基于無人機傾斜攝影技術測繪大比例尺地形圖的可行性研究
2017-03-25 10:33:26孫亮夏永華
價值工程 2017年8期
關鍵詞:無人機
孫亮++夏永華

摘要: 隨著無人機技術的發展,無人機傾斜攝影技術在數字城市建設和應急救災中得到了廣泛的應用。本文提出了一種基于無人機傾斜攝影技術所獲得的數字三維模型測繪大比例尺地形圖的方法,探討了傾斜攝影的關鍵技術,總結了基于無人機傾斜攝影生產三維模型和測繪地形圖的流程,實例驗證了基于無人機傾斜攝影測量生成的三維模型測繪大比例尺地形圖的可行性,并且做了相應的精度分析,在實際生產中有一定的指導意義。
Abstract: With the development of UAV technology, UAV oblique photography technology has been widely used in digital city construction and emergency relief. This paper presents a method of mapping large-scale topographic maps based on digital three-dimensional model obtained by oblique photography of UAV, discusses the key techniques of oblique photography, summarizes the process of producing 3D model and mapping topographic map based on UAV oblique photography, verifies the feasibility of large-scale topographic mapping based on 3D model generated by oblique photogrammetry of UAV, and makes the corresponding precision analysis, and in practical production it has certain guiding significance.
關鍵詞: 無人機;傾斜攝影測量;大比例尺地形圖;Smart3D;精度分析
Key words: UAV;oblique photogrammetry;large-scale topographic map;Smart3D;accuracy analysis
中圖分類號:P231.5 文獻標識碼:A 文章編號:1006-4311(2017)08-0209-04
0 引言
隨著我國經濟的日益發展,數字化城市的建設步伐日益加快,各領域都離不開空間地理信息的支持,尤其對大比例尺地形圖的快速獲取和更新有著迫切的需求。傳統測繪地形圖的方法普遍存在著作業效率低、出圖時間長、成本高的缺點,需要外業工作人員到實地作業,沒有安全保障的缺點。基于衛星遙感攝影測量測繪地形圖受到氣象、地貌條件的限制[1]。目前已經發射的高分辨率衛星影像分辨率已經達到了約0.5m,但是仍然難以滿足1:500-1:2000這種大比例尺的成圖要求。此外,傳統航空攝影測量測繪地形圖,對空域、機場和天氣條件有著嚴格的要求,存在著成本高,作業周期長的缺點,限制了數字攝影測量技術在大比例尺地形測繪中應用[2]。
隨著無人機技術的發展,無人機垂直攝影技術和傾斜攝影技術得到了廣泛的應用。與無人機垂直攝影相比,無人機傾斜攝影技術可以獲得多角度高分率影像,可生成數字三維模型,在數字城市建設、城市管理和應急救災中得到了廣泛的應用[3-5]。經過數據處理得到的數字三維模型是可量測的,可直接在三維模型上進行量測地形圖。與傳統垂直攝影技術相比,避免了戴立體觀測眼鏡進行測圖的方法。在小范圍測圖時,具有一定的實際應用價值和意義。
1 傾斜攝影原理
無人機傾斜攝影技術是通過在無人機飛行平臺上搭載多臺數碼相機,同時從垂直和傾斜多個不同的角度采集高分辨率影像,一般常用的是五鏡頭傾斜攝影系統,結合無人飛行平臺搭載的GPS/IMU系統獲取的POS數據和像控點數據,經過相關軟件處理獲取數字表面模型、數字正攝影像和三維模型的攝影測量技術。
2 無人機傾斜攝影測量關鍵技術
2.1 多視影像聯合平差
無人機傾斜攝影采集到的影像包含垂直攝影影像和傾斜攝影影像。針對傾斜攝影測量,目前傾斜影像區域網平差主要分為:無約束區域網平差、附加約束的區域網平差和傾斜影像的直接定向。
2.2 多視影像密集匹配
與傳統的垂直攝影影像相比,傾斜影像具有地物幾何變形大、分辨率變化大的問題[6]。使傳統的基于灰度和特征的匹配方法不能更好的完成匹配工作,難以獲取建模需要的同名點,為了更好的解決傾斜攝影的匹配問題,一些專家學者提出了基于多視角傾斜影像的密集匹配技術,并做了大量的研究[7-10],通過傾斜影像的密集匹配,可以得到高精度和高密度的點云數據,是實現精細三維建模的關鍵流程。目前,常用的密集匹配算法有共線條件約束的多片最小二乘影像匹配算法、多基元多影像匹配算法、基于物方的多視立體匹配算法[11]。
2.3 三維模型生產
將傾斜攝影獲取的影像經過預處理后,便可以進行三維模型的生產。基于傾斜攝影所得影像數據的利用方式可以將所得到的三維模型分為兩種方式:單獨利用傾斜像片作為紋理生產的三維模型和完全基于傾斜攝影所得數據并利用相關軟件獲得的三維模型。
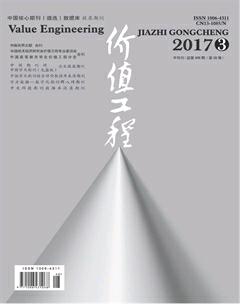
3 基于傾斜攝影生成三維模型測繪地形圖的流程
基于無人機傾斜攝影生成三維模型測繪地形圖主要包括:任務下達與申請空域、外業航飛數據采集、像控點布設與量測、內業空中三角測量、生成三維模型和制作地形圖幾個部分,具體技術流程見圖1所示。
4 實驗數據獲取
4.1 測區概況
實驗測區位于云南省安寧市,安寧市地處昆明西郊,距離昆明主城區28km。位于東經102°8′-102°37′和北緯24°31′-25°6′之間。安寧地形呈東南高、西北低,有八街、連然、祿脿3個山間盆地,其余為山區半山區。市內最高點海拔2617.7m,最低點海拔1680m。
4.2 外業數據獲取
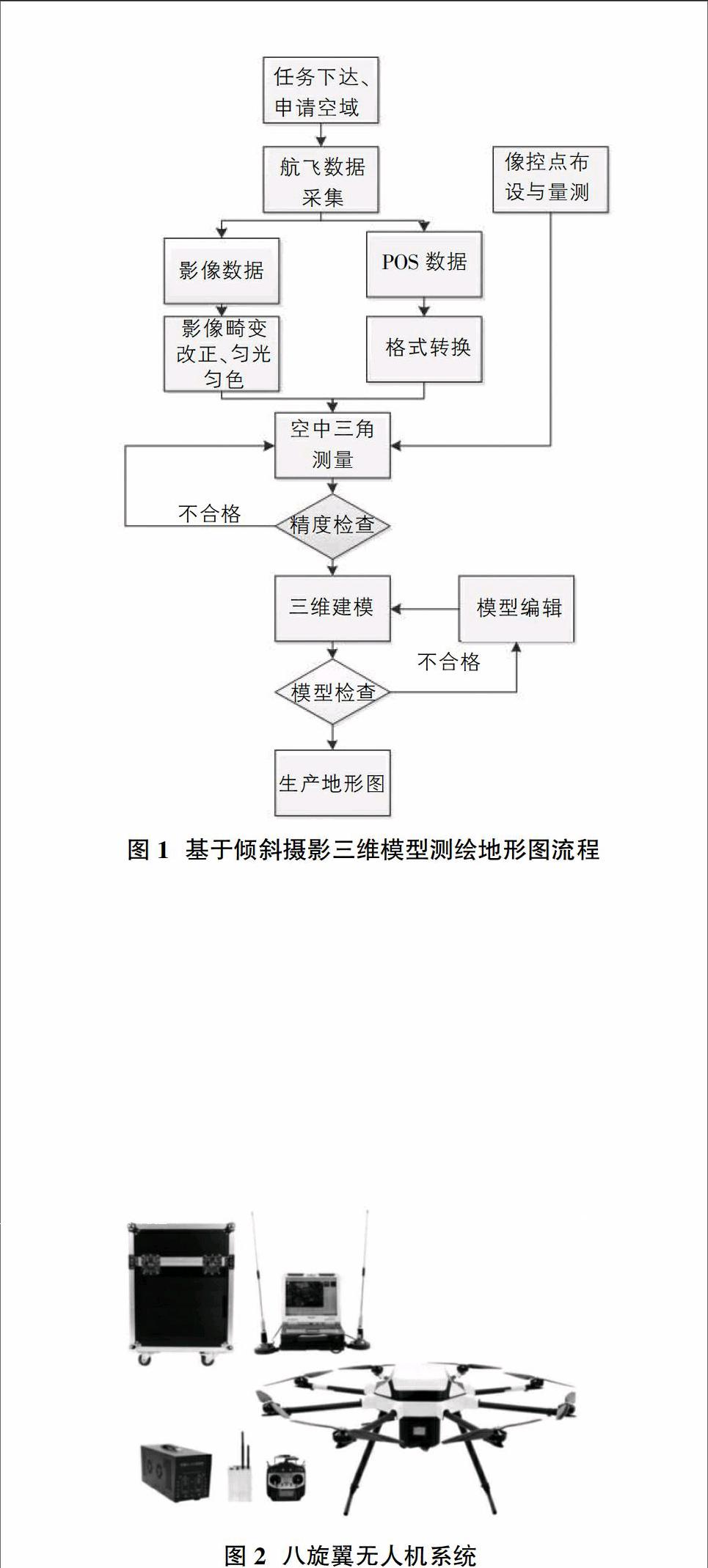
本次實驗采用八旋翼型無人機系統,主要包括八旋翼型無人機飛行平臺、地面監控站、五鏡頭傾斜相機和遙控設備,系統構成如圖2所示。八旋翼飛行平臺主要有動力系統、機身主體、飛行控制系統和一些輔助設備組成。該機型搭載3塊鋰電池,具有續航時間長,姿態穩的特點。
本次試驗外業航飛數據采集一共飛行了一個架次,規劃了8條航帶,相對航高設計為280m,航向重疊度為75%,旁向重疊度為75%,五個鏡頭一共拍攝了465張照片。
4.3 內業數據處理
在外業航飛結束后,進行內業數據處理,無人機傾斜攝影數據內業處理主要包括數據預處理、空中三角測量和生成三維模型幾步。
4.3.1 數據預處理
在得到航飛數據后,首先檢查影像和POS是否一一對應,然后檢查影像質量問題,是否清晰,有無大范圍的模糊遮擋現象。由于傾斜攝影相機有一個鏡頭垂直朝下,另四個分別向四個方向。在攝影的過程中,5個相機所拍攝的角度和時間不一致,就會出現光線反差、強度等的差異,將影響到三維建模的精度和效果,所以需要對影像進行勻光勻色處理[12]。最后,所獲得的POS數據一般是WGS84坐標系,需要根據項目需求,進行坐標系的轉換工作。
4.3.2 空中三測量
Smart3DCapture首先對一個垂直鏡頭和四個傾斜鏡頭所得到的影像進行連接點自動匹配,對獲取的特征點采用多像密集匹配技術自動匹配同名點,然后進行粗點檢測,構建自由網,輸入像控點坐標,進行刺點后進行光束法區域網平差,根據平差結果進行反復調整,包括參數設置、像控點刺點位置調整,直到空三結果滿足所需要求,最后輸出空三結果報告,實現傾斜攝影影像的空三解算。在Smart3DCapture中具體的操作流程如下:
①POS數據準備: 無人機航飛采集后獲得POS數據,針對無人機采集的POS數據不精確,在Smart3DCapture建模中一般只采用GPS數據作為初始值。在建模任務開始前,需要將POS數據整理成為Smart3DCapture能認可的格式。
②打開Smart3DCapture Master,創建一個新工程,在新建工程內建立一個塊,將上步已經準備好的POS表格加載到工程中,加載完成后,視圖中間偏右位置 3D View可以查看到空間效果。由于無人機POS 數據一般只使用GPS坐標值,不使用姿態角數據,故顯示為黃色點,可以通過預覽圖對飛行的質量進行初步的判斷。
③相對空三解算,Smart3DCapture Master在沒有添加像控點或沒有像控點就可以進行空三解算,自動匹配同名點,恢復像片之間的相對位置關系,經過相對空三解算后,可以預測像控點位置,可以很大程度上提高像控點刺點效率。
④量測控制點,選擇Control points菜單編輯控制點,在控制點的編輯過程中,先選擇成果所需的空間參考,輸入控制點信息,并在每個控制點下添加對應的影像并標注控制點所在具體位置,保存控制點信息。
⑤刺像控點,對照外業像控點點志記,將像控點刺在精確的位置。為了方便快速刺好像控點,可以先刺部分測區四周幾個像控點,然后進行空三解算,在此基礎上,可以更好的預測其余像控點的位置,進一步提高像控點刺點效率。
⑥絕對空三解算, 在刺好所有像控點后,進行絕對空三處理,在General 菜單下提交“空三”,提交后彈出“空三”定義窗口,設置塊輸出名稱及位置參考等信息便可提交運行。提交完成后,會自動計算,計算過程中不能進行任何操作。運行結束后,可通過3D View菜單查看形成的“空三”關系模型,包括相機曝光點的位置信息等,見圖3所示。
4.3.3 三維模型生成
在空三精度達到所滿足的精度和查看空三關系模型無明顯錯誤后,可以進行計算三維模型,點擊提交計算三維模型,設置模型的空間參考系統。Smart3DCapture系統的三維重建過程是基于瓦片技術,根據數據的大小進行分瓦,一般選擇規則平面方格分瓦,分瓦大小要保證最大瓦片的紋理不超過100Mpixls。然后提交工程,設置名稱,選擇所需數據產品,可單獨生成三維模型、三維點云和正射影像,根據需求進行選擇。選擇生成三維模型后可選擇3mx、s3c、osgb等格式的三維模型,提交工程,完成模型的生產,打開3D viewer 查看生成模型結果。
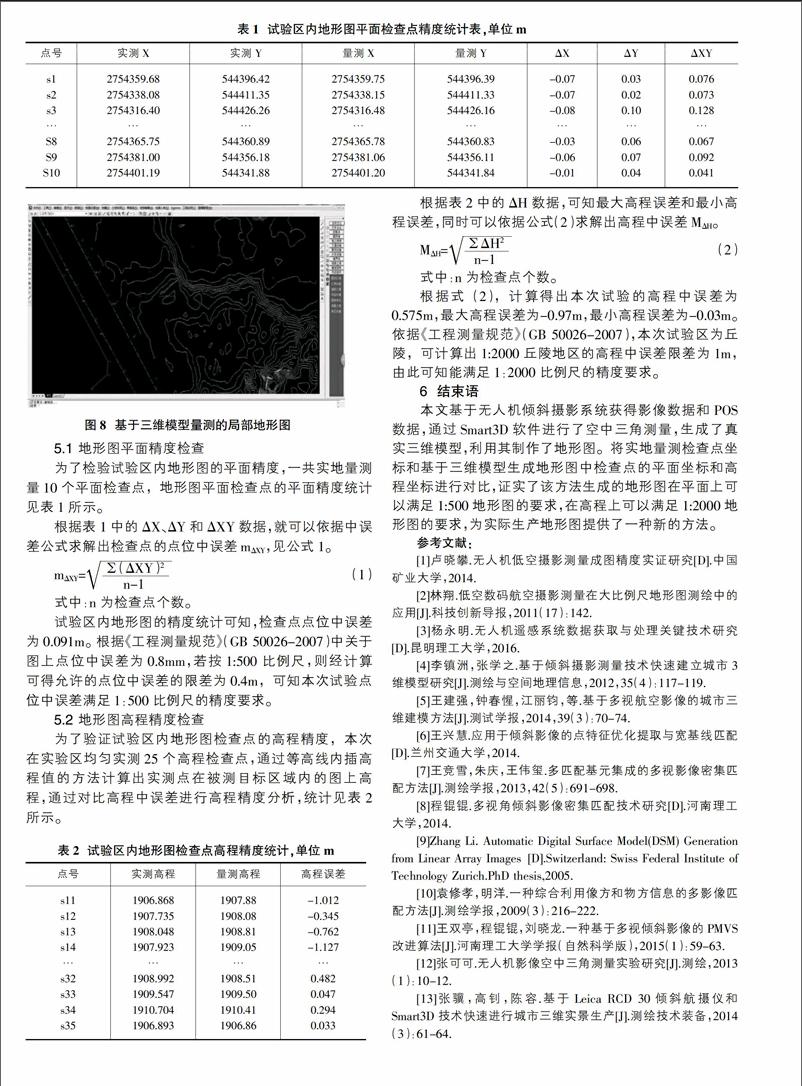
Smart3DCapure軟件基于圖形運算單元GPU的快速三維場景運算軟件,可運算生成基于真實影像的高密度點云[13],如圖4所示,根據點云數據可以自動生成不規則三角網(TIN)數據如圖5所示,生成的白膜如圖6所示,自動對白膜三維模型賦予紋理,生成基于真實影像紋理的實景三維模型,如圖7所示。
5 基于傾斜攝影測量三維模型的成圖精度分析
為了檢驗基于三維模型量測地形圖的可行性和精度,本次實驗在試驗區采用RTK技術均勻量測一些特征點,包括道路拐角、房角,墻角、井蓋,溝渠等可以快速識別的特征點,以這些實地量測的檢查點坐標作為已測地形圖的檢核點。在生成的三維模型上均勻取大量的地形地物點,將這些點導入CASS中成圖,見圖8所示。通過判斷檢查點點位中誤差和高程中誤差的大小是否滿足測繪大比例尺地形圖的規范要求,進行驗證基于三維模型量測地形圖的可行性和精度。
5.1 地形圖平面精度檢查
為了檢驗試驗區內地形圖的平面精度,一共實地量測量10個平面檢查點,地形圖平面檢查點的平面精度統計見表1所示。
根據表1中的?駐X、?駐Y和?駐XY數據,就可以依據中誤差公式求解出檢查點的點位中誤差m?駐XY,見公式1。
m?駐XY=■(1)
式中:n為檢查點個數。
試驗區內地形圖的精度統計可知,檢查點點位中誤差為0.091m。根據《工程測量規范》(GB 50026-2007)中關于圖上點位中誤差為0.8mm,若按1:500比例尺,則經計算可得允許的點位中誤差的限差為0.4m,可知本次試驗點位中誤差滿足1:500比例尺的精度要求。
5.2 地形圖高程精度檢查
為了驗證試驗區內地形圖檢查點的高程精度,本次在實驗區均勻實測25個高程檢查點,通過等高線內插高程值的方法計算出實測點在被測目標區域內的圖上高程,通過對比高程中誤差進行高程精度分析,統計見表2所示。
根據表2中的?駐H數據,可知最大高程誤差和最小高程誤差,同時可以依據公式(2)求解出高程中誤差M?駐H。
M?駐H=■(2)
式中:n為檢查點個數。
根據式(2),計算得出本次試驗的高程中誤差為0.575m,最大高程誤差為-0.97m,最小高程誤差為-0.03m。依據《工程測量規范》(GB 50026-2007),本次試驗區為丘陵,可計算出1:2000丘陵地區的高程中誤差限差為1m,由此可知能滿足1:2000比例尺的精度要求。
6 結束語
本文基于無人機傾斜攝影系統獲得影像數據和POS數據,通過Smart3D軟件進行了空中三角測量,生成了真實三維模型,利用其制作了地形圖。將實地量測檢查點坐標和基于三維模型生成地形圖中檢查點的平面坐標和高程坐標進行對比,證實了該方法生成的地形圖在平面上可以滿足1:500地形圖的要求,在高程上可以滿足1:2000地形圖的要求,為實際生產地形圖提供了一種新的方法。
參考文獻:
[1]盧曉攀.無人機低空攝影測量成圖精度實證研究[D].中國礦業大學,2014.
[2]林翔.低空數碼航空攝影測量在大比例尺地形圖測繪中的應用[J].科技創新導報,2011(17):142.
[3]楊永明.無人機遙感系統數據獲取與處理關鍵技術研究[D].昆明理工大學,2016.
[4]李鎮洲,張學之.基于傾斜攝影測量技術快速建立城市3維模型研究[J].測繪與空間地理信息,2012,35(4):117-119.
[5]王建強,鐘春惺,江麗鈞,等.基于多視航空影像的城市三維建模方法[J].測試學報,2014,39(3):70-74.
[6]王興慧.應用于傾斜影像的點特征優化提取與寬基線匹配[D].蘭州交通大學,2014.
[7]王競雪,朱慶,王偉璽.多匹配基元集成的多視影像密集匹配方法[J].測繪學報,2013,42(5):691-698.
[8]程錕錕.多視角傾斜影像密集匹配技術研究[D].河南理工大學,2014.
[9]Zhang Li. Automatic Digital Surface Model(DSM) Generation from Linear Array Images[D].Switzerland: Swiss Federal Institute of Technology Zurich.PhD thesis,2005.
[10]袁修孝,明洋.一種綜合利用像方和物方信息的多影像匹配方法[J].測繪學報,2009(3):216-222.
[11]王雙亭,程錕錕,劉曉龍.一種基于多視傾斜影像的PMVS改進算法[J].河南理工大學學報(自然科學版),2015(1):59-63.
[12]張可可.無人機影像空中三角測量實驗研究[J].測繪,2013(1):10-12.
[13]張驥,高釗,陳容.基于Leica RCD 30傾斜航攝儀和Smart3D技術快速進行城市三維實景生產[J].測繪技術裝備,2014(3):61-64.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26