基于零漂修正和偏置補償的定子磁鏈觀測算法
2017-05-30 06:14:11盧亨宇劉彥呈郭昊昊程世超
微特電機 2017年12期
盧亨宇,劉彥呈,郭昊昊,程世超
(1.大連海事大學,大連 116026;2.國網遼寧省電力有限公司大連供電公司,大連 116085)
0 引 言
永磁同步電機憑借其功率密度高、效率高、控制性能優良等優點得到了廣泛應用。高效的控制策略需要獲取精確的轉子位置和速度信息,這些信息一般通過光電編碼器等傳感器獲取。傳感器的使用提高了電機控制成本,增加維護難度,降低了系統的可靠性。因此,國內外學者對永磁同步電機的無位置傳感器控制進行了深入的研究。
永磁同步電機無位置傳感器控制,根據其適用的轉速范圍,可分為兩類:一類是適用于中低速的高頻注入法,通過電機凸極效應對轉子位置進行估算。這類方法在中低速的估算精度高,隨著轉速升高,基頻信號與高頻注入信號之間的頻率越來越接近,導致濾波器難以提取位置信息,估算效果變差,并且此方法不適用于凸極率低的表貼式永磁同步電機。另一類是適用于中高速,基于電機模型的算法,通過計算反電動勢或磁鏈來求得轉子位置信息,主要包括:擴展卡爾曼濾波法、模型參考自適應法、滑模觀測器,反電動勢積分法等算法,其中反電動勢法結構簡單,易于實現,但反電動勢積分法采用了電壓積分模型,積分環節會受到積分初值和電壓電流偏置的影響產生漂移。為了解決電壓積分模型積分環節帶來的問題,通常用一階低通濾波器代替純積分[1-7],用于消除積分初值的影響,且能夠抑制漂移。但在電機低速運行頻率接近或者小于濾波器截止頻率時,低通濾波器法會帶來較大的幅值和相位誤差。對此,文獻[1]提出了3種算法將積分環節用低通濾波器和一階慣性環節合成,前兩種方案需要知道磁鏈幅值大小作為飽和函數的參數,磁鏈幅值的選取決定了算法的準確性,因此作者提出了基于正交模型的算法,此算法引入了閉環控制器,會在負載或者轉速突變的動態過程中引入誤差,所以該方法僅能對轉子位置進行檢測,不適用于閉環控制[2]。文獻[3]用可調截止頻率的低通濾波器替代積分器,該方法提高了電機低頻運行時低通濾波器的性能,但是仍然存在相位和幅值的偏差[4]。文獻[5]在低通濾波器后增加了幅值和相位的補償環節,提高了全速度范圍下低通濾波器的準確性。文獻[6]在此基礎上提出改進,調換低通濾波器與補償環節的順序,提高算法在轉速突變時的動態性能。低通濾波器法只能夠抑制零漂,不能夠將其完全消除,為此文獻[7-8]提出用帶通濾波器替代純積分環節,并對濾波器相位和幅值進行補償,該方法的參數選取較為困難,算法的精度依賴參數選擇。
本文在文獻[6]的基礎上進行改進,提出一種能夠完全消除零漂的改進型磁鏈計算方法,用于永磁同步電機轉子位置估算,并通過仿真和實驗驗證了該算法的有效性和可行性。
1 反電動勢積分法問題分析
1.1 反電動勢積分法原理
永磁同步電機α-β坐標系下的電壓方程可表示:
(1)
式中:ψsα,ψsβ為磁鏈在α-β軸分量;usα,usβ為定子電壓在α-β軸分量;isα,isβ為定子電流在α-β軸分量;Rs為定子電阻。
磁鏈方程在α-β坐標系表示如下:

(2)

(3)
通過電壓方程可得電壓積分型定子磁鏈表達式:
(4)
通過以上公式可以求得轉子位置,表達式如下:
(5)
在實際系統中電壓電流并非理想正弦信號,純積分環節受到電壓電流漂移和積分初值的影響,導致位置估算不準確,從而無法進行無位置傳感器的控制。
1.2 積分初值的影響
以α軸為例,將式(1)轉換成離散表達方式:
ψsα(k)=ψsα(k-1)+[usα(k)-isα(k)Rs]Ts=
(6)
式中:ψsα(0)是初始時刻磁鏈,數值不隨時間發生改變;Ts是采樣時間。從式(6)可以看出,積分受到磁鏈初值的影響,產生偏置。
1.3 電流和電壓的影響
反電動勢積分法中參與計算的電壓并非實際測量值,而是電壓給定值。由于逆變器非線性的影響,實際電壓不等于給定值,電流采樣時由于采樣電路的不對稱性,及軟件零位設置不準確,會產生偏置。把電流和電壓的偏差用Δusα和Δisα表示,程序計算中電壓電流可表示:
(7)

ψsα(k)=ψsα(k-1)+[usα(k)-isα(k)Rs]Ts=
(8)
可以看出,式(8)中存在一個偏差的累計量,如果直接采用純積分的方案,積分結果將會發生漂移甚至飽和,從而影響磁鏈計算,導致無法獲得正確的轉子位置信息。
2 算法理論分析
為了解決純積分帶來的影響,本文在傳統低通濾波器算法的基礎上,提出了一種能夠消除積分初值和零漂的改進算法。
2.1 傳統低通濾波器算法
為了方便公式推導,電壓電流磁鏈均以矢量的形式表示。將式(4)轉換到幅頻域上,可表示:
(9)

用一階低通濾波器代替積分環節可表示:
(10)
由以上兩式可以推導出:
(11)
從式(11)可以看出,當角速度ωe遠大于截止頻率ωc時,低通濾波器具有和純積分相同的特性;但在電機低速運行時無法滿足該條件,導致計算磁鏈相位超前幅值增大,降低截止頻率會增大低通濾波器時間常數,導致動態性能下降。
2.2 幅值及相位補償
由上可知,低通濾波器在輸入信號頻率較低的情況下將會帶來較大的幅值和相位的偏差,為了提高濾波器在電機低速運行時的性能,需對低通濾波器的幅值和相位進行補償。
由式(9)和式(10)可得:
(12)
可以得到其幅值和相位的關系:
(13)
交換低通濾波器與補償算法的位置能夠提高算法的動態性能[4]。以逆時針旋轉方向為正,可以得到在α,β軸的補償式:
(14)
(15)

當含有直流量的信號通過低通濾波器時,直流量的衰減僅與截止頻率ωc有關,截止頻率ωc越大,抑制偏置的能力越強,但低通濾波器不能完全消除直流偏置,僅能夠對其起到抑制的作用,所以為了消除直流偏置還需要進一步處理。
2.3 直流偏置的消除
文獻[9]提出一種消除磁鏈積分零漂的方法。在α-β坐標系下,求一個正弦周期內磁鏈最大值和最小值的平均,即能得到當前時刻的磁鏈零漂值,下面以α軸為例說明零漂修正的原理。ψmax_α是磁鏈在α軸的極大值,ψmin_α是磁鏈在α軸的極小值,由此可以計算出磁鏈中的直流漂移量ψerr_α:
(16)
ψα=ψsα-ψerr_α
(17)
此算法通過求周期極值對漂移進行修正,算法每周期更新一次修正值,忽略了在周期內積分發生的漂移。假設:
usα-isαRs=Asin(ωet+B)+C
(18)
式中:A,B,C分別代表電動勢的幅值相位以及偏置,將式(18)代入式(4)可得:
(19)

(20)

(21)
從式(21)可以看出,磁鏈分量中仍存在非正弦量,圖7是零漂修正后的波形與發生漂移的純積分波形對比。

圖1 純積分與零漂修正對比
可以看出,由于零漂修正值單個周期刷新一次,該算法不能夠對磁鏈漂移進行實時的修正,在單個周期內計算結果仍然存在誤差,并且在極值時刻出現突變。
本文將這種零漂修正算法與帶補償的低通濾波器(帶補償LPE)進行結合,提出一種能夠完全消除直流偏置的算法,其結構如圖2所示。

圖2 改進算法結構框圖
由上面分析可知,當直流量通過低通濾波器后,其輸出僅與濾波器截止頻率有關,不隨時間發生變化,在通過零漂修正后能夠消除該直流分量。圖3是3種算法的對比結果,在輸入信號中加入了5%的直流偏置。

圖3 零漂修正、帶補償LPF和改進LPF
從圖3上可以看出,帶補償LPE輸出發生了偏置,而積分零漂修正算法在極值處出現了突變的情況,并且仍存在一定的誤差,本文算法很好地消除了直流偏置。
3 仿真實驗
為了驗證改進低通濾波器算法的動靜態性能,通過MATLAB/Simulink,搭建了永磁同步電機矢量控制仿真模型,電機參數如表1所示。

表1 電機參數
本文采用了id=0的矢量控制策略,由于電機在零低速時反電動勢很小,無法用于轉子位置估算,所以采用了速度開環起動的控制方式[10],如圖4所示。電機在起動時選擇開關在1的位置,當電機到達10%額定轉速時切換至開關2,工作于無位置傳感器的閉環控制。

圖4 無位置傳感器矢量控制框圖
3.1 算法穩態性能驗證
首先驗證了改進算法在穩態下的性能,并與純積分算法進行對比。本文選取低通濾波器截止頻率為10 rad/s,電機運行在平穩狀態,轉速400 r/min。下文以β軸仿真結果進行說明,圖5是改進LPF法和純積分的對比圖,從圖5可以看出,純積分算法由于受到積分初值的影響發生了偏置,本文提出的改進算法能夠很好地消除積分初值的影響,磁鏈計算結果幾乎與參考曲線重合。

圖5 純積分、改進LPF的β軸定子磁鏈
為了驗證算法對直流漂移的抑制能力,在β軸電流增加了0.5 A的直流分量。可以看出,在純積分的算法下積分隨著時間增加,誤差累計發生漂移,本文提出的改進算法能夠很好地消除直流分量帶來的漂移,計算結果幾乎和參考磁鏈重合。

圖6 純積分、改進LPF的β軸定子磁鏈
3.2 算法動態性能驗證
為了驗證算法的動態性能,電機給定轉速在1 s時從200 r/min上升至500 r/min,并在β軸電流增加了1 A的直流分量,圖7用帶幅值和相位補償的低通濾波器與改進算法比較,其中圖7(a)是磁鏈觀測結果,圖7(b)是估算轉子位置對比,圖7(c)是估算轉子位置誤差對比。

(a) β軸定子磁鏈

(b) 轉子位置
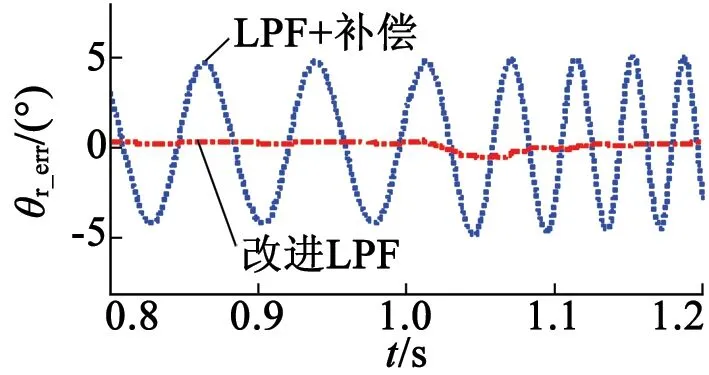
(c) 轉子位置誤差
從圖7對比可以看出,本文提出的改進算法能夠很好地消除直流偏置,補償了低通濾波器的缺陷,并且動態性能優良。
4 實物驗證
將本文改進的算法應用于實際永磁同步電機控制系統。將估算的轉子位置和速度與編碼器測量值進行比較,實驗數據通過控制板上的DA進行輸出,通過示波器進行觀察。
圖8是電機穩定運行在170 r/min,估算轉子位置和速度與編碼器測量對比。
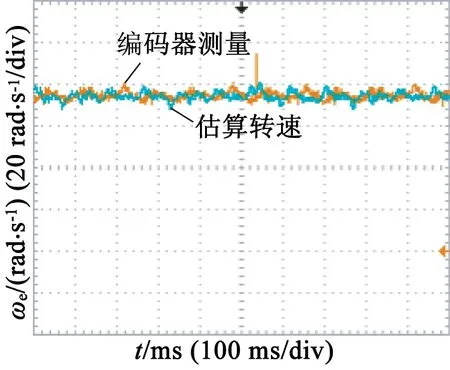
(a) 估算轉速與測量轉速

(b) 估算角度與測量角度
圖9是電機轉速由170r/min增加到245r/min,估算的轉子位置和速度與編碼器測量對比。
從實驗測試可以看出,改進的LPF算法能夠準
確估算轉子位置與速度,估算結果與編碼器測量比較,角度誤差小于1.5%,無位置傳感器運行時動靜態性能良好。

(a) 估算轉速與測量轉速

(b) 估算轉速與測量轉速
5 結 語
本文在低通濾波器代替積分器的基礎上進行了改進,結合了一階低通濾波器結構簡單的優勢,解決了低通濾波器不能消除直流漂移的缺陷,最終通過實驗驗證了本文算法能夠很好地消除積分初值和直流偏置的影響,算法計算量小,能夠用于反電動勢積分法無位置傳感器控制。
[1]HUJ,WUB.Newintegrationalgorithmsforestimatingmotorfluxoverawidespeedrange[J].IEEETransactionsonPowerElectronics,1998,13(5):969-977.
[2]HOLTZJ,QUANJ.Driftandparametercompensatedfluxestimatorforpersistentzerostatorfrequencyoperationofsensorlesscontrolledinductionmotors[J].IEEETransactionsonIndustryApplications,2003,39(4):1052-1060.
[3] 張旭,瞿文龍.一種低速下磁鏈觀測補償的新方法[J].電工電能新技術,2003,22(3):50-54.
[4] 張星,瞿文龍,陸海峰.一種能消除直流偏置和穩態誤差的電壓型磁鏈觀測器[J].電工電能新技術,2006,25(1):39-43
[5]LIYong,uangWenxin,uYuwen.owcostimplementationofstatorfluxorientedinductionmotordrive[C]//ProceedingsoftheEighthInternationalConferenceonElectricalMachinesandSystems.Piscataway,NJ,USA:IEEE,2005:1534-1538.
[6] 何志明,廖勇,何大為.定子磁鏈觀測器低通濾波器的改進[J].中國電機工程學報,2008,28(18):61-65.
[7] 李彪,李黎川.新型磁鏈觀測算法及其在永磁同步電機無位置傳感器控制中的應用[J].西安交通大學學報,2015,49(11):102-109.
[8] 李紅,羅裕,韓邦成,等.帶通濾波器法電壓積分型定子磁鏈觀測器[J].電機與控制學報,2013,17(9):8-16.
[9] 王子輝.永磁同步電機全速度范圍無位置傳感器控制策略研究[D].杭州:浙江大學,2012.
[10]WANGZihui,LUKaiyuan.FredeBlaabjeg.Asimplestartupstrategybasedoncurrentregulationforback-EMFbasedsensorlesscontrolofPMSM[J].IEEETransactionsonPowerElectronics,2012,27(8):3817- 3824.