一種新型4D動感座椅設備的設計與分析
2016-09-12 00:24:58Designandanalysisofnew4Dmotionplatformequipment
制造業自動化 2016年8期
關鍵詞:設備
Design and analysis of a new 4D motion platform equipment
鄒曉暉,陳潤六,王紅州,鄭小民ZOU Xiao-hui, CHEN Run-liu, WANG Hong-zhou, ZHENG Xiao-min(江西省機械科學研究所,南昌 330002)
一種新型4D動感座椅設備的設計與分析
Design and analysis of a new 4D motion platform equipment
鄒曉暉,陳潤六,王紅州,鄭小民
ZOU Xiao-hui, CHEN Run-liu, WANG Hong-zhou, ZHENG Xiao-min
(江西省機械科學研究所,南昌 330002)
設計了一種以三自由度平動3-PR(4R)R并聯機構作為動力輸入,多個兩轉一移3-RPS并聯機構作為輸出的新型動感座椅設備。分別對3-PR(4R)R并聯機構和3-RPS并聯機構進行了機構模型的位置分析,并建立了動感座椅設備執行機構的整體數學模型。通過MATLAB軟件和Solidworks軟件進行了動感座椅設備的虛擬仿真分析,驗證了所設計的新型動感座椅設備的結構的合理性。得出該新型動感座椅設備非常適合應用在大型電影院4D影廳中的結論。
動感座椅;Solidworks仿真;MATLAB仿真;并聯機構
0 引言
隨著運動模擬器在動感影院的成功應用,4D電影已從小眾體驗開始向院線大規模的使用轉變。目前市場上4D影院動感座椅采用的機械結構主要有兩種:1)基于3-RPS并聯機構的三自由度動感座椅;2)基于6-UPS并聯機構的六自由度動感平臺。六自由度動感平臺具有非常強的運動模擬能力,常用于科技館的虛擬現實體驗和大型游樂場的運動仿真體驗,但由于其自身轉動運動時會造成平臺周邊與中心體感差異大的原因而不適合應用于體驗觀眾多的大型4D體驗館——如座位數量很大的電影院。三自由度動感座椅只有模擬上下運動、左右搖擺、前后俯仰等動作的能力,但其可通過在同一場館布局多套該類型動感座椅來滿足多名觀眾同時體驗的需求,因此現階段大型電影院大都采用了3-RPS三自由度動感座椅設備。
3-RPS機構在動感影院領域的潛在價值也引起了科研人員的廣泛關注:Tsai L W對3-RPS機構進行了運動學分析[1];安梓銘研究了3-RPS并聯機構的模糊PID控制[2];朱逍、沈金榮研究了4D動感座椅的控制系統[3,4];付儉定研究了結合通用PC軟硬件平臺的動感影院運動控制系統的硬件設備[5];董赟研究了一套針對虛擬過山車的控制系統[6];霍電輝設計了一種新型三自由度動感模擬平臺[7];王紅州發明了一種三平動運動輸入多重3-RPS機構運動輸出的動感座椅設備[8]。本文設計了一種新型的4D動感座椅設備,采用一個三自由度平動并聯機構作為運動輸入,4個3-RPS并聯機構作為運動輸出的新型動感座椅設備。
1 新型動感座椅的結構設計

圖1 動感座椅整體結構
該動感座椅設備由1個三平動并聯機構及4個相同的3-RPS并機構組成,整體結構如圖1所示。三平動并聯機構的構型為3-PR(4R)R,其結構如圖2所示。3-PR (4R)R并聯機構由機架、平動臺以及3條相同的PR (4R)R支鏈組成,PR(4R)R支鏈由滑塊、第一轉軸、第一連桿、第二連桿和第二轉軸組成。PR(4R)R支鏈與機架和平動臺的聯接方式為:滑塊通過移動副與機架聯接,滑塊通過轉動副與第一轉軸聯接,第一轉軸通過轉動副與第一連桿和第二連桿聯接,第一連桿、第二連桿通過轉動副與第二轉軸聯接,第二轉軸通過轉動副與平動臺聯接。平動臺在3條PR(4R)R支鏈的約束與驅動下可實現空間三維平動運動。3-RPS并機構由機架、動平臺和3條相同的RPS支鏈組成,RPS支鏈由第一伸縮桿和第二伸縮桿組成,其結構如圖3所示。機架、動平臺和RPS支鏈的聯接方式為:第一伸縮桿通過轉動副與機架聯接,第一伸縮桿通過移動副與第二伸縮桿聯接,第二伸縮桿通過球面副(球鉸)與動平臺聯接,動平臺通過球面副(球鉸)與三平動并聯機構的平動臺聯接。動平臺在3條RPS支鏈的約束下具有兩維轉動與一維移動的3個自由度。該動感座椅設備的座椅安裝在4個3-RPS并聯機構的動平臺上,其初始位姿完全相同,在三平動并聯機構平動臺的帶動下實現同步且一致的運動輸出,整個機構的主動件為三平動并聯機構上的三個滑塊。

圖2 3-PR(4R)R并聯機構示意圖
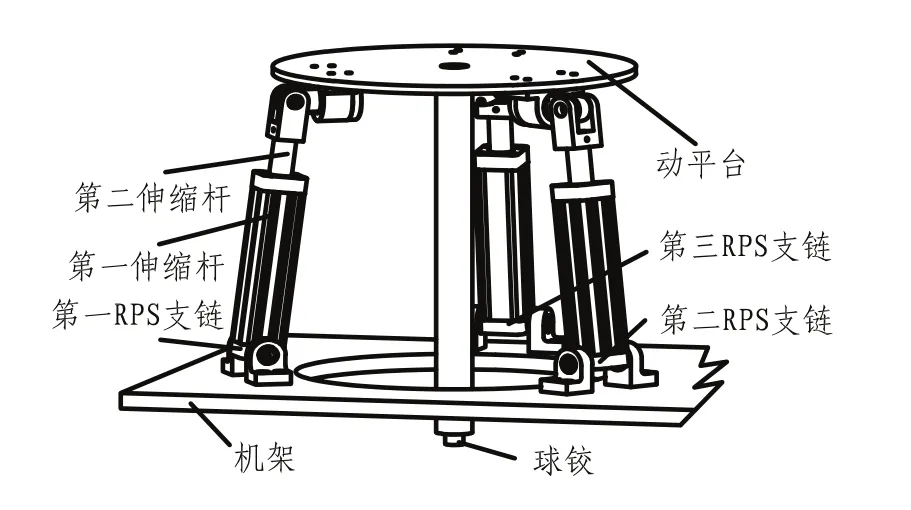
圖3 3-RPS并聯機構示意圖
2 新型動感座椅的位置分析
為簡化動感座椅執行機構的運動求解模型,首先單獨分析3-PR(4R)R并聯機構和3-RPS并聯機構,然后再建立統一的數學模型。
2.13-PR(4R)R并聯機構
3-PR(4R)R并聯機構的平動臺在3條PR(4R)R支鏈的約束下只能進行平動運動,其位姿由3個滑塊決定。現建立機構的簡化模型,以三個滑塊中心在機架上投影所構成的正三角形的中心為原點O,以滑塊運動方向為z軸,以其中兩滑塊初始位置連線方向為x軸,根據右手法則確定y軸方向,建立直角坐標系如圖4所示。其中,Ai(i=1或i=2或i=3)為第i條支鏈中第一連桿、第二連桿與滑塊聯接中心連線的中點,Bi為第i條支鏈中第一連桿、第二連桿與平動臺聯接中心連線的中點。同樣的,B1、B2、B3兩兩連線構成一個正三角形。

圖4 3-PR(4R)R并聯機構簡圖
因為平動臺是做平動運動,到所以其運動過程中B1、B2和B3點位置變化量相同,A1、A2和A3點的x、y軸的坐標是常量但z軸坐標是變量,且A1到B1的距離、A2到B2的距離和A3到B3的距離不變。以A1(A1x,A1y,A1z)、A2(A2x,A2y,A2z)、A3(A3x,A3y,A3z)、B1(B1x,B1y,B1z)、B2(B2x,B2y,B2z)、B3(B3x,B3y,B3z)為初始位置,以△x、△y、△z表示平動臺在三個坐標軸上的位置變化,以L1z、L2z、L3z表示三個滑塊在z軸方向的變化量,平動臺在滑塊上方(即Biz+△z>Aiz+Liz),則可得3-PR(4R)R并聯機構的位置方程為:

2.23-RPS并聯機構
新型動感座椅設備包含4個相同的3-RPS并聯機構,每個3-RPS并聯機構的動平臺在3條RPS支鏈的約束下只能進行空間兩維轉動一維移動運動,其位姿由動平臺上球鉸的空間位置的變化量決定。現建立4個動平臺的簡化模型,以每個動平臺中心為原點Oj(j=1或j=2或j=3或j=4),xj與x軸同向,yj與y軸同向,zj與z軸同向,建立直角坐標系如圖5所示。動平臺繞xj軸的轉角為α,動平臺繞yj軸的轉角為β,原點Oj在Oxyz坐標系中沿z軸方向移動為Lz。
動平臺運動過程中Oj只沿z軸運動且Oj與Sj的空間距離保持不變。以Oj(Ojx,Ojy,Ojz)和Sj(Sjx,SjY,SjZ)為初始位置,以α表示動平臺繞xj軸的轉角,以β表示動平臺繞yj軸的轉角,以Lz表示原點Oj在Oxyz坐標系中沿z軸方向移動,以△jx、△jy、△jz表示Sj在Oxyz坐標系中的位置變化,則可得到動平臺的位置方程為:

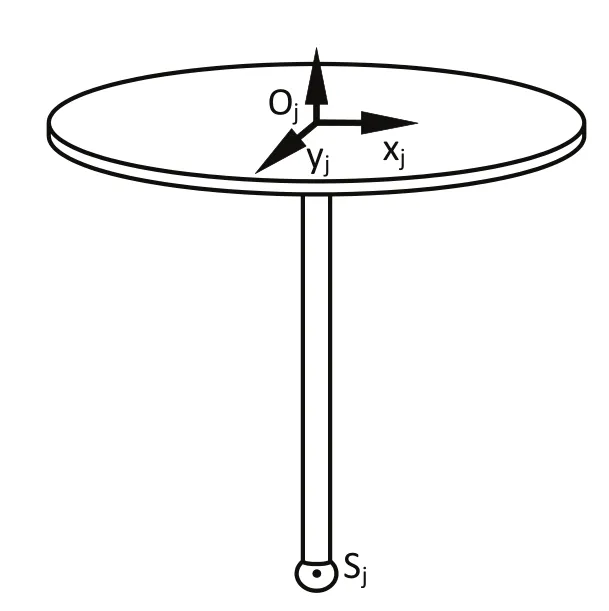
圖5 動平臺簡圖
2.3動感座椅設備的整體位置分析
由于3-RPS并聯機構的動平臺是由3-PR(4R)R并聯機構的平動臺帶動Sj產生的運動,因此,Oj(Ojx,Ojy,Ojz)在三個坐標軸上的位置變化△jx、△jy、△jz與3-PR(4R)R并聯機構的平動臺在三個坐標軸上的位置變化△x、△y、△z相同,也就是△jx=△x、△jy=△y、△jz=△z。將動平臺的位置方程代入3-PR (4R)R并聯機構的位置方程中可得動感座椅設備的整體位置方程:

3 基于MATLAB的仿真分析
MATLAB是一種可視化的具有極為強大矩陣計算能力的編程語言,它包含有上百個預先定義好的命令和函數,這些函數能通過用戶自定義函數進一步擴展。MATLAB除具有強大的矩陣運算能力外,同時還有著較強的二維、三維繪圖能力。因此MATLAB非常適合在工業研究領域里解決各種問題,是一個十分有效的工具。
3.13-PR(4R)R機構的工作空間
根據上文得出的3-PR(4R)R機構的位置方程,應用MATLAB編寫出求解的程序,進而繪出平動臺的可達工作空間。
機構的初始位置為:A1(-257.61,-446.19,75)、A2(515.22,0,75)、A3(-257.61,446.19,75)、B1(-187.64,-325,282.16)、B2(375.28,0,282.16)、B3(-187.64,325,282.16),其中Ai在z方向上的活動范圍為40≤Aiz≤150。

圖6 平動臺工作空間
根據MATLAB計算,繪出的3-PR(4R)R機構平動臺工作空間如圖6所示。
3.2動感座椅設備的運動仿真
設定一組動感座椅的動作:第1秒,座椅(動平臺)繞y軸逆時針轉8度;第2秒,座椅回到原位;第3秒,座椅繞y軸順時針轉8度;第4秒,座椅回到原位;第5秒,座椅繞x軸逆時針轉8度;第6秒,座椅回到原位;第7秒,座椅繞x軸順時針轉8度;第4秒,座椅回到原位。
根據動感座椅設備的位置方程,應用MATLAB分別求取每個時間節點三個滑塊的相對位移,進而求出滑塊的速度、加速度,繪制出滑塊的位移、速度及加速度曲線。如圖7~圖9所示。

圖7 滑塊位移曲線
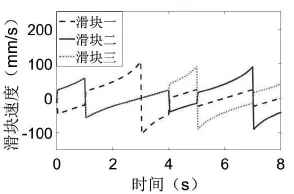
圖8 滑塊速度曲線
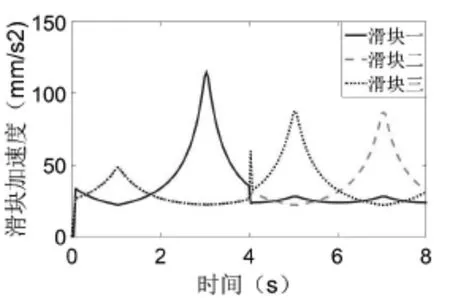
圖9 滑塊加速度曲線
4 基于Solidworks的仿真分析
Solidworks Motion是Solidworks軟件中的一個插件,是一個虛擬原型機仿真工具,能實現全面的動力學和運動學仿真,并可得到系統中零件的作用力、反作用力、速度、加速度以及位移等運動參數。并且輸出結果能以動畫、圖形以及表格等多種形式表示。此外,在復雜運動情況下,還能在其他有限元分析軟件中輸入零部件的復雜載荷情況,從而能對其結構和強度進行準確的分析。
首先,應用Solidworks軟件,根據上文所述的條件,構建了一套動感座椅的虛擬樣機(如圖1所示)。然后將其加載到Solidworks Motion模塊中,在其動平臺上加載了三個線性驅動以進行運動學仿真。
輸入與上文MATLAB仿真相同的動作,Solidworks Motion可直接求得滑塊的位移、速度及加速度曲線,如圖10~圖12所示。對比MATLAB仿真與Solidworks仿真結構,可知上述位置方程的正確性,也可說明此結構可應用到動感座椅設備上。

圖10 滑塊位移曲線

圖11 滑塊速度曲線
5 結束語
本文所分析的動感座椅設備采用了三平動運動作為輸入,多個座椅同步實現兩轉一移運動的輸出。建立了該設備執行機構的位置方程,并通過MATLAB計算與Solidworks仿真分析,驗證了方程的正確性。該設備具有控制簡單,成本較低的優點,非常適合應用在電影院中座位數多的4D影廳。
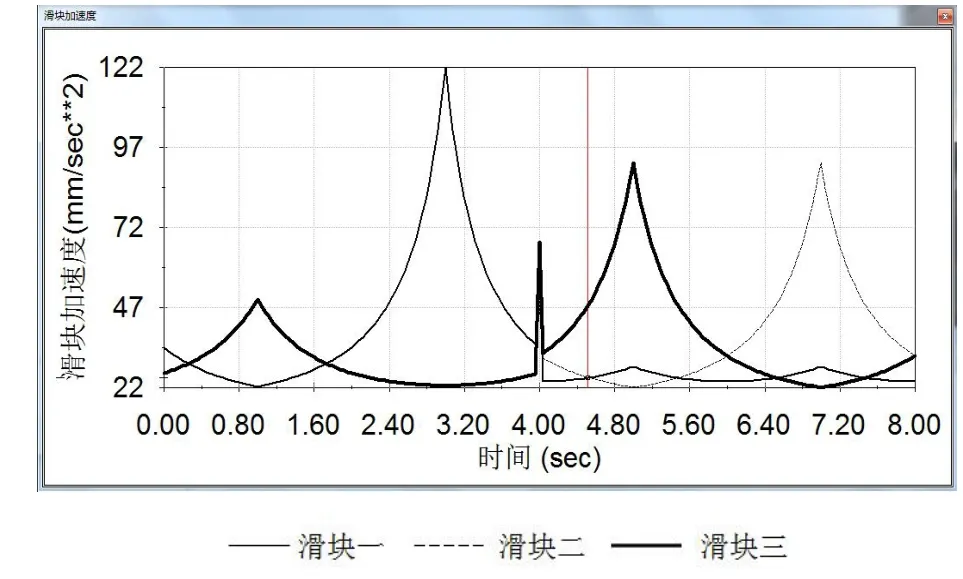
圖12 滑塊加速度曲線
[1] Tsai L W.Direct kinematic analysis of a 3-RPS parallel manipulator[J].Mechanical and Machine Theory,2003,38(1):71-83.
[2] 安梓銘,朱大昌,李雅瓊,等.基于3-RPS型并聯機器人模糊PID控制研究[J].制造業自動化,2014,36(8):15-18.
[3] 朱逍.4D影院動感座椅控制系統的設計與研究[J].控制系統,2010,26(12-1):92-94.
[4] 沈金榮,呂全亞,蔡昌春,等.4D動感數字電影控制系統的研究與實現[J].計算機測量與控制,2009,17(4):697-699.
[5] 付儉定.4D動感影院控制系統的研究與設計[D].秦皇島:燕山大學信息科學與工程學院,2013.
[6] 董赟.基于虛擬現實技術的動感過山車系統的設計與開發[D].沈陽:東北大學信息科學與工程學院,2009.
[7] 霍電輝.新型三自由度動感模擬平臺的研發[D].太原:太原科技大學機械電子工程,2013.
[8] 王紅州.三平動輸入多重3-RPS機構輸出的4D特效座椅:中國,ZL201410319373.5[P].2016-01-20.
TH112
A
1009-0134(2016)08-0102-04
2016-06-17
江西省科技支撐重點項目(20151BBE50125)
鄒曉暉(1976 -),男,江西南昌人,高級工程師,本科,研究方向為并聯機構。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00