混合動力公交車駕駛員駕駛特性辨識算法
2017-03-08 08:32:32朱道偉
軍事交通學院學報 2017年2期
嚴 英,朱道偉,葉 鵬,楊 鋼
(1.天津職業(yè)技術師范大學,天津300222; 2.軍事交通學院 軍用車輛系,天津300161;3.軍事交通學院 科研部,天津300161)
● 車輛工程 Vehicle Engineering
混合動力公交車駕駛員駕駛特性辨識算法
嚴 英1,朱道偉2,葉 鵬3,楊 鋼2
(1.天津職業(yè)技術師范大學,天津300222; 2.軍事交通學院 軍用車輛系,天津300161;3.軍事交通學院 科研部,天津300161)
針對混合動力公交車駕駛員駕駛特性與標準控制參數(shù)不匹配而導致車輛續(xù)駛里程降低的問題,研究同一道路工況下的駕駛員駕駛行為特征參數(shù)描述方法以及駕駛員駕駛特性辨識算法。通過提取時域場中與能耗相關的特征變量,構建基于高斯混合模型(GMM)算法的駕駛員駕駛特性辨識模型。結果表明:踏板開度的倒頻譜信號比時域信號更能反映駕駛員的駕駛傾向;基于特征變量的時頻域信號,并結合線路運行特征優(yōu)化模型參數(shù),最終模型辨識精度高于93%。
混合動力公交車;駕駛特征;高斯混合模型;駕駛員辨識
推廣混合動力公交車是緩解能源危機和減少環(huán)境污染的有效途徑之一。但在混合動力公交車實際運行中,即使在同一運營線路上,同一車隊的混合動力公交車能耗差異也很大。相關研究指出,駕駛員行為對電動汽車能耗有重要影響,即使在相同的路況下,不同駕駛員駕駛同一目標車輛,能耗差別仍高達30%。在電池技術沒有大突破的前提下,如果能識別駕駛員駕駛行為特性,并對不合理駕駛操作主動管理,可提供最大的能量優(yōu)化潛力[1]。文獻[2]指出在整個工況車輛平均車速相同的前提下,駕駛員對加速/制動踏板的操作差異會影響電動汽車的整體能耗表現(xiàn)。文獻[3—4]表明在車輛行駛過程中,基于踏板開度等相關信息區(qū)分駕駛員駕駛類型是可行的。此外,駕駛特性辨識能提高駕駛輔助系統(tǒng)(如自適應巡航系統(tǒng))的可靠性和駕駛舒適性[5]。
固定線路上的公交車駕駛員有著各自不同的駕駛習慣,構成該線路上的駕駛員駕駛特性樣本庫。駕駛特性辨識的目標,是給出當前駕駛員在已知駕駛特性樣本庫的類型,是混合動力控制策略自適應駕駛員駕駛習慣的前提。本文圍繞駕駛員駕駛行為特性展開研究,研究固定運營線路的混合動力公交車實時運行狀態(tài)下的駕駛員駕駛特性辨識算法,為進一步提高混合動力公交能量策略的適應性提供優(yōu)化方向。
1 樣本數(shù)據(jù)篩選
研究樣車為串聯(lián)混合動力公交車,運行路線站點多、平均車速慢,共選取5個樣本駕駛員,編號A—E。采用車載數(shù)據(jù)采集設備獲得車輛運行數(shù)據(jù)。
1.1 站點距離統(tǒng)計
研究對象運行線路全長16.8 km,包含26個公交站點和44個路口(含紅綠燈)。分析發(fā)現(xiàn),該公交線路平均啟停距離(站點和紅綠燈停車)為200 m,最長的運行間距為982 m,最小距離不足70 m。由于車輛駕駛員需按照公交車行車任務操作車輛,較長的運行間距數(shù)據(jù)樣本有利于體現(xiàn)其內(nèi)在的駕駛傾向[6]。
1.2 公交車運行時間分析
分析樣車運行時長情況,運行工況呈現(xiàn)出明顯的特點,可定義為擁堵期和通暢期。工作日的早晚高峰屬于擁堵期,工作日的7:00以前、19:00以后的時間以及休息日的10:00以前的時間段可歸為通暢期。公交線路運行時長情況見表1。

表1 運行時長匯總 s
從表1可知,擁堵期的運行時長比通暢期增加近1 000 s。道路交通擁堵時,駕駛員被迫依據(jù)交通情況頻繁操作車輛,其駕駛行為不能充分反映駕駛員的內(nèi)在駕駛習慣。基于該公交運行線路特點以及運行時長特征,應選取通暢期時段且運行片段里程長數(shù)據(jù)作為樣本數(shù)據(jù),樣本數(shù)據(jù)挑選原則見表2。
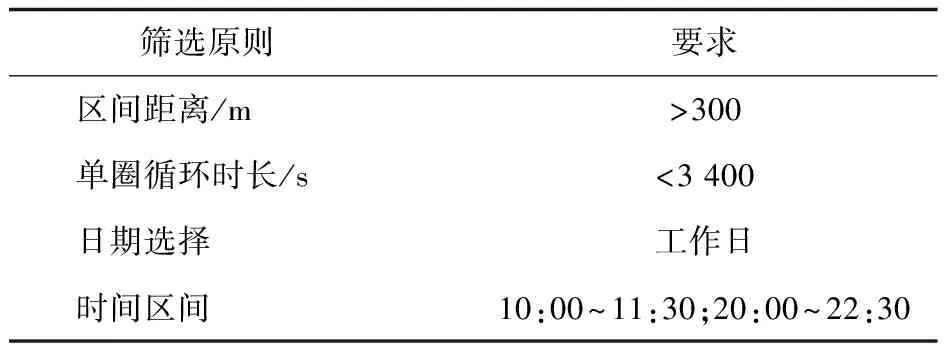
表2 數(shù)據(jù)樣本篩選準則
2 駕駛特性辨識
2.1 辨識窗口和周期
辨識窗口K和辨識周期P的取值對于最終辨識精度有直接影響。從前文分析可知,公交車單圈運行時長差別較大,但距離基本保持不變。因此,距離比時間更合適作為辨識窗口K的基本單位。進出站過程是公交車最典型的運行片段,包含了駕駛員的典型駕駛操作過程。因此,辨識窗口至少應包含進出站過程,其數(shù)值大小則應依據(jù)運行線路中的運行間距來進行調(diào)整。同理,辨識周期P同樣采用里程作為單位,表示駕駛員辨識算法的運行周期,決定了進入到辨識算法的新鮮數(shù)據(jù)量。可依據(jù)研究對象的站點間距分別情況選擇辨識窗口K和辨識周期P的初值[6-7],然后根據(jù)公交車行駛位置信息優(yōu)化參數(shù)數(shù)值(見表3)。
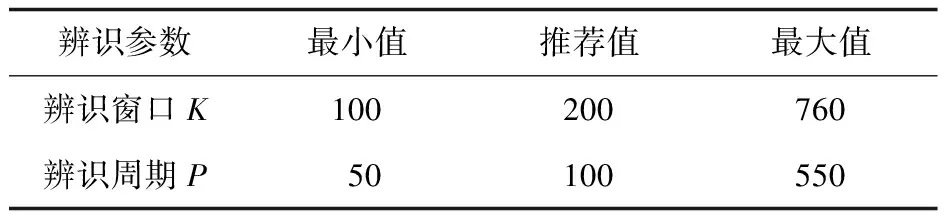
表3 辨識參數(shù)數(shù)據(jù)選擇 m
2.2 辨識模型
高斯混合模型(gassian mixture model,GMM)是一種基于概率密度分布的模型辨識方法。圖1所示為基于GMM進行駕駛員駕駛特性辨識的基本流程。待辨識對象是目標樣車的5位駕駛員。可從與駕駛員駕駛特性密切相關的參數(shù)原始信號中獲得駕駛員駕駛行為信號,并經(jīng)過特征信息提取后,進入到辨識階段。GMM子模型給出的是當前輸入信號屬于某一類型的概率。可通過設計判別準則來調(diào)整辨識精度。
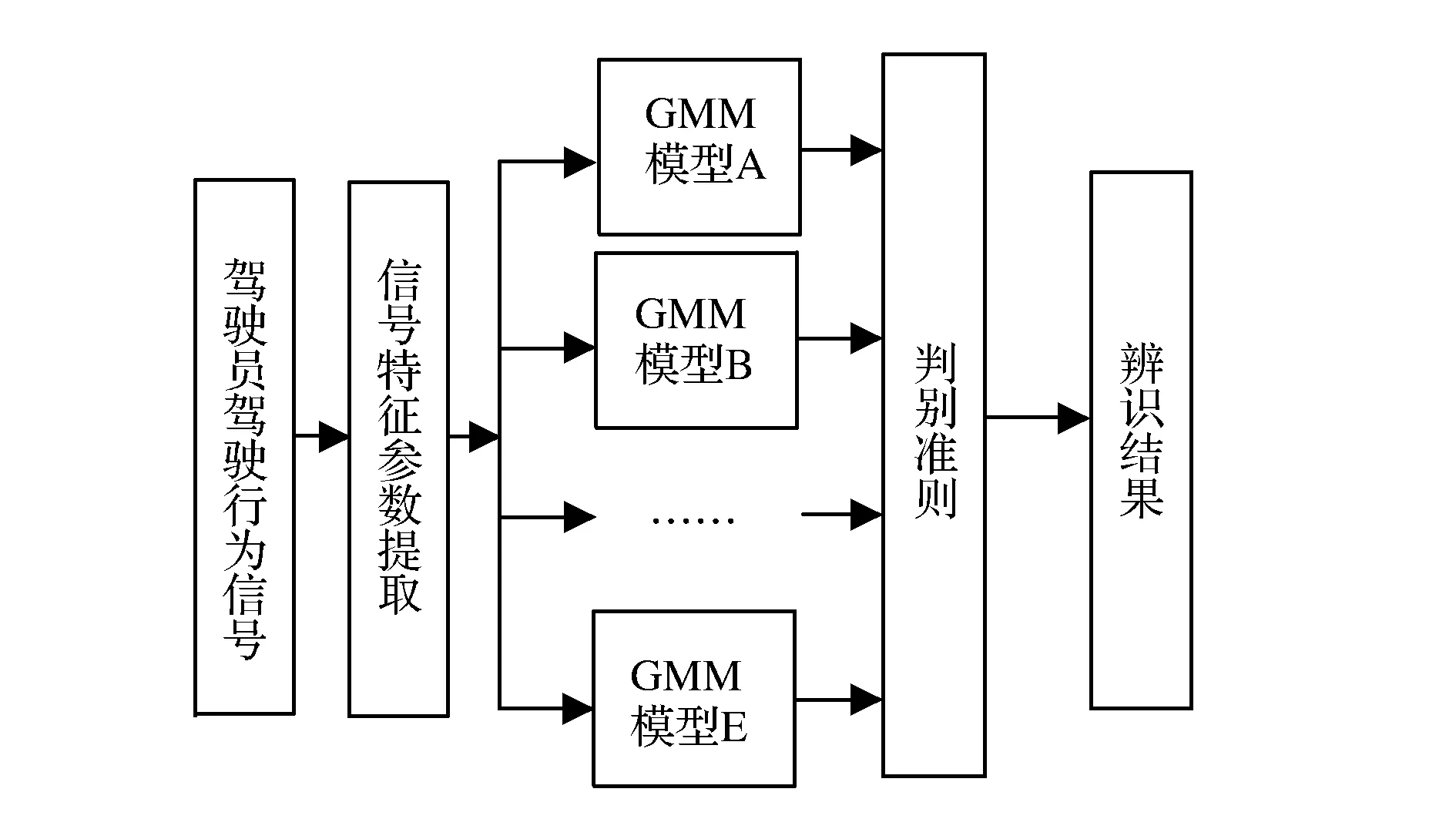
圖1 GMM辨識流程
本文設計的判別準則見式(1),當辨識結果對應某駕駛員的概率高于70%時就接受,低于40%則拒絕,否則采用概率最大的兩種類型按照比例權重混合接受,以保證辨識結果的連續(xù)性。
(1)
式中α為GMM子模型辨識輸出的匹配概率。
2.3 基于時域特征參數(shù)的辨識
在混合動力公交車行駛過程中,駕駛員主要通過操作加速/制動踏板(目標車輛無換擋配置)實施車輛控制。因此,能耗相關的駕駛特征蘊含在車輛行駛過程中,可從中提取特征參數(shù)作為辨識算法的輸入信息(制動踏板信號處理為負的加速踏板信號),共17個時域參數(shù),部分參數(shù)見表4。
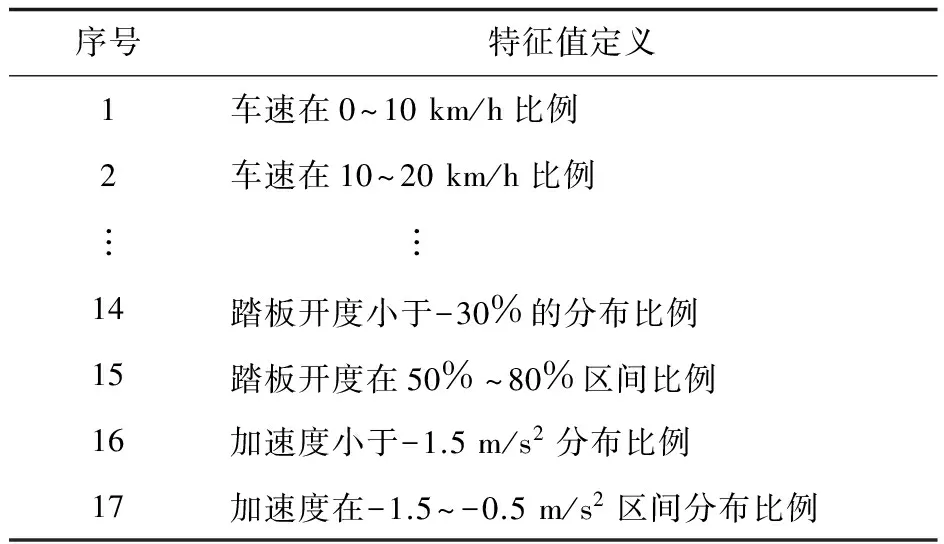
表4 辨識模型時域輸入?yún)?shù)
將研究對象16.7 km線路運行區(qū)間分為100個訓練樣本和60個測試樣本,對5位駕駛員進行辨識(結果見表5)。從表5可以看出,GMM對5位駕駛員的接受準確率平均到達90%,拒絕準確率高于93%,較好地實現(xiàn)了駕駛員駕駛特性辨識。
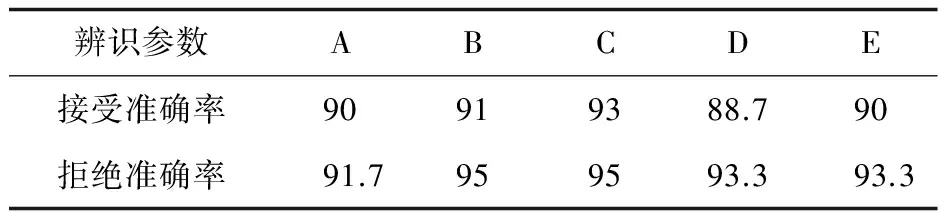
表5 17個時域特征參數(shù)辨識結果 %
2.4 基于頻域特征參數(shù)的辨識
在所選的數(shù)據(jù)樣本中(道路情況良好),駕駛員的內(nèi)在駕駛習慣是其調(diào)整踏板的主要原因。圖2所示為駕駛員A和E各自2次出站過程中踏板時域與倒頻譜信號。兩位駕駛員的踏板時域信號均波動較大,一致性較差,而相應的倒頻譜信號收斂一致性較好。駕駛員E的倒頻譜信號整體波動較小,信號在第9 s時變?yōu)樨撝担获{駛員A的倒頻譜信號則是迅速衰減。由此可見,在道路情況良好的前提下,即使是同一個駕駛員的出站操作,相對于變化差異較大的踏板時域信號,其倒頻譜信號波動差異較小。辨識模型輸入?yún)?shù)數(shù)據(jù)范圍變化太大,會導致模型訓練過程較長,且辨識精度和泛化能力下降。因此,應從駕駛員操作特征參數(shù)的倒頻譜信號中進一步提取辨識參數(shù)。
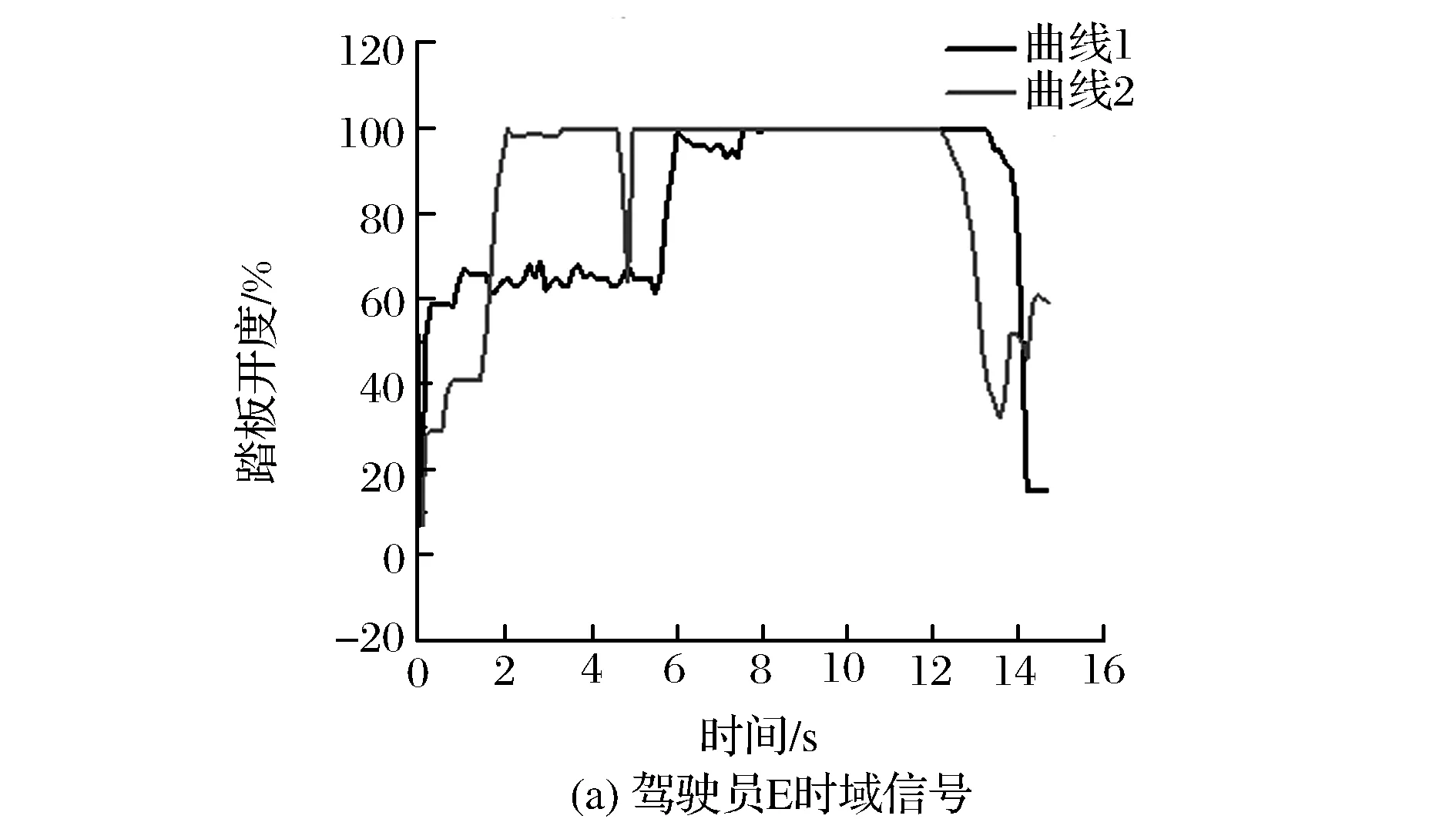
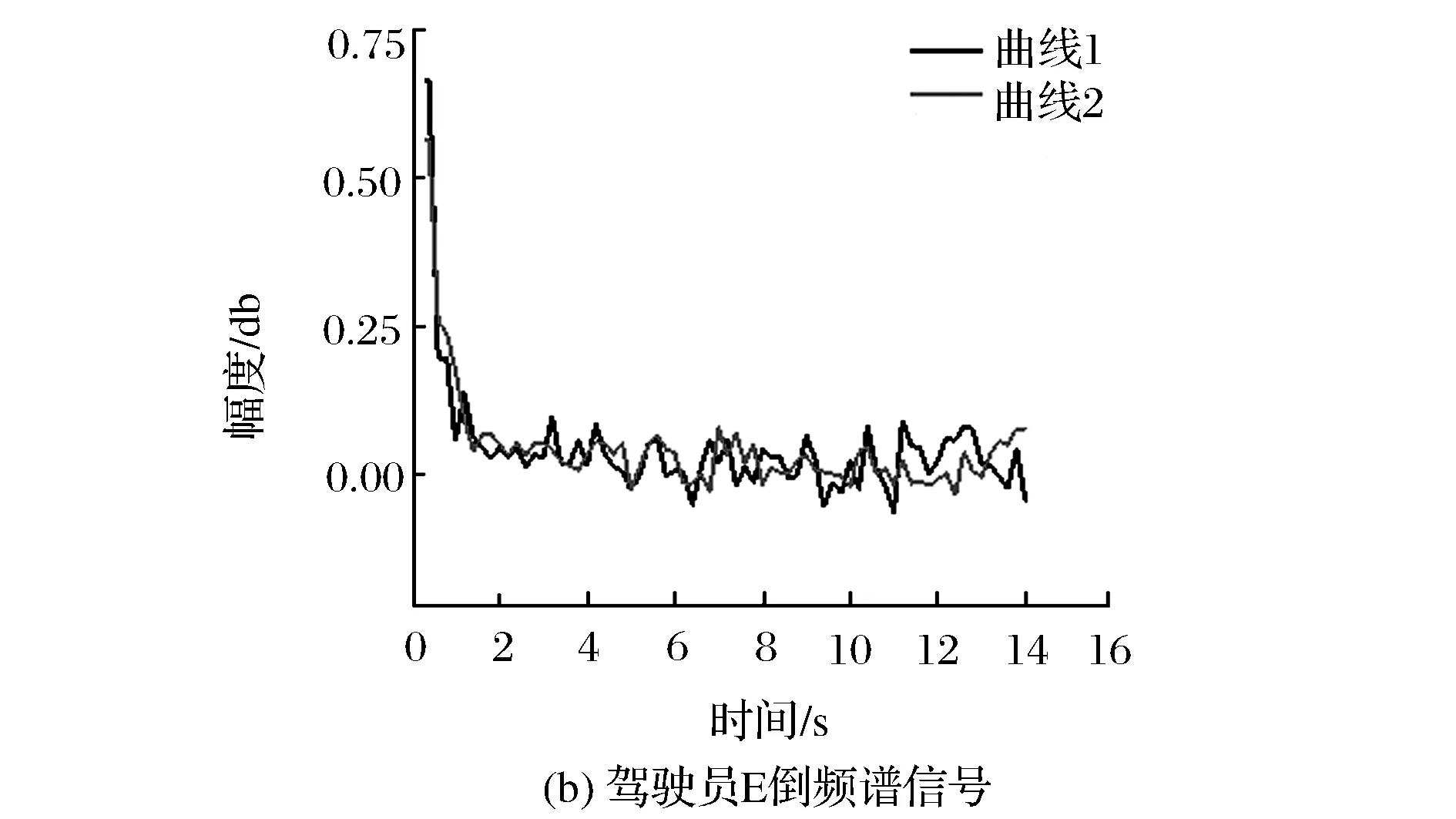
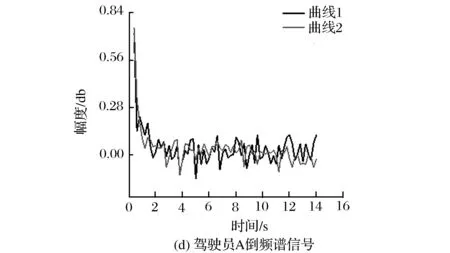
圖3 出站過程踏板時域及倒頻譜信號
從踏板倒頻譜信號選取的特征變量見表6。定義參數(shù)截止時刻F表示當前積分面積占總面積90%的采樣時間值。
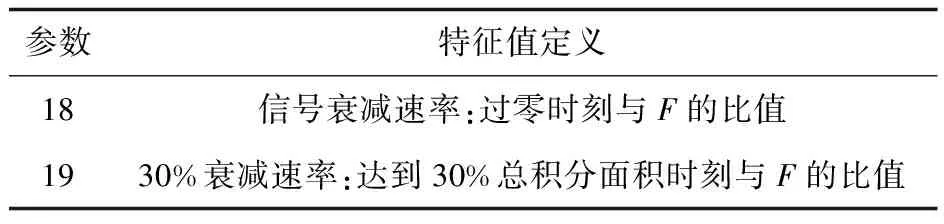
表6 倒頻譜信號特征量
增加表6中的倒頻譜參數(shù)到辨識模型中,重新訓練GMM辨識模型,結果見表7。
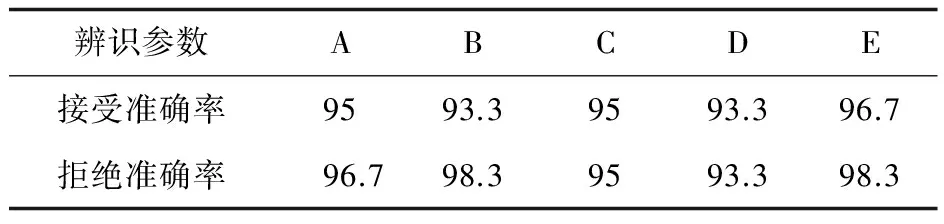
表7 倒頻譜辨識精度 %
從表7可以看出,增加了倒頻譜信號的模型辨識精度得到了提升,尤其是平均拒絕準確率高于95%,辨識精度可以滿足后續(xù)控制策略設計的需求。
3 結 語
駕駛員駕駛行為對混合動力公交車實際運行能耗有重要影響。本文針對固定線路下混合動力公交車駕駛員駕駛特性辨識算法展開研究。研究表明,在公交車運行工況中,踏板以及車輛速度等特征變量的統(tǒng)計分布狀況反映了駕駛員內(nèi)在的駕駛特性。同一駕駛員的踏板開度倒頻譜信號比時域信號收斂性更好,有利于降低辨識模型的運算量。基于特征變量的時頻域信號構建了GMM駕駛員特性辨識模型,并結合道路運行工況特征優(yōu)化模型參數(shù),最終實現(xiàn)了93%的辨識精度。
[1] BINGHAM C. Power energy storage technologies and energy management[C]//the 5th Advanced Engine Control Symposium, 2015: 131-138.
[2] CHENG C, MCGORDON A. A model to investigate the effects of driver behaviour on hybrid vehicle control[G]//The 26th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exposition.2014:421-427.
[3] MATTHEW G, BENJAMIN M. Factors affecting the fuel consumption of plug-in hybrid electric vehicles[G]//The 25th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exposition,2010:567-572.
[4] CHIYOMI Miyajima. Driver modeling based on driving behavior and its evaluation in driver identification[J].Proceedings of the IEEE, 2015,95(2):427-437.
[5] XU Guoqing, LIU Li, SONG Zhangjun, et al. Driver behavior analysis based on Bayesian network and multiple classifiers[J]. Intelligent Computing and Intelligent Systems, 2010:663-668.
[6] 嚴英.純電動公交客車加速踏板駕駛特性輔助優(yōu)化策略研究[D].天津:天津大學,2012.
[7] 朱道偉.基于道路工況遠程自學習的混合動力城市客車控制策略的動態(tài)優(yōu)化[J].機械工程學報,2010,46(6):33-37.
(編輯:張峰)
Identification Algorithm of Driving Behavior for Hybrid Bus Driver
YAN Ying1, ZHU Daowei2, YE Peng3, YANG Gang2
(1.Tianjin University of Technology and Education, Tianjin 300222, China;2.Military Vehicle Department, Military Transportation University, Tianjin 300161, China;3.Scientific Research Department, Military Transportation University, Tianjin 300161, China)
Considering the mismatch between driving behavior of hybrid bus driver and standard control parameter reduces driving range, the paper studies the description method of driving behavior characteristic parameter and identification algorithm of driving behavior in the same road condition. It establishes an identification model of driving behavior based on GMM (Gaussian mixture model) by extracting characteristic variable related to energy consumption in time domain. The result shows that the cepstrum signal of pedal can reflect drivers’ driving tendency rather than time domain signal, and the precision of the model can reach 93% by optimizing the model parameter according to the running characteristics based on time-frequency domain signal of characteristic variable.
hybrid bus; driving behavior; GMM (gaussian mixture model); driver identification
2016-10-13;
2016-11-17.
國家自然科學基金資助項目(51307119);天津市局級預研項目(KRKC011503).
嚴 英(1984—),男,博士,講師.
10.16807/j.cnki.12-1372/e.2017.02.011
U469.72
A
1674-2192(2017)02- 0044- 04
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
電子制作(2018年11期)2018-08-04 03:25:42
黃河之聲(2017年13期)2017-01-28 13:30:17
公民與法治(2016年4期)2016-05-17 04:09:26