面向光學載荷的臂式指向的加速度反饋補償
2016-09-12 00:24:14帥HEShuai中國科學院長春光學精密機械與物理研究所長春130033
制造業自動化 2016年8期
關鍵詞:振動
賀 帥HE Shuai(中國科學院長春光學精密機械與物理研究所,長春 130033)
面向光學載荷的臂式指向的加速度反饋補償
賀 帥
HE Shuai
(中國科學院長春光學精密機械與物理研究所,長春 130033)
光學載荷在軌對目標凝視成像時,需要光軸長時間指向目標。基礎振動會對光軸的指向產生影響,從而引起目標成像模糊,為此開展了抑制基礎振動影響的加速度反饋補償研究。以面向光學載荷的3自由度臂式機構為研究對象,首先分析了基礎振動對光學載荷指向精度的影響;接著建立了帶基礎振動的臂式機構的動力學方程,然后根據動力學方程得到了加速度反饋補償力矩的計算公式;最后采用MATLAB/Simulink與ADAMS聯合仿真對加速度反饋補償方法進行理論驗證。仿真驗證分兩部分進行,分別為不同線振動下的仿真與不同姿態下的仿真。不同線振動擾動與不同姿態下的仿真時,載荷在基礎振動與加速度反饋補償力矩的作用下能保持穩定的指向,驗證了加速度反饋補償方法的正確性。
臂式機構;基礎擾動;光學載荷;指向精度;
0 引言
空間技術的發展對空間光學載荷的指向精度、穩定性要求越來越高,特別是在大型巡天望遠鏡、遠距離激光通信等領域。光學載荷的支撐機構[1~4]是保證光學載荷指向精度和穩定性的主要機構。臂式支撐技術是一種新型的光學載荷支撐技術,一般用于大型光學載荷。美國未來將要發展的大型空間望遠鏡ATLAST[5]、SAFIR[6]望遠鏡均采用這種技術。然而光學載荷主體的外部擾動會造成光軸與成像目標之間產生相對運動,引起成像質量的下降,這就需要對光學載荷的光軸指向加以控制,保證光軸指向的穩定,實現光學載荷對期望目標的精確指向,為此,本文開展了加速度反饋補償的研究。
本文以面向光學載荷的3自由度臂式機構為研究對象,將基礎振動簡化為3個移動關節。首先分析了基礎角振動與線振動對光學載荷指向精度的影響;接著采用D-H(Denavit-Hartenberg)建模方法與牛頓-歐拉方程建立了帶基礎振動的臂式機構的動力學方程,并根據動力學方程得到了加速度反饋補償力矩的計算公式;最后采用MATLAB/Simulink與ADAMS聯合仿真,驗證加速度補償方法的正確性與可行性。仿真模型包括光學載荷在基礎線振動下的姿態變化模型和光學載荷在基礎線振動與加速度反饋補償力矩作用下的姿態變化模型。仿真結果表明,在基礎線振動與加速度反饋補償力矩的作用下,光學載荷能保持穩定的指向,驗證了加速度補償方法的正確性。
1 系統介紹
整個系統由光學載荷、驅動軸構成,如圖1所示。驅動軸共有三個,呈垂直正交布置。本文采用了簡化模型研究三軸控制加速度補償方法,光學載荷不是主要研究對象,采用模擬負載代替。

圖1 臂式機構的三維模型及連桿坐標系
2 基礎振動影響分析
空間光學載荷僅對姿態敏感,這是進行空間光學載荷振動研究的出發點。為簡化起見,分析采用如圖2所示二維模型,圖中a為驅動軸下端線振動加速度,?為角振動加速度。載荷質量為m,電機力矩為M。空間振動分為角振動和線振動,分析針對這兩種振動形式開展。
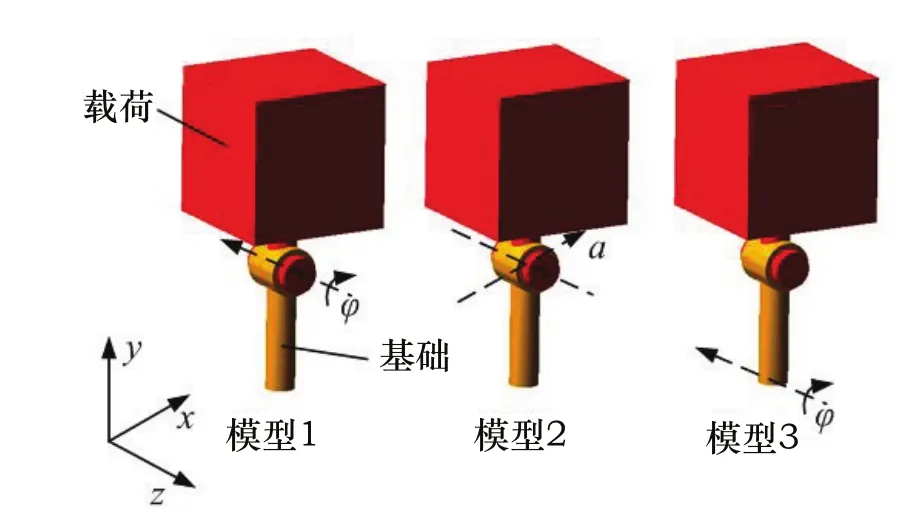
圖2 單軸支撐系統示意圖
2.1角振動影響
首先分析角振動,由于驅動軸在轉動方向僅有電磁力作用,因此驅動軸下端角振動只能通過電磁力傳遞。驅動軸中的電磁力在系統中采用基于慣性坐標系的閉環控制,其控制信號來源于安裝在載荷上的姿態傳感器,且控制回路的電流環帶寬可達上千赫茲,這些因素能夠保證電磁力穩定,受外界干擾影響小。這種情況下,角振動無法通過電磁力傳遞到光學載荷,其對系統的影響可以忽略。
2.2線振動影響
在偏心的情況下,驅動軸下端線振動也會導致載荷姿態變化,其動力學本質相當于產生了附加慣性力矩,這一點對系統的姿態穩定是非常不利的,需要進行處理。如果能夠實時測量振動加速度的大小,進一步計算出附加力矩的值,然后通過驅動軸施加主動補償力矩,抵消附加力矩的作用,就能夠保證姿態不變,這就是本文研究的加速度反饋補償的基本原理。如圖2所示,在線振動a的作用下,若載荷姿態不變,則載荷質心處的加速度也需要為a,此時載荷受到的慣性力為ma,該力相對于驅動軸的慣性力矩為maL。若要載荷姿態不變,驅動軸需要提供的主動補償力矩為MmaL=-。這就是加速度反饋補償的控制策略。采用該方法,可以消除基礎線振動對姿態的影響,相當于實現了姿態主動振動抑制。
上述分析僅針對單軸情況,若要將其拓展到多軸系統,需要結合正、逆運動學方法建立三軸耦合的系統動力學方程,根據方程設計三軸控制器。
2.3振動影響分析驗證
為了驗證角振動與線振動對載荷指向精度的影響,本文建立了3種振動下的ADAMS模型,其模型如圖2所示。基礎與載荷之間用旋轉副連接,旋轉軸與z軸平行。模型1中基礎相對慣性坐標系繞過電機軸線方向轉動;模型2中基礎相對慣性坐標系沿x軸方向平動;模型3中基礎末端相對相對轉型坐標系繞y軸轉動。仿真模型中桿長0.5m,角加速度φ為t(rad/s2),平動加速度a為0.5t(m/s2)。仿真結果如圖3所示。(模型1~3中的振動僅對載荷繞z軸的指向精度有影響,因此仿真結果圖中僅提出了X-Y-Z歐拉角的第3姿態角隨時間變化的曲線)
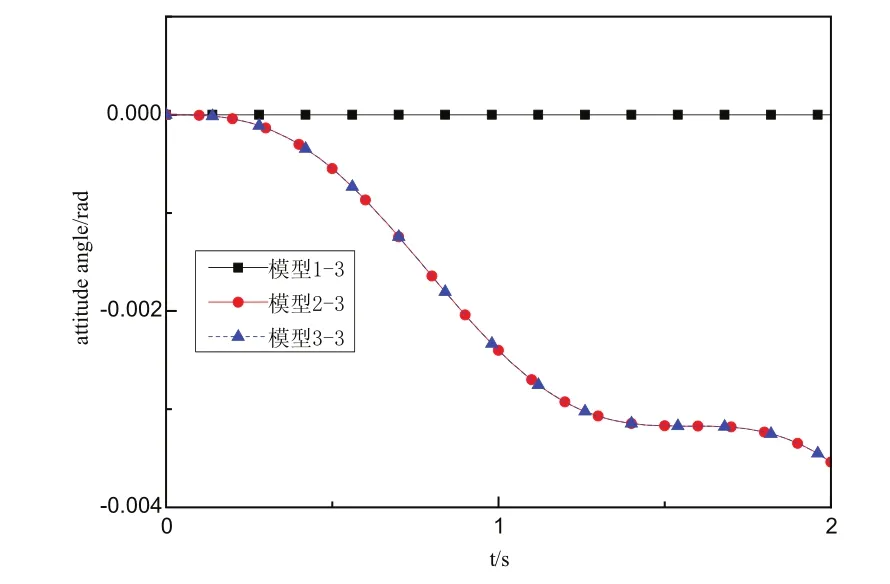
圖3 振動對載荷指向精度影響
由圖3可知,模型1時載荷姿態角保持不變,說明旋轉軸段角振動對載荷姿態角沒影響;模型2時載荷姿態角發生了變化,說明旋轉軸段線振動對載荷姿態角有影響;模型3時載荷姿態角有變化,表明遠離旋轉軸段的基礎角振動(以下簡稱“偏心角振動”)會對載荷姿態角有影響;模型3時載荷姿態角變化與模型2一樣的現象表明偏心角振動對載荷姿態角有影響是因為偏心角振動引起的旋轉軸段的線振動影響了載荷的姿態角。
由上面的結果可知,旋轉軸段的線振動會影響載荷的姿態角,而其角振動不會,而偏心角振動能等效成旋轉軸段的線振動,因此本文后續僅研究了基礎線振動對載荷指向精度的影響。
3 動力學建模與加速度反饋補償
3.1建立連桿坐標系
基礎線振動會對望遠鏡的指向精度有影響,基礎線振動有三個自由度,可以簡化為3個移動副。因此整個模型可以簡化為6自由度串聯機器人模型(3個移動副與3個轉動副),采用D-H建模方法,各連桿坐標系如表1所示,其中坐標系0~坐標系3的初始原點位置都在分布在驅動軸段,坐標系0為整個模型的慣性參考系,坐標系1~3分別表示3個移動連桿,坐標系4~6分別表示3個轉動連桿,其中坐標系5和坐標系6的原點重合。各坐標系z軸方向表示各運動副的運動正方向。

表1 串聯機械臂的D-H參數
在D-H參數下連桿坐標系i相對于連桿坐標系i-1的變換矩陣為:
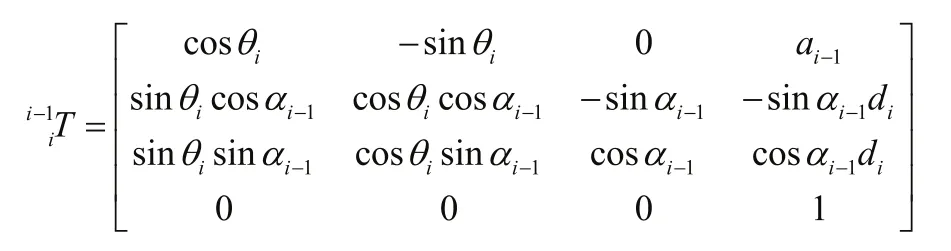
為了計算各連桿受到的合力,需要計算連桿在每個時刻的速度與加速度。速度與加速度的計算可以采用迭代的方法完成,首先計算連桿1的速度與加速度,再計算連桿2的速度與加速度,依此向外計算連桿1~N的連桿的速度與加速度[7]。
1)當連桿i+1關節為轉動關節時:

連桿i+1坐標系原點的線加速度在連桿坐標系i+1下的表達式為:

2)當連桿i+1關節為移動關節時:

連桿i+1坐標系原點的線加速度在連桿坐標系i+1下的表達式為:

無論連桿關節是轉動關節還是移動關節,連桿i的質心速度在連桿坐標系i下的表達式為:

迭代的初始值為:
3.3計算各連桿受到的合力與合力矩
利用牛頓歐拉公式可以計算各連桿受到的合力與合力矩:

3.4計算各關節的驅動力
連桿i受力情況如圖4所示。圖中fi表示連桿i-1作用在連桿i上的力,ni表示連桿i-1作用在連桿i上的力矩。

圖4 連桿受力分析
將作用在連桿i上的所有力相加得到力平衡方程:

將作用在連桿i上的所有力矩相加得到力矩平衡方程:

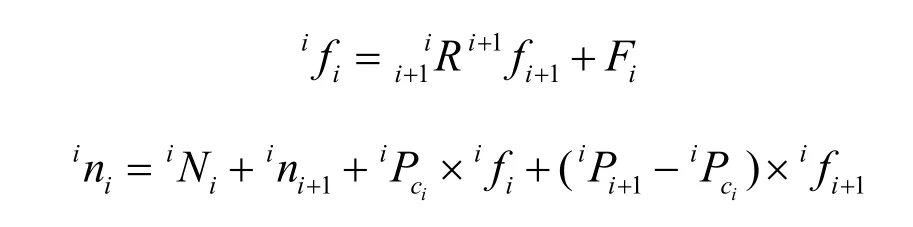
重新整理力與力矩平衡方程,形成相鄰連桿從高序號到低序號排列的迭代關系:利用公式從末端連桿n向內一直迭代到基座。通過連桿對相鄰連桿的作用力在關節坐標系Z向的分量可以得到驅動力(移動關節)或驅動力矩(轉動關節)。

為了推導公式需要對一些條件和參數進行約定,主要約定如下:
1)光學載荷的質量為m,驅動軸系的質量與轉動慣量遠遠小于光學載荷的質量與轉動慣量,因此忽略驅動軸系的質量與轉動慣量;
2)望遠鏡對稱性設計的很好,望遠鏡轉動慣量相對于坐標系6的轉動慣量為,望遠鏡質心相對于坐標系6的位置為<0 0 Pc>;
3)基座線振動擾動加速度分別為Ax、Ay、Az,三軸指向時三個關節轉動角度分別為θ1、θ2、θ3。
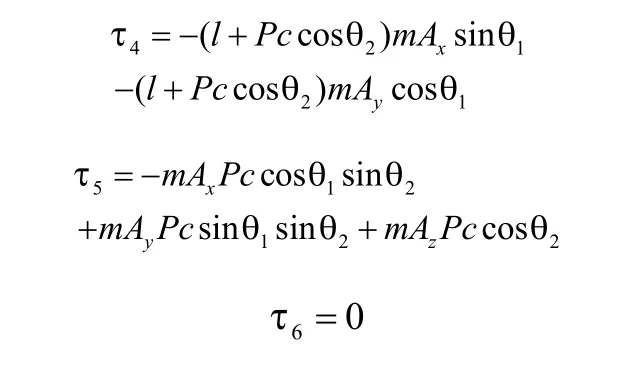
將上面的參數帶入前面的公式并化簡得到驅動軸輸出力分別為:

3.5加速度反饋補償力矩
由3.4節中τ4、τ5、τ6公式可以看出,基礎線振動影響了驅動軸的輸出力矩,將公式中含基礎加速度的項提取出來即為為了消除基礎線振動對光學載荷指向精度影響,保持光學載荷指向穩定性而施加在驅動軸1~3的補償力矩:
4 仿真驗證
本文通過MATLAB/Simulink與ADAMS聯合仿真驗證加速度補償公式的正確性與可行性。MATLAB/ Simulink用來計算在基礎線振動下3個驅動軸的補償力矩,ADAMS用來模擬面向光學載荷的臂式機構,并輸出光學載荷的姿態角變化。圖5為聯合仿真流程圖。
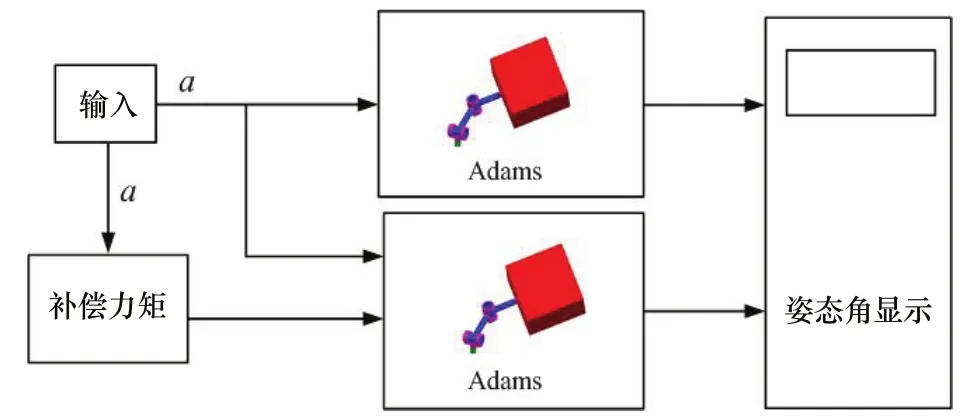
圖5 聯合仿真流程圖
仿真模型分成2部分:模型1是光學載荷在基礎線振動下的姿態變化;模型2是光學載荷在基礎線振動與補償力矩作用下的姿態變化。兩種模型下的輸出均為望遠鏡的姿態角。
仿真模型的主要參數如表2所示。

表2 仿真模型主要參數
4.1不同線振動擾動的仿真
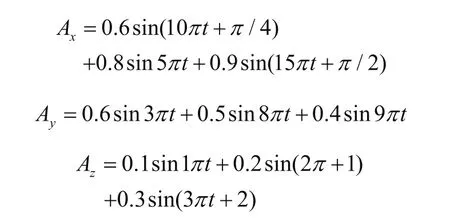
首先對不同線振動擾動下的聯合仿真來驗證反饋補償力矩公式的正確性。仿真模型的構型對應如圖1所示的情況,其驅動軸1~3分別轉動0°、0°、0°,擾動1的線振動擾動加速度為:
擾動2的線振動擾動加速度為:
兩種振動擾動下載荷第一姿態角(其他姿態角規律一樣,因此僅提供了第一姿態角的時變曲線)隨時間變化曲線如圖6所示。由模型1的曲線可以看出,不同擾動對載荷指向精度影響不同,隨著時間的增加,姿態角偏離目標姿態越來越大;由模型2的曲線可以看出,在補償力矩的作用下載荷指向保持不變,說明了反饋補償力矩公式的正確性。

圖6 不同振動擾動下姿態角時變曲線
4.2不同姿態下的仿真
接著通過對不同姿態角構型下的3軸指向機構的聯合仿真來驗證反饋補償力矩公式的正確性。構型2對應如圖5所示的情況,其驅動軸1~3分別轉動60°、-45° 和30°,對應的光學載荷第一姿態角(載荷坐標系相對于絕對坐標系的Z-Y-X歐拉角)為-0.5236rad。
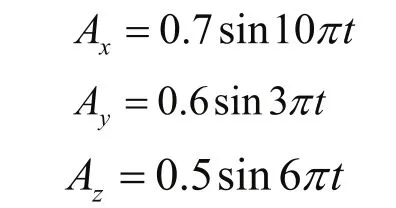
基礎線振動加速度為:
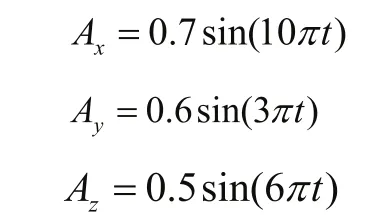
公式中時間單位為s,加速度單位為m/s2。構型2下光學載荷第一姿態角隨時間變化曲線如圖6所示。由圖6與圖7中模型1的曲線可知基礎線振動會對光學載荷的指向精度有影響;由圖6與圖7中模型2的曲線可知光學載荷的姿態角保持不變,兩種構型下加速度反饋法計算的補償力矩消除了線振動對光學載荷指向精度的影響,說明了反饋補償力矩公式的正確性。
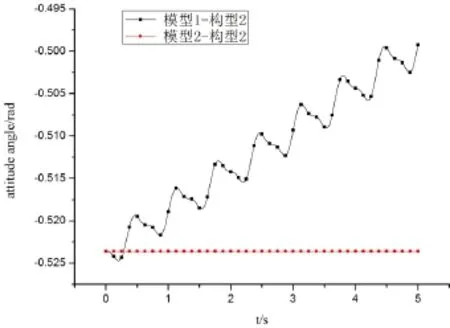
圖7 構型2下姿態角時變曲線
【】【】
5 結論
本文首先分析了基礎角振動與線振動對光學載荷指向精度的影響;接著以面向光學載荷的3自由度臂式機構為研究對象,采用D-H建模方法與牛頓-歐拉方程建立了帶基礎振動的臂式機構的動力學方程,并根據動力學方程得到了加速度反饋補償力矩的計算公式;最后采用
MATLAB/Simulink與ADAMS聯合仿真,驗證加速度補償方法的正確性。在基礎振動與加速度反饋補償力矩的作用下載荷能保持穩定的指向,驗證了加速度反饋補償方法的正確性。
[1] 高衛軍,孫立,王長杰,等.“資源三號”高分辨率主體測繪衛星三線陣相機設計與驗證[J].航天返回與遙感,2012,33(3):25-34.
[2] 王智,李朝輝.月基極紫外相機光機結構設計[J].光學精密工程,2011,19(10):2427-2433.
[3] 姜明,王玉鵬,方偉,等.太陽輻射監測儀跟蹤引導系統的設計[J].電子測量技術,2013,30(9):84-88.
[4] 王智,李朝輝.月基極紫外相機光機結構設計[J].光學精密工程,2011,19(10): 2427-2433.
[5] William R O, Lee D F,Lloyd R P. ATLAST-9.2m:a largeaperture deployable space telescope[C].Space Telescopes and Instrumentation 2010:Optical, Infrared,and Millimeter Wave,Proc. of SPIE,2010,7731:77312M-1-77312M-10.
[6] Dan Lester,Jason Budinoff,Charles Lillie.Large Infrared Telescopes in the Exploration Era-SAFIR[C].UV/Optical/IR Space Telescopes: Innovative Technologies and Concepts III,Proc. of SPIE,2007,6687:66870M-1-66870M-10.
[7] John J.craig,贠超.機器人學導論.3[M].北京:機械工程出版社.2006:137-139.
The acceleration feedback compensation for the arm type pointing towards the optical load
V447
A
1009-0134(2016)08-0013-05
2016-03-25
賀帥(1989 -),男,吉林長春人,研究實習員,碩士,研究方向為空間遙感器力學分析、機器人運動學與動力學建模。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00