兩輪自平衡遙控植保車的研發(fā)
2017-04-22 12:02:11史云天吳光華
農(nóng)業(yè)工程技術(shù)·綜合版 2016年12期
關(guān)鍵詞:卡爾曼濾波
史云天+吳光華


摘要:該文主要是對(duì)農(nóng)業(yè)植保平衡車的研究。本系統(tǒng)主要分為兩部分,分別為無(wú)線收發(fā)部分和智能控制部分。智能控制部分主要是使得小車能夠穩(wěn)定的行走。首先對(duì)卡爾曼濾波進(jìn)行研究,調(diào)節(jié)參數(shù),使得電機(jī)轉(zhuǎn)動(dòng)穩(wěn)定,在進(jìn)行調(diào)節(jié)直立環(huán)pid,小車能夠直立行走,再進(jìn)行速度環(huán)的參數(shù)調(diào)節(jié)和硬件調(diào)試,小車能夠穩(wěn)定的站立和行走。轉(zhuǎn)彎閉環(huán)調(diào)節(jié),能夠使得轉(zhuǎn)彎時(shí)車身保持穩(wěn)定。無(wú)線接收部分主要是通過(guò)小車使用ppm調(diào)制方式,對(duì)小車進(jìn)行遠(yuǎn)距離控制盒調(diào)試,使得平衡車能夠直立前進(jìn)和后退行走,轉(zhuǎn)彎行走和急停控制。在車身的前端加上噴灑裝置,使得車子能夠噴灑農(nóng)藥作業(yè),車上會(huì)使用無(wú)線遙控,方便操作人員觀察前方的路況和觀察植保車的噴灑情況。
關(guān)鍵詞:馬農(nóng)業(yè)植保平衡車;卡爾曼濾波;pid;噴灑裝置
1 系統(tǒng)測(cè)量方案
系統(tǒng)主要有車體直立模塊、無(wú)線數(shù)據(jù)傳輸模塊、噴灑模塊、無(wú)線視頻模塊。車體直立模塊主要包括角度測(cè)量模塊、加速度測(cè)量模塊、電機(jī)驅(qū)動(dòng)模塊和主控制芯片模塊。無(wú)線傳輸數(shù)據(jù)模塊主要發(fā)送控制車身各種指令,對(duì)車身進(jìn)行操控。噴灑模塊進(jìn)行噴灑作業(yè),而無(wú)線遙控模塊方便操作人員進(jìn)行道路的觀察。
1.1 車身直立原理
卡爾曼濾波是采用信號(hào)與噪聲的狀態(tài)空間模型[1],利用前一時(shí)刻的估計(jì)值和現(xiàn)時(shí)刻的觀測(cè)值來(lái)更新對(duì)狀態(tài)變量的估計(jì),求出現(xiàn)時(shí)刻的估計(jì)值。實(shí)質(zhì)是由量測(cè)值重構(gòu)系統(tǒng)的狀態(tài)向量。它以“預(yù)測(cè)—實(shí)測(cè)—修正”的順序遞推,根據(jù)系統(tǒng)的量測(cè)值來(lái)消除隨機(jī)干擾,再現(xiàn)系統(tǒng)的狀態(tài),或根據(jù)系統(tǒng)的量測(cè)值從被噪聲干擾的系統(tǒng)中恢復(fù)系統(tǒng)的本來(lái)面目。PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容[2]。它是根據(jù)被控過(guò)程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。
1.2 角度采集模塊
由圖1知道,enc-03供電電壓為3.3 v,為4腳芯片,分別為Vcc,GND,Vref,Out。此傳感器通過(guò)lm358將信號(hào)進(jìn)行放大,最后得到角度值。測(cè)量范圍在0-180°之間,我們規(guī)定基準(zhǔn)職位90°。
1.3 加速度傳感器
加速度傳感器我們采用的MMA7260,需要3.3 v的供電電壓,采用3軸加速度傳感器主要是為角度傳感器進(jìn)行校正,我們使用Z軸為方向軸,采集數(shù)據(jù)范圍為正負(fù)90°。輸出量為模擬量,通過(guò)單片機(jī)的ad功能進(jìn)行采集。如圖2所示為加速度傳感器電路[3]。
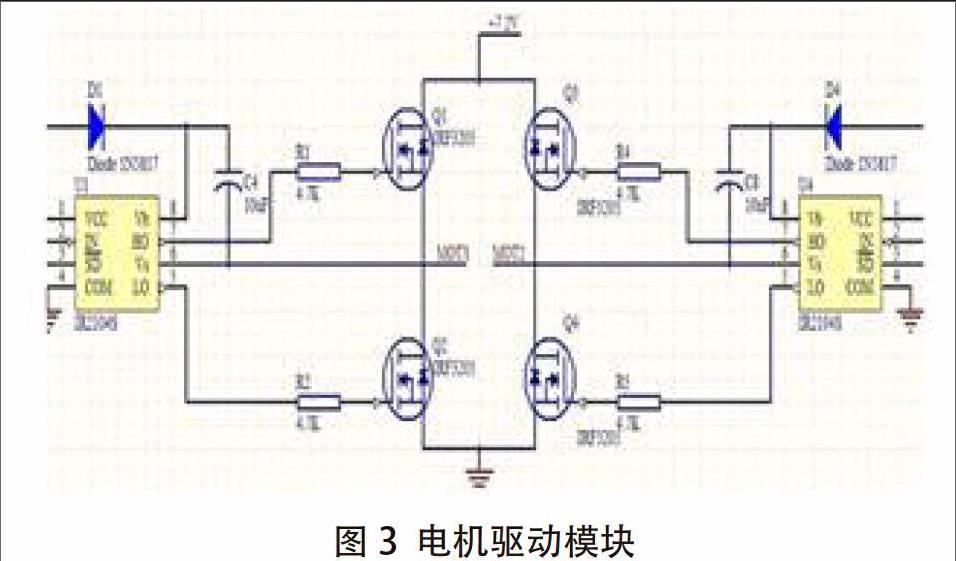
1.4 電機(jī)驅(qū)動(dòng)電路
電機(jī)驅(qū)動(dòng)電路的電源可以直接使用電池兩端的電壓。模型車在啟動(dòng)過(guò)程中往往會(huì)產(chǎn)生很大的沖擊電流,一方面會(huì)對(duì)其它電路造成電磁干擾;另一方面由于電池內(nèi)阻造成電池兩端的電壓下降,甚至?xí)陀诜€(wěn)壓電路所需要的最低電壓值,產(chǎn)生單片機(jī)復(fù)位現(xiàn)象[4]。為了克服啟動(dòng)沖擊電流的影響,可以在電源中增加容值較大的電解濾波電容,也可以采用緩啟動(dòng)的方式控制電機(jī)[5]。在啟動(dòng)時(shí),驅(qū)動(dòng)電路輸出電壓有一個(gè)漸變工程,使得電機(jī)啟動(dòng)速度略為降低從而減小啟動(dòng)沖擊電流的幅度。
1.5 農(nóng)藥噴灑桿
此車主要用于農(nóng)藥噴灑和農(nóng)田灌溉,用多個(gè)噴灑頭能夠增加噴灑面積,減少噴灑次數(shù)。噴灑使用的是高壓力噴頭,在噴灑效果和效果方面增加了許多。
2 直立車算法
兩輪自平衡遙控植保車不僅需要外部的各項(xiàng)驅(qū)動(dòng),同時(shí)也需要相應(yīng)的算法來(lái)支持平衡車進(jìn)行平衡調(diào)節(jié)[6],采用的卡爾曼濾波pid調(diào)節(jié),使得車模能夠很好的直立行走和完成各種指令動(dòng)作。
2.1 卡爾曼濾波
卡爾曼濾波是以最小均方誤差為估計(jì)的最佳準(zhǔn)則,來(lái)尋求一套遞推估計(jì)的算法,其基本思想是:采用信號(hào)與噪聲的狀態(tài)空間模型,利用前一時(shí)刻地估計(jì)值和現(xiàn)時(shí)刻的觀測(cè)值來(lái)更新對(duì)狀態(tài)變量的估計(jì),求出現(xiàn)時(shí)刻的估計(jì)值。實(shí)質(zhì)是由量測(cè)值重構(gòu)系統(tǒng)的狀態(tài)向量。它以“預(yù)測(cè)—實(shí)測(cè)—修正”的順序遞推,根據(jù)系統(tǒng)的量測(cè)值來(lái)消除隨機(jī)干擾,再現(xiàn)系統(tǒng)的狀態(tài),或根據(jù)系統(tǒng)的量測(cè)值從被噪聲干擾的系統(tǒng)中恢復(fù)系統(tǒng)的本來(lái)面目[7]。
2.2 PID控制
PID調(diào)節(jié)器是一種線性調(diào)節(jié)器,它將給定值r(t)與實(shí)際輸出值c(t)的偏差的比例(P)、積分(I)、微分(D)通過(guò)線性組合構(gòu)成控制量,對(duì)控制對(duì)象進(jìn)行控制。PID調(diào)節(jié)器各校正環(huán)節(jié)的作用比例環(huán)節(jié):即時(shí)成比例地反應(yīng)控制系統(tǒng)的偏差信號(hào)e(t),偏差一旦產(chǎn)生,調(diào)節(jié)器立即產(chǎn)生控制作用以減小偏差[8]。
積分環(huán)節(jié):主要用于消除靜差,提高系統(tǒng)的無(wú)差度。積分作用的強(qiáng)弱取決于積分時(shí)間常數(shù)TI,TI越大,積分作用越弱,反之則越強(qiáng)。
微分環(huán)節(jié):能反應(yīng)偏差信號(hào)的變化趨勢(shì)(變化速率),并能在偏差信號(hào)的值變得太大之前,在系統(tǒng)中引入一個(gè)有效的早期修正信號(hào),從而加快系統(tǒng)的動(dòng)作速度,減小調(diào)節(jié)時(shí)間。
2.3 采樣時(shí)間對(duì)系統(tǒng)的影響
采樣周期越小,數(shù)字模擬越精確,控制效果越接近連續(xù)控制。對(duì)大多數(shù)算法,縮短采樣周期可使控制回路性能改善,但采樣周期縮短時(shí),頻繁的采樣必然會(huì)占用較多的計(jì)算工作時(shí)間,同時(shí)也會(huì)增加計(jì)算機(jī)的計(jì)算負(fù)擔(dān)。而對(duì)有些變化緩慢的受控對(duì)象無(wú)需很高的采樣頻率即可滿意地進(jìn)行跟蹤,過(guò)多的采樣反而沒(méi)有多少實(shí)際意義。最大采樣周期根據(jù)耐奎斯特采樣定理可知[9]。
3 直立車程序
直力車的程序包括電機(jī)轉(zhuǎn)動(dòng)的控制,角度傳感器采集程序[10],加速度采集的程序,卡爾曼濾波的程序,PID調(diào)節(jié)的程序等,將這些程序綜合起來(lái)使得小車能夠直立行走。
3.1 采集程序
此部分程序主要是進(jìn)行加速度傳感器和角度傳感器的數(shù)據(jù)采集,選通兩路AD端口,采集回來(lái)的值通過(guò)相應(yīng)的公式計(jì)算出對(duì)應(yīng)的數(shù)量。
void Ad_data_proc(void)
{
int i;
Acc_z_data=0;
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36