三維力作用下人體立體剛體模型的太極拳力學(xué)分析
2016-11-19 08:23:34郭振興李恩杰
邯鄲學(xué)院學(xué)報 2016年2期
顧 杰,郭振興,李恩杰
(邯鄲學(xué)院 太極文化學(xué)院,河北 邯鄲 056005)
太極文化研究
三維力作用下人體立體剛體模型的太極拳力學(xué)分析
顧 杰,郭振興,李恩杰
(邯鄲學(xué)院 太極文化學(xué)院,河北 邯鄲 056005)
在平面模型的基礎(chǔ)上建立了人體立體剛體模型,對太極拳進(jìn)行了更加全面和更加深入的力學(xué)分析。平面模型雖然計算便捷,但只能討論平面運(yùn)動,難以對復(fù)雜動作進(jìn)行力學(xué)分析。太極拳是 “一動俱動,一靜俱靜”的人體運(yùn)動,人體是具有六個自由度的剛體,作用于人體上有三個方向的力和三個方向的力矩。只有立體模型才能對這個體系作完整的力學(xué)分析。立體模型簡括了人體的立體構(gòu)架、質(zhì)量、轉(zhuǎn)動慣量、速度、角速度、攻擊力、重力、地面反力、摩擦力等因素,并引入了深方向的維度,填補(bǔ)了平面剛體模型的不足。立體模型運(yùn)用更加精細(xì)的運(yùn)算,分析了轉(zhuǎn)腰胯、翻胯、旋胯、等復(fù)雜動作的力學(xué)原理;分析了順弓步與拗弓步的力學(xué)區(qū)別;分析了步寬對功架的力學(xué)影響;為規(guī)范太極拳動作及技術(shù)提供了更科學(xué)的方法和更充分的理論依據(jù)。
太極拳;人體立體剛體模型;力學(xué)分析
引 言
平面模型有一定的局限性,為此本文建立了立體模型,而能更準(zhǔn)確的應(yīng)用于太極拳的力學(xué)分析,得出了幾個重要結(jié)論和平面模型的結(jié)論相仿,但在量的運(yùn)算上更符合實際:即人體的重心要在支撐面內(nèi)以維持穩(wěn)定平衡;打滑和失根是導(dǎo)致失控的兩種臨界條件;在臨界條件內(nèi)人體平衡,超過任何一個臨界條件將最終導(dǎo)致人體不平衡;攻擊力來自腳底的摩擦力、正壓力、人體整體的動量和肢體相對運(yùn)動的動量;內(nèi)勁造就動量和傳遞力。 還通過數(shù)學(xué)計算,推導(dǎo)出太極拳套路訓(xùn)練和推手競技中保持平衡的臨界條件,可以用立體模型證明太極拳“發(fā)勁如放箭”、“引進(jìn)落空”、“牽動四兩撥千斤”等技術(shù)技巧的力學(xué)原理。太極拳屬于體育,是人的肢體運(yùn)動和本體反應(yīng);太極拳屬于武術(shù),是人的心理活動和對抗行動;太極拳蘊(yùn)含力學(xué)原理,是人體與人體、人體與大地的相互作用。運(yùn)用現(xiàn)代力學(xué)理論分析太極拳的技術(shù)動作,揭示太極拳的奧妙,探索一條運(yùn)用現(xiàn)代科技研究太極拳的途徑,對于促進(jìn)太極拳的科學(xué)化發(fā)展和國際化傳播具有很強(qiáng)的現(xiàn)實意義和深遠(yuǎn)意義。
一、順步人體立體剛體模型
根據(jù)力學(xué)分析的一般要求和用于分析太極拳的需要,采用隔離體分析。
把人體簡化為一個立體剛體,見圖 1。各肢體簡化成剛桿,剛桿的接點是剛性的,腳和地面的接觸處被簡化為點。剛體的質(zhì)量是m0,位于剛體的質(zhì)心。人體的質(zhì)心和重心重合。圖中

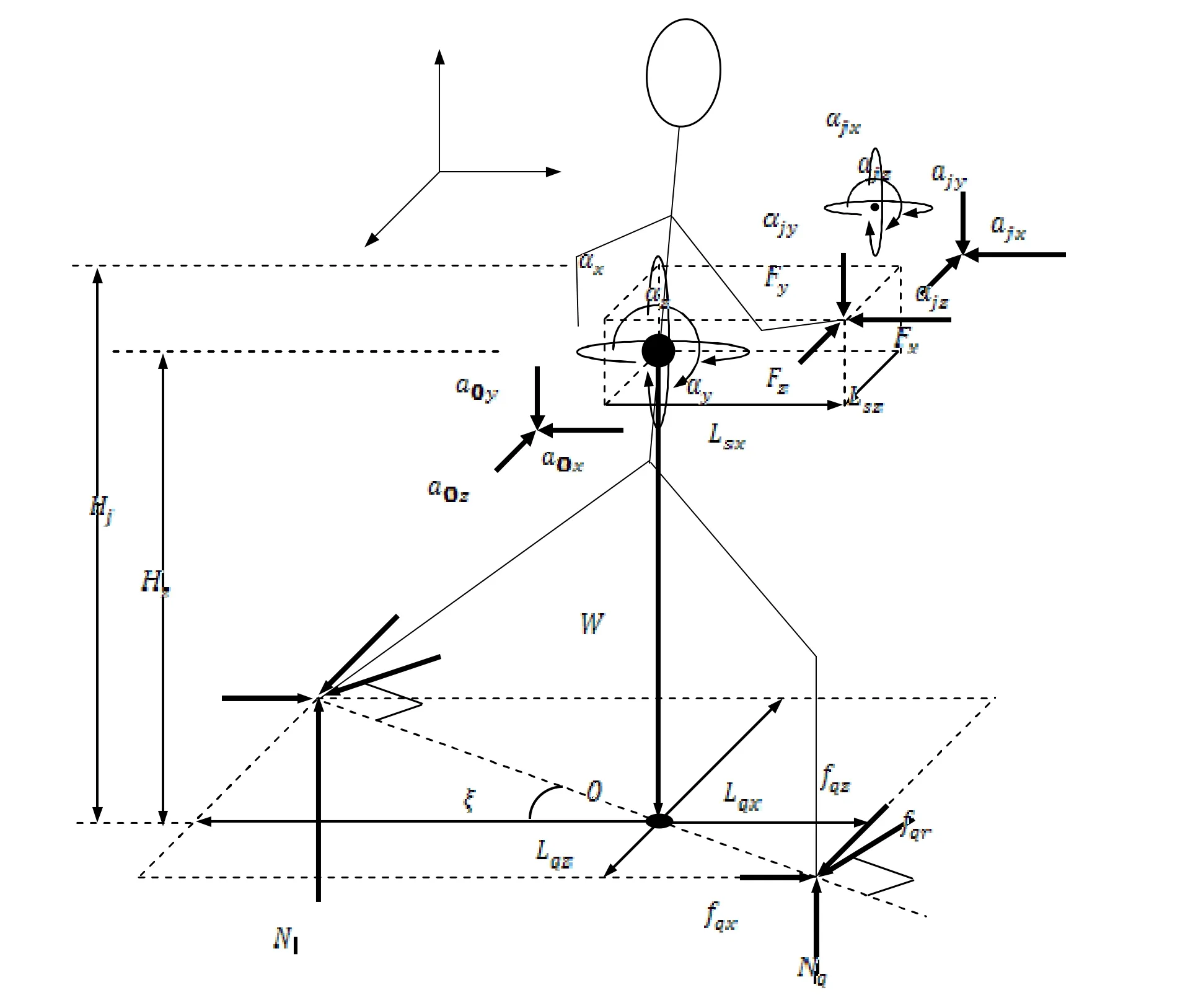
圖1 順步立體剛體模型
圖1的模型右腳在前,左腳在后,重心在兩腳的連線上。圖1中Lsz為正,表示手在重心的右方,所以圖1是順步模型。注意,平面模型[1][2]把人體簡化到一個平面,無法分別順步還是拗步。只有立體模型才能分析順步和拗步的異同。本節(jié)討論順步,后面要討論拗步,然后把這兩種情況在數(shù)學(xué)上統(tǒng)一表示。
圖中的人體以弓步為形象,但模型對其它步型如坐步、虛步及任何功架都適用。步型的選擇就是參數(shù)的選擇。比如,前腳距離Lqx小于后腳距離Lhx為弓步。前腳距離Lqx大于后腳距離Lhx則為坐步。前腳距離Lqx遠(yuǎn)大于后腳距離Lhx則可為虛步。功架的高低主要由兩腳的前后距離決定。功架的寬度由橫向距離Lqz和Lhz來決定,寬度的引入是立體模型和平面模型的關(guān)鍵不同之處。所以圖1的模型可以是順弓步,順坐步,順虛步,等等。
平面模型把人體限制在平面內(nèi),數(shù)學(xué)上假定在平面內(nèi)的剛度無限大。所以在討論面內(nèi)的運(yùn)動時,平面模型能得出合理的結(jié)論。如果有垂直于平面的外力和運(yùn)動時,平面模型就不太準(zhǔn)確。而立體模型在寬方向有客觀的度量,側(cè)向剛度會在公式中體現(xiàn)出來,因此運(yùn)算比較合理。但正因為寬方向維度的引入,公式頗為復(fù)雜。運(yùn)算量成指數(shù)增長。
現(xiàn)在我們對我方隔離體作力學(xué)分析,見圖1。先討論和平動有關(guān)的摩擦力對人體的動力學(xué)影響。
牛頓第二定律是外力之和等于質(zhì)量與加速度乘積之和:

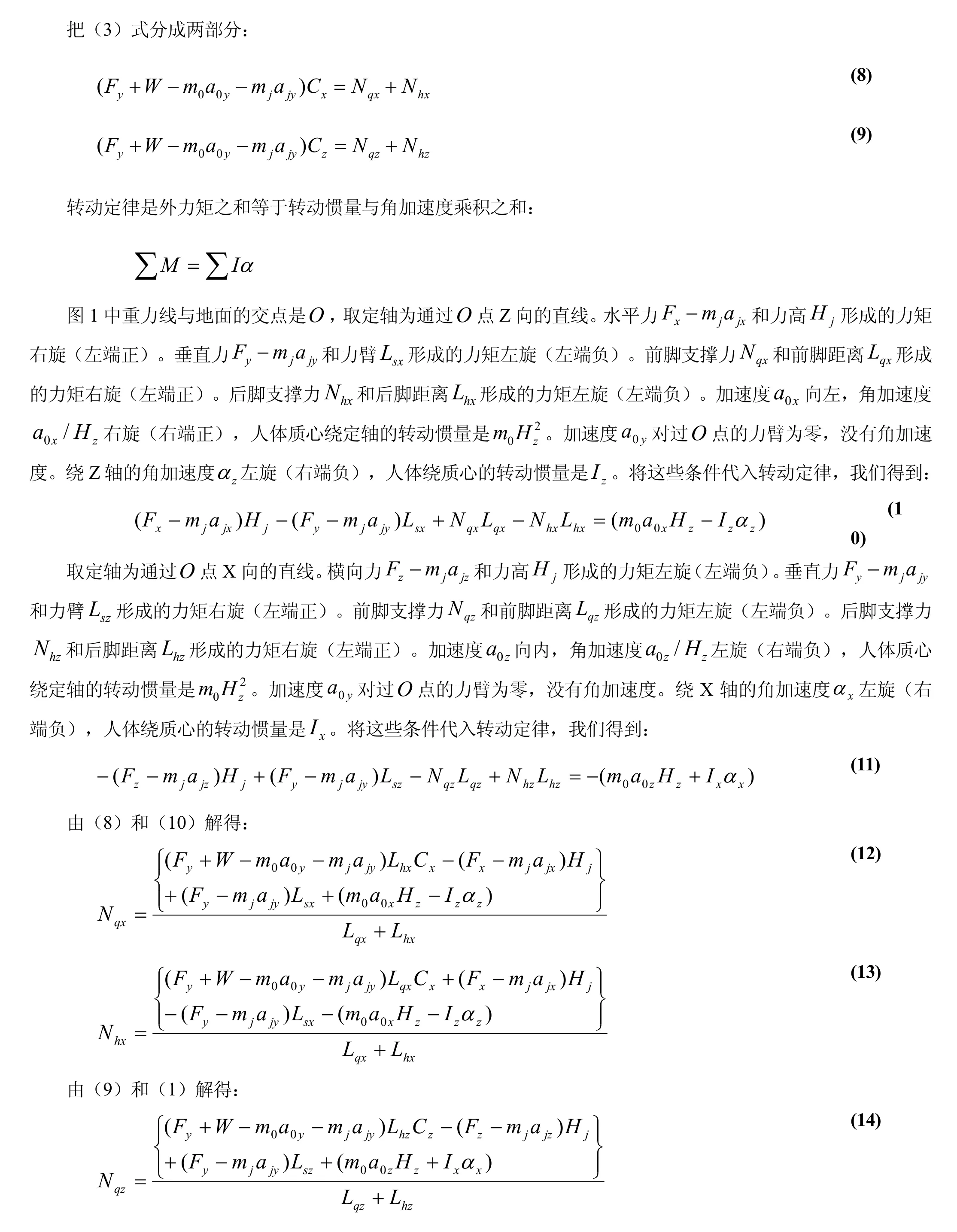
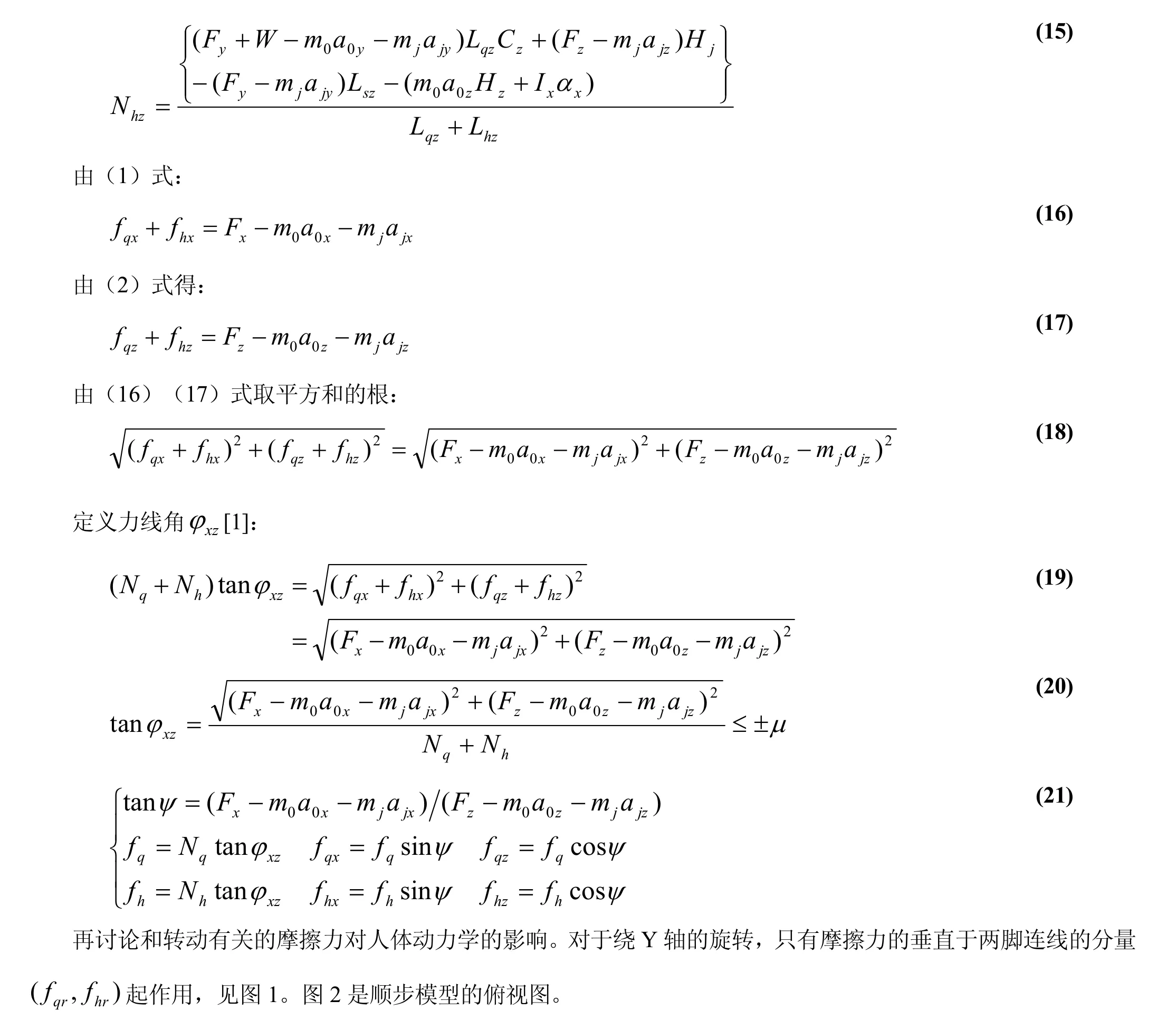
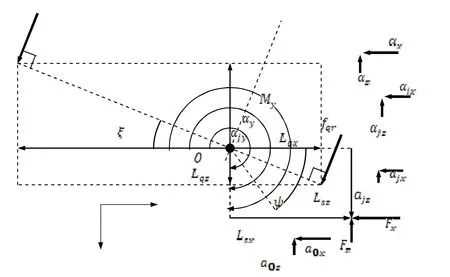
圖2 順步模型俯視圖


在橫向Z將框架限制在一個平面內(nèi),我們得到平面模型的特例,(29)簡化變?yōu)楹臀墨I(xiàn)[1][2]一致的公式。
二、三維傳遞力作用下順右弓步的力學(xué)分析
我方和對方接觸,接觸處的力有大小方向。一般情況下力有三個方向的分量。比如楊式太極拳的 斜飛 ,我方向前、上、橫方向攻擊對方,見圖3。
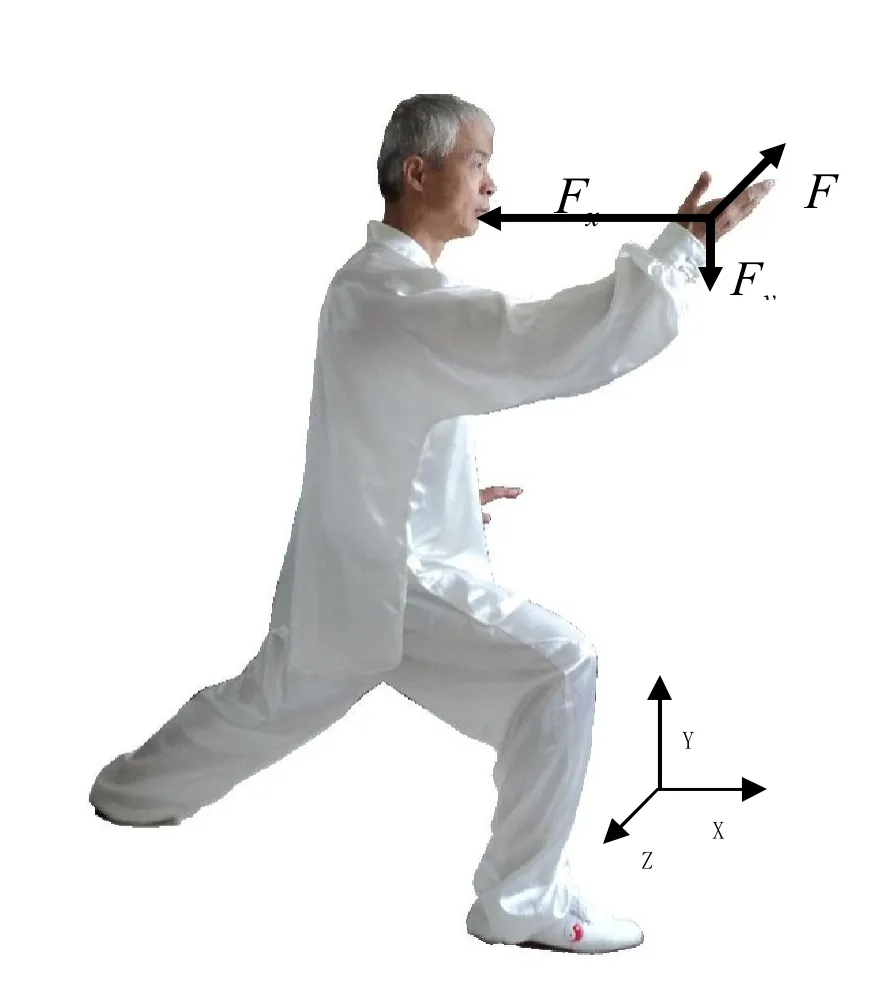
圖3 我方弓步斜飛勢
公式(29)包括在接觸處三種力的效果:由腳根傳遞來的力、人體的動量的碰撞力、肢體相對運(yùn)動動量的碰撞力。先分析只有傳遞力的情況,將整體和相對加速度設(shè)為零,(29)式可得到很多簡化。
弓步的輸入是,
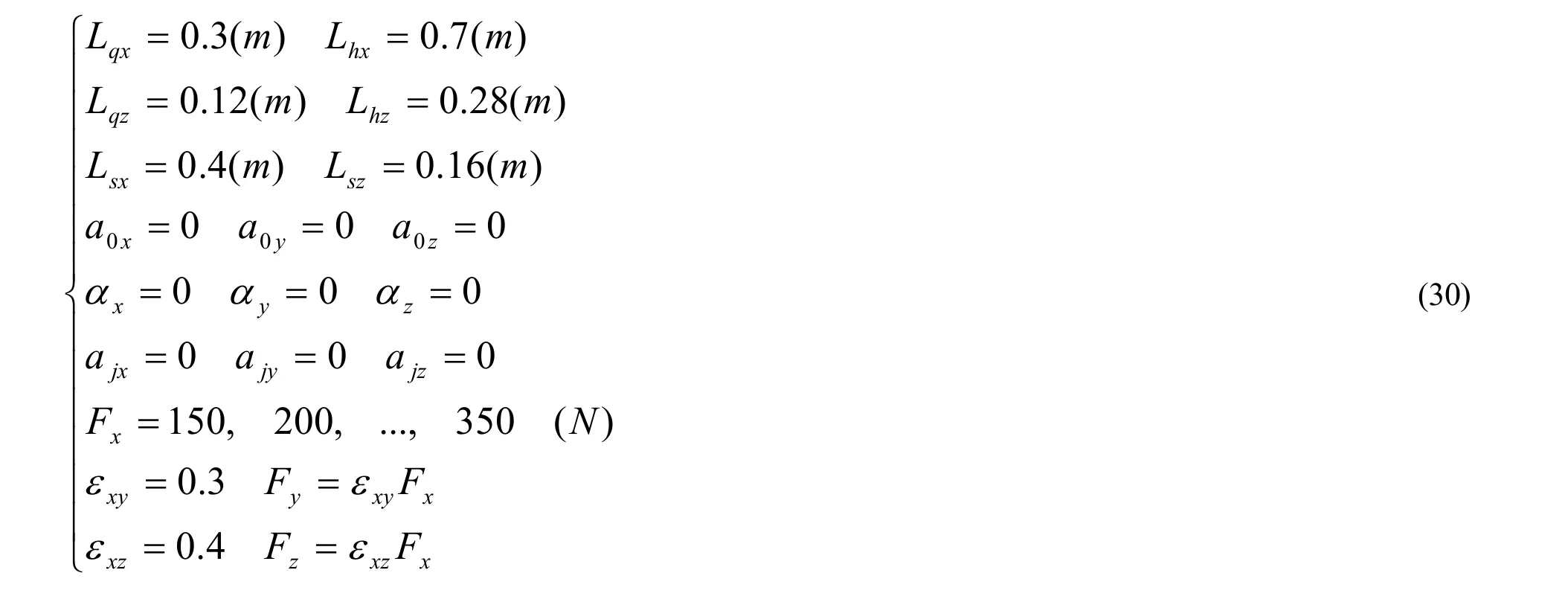
將(30)代入(29)計算結(jié)果如表1。
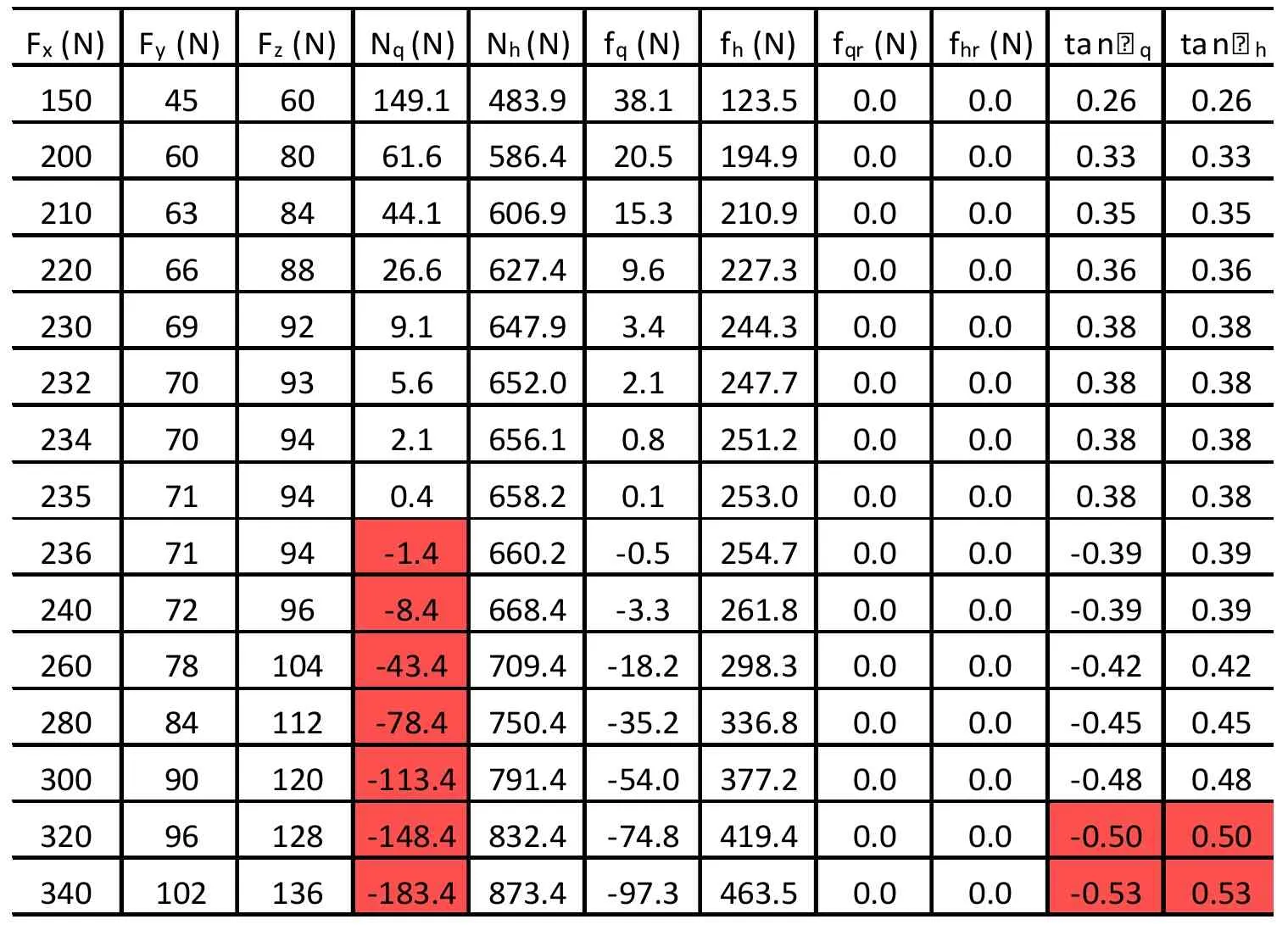
表1 只有傳遞力時順弓步的攻擊力、正壓力和摩擦力
圖4是前后腳正壓力隨輸入Fx變化的曲線。
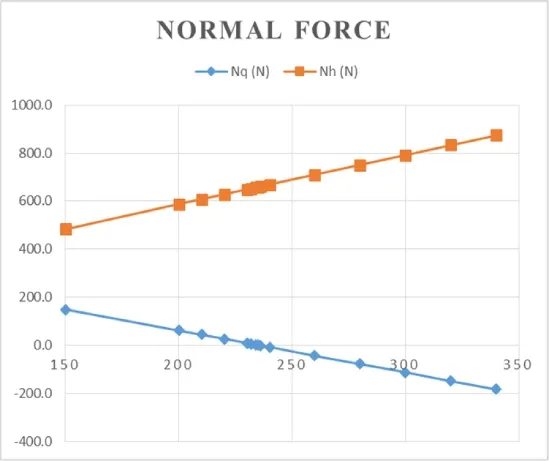
圖4 弓步斜飛勢正壓力曲線
圖5是前后腳力線角正切隨輸入Fx變化的曲線。
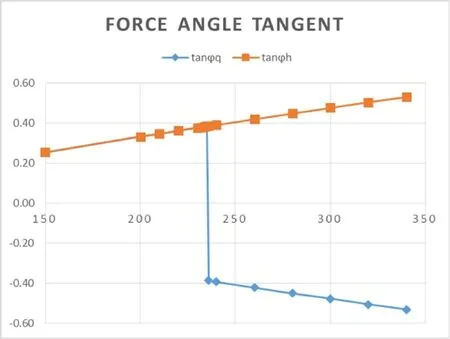
圖5 弓步斜飛勢力線角曲線
本例中水平力Fx是主要輸入,垂直力和橫向力按比例輸入。
臨界值應(yīng)由(29)中前腳正壓力為零 Nq=0,或后腳正壓力為零 Nh=0,或前腳力線角正切等于摩擦系數(shù)tan φq=μ,或后腳力線角正切等于摩擦系數(shù) tan φh=μ四個方程解出水平力Fx,即臨界力。但是公式(29)很復(fù)雜,完美的解不可能用公式來表達(dá)。
這里用的是優(yōu)越表逆推法。
先將Fx作為輸入,用公式(29)計算前后腳正壓力 (Nq, Nh),畫出曲線,反過來尋找正壓力為零時的Fx輸入值。類似地,先將Fx作為輸入,用公式(29)計算前后腳力線角正切 (tan φq,tan φh),畫出曲線,尋找力線角正切等于摩擦系數(shù)時的Fx輸入值。四個臨界條件都有可能發(fā)生,最早發(fā)生的臨界條件起控制作用。
由表1和圖4圖5可見前腳失根起控制作用。臨界失根力為 Fx:Fy:Fz=236:71:94牛頓。為了比較細(xì)致的計算臨界值,輸入的間隔是不均勻的(見表1第一欄)。
由表1看出,第二、三個臨界條件是兩腳打滑。注意,力線角可以在+/-180度內(nèi)取值,所以其正切的符號可正可負(fù),重要的是量值等于摩擦系數(shù)。本例中在 Fx=320時前腳的力線角正切 tan φq=-μ,前腳開始打滑。當(dāng)然本例中該條件不起控制作用。
該算例以水平力:垂直力:橫向力=1:0.3:0.4來計算。實際發(fā)力不一定按這個比例,而是在需要的方向發(fā)力。
表2列出了多向和單向力的計算結(jié)果。
表2中三向力的數(shù)值(第二欄)遠(yuǎn)大于只有水平力(第三欄)及只有橫向力(第五欄),這是因為發(fā)力方向和兩腳連線較接近。

表2 只有傳遞力、沒有整體和相對動量時順弓步的臨界攻擊力
文獻(xiàn)[2]提出平面剛體模型的分析。相比之下,本文立體模型的分析和平面模型的分析趨勢一致,但對其有所修正。下面我們來仔細(xì)討論。表 3列出了用平面模型算出的相應(yīng)結(jié)果。平面模型有三個基本假定:1、人體在紙面內(nèi)。2、用垂直于紙面的橫向力推不倒人體。3、垂直于紙面的摩擦力由Y向力矩來推算。第一個假定比較直觀,容易理解。第二個假定需要一些解釋。平面模型假定前后腳和地面的連接是兩個點,兩點連成的線也在平面內(nèi)。人站在這條假象線上只有瞬間的穩(wěn)定,任何微小的橫向力都能推倒人體。實際上人體的側(cè)向穩(wěn)定能力由兩腳間的步寬及腳本身的寬度來提供,但在平面模型中這兩種寬度都變成了零。為了避免模型在數(shù)學(xué)上失穩(wěn),平面模型避免對此連線使用轉(zhuǎn)動定律,或者說假定人體繞該連線有無限大的轉(zhuǎn)動剛度。
現(xiàn)在我們可以來比較一下表2和表3。最后一欄在僅有橫向力時平面模型的橫向攻擊力是186牛頓,立體模型的橫向攻擊力是76牛頓,誤差比是186/76=2.4。由于假定2,平面模型過高的估計了自己的能力。第四欄在僅有垂向力時平面模型的垂直向攻擊力是1765牛頓,立體模型的垂直攻擊力是353牛頓,誤差比是1765/353=5。由于假定 1,平面模型認(rèn)為手和腳在一個平面內(nèi);而立體模型則客觀的認(rèn)為接手處不一定在兩腳連線的垂面內(nèi)。由此平面模型極高的估計了自己的垂向能力。第三欄在僅有水平力時平面模型的水平攻擊力是292牛頓,立體模型的水平攻擊力是172牛頓,誤差比是292/172=1.7。由于假定1,平面模型認(rèn)為手和腳在一個平面內(nèi);而立體順步模型則客觀的認(rèn)為接手處不一定在兩腳連線的垂面內(nèi),而且手的水平攻擊方向和兩腳連線的垂面有一個明顯的夾角。由此平面模型又高估計了自己的水平能力,但是平面模型面內(nèi)的性能在本例中是主要的,所以其偏差比例沒有橫向力和垂直力高。
第二欄中平面模型的三向攻擊力是 221:64:85牛頓,立體模型的三向攻擊力是 236:71:94牛頓,誤差比是212/236=0.9。這回是低估了?注意立體模型的第一臨界條件是前腳失根,而平面模型的第一臨界條件是前腳打滑。為等價比較,我們在表 3第四、五行中列出了平面模型的前腳失根的結(jié)果,它們是 535:161:214,誤差比是535/236=2.3。就這個比法,平面模型還是高估了自己的三維攻擊力。由于假定3,腳底摩擦力的承受能力和兩腳的間距成正比。平面模型的間距取1米。由于加入了步寬,立體模型兩腳的間距是米。所以就打滑而論,用平面模型計算出的攻擊力較立體模型的低。由表2和表3的第二欄可見,立體模型失根先于打滑,而平面模型正相反,這是受三個假定及輸入人體尺度的綜合影響。當(dāng)然,第一臨界條件起控制作用,因此三向攻擊力的計算中平面模型和立體模型的誤差比還是0.9。

表3 平面模型的結(jié)果
立體模型考慮了步寬的影響、考慮了手和腳的相對位置關(guān)系,得出的公式頗為復(fù)雜,但比平面模型要合理得多。當(dāng)然立體模型也有局限性。前面說平面模型中,假定用垂直于紙面的橫向力推不倒人體,我們可以把這個紙面這個平面稱為奇面。立體模型也有一個奇面,這奇面是兩腳連線的垂面。和平面模型相比,立體模型的奇面和紙面有一個夾角。這個夾角在數(shù)學(xué)上體現(xiàn)了步寬的影響,手和奇面的距離面也有了數(shù)學(xué)表述,因此模型的力學(xué)性能得到了改善。
人體是具有六個自由度的剛體,作用于人體上有三個方向的力和三個方向的力矩。只有立體模型才能對這個體系作完整的力學(xué)分析。雖然轉(zhuǎn)了一個角度,奇面仍然存在,也就是說,立體模型仍然要假定“用垂直于兩腳連線垂面的斜向力推不倒人體”。立體模型仍然假定前后腳和地面的交接處是兩個點。較準(zhǔn)確的模型應(yīng)該計入腳的寬度。但如何計入腳的寬度呢?譬如把每一腳簡化為兩個點,那么人體就有四個點和地面接觸。三個點為穩(wěn)定支撐,四個點限制過度。限制過度將使力學(xué)計算非常復(fù)雜。
另外,現(xiàn)在用的是剛體模型,即人體內(nèi)在的抵抗力是無窮的。在論文[3]中我們提出了人體的三鉸拱模型。在那里我們把胯部簡化為一個鉸。其實胯部既不是剛接,也不是鉸接,而是介于兩種理想接點之間的粘彈性連接。人體是生物體,胯部有骨頭、肌肉、韌帶、血液、等等,所以胯部宜用粘彈體描述。粘彈體是比彈性體或塑性體更復(fù)雜的力學(xué)材料。
那么人體的其他部分怎么辦?比如說腿、腰、胸、肩、手?我們可以建立有限元模型,即按照人體的力學(xué)性能,將人體劃分成一些列單元,加入邊界條件,用數(shù)值運(yùn)算法求解。本文只能指出一個方向,有更多的研究工作等在前面。
平面模型、立體模型、有限元模型都要有實驗證明。人體的參數(shù)需要通過度量來建立一個數(shù)據(jù)庫。進(jìn)而可以研討高體能和高技術(shù)的對抗。摩擦力、摩擦系數(shù)需要測量,各種鞋底和地面的關(guān)系由摩擦系數(shù)來表述。現(xiàn)行太極鞋漂亮、合腳、耐久,但鞋底和地面的關(guān)系缺少定量的研究。要用傳感器,測力器來測量打太極拳或推手時的力學(xué)參量,測量力、力矩、速度、加速度、功率、等等,因而可以驗證模型的適用范圍。模型和實驗都是用來指導(dǎo)應(yīng)用的, 驗證實際的攻防能力,進(jìn)而設(shè)計、優(yōu)化新的招式。醫(yī)學(xué)上,體育運(yùn)動學(xué)上的儀器可以幫助測定太極拳的健康和養(yǎng)生效果。將太極拳和現(xiàn)代科學(xué)聯(lián)系起來有廣大的前景,有理論和實際的重要意義。
三、三維傳遞力和整體動量作用下順右弓步模型的分析
整體動量增加攻擊力。綜合三維力和整體動量的效果,刪除相對動量的部分引起的加速度,(29)式得到簡化。弓步納入整體動量的輸入是,
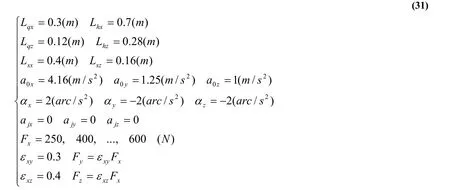
圖6示出了我方有整體動量的示意圖。
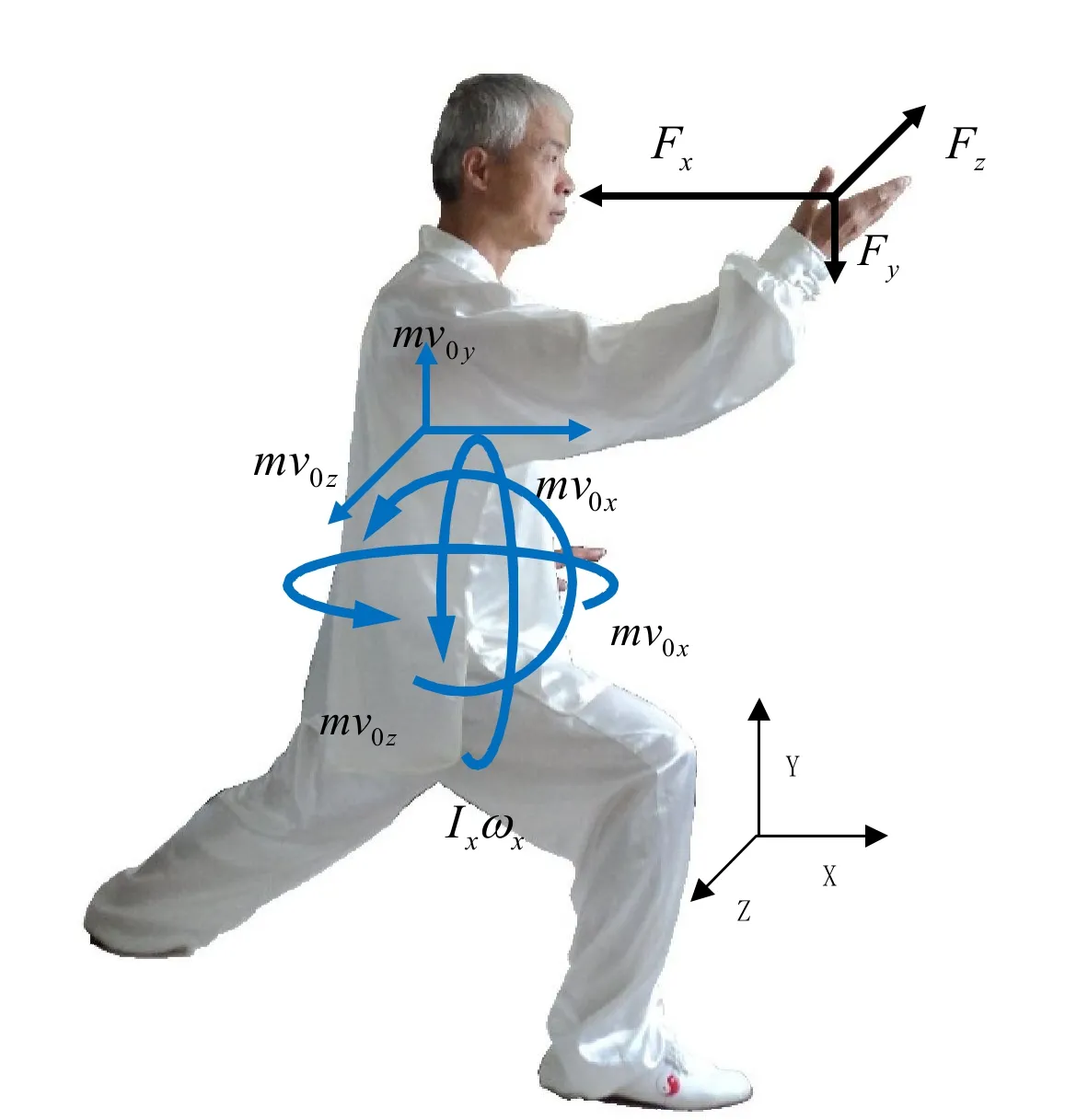
圖6 我方弓步整體動量斜飛勢
將(31)代入(29)計算結(jié)果如表4。
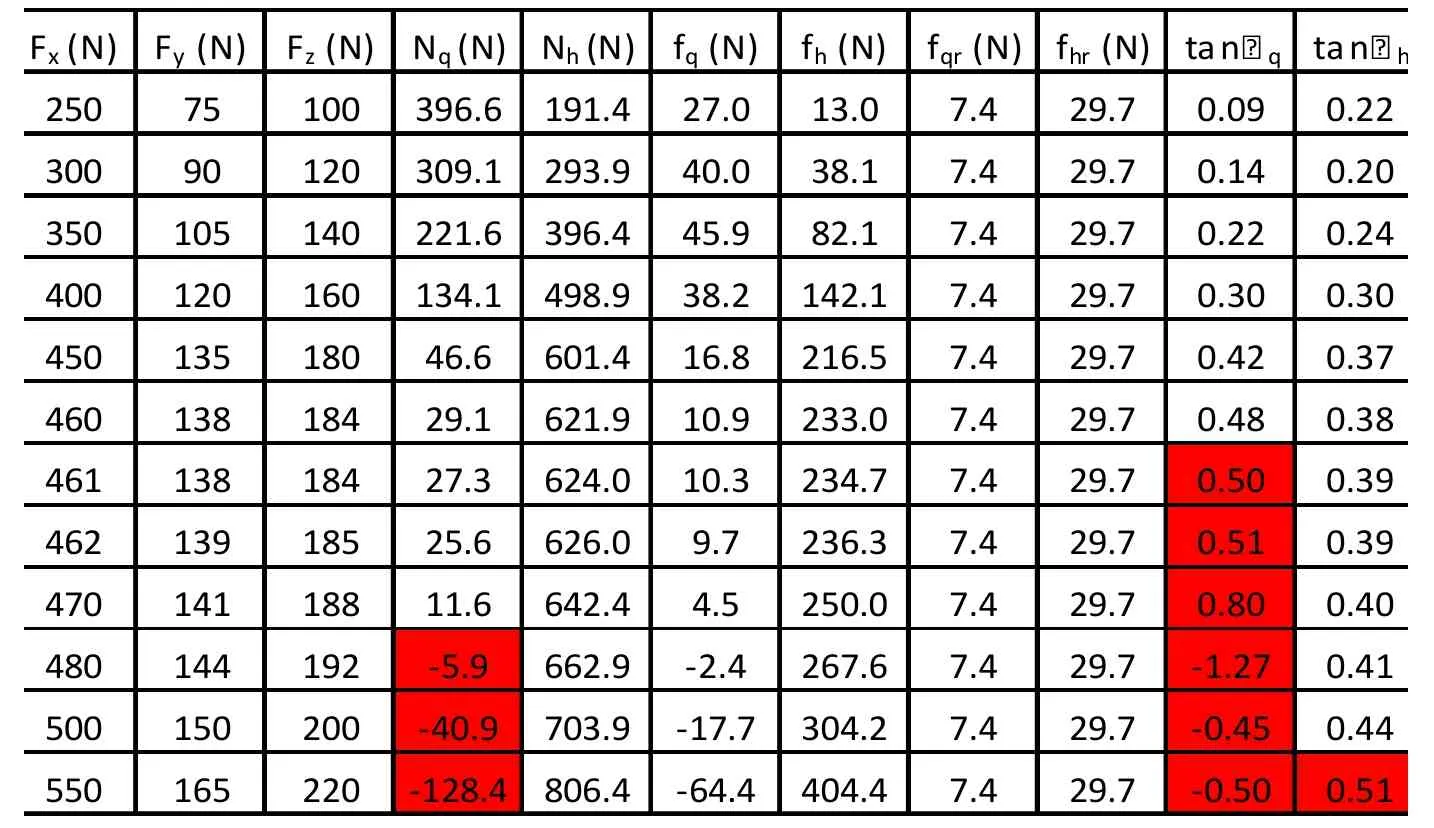
表4 有傳遞力和整體動量,沒有相對動量時右弓步的攻擊力、正壓力和摩擦力
由表可見前腳打滑 其控制作用。臨界打滑力為 Fx:Fy:Fz=461:138:184牛頓。由表4看出,第二臨界條件是前腳失根、第三個臨界條件是后腳打滑。
該算例以水平力:垂直力:橫向力=1:0.3:0.4來計算。表5列出了多向和單向力和速度時的計算結(jié)果。

表5 有傳遞力和整體動量,沒有相對動量時右弓步的臨界攻擊力
比較表5和表2,可見整體動量很大地增加弓步的攻擊力(除了垂直向)。
表5第6、7欄是有整體旋轉(zhuǎn)動量時的臨界力。經(jīng)典理論強(qiáng)調(diào)腰的動態(tài)作用。現(xiàn)代認(rèn)為是腰胯的聯(lián)合作用。下盤穩(wěn)住,翻胯、轉(zhuǎn)腰胯、旋胯使上盤具有角動量。該角動量和對方碰撞而產(chǎn)生攻擊力。第6欄是水平攻擊力,第7欄是橫向攻擊力。
四、三維傳遞力和整體及相對動量作用下順右弓步模型的分析
相對動量增加攻擊力。綜合三維力、整體動量和相對動量的效果,(29)成立。弓步納入相對動量的輸入是:
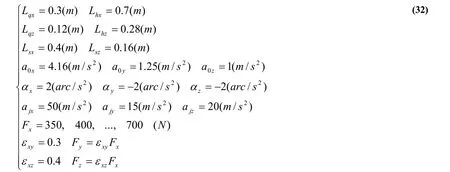
圖7示出了我方加有相對動量的示意圖。
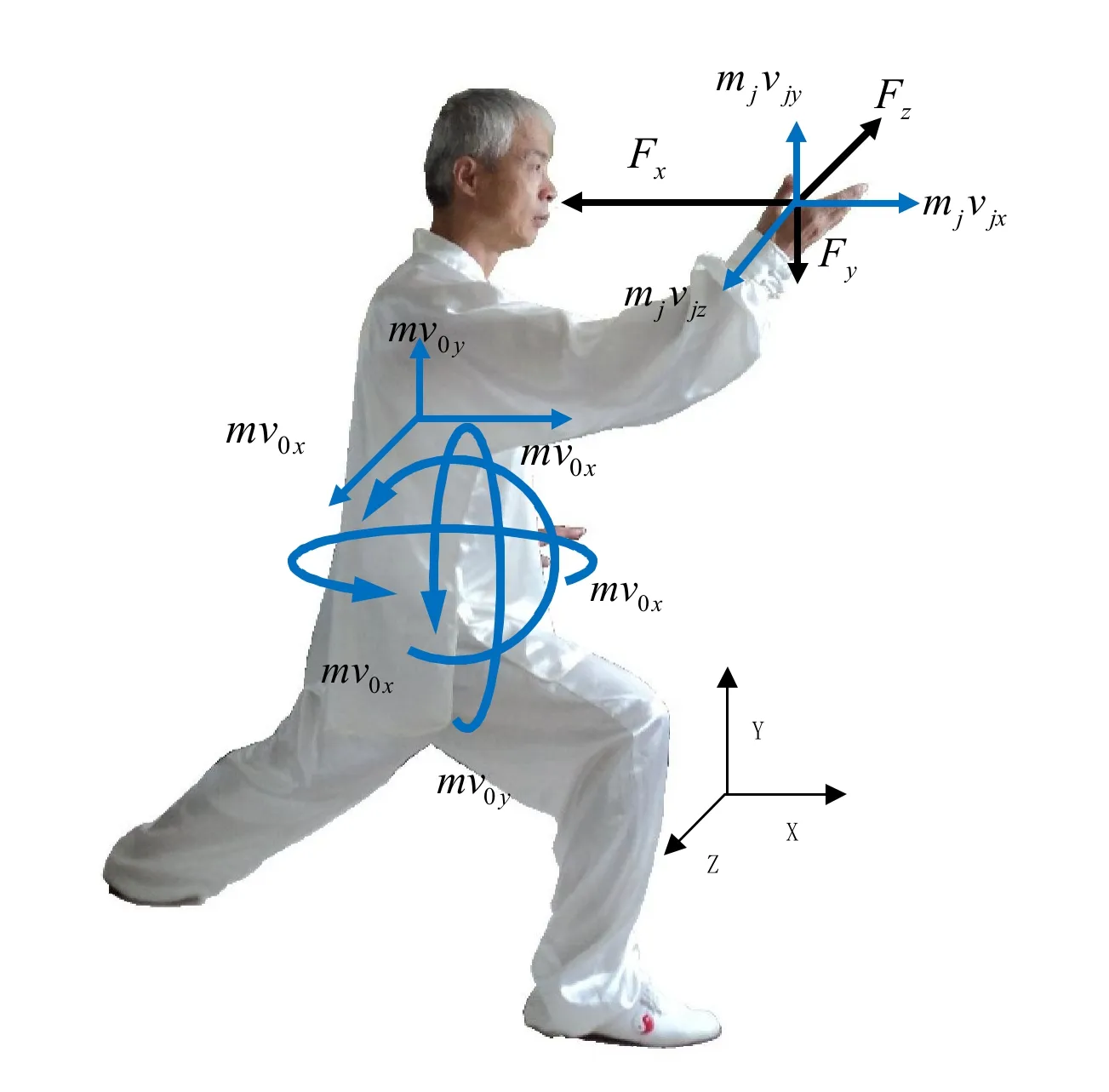
圖7 我方弓步加入相對動量斜飛勢
將(32)代入(29)計算結(jié)果如表6。
比較表6和表4,水平攻擊力增加了100牛頓時,正壓力和摩擦力維持原值。即在同樣的腳底條件下,相對動量增加臨界值。
由表6可見前腳打滑 其控制作用。臨界打滑力為 Fx:Fy:Fz=561:168:222牛頓。由表5看出,第二臨界條件是前腳失根、第三個臨界條件是后腳打滑。
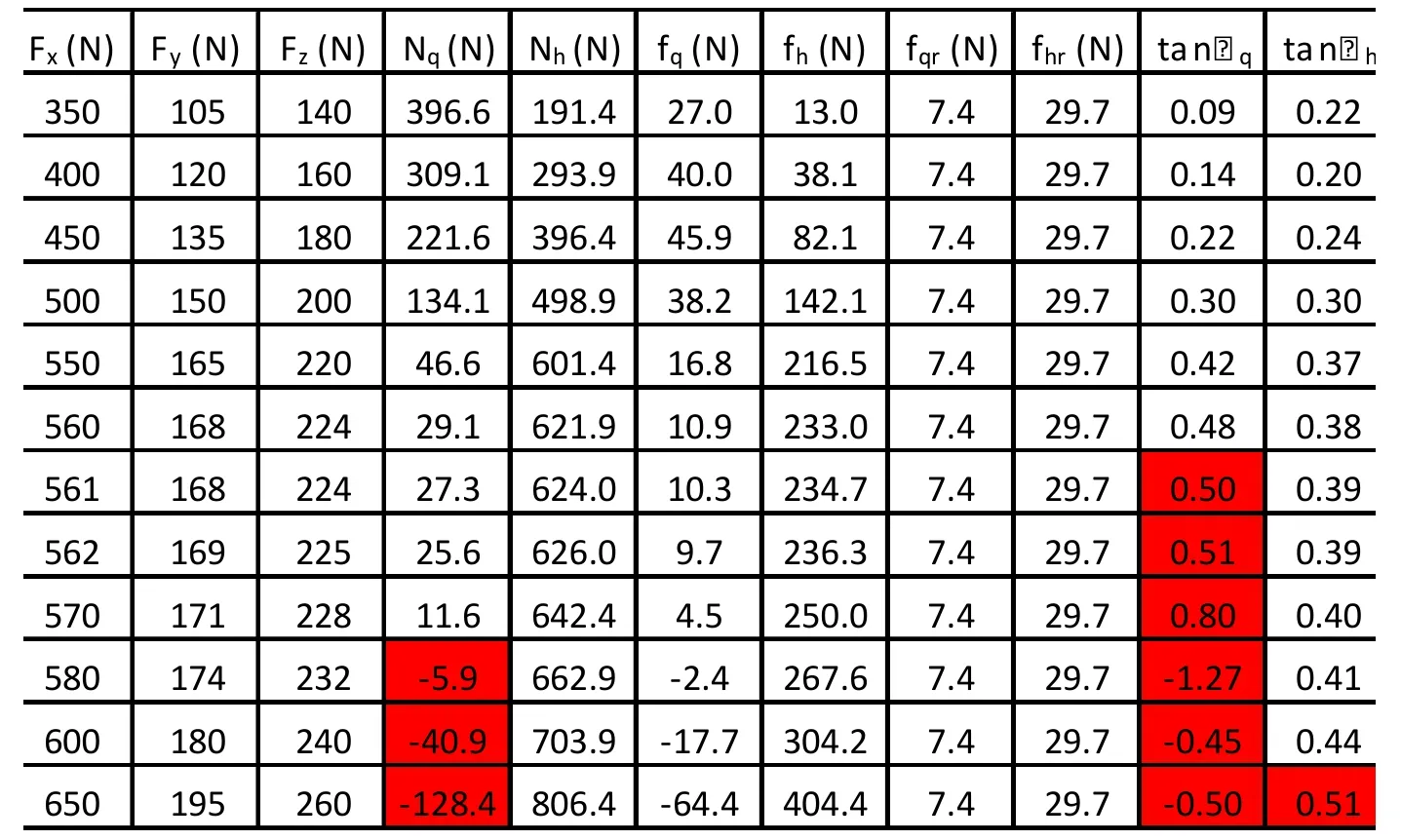
表6 有傳遞力和整體及相對動量時右弓步的攻擊力、正壓力和摩擦力
該算例以水平力:垂直力:橫向力=1:0.3:0.4來計算。表7列出了多向和單向力和速度時的計算結(jié)果。

表7 有傳遞力和整體及相對動量時右弓步的臨界攻擊力
比較表7和表5,可見相對動量增加弓步的攻擊力。表7第6和第7欄是只有整體旋轉(zhuǎn)動量加相對動量時的臨界力。
五、拗步立體剛體模型
圖8是拗步剛體模型,左腳在前,右腳在后,手在右方。例如楊式左摟膝拗步,左腳和右手在前。由模型我們得到拗步剛體模型的公式(推導(dǎo)從略)。
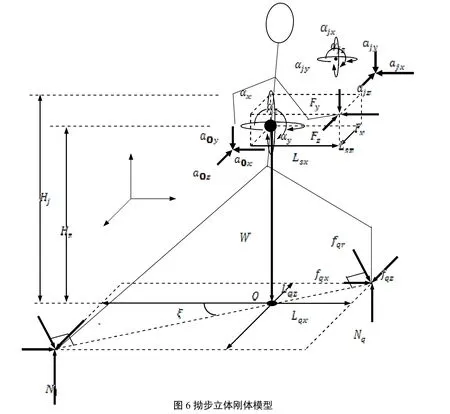
圖6 拗步立體剛體模型
概括平衡條件和解,我們得到拗步模型,

六、順步和拗步的統(tǒng)一數(shù)學(xué)模型
順步模型圖1和圖2中重心到前腳的橫向距離Lqz由重心指向外;重心到后腳的橫向距離Lhz由重心指向內(nèi)。拗步模型圖8中重心到前腳的橫向距離Lqz由重心指向內(nèi);重心到后腳的橫向距離Lhz由重心指向外。兩者方向相反。拗步模型圖1和圖2中兩腳間距寬長比總是取正值。拗步模型圖8中兩腳間距寬長比也總是取正值。如果我們把負(fù)的Lqz和Lhz輸入順步模型,則圖1變成圖8;寬長比取負(fù)值。即負(fù)的Lqz和Lhz輸入順步模型使其變?yōu)檗植侥P汀7粗渤闪ⅲ簇?fù)的Lqz和Lhz輸入拗步模型使其變?yōu)轫槻侥P停?9)式。如此我們極大地簡化了軟件設(shè)計。我們只需一個模型,將負(fù)值代入以得到另一個模型。我們?nèi)№槻侥P蜑榛#x符號規(guī)則而得到統(tǒng)一模型,見表8。
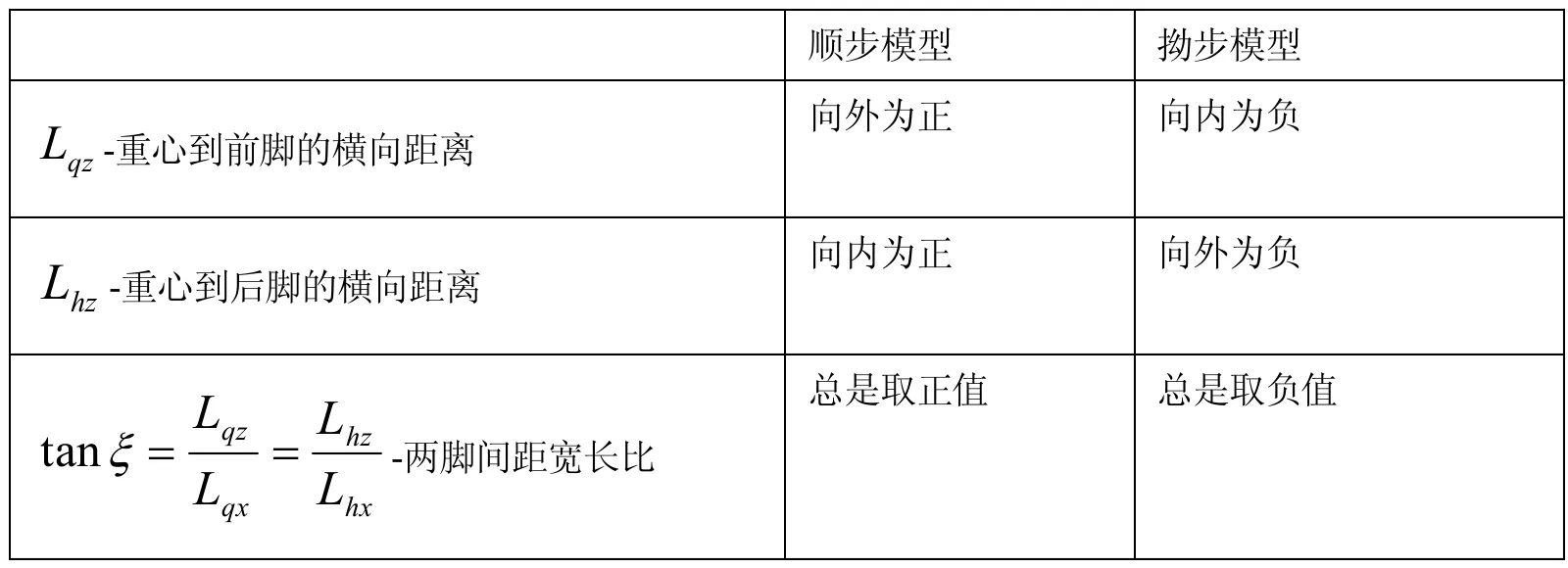
表8 右步左步統(tǒng)一模型
[1]顧杰、郭振興、呂蒙“用人體平面剛體模型分析太極拳在水平作用力下的力學(xué)原理” 邯鄲學(xué)院學(xué)報,2015年第2期82-107頁。
[2]顧杰、郭振興、馬秀杰“用人體平面剛體模型分析太極拳在三維作用力下的力學(xué)原理” 邯鄲學(xué)院學(xué)報,2015年第4期。
[3]顧杰、王萬賓、郭振興、楊大衛(wèi) “太極拳中膝關(guān)節(jié)彎曲的力學(xué)” 中華武術(shù)研究 2016 待發(fā)。
(責(zé)任編輯:賈建鋼 校對:朱艷紅)
G852.11
A
1673-2030(2016)02-0067-21
2016-01-05
顧杰(1955—),男,江蘇蘇州人,邯鄲學(xué)院太極文化學(xué)院客座教授,美國通用汽車公司高級工程師,美國奧克蘭大學(xué)機(jī)械制造博士;郭振興(1950—),男,河北邯鄲人,邯鄲學(xué)院太極文化學(xué)院原院長,高級政工師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少林與太極(2023年5期)2023-07-14 03:01:50
少林與太極(2023年5期)2023-07-14 03:01:48
少林與太極(2023年3期)2023-07-14 02:49:56
基層中醫(yī)藥(2021年9期)2021-06-05 07:14:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
武術(shù)研究(2020年2期)2020-04-21 10:33:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
