一樣時,為保證車輛狀態處于穩定,往往會對每一個輪轂電機進行實時的轉矩分配,此時需要電機輸出的轉矩能夠跟蹤上車輛所需切換轉矩,這種切換的頻率一般是很高的。本文實驗仿真的輸入是假定一個固定頻率(2 Hz)和固定幅值(10 N·m)的方波,如圖7所示,以模擬現實中電動汽車需要的變化轉矩,對兩種基本的控制方法的轉矩跟蹤性能進行仿真,電機參數如表2所示。
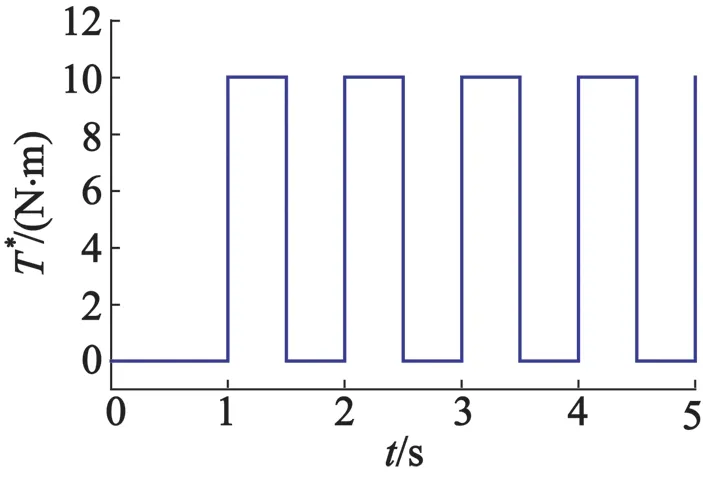
圖7 仿真模型輸入
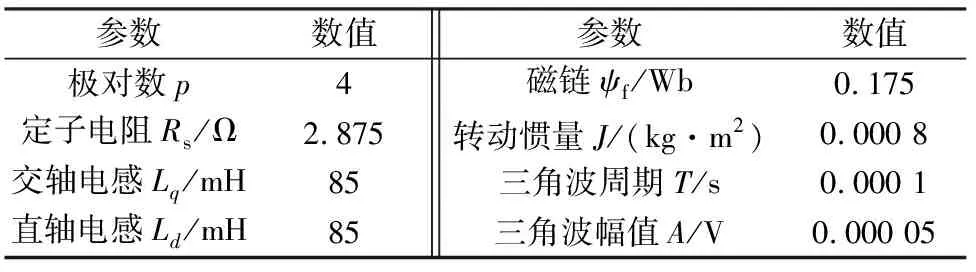
參數數值參數數值極對數p4磁鏈ψf/Wb0.175定子電阻Rs/Ω2.875轉動慣量J/(kg·m2)0.000 8交軸電感Lq/mH85三角波周期T/s0.000 1直軸電感Ld/mH85三角波幅值A/V0.000 05
試驗仿真結果如圖8~圖11所示,其中,圖8、圖10顯示的是系統5 s的仿真結果,圖9、圖11分別為圖8、圖10中仿真時間為1 s處的局部放大圖。具體仿真結果如表3所示。
從仿真結果分析來看,直接轉矩控制比電流矢量控制而言,響應速度快,但是輸出轉矩脈沖較大,不能很好地跟蹤目標期望轉矩。若將該控制策略用于電動汽車上的PMSM,不僅沒有改善由于濕滑路面產生擺動而影響車輛平穩性和舒適性,而且會加劇車身的抖動,降低車輛的性能,因此該控制方式不適用于電動汽車PMSM;而id=0控制,盡管在轉矩的動態響應過程中響應時間較直接轉矩控制長,但是對汽車整體的動態響應影響較小,同時電機輸出轉矩抖動很小,對于目標期望轉矩能較好地跟蹤。

圖8 直接轉矩控制的仿真波形
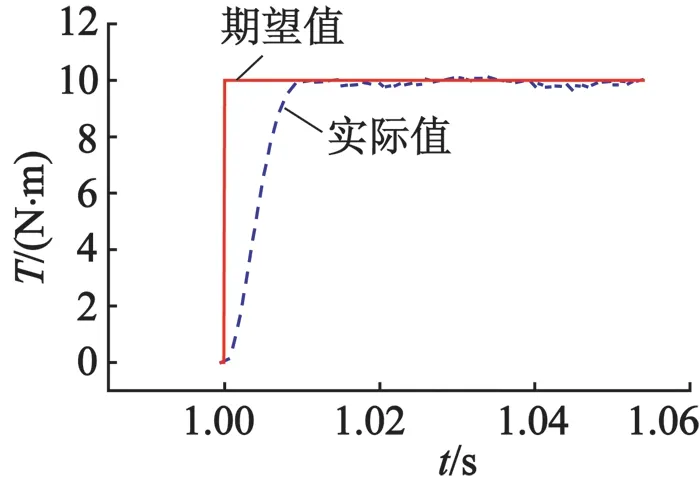
圖9 直接轉矩控制1 s處局部放大
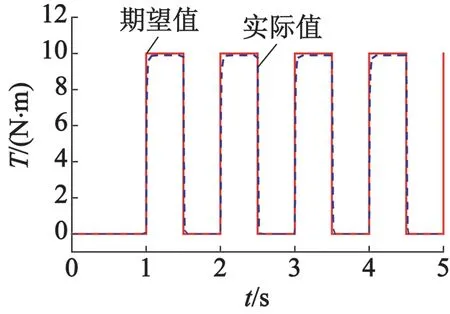
圖10 id=0控制的仿真波形
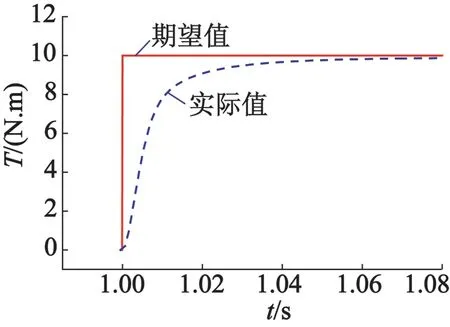
圖11 id=0控制1 s處局部放大
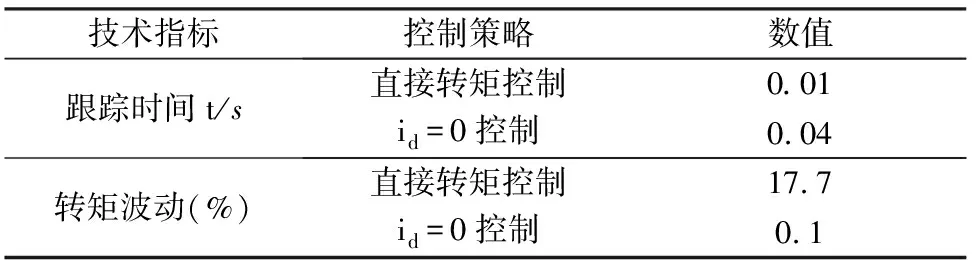
技術指標控制策略數值跟蹤時間t/s直接轉矩控制0.01id=0控制0.04 轉矩波動(%)直接轉矩控制17.7id=0控制0.1
4 結 語
1) 在分析了PMSM及其兩種主要的控制策略基礎上,以面貼式PMSM為研究對象,對兩種不同的控制策略進行建模仿真;
2) 對比分析兩者的仿真結果,表明電流矢量控制策略相對于直接轉矩控制,跟蹤速度稍慢,但是超調量很小,對電動汽車的舒適性、穩定性影響較小,更適合用于控制PMSM來驅動電動汽車。
[1]YUANL,CHENH,RENB,etal.Modelpredictiveslipcontrolforelectricvehiclewithfourin-wheelmotors[C]//ControlConference.IEEE,2015:7895-7900.
[2]MUTOHN.Drivingandbrakingtorquedistributionmethodsforfront-andrear-wheel-independentdrive-typeelectricvehiclesonroadswithlowfrictioncoefficient[J].IEEETransactionsonIndustrialElectronics,2012,59(10):3919-3933.
[3]MORELF,LIN-SHIX,RéTIFJM,etal.Apredictivecurrentcontrolappliedtoapermanentmagnetsynchronousmachine,comparisonwithaclassicaldirecttorquecontrol[J].ElectricPowerSystemsResearch,2008,78(8):1437-1447.
[4] 王鑫,李偉力,程樹康.永磁同步電動機發展展望[J].微電機, 2007,40(5):69-72.
[5] 張緩緩,王慶年.電動輪驅動電動汽車直線行駛轉矩協調試驗研究[J].汽車技術,2010,(8):16-19.
[6]REZACMFS,ISLAMMD,MEKHILEFS.Areviewofreliableandenergyefficientdirecttorquecontrolledinductionmotordrives[J].Renewable&SustainableEnergyReviews,2014,37(3):919-932.
[7]YU-WENHU,TIANC,YOUZQ,etal.Directtorquecontrolsystemandsensorlesstechniqueofpermanentmagnetsynchronousmotor[J].ChineseJournalofAeronautics,2003,16(2):97-102.
[8]OULEDALIO,MEROUFELA,WIRAP,etal.DirecttorquefuzzycontrolofPMSMbasedonSVM[J].EnergyProcedia,2015(74):1314-1322.
[9]GROUZF,SBITAL,BOUSSAKM,etal.FDIbasedonanadaptiveobserverforcurrentandspeedsensorsofPMSMdrives[J].SimulationModellingPractice&Theory,2013,35(6):34-49.
[10] 郎寶華,劉衛國,周熙煒,等.空間矢量脈寬調制的仿真研究及應用[J].電機與控制應用,2007,34(8):6-9.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36