彈道修正用多自由度超聲電動機驅動電路研究
2017-05-30 06:31:24楊建春黃學功
微特電機 2017年12期
關鍵詞:信號
楊建春,王 炅,黃學功,孫 棟
(南京理工大學,南京 210094)
0 引 言
頭部偏轉式彈道修正是一種新型二維彈道修正方法,它的彈頭與彈體部分并不固連在一起,兩者可相對轉動,通過驅動裝置控制,可偏轉彈頭偏離彈體軸線,使彈頭的迎風面和背風面存在壓差,產生相對于彈體的氣動控制力和氣動力矩,以達到修正彈藥落點的目的。與一般的二維彈道修正相比,它結構簡單,原理清晰易懂[1-2]。
超聲電動機是上個世紀80年代開始發展起來的一種新型微特電機,它基于壓電陶瓷的逆壓電效應,讓定子彈性體在超聲頻段產生微幅振動,通過定子和轉子間的摩擦,帶動轉子轉動或移動[3-4]。與傳統的電磁電機相比,超聲電動機具有輸出力矩大、響應速度快、體積小質量輕、低噪聲、不受電磁干擾等優點,在精密機械、航空航天、機器人等領域都有較好的應用前景[5]。若使用多個單自由度超聲電動機來實現二維彈道修正,會使驅動機構整體尺寸偏大、結構復雜,球形多自由度超聲電動機能夠提供頭部偏轉式彈道修正所需要的偏轉運動和旋轉運動,是作為彈頭偏轉彈道修正的良好的驅動裝置。
目前國內外對球形多自由度超聲電動機的驅動電路研究較少,沒有現成的驅動方案可供使用。此外,在彈丸內部無法直接提供超聲電動機驅動所需的高壓電源,因此無法利用高壓功率放大芯片直接將電壓放大,需要利用其他器件來實現,且彈丸內部空間有限,對驅動電路的小型化提出了較高的要求。針對以上問題,提出了一種高效的控制方法,并設計了相應的驅動方案,最后進行了實驗驗證。
1 多自由度超聲電動機驅動原理與控制方法
1.1 多自由度超聲電動機驅動原理
圖1為多自由度超聲電動機結構圖,包括球轉子、3個結構相同的定子和底座。3個定子環繞球轉子兩兩相差120°對稱分布,定子軸線與水平面之間的夾角為15°。
定子由定子彈性體、壓電陶瓷片、摩擦材料和預緊導向機構組成,預緊導向機構的功能是提供定轉子之間的預緊力,保證定子彈性體軸線位置固定。當給粘貼在定子彈性體底面的壓電陶瓷片施加一定頻率的交流信號時,就能在定子彈性體表面激發出如圖2所示的面外彎曲模態。
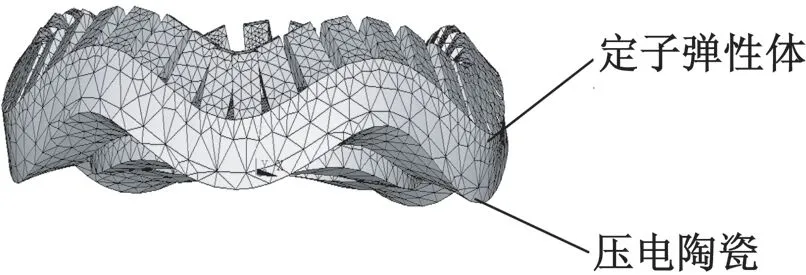
圖2 定子彈性體的面外彎曲模態
其模態振型可表示[3]:
φA=R(r)sin(nθ)
其正交模態振型:
φB=R(r)cos(nθ)
式中:R(r)為沿定子彈性體徑向的位移分布函數;sin(nθ),cos(nθ)為沿定子彈性體周向的位移分布函數。當給壓電陶瓷片施加兩列同頻等幅相位差為90°的交流信號時,激發出的兩相模態響應:
ωA=R(r)sin(nθ)δcos(ωnt)
ωB=R(r)cos(nθ)δsin(ωnt)
式中:δ為兩相模態的響應幅值;ωn為驅動電壓的工作頻率。兩相模態響應疊加形成行波:
ω=R(r)δsin(nθ-ωnt)
如圖3所示,定轉子由于預緊力的存在而緊密接觸,在行波定子齒端各個質點的作用下,球轉子獲得了和定子行波運動方向相反的運動。也就是說,給壓電陶瓷片施加兩相交流信號,就能夠驅動球轉子繞定子軸線轉動。

圖3 定子驅動轉子示意圖
多自由度超聲波電動機包括3個定子,每個定子都能單獨驅動球轉子繞其軸線轉動,當3個定子一起驅動球轉子時,球轉子就獲得了多自由度的運動。
1.2 彈道修正用多自由度超聲電動機控制方法及控制信號
多自由度超聲電動機輸出性能好,且能夠提供修正彈道所需的旋轉運動和偏轉運動,是彈道修正機構良好的驅動裝置。基于多自由度超聲電動機的彈頭偏轉機構如圖4所示。
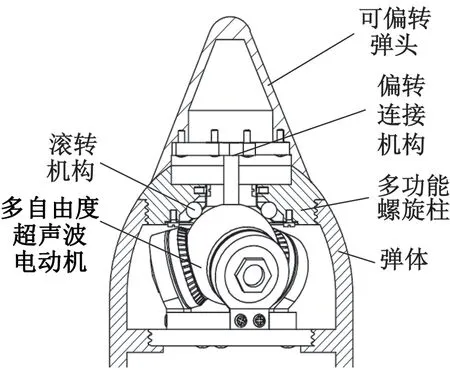
圖4 基于多自由度超聲電動機的彈頭偏轉機構
基于多自由度超聲電動機的彈頭偏轉機構運動過程可分為兩步。第一步,多自由度超聲電動機驅動可偏轉彈頭偏離彈體軸線,直至彈頭軸線與彈體軸線之間的夾角達到指定值;第二步,多自由度超聲電動機驅動已經完成偏轉動作的可偏轉彈頭繞彈體軸線轉動,直至到達能夠修正彈道的指定位置。第一步為偏轉運動,為了高效的完成偏轉動作,由其中一個定子來驅動球轉子轉動,另外兩個定子做駐波運動,使球轉子繞其中一個定子的軸線轉動;第二步為旋轉運動,這個運動需要3個定子以同樣的轉速來驅動球轉子,3個轉速在球轉子上的矢量疊加,使球轉子沿彈軸方向轉動。
綜上所述,為簡化多自由度超聲電動機的驅動電路,多自由度超聲電動機的一個定子單獨驅動,另外兩個定子可以由同一個交流信號來驅動,即基于多自由度超聲電動機的彈頭偏轉機構需要的驅動信號為ηAsin(ω1t),ηAcos(ω1t),ηBsin(ω2t),ηBcos(ω2t),為4路幅值、頻率和相位分別可調的交流信號。驅動信號頻率取決于多自由度超聲電動機定子彈性體的共振頻率,一般在20~100 kHz之間,驅動信號幅值一般在幾十伏至幾百伏之間,本文中設計為峰峰值300 V,此外,要求每兩相交流信號之間的相位差連續可調。
2 驅動電路方案
目前較為成熟的超聲電動機驅動電路是由高頻信號發生器產生基準的方波信號,再由分頻分相器將單相信號轉換成兩相信號,再經過逆變升壓,得到超聲電動機所需的高壓交流信號[6]。對于多自由度超聲電動機而言,需要至少4路信號,使用傳統的驅動電路會使得電路尺寸大、多路信號之間調節不一致。針對這一問題,提出使用DDS芯片AD9959作為驅動電路的信號發生器。多自由度超聲電動機的驅動電路示意圖如圖5所示。

圖5 多自由度超聲電動機驅動電路示意圖
2.1 基于DDS的正弦信號發生電路
基于DDS的正弦信號發生電路由微控制器MCU和直接數字頻率合成器DDS組成。DDS是產生正弦信號的核心芯片,輸出波形的幅值、相位和頻率的大小需要通過MCU來配置DDS的內部寄存器決定。故MCU的作用是向DDS發送幅值、相位和頻率控制字,接收反饋信號和進行信號處理,單片機就能夠滿足以上要求,無需使用成本更高的ARM和DSP。MCU和DDS之間的連接情況如圖6所示。
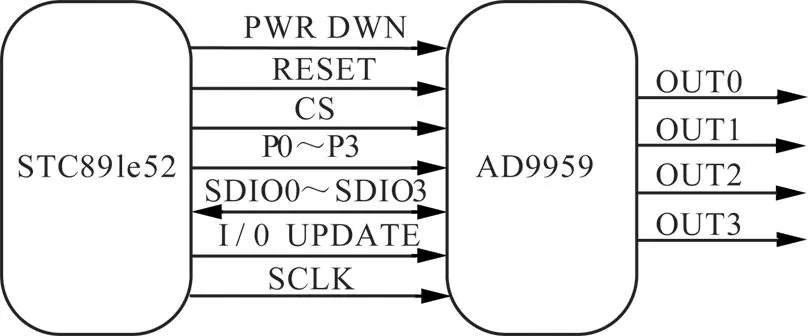
圖6 MCU和DDS的連線示意圖
圖6中,PWR_DWN為外部斷電允許位;RESET為復位引腳;CS為片選信號引腳;I/O UPDATE在其上升沿將I/O口數據傳遞給AD9959內部寄存器;SCLK為串行操作時的時鐘輸入端,在其上升沿寫入數據,下降沿讀出數據;P0~P3用于調制方式的選擇;SDIO0~SDIO3為串行數據輸入輸出口。單片機通過這些I/O與DDS相連,使DDS輸出4相幅值、頻率和相位分別可調的交變信號,但這些信號還不能直接用來驅動超聲電動機,還需對其進行進一步處理。
2.2 有源濾波電路
AD9959的輸出信號為脈動直流信號,首先要濾去其中的直流分量才能得到純凈的交流信號。DDS的輸出信號直接由其內部的DAC輸出,具有一定的諧波分量和時鐘干擾,需要對DDS的輸出信號進行濾波處理。濾波電路按其有無放大器件可分為無源濾波器和有源濾波器,目前一些文獻中用電阻、電容和電感搭建了高階橢圓形無源濾波器,取得了較好的濾波效果[7]。但每一路濾波電路均使用了較多的無源器件(電容和電感),不利于電路的小型化。有源濾波電路體積小、質量輕,且可以自動補償各次諧波,除了濾波之外,還可以放大輸入信號,作為后級放大電路的前置放大器,采用了四通道運算放大芯片OPA1654來搭建有源濾波電路,使電路高度集成,設計的一路有源濾波電路原理圖如圖7所示。
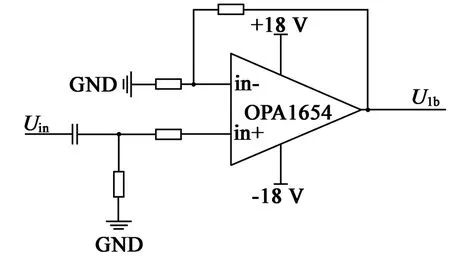
圖7 一路有源濾波電路原理圖2.3 放大電路
AD9959的輸出信號電壓峰峰值只有幾百毫伏,輸出電流只有10 mA左右,不能直接用來驅動多自由度超聲電動機,要對其進行多次放大。前端有源濾波電路已使用OPA1654將交流信號的電壓峰峰值從幾百毫伏放大至±6 V,然后使用2片雙通道功率放大芯片TDA7265將輸出信號的電壓峰峰值放大至±12 V,最后通過高頻變壓器EE16將輸出電壓從±12 V放大至±150 V,且輸出信號滿足一定的功率要求,放大電路示意圖如圖8所示。
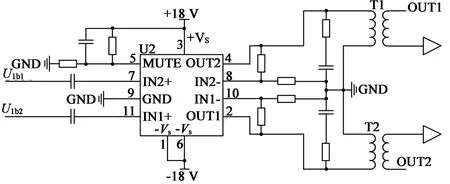
圖8 放大電路示意圖
3 輸出波形實驗
根據以上方案設計的彈道修正用多自由度超聲電動機驅動電路如圖9所示。由于尺寸限制以及防止信號互相干擾,將驅動電路中的各個模塊分別制板,同時也為下一步優化電路提供了便利。利用keil軟件編寫了控制程序,輸出了4路幅值、頻率、相位分別可調的驅動信號如圖10所示,輸出電壓峰峰值達到280 V,略小于設計值,基本滿足設計的需要。設計的驅動電路輸出電壓峰峰值可在0~280 V之間連續可調,工作頻率在20~100kHz之間連續可調,兩相信號之間的相位差可為任意值。如圖11所示,通過改變上位機中的幅值控制字,輸出的兩相信號幅值不等;如圖12所示,通過改變上位機中的頻率控制器,輸出的兩相信號頻率不同;如圖13(a)、圖13(b)所示,通過改變上位機中的相位控制字,兩相輸出信號之間的相位差發生了改變,因此驅動信號的幅值、頻率和相位都是可調的。
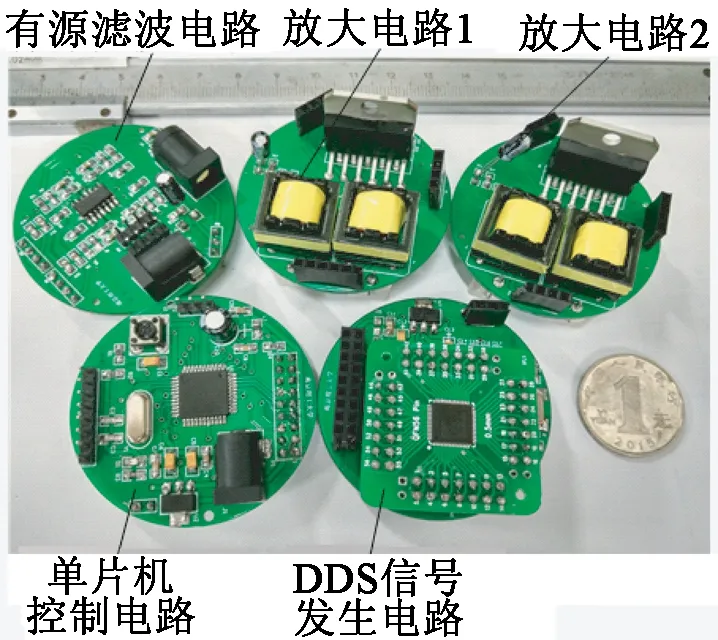
圖9 驅動電路實物圖
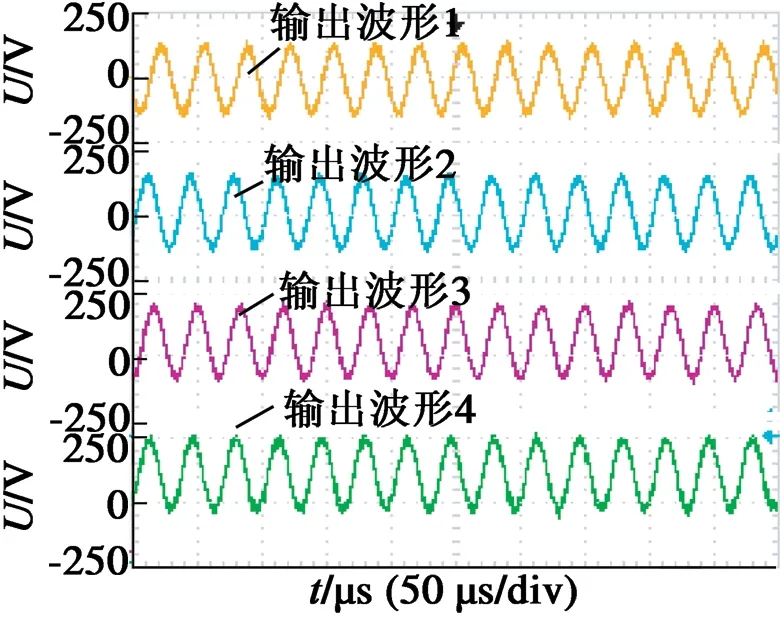
圖10 驅動電路四路輸出信
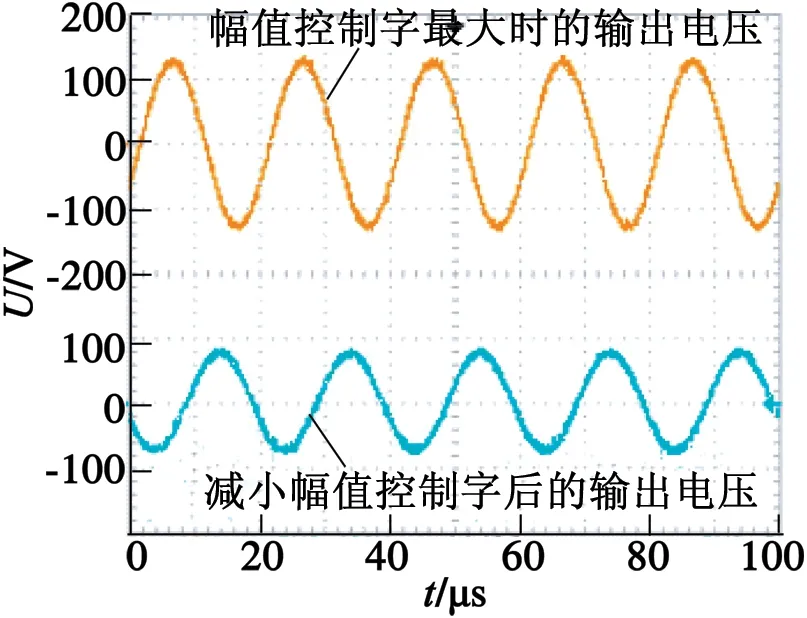
圖11 輸出信號幅值調節
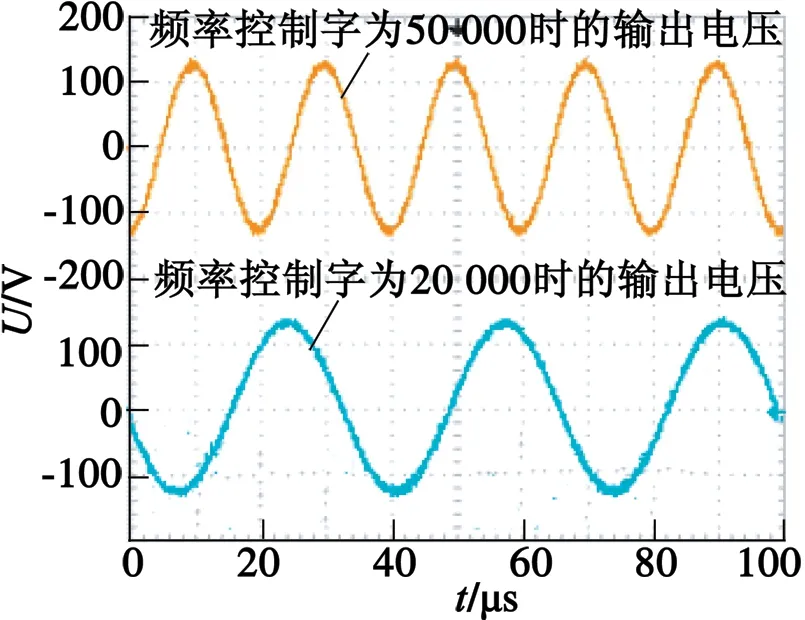
圖12 輸出信號頻率調節
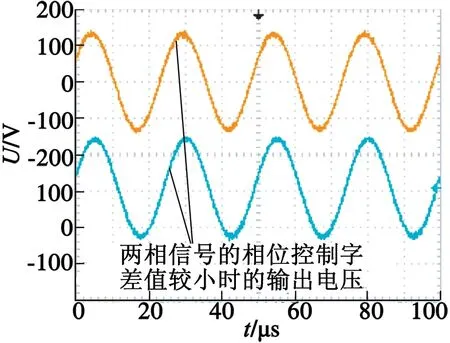
(a) 相位控制字較小時
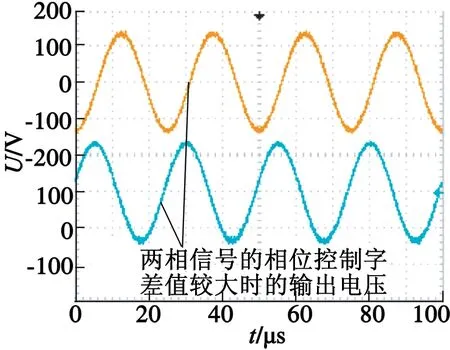
(b) 相位控制字較大時
4 結 語
本文以彈道修正用多自由度超聲電動機為驅動目標,設計了一種由DDS信號發生電路、有源濾波電路和功率放大電路/變壓器組成的多自由度超聲電動機驅動電路,現總結如下:1)根據多自由度超聲電動機驅動原理及彈頭偏轉過程,為了簡化驅動電路,提出了一種簡便控制方法;2)實驗證明,設計的驅動電路驅動電壓高,驅動信號穩定且方便調節,滿足設計要求;3)設計的驅動電路盡量使用了多通道集成芯片,加工的實物滿足小型化的要求。
[1] LANDERS M G,HALL L H,AUMAN L M,et al.Deflectable nose and canard controls for a fin-stabilized projectile at supersonic and hypersonic speeds[C]//21st AIAA Applied Aerodynamics Conference.Oralude,2003:1038-1052.
[2] SHOESMITH B,BIRCH T,MIFSUD M,et al.CFD analysis of a supersonic projectile with deflectable nose control[C]//Third Flow Control Conference,2006:904-917.
[3] 趙淳生.超聲電機技術與應用[M].北京:科學出版社,2007.
[4] 胡敏強.超聲電動機的研究及其應用[J].微特電機,2000,28(5):8-11,24.
[5] 郭吉豐,白洋,王劍.多自由度超聲波電機的研究進展和展望[J].振動與沖擊,2013,32(15):1-7,13.
[6] 胡敏強,金龍,顧菊平.超聲波電機原理與設計[M].北京:科學出版社,2005.
[7] 鄧耀華,吳黎明,張力鍇,等.基于FPGA的雙DDS任意波發生器設計與雜散噪聲抑制方法[J].儀器儀表學報,2009,30(11):2255-2261.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06