基于多級模糊控制的半主動隔震結構減震研究
2016-08-04 07:05:52趙大海李永興李宏男
振動與沖擊 2016年13期
關鍵詞:結構
趙大海, 李永興, 李宏男, 錢 輝
(1. 燕山大學 建筑工程與力學學院,秦皇島 066004;2. 大連理工大學 土木工程學院,大連 116024;3.鄭州大學 土木工程學院, 鄭州 450001)
基于多級模糊控制的半主動隔震結構減震研究
趙大海1, 李永興1, 李宏男2, 錢輝3
(1. 燕山大學 建筑工程與力學學院,秦皇島066004;2. 大連理工大學 土木工程學院,大連116024;3.鄭州大學 土木工程學院, 鄭州450001)
提出了一種基于壓電摩擦阻尼器的新型模糊控制器,對其在半主動隔震結構中的減震效果進行研究。該控制器引入多級式模糊控制策略,其中次級模糊控制器以隔震層的速度和位移為輸入,以阻尼器的電壓為輸出;高級模糊控制器以地震動加速度為輸入,實時調整次級模糊控制的量化因子及比例因子。為檢驗多級模糊控制方法的有效性,對一隔震結構進行數值模擬,并與被動控制和普通模糊控制的減震效果進行對比。數值結果表明:該方法能有效地降低隔震結構的基底位移和上部結構的加速度響應,并且對不同強度的地震動具有良好的適應性。
模糊控制;隔震結構;半主動控制;減震
近年來,基礎隔震已經成為對重要土木工程結構進行減震防護的重要措施。為了降低隔震結構的基底位移,工程中多采用在結構隔震層增加阻尼器的方法[1]。雖然阻尼器能夠在強震中有效地降低隔震結構的基底位移,但是較大的被動阻尼力也會使上部結構的加速度及層間位移出現明顯放大的現象[2-3]。半主動控制作為一種控制方法,能夠通過當前的結構響應實時調整輸出阻尼力的大小,因而較傳統的被動控制更具優越性。而且,相對于主動控制而言,半主動控制不需要輸入過大的能量,就可以達到較理想的控制效果[4]。
在半主動控制策略中,模糊控制由于具有處理非線性、復雜及不穩定系統的優勢,已被國內外學者用于對結構進行控制[5]。但是,單一的模糊控制在應用過程中,具有一定的局限性,通常不能滿足不同類型和強度的地震動作用下結構的抗震要求。為此,國內外眾多學者對模糊控制進行了改進,并將其應用到土木工程的減震控制中。Wang等[6]利用遺傳算法對模糊控制器的參數進行優化;馬勇泉等[7]提出新型磁流變阻尼器,采用模糊神經網絡控制減小鐵路連續梁橋的地震響應;Reigles等[8]采用多個模糊控制器對結構進行減震控制研究;Osman等[9]采用不同的模糊控制策略,對結構的減震性能進行了分析。
壓電摩擦阻尼器是一種新型的半主動摩擦裝置,它利用內嵌于阻尼器中的壓電陶瓷驅動器實時調整阻尼力,以獲得需要的減震效果。近年來,國內外學者開發了多種形式的壓電摩擦阻尼器,并對其進行了試驗和理論方面的研究。趙大海等[10]開發了用于半主動控制的壓電摩擦阻尼器,進行了結構減振控制試驗研究;劉彥輝等[11]設計了雙向滑動壓電摩擦控制裝置,推導了適用于該裝置的半主動控制算法;戴納新等[12]提出了用于隔震裝置的壓電變摩擦阻尼器,通過試驗對阻尼器的性能進行了研究;展猛等[13]對安裝復位型壓電摩擦阻尼器的模型結構進行了減振控制試驗研究。Lu等[14]對安裝壓電摩擦阻尼器的半主動隔震系統的減震性能進行了研究;Ozbulut等[15]提出了兩種控制壓電摩擦阻尼器的控制策略,對安裝阻尼器的隔震結構進行了數值分析;Varela等[16]設計了一種壓電摩擦阻尼器,并進行了性能測試分析。
本文提出一種基于壓電摩擦阻尼器的多級模糊控制策略,次級模糊控制器以隔震層的速度和位移為輸入、以電壓為輸出,實時調整壓電摩擦阻尼器的阻尼力,而高級模糊控制器以地震動的加速度作為輸入,輸出為次級模糊控制器的量化因子及比例因子。通過建立的評價指標,并與被動控制和普通模糊控制的減震效果進行比較,檢驗了提出的多級模糊控制策略的有效性及在不同強度地震動作用下的適應性。
1 半主動隔震結構模型
1.1隔震結構運動方程
隔震結構中,鉛芯橡膠支座(Lead Rubber Bearing,LRB)由于具有良好塑性變形和耗能能力,已被應用于多項工程中。因此,本文考慮一n自由度的LRB隔震結構,在隔震層加入一個壓電摩擦阻尼器后,半主動隔震結構的運動方程可以用下式表示
H(f(t)+Fb(t))
(1)

(2)
式中,A、B和D分別表示為

(3)
1.2LRB計算模型
與疊層橡膠支座不同,LRB隔震支座中加入了鉛芯,提高了耗能能力,其力-變形位移曲線也呈現出一定的非線性滯回特點。為了體現LRB支座的這一特點,本文進行分析時,采用Wen模型來模擬LRB支座的非線性[17],其恢復力可以表示為
fb(t)=αkbxb+(1-α)FyZ
(4)
式中,α為隔震支座屈服前后的剛度比,kb和xb分別為隔震支座的剛度和位移,Fy為隔震支座的屈服強度,Z為一控制滯回位移的無量綱變量,可以通過求解以下一階微分方程得到:
(5)
式中,q為隔震支座的屈服位移,A、β和τ分別為控制隔震支座的滯回曲線的參數,n為控制滯回曲線光滑程度的常數,其值分別為:q=2.5 cm,A=1,β=γ=0.5,n=2。
1.3半主動摩擦阻尼器
與普通摩擦阻尼器不同,作用在半主動摩擦阻尼器中的正壓力N(t)是可變的,其大小可以用下式表示[15]
N(t)=Npre+CpzV(t)
(6)
式中,Npre為作用于壓電變摩擦阻尼器的預緊力;Cpz為與壓電材料有關的系數;V(t)為壓電驅動器的輸入電壓。
普通摩擦阻尼器在工作時存在滑動和靜止兩種狀態[16],根據所處的工作狀態不同,其摩擦力f(t)可以分別用以下兩式表示

(7)

(8)
式中,μ為摩擦因數;sgn(·)為阻尼器滑動速度的符號函數。
壓電變摩擦阻尼器在減震控制時也存在滑動和靜止兩種運動狀態。當壓電變摩擦阻尼器處于滑動狀態時,其運動速度不等于零,此時與普通摩擦阻尼器類似,壓電變摩擦阻尼器的摩擦力f(t)可以通過式(7)進行計算;當其處于靜止狀態時,壓電變摩擦阻尼器的運動速度等于零,此時摩擦力f(t)可以通過式(8)進行計算。
壓電變摩擦阻尼器處于靜止狀態的判斷比較復雜,文獻[15]給出了壓電變摩擦阻尼器處于靜止時的摩擦力近似計算公式,即

(9)
式中,fs是隔震結構上部的慣性力fi和LRB隔震支座的恢復力fr之和的絕對值。fi和fr的近似值可以用以下兩式表示
(10)
fr=m(αkbxb+(1-α)FyZ)
(11)
式中,mi是隔震結構上部各層的質量,mb是隔震層的質量。
2 多級模糊控制策略
控制策略的選擇在很大程度上影響著隔震結構中壓電摩擦阻尼器的性能。由于隔震結構的非線性和輸入地震動的不確定性,傳統的控制方法通常不能取得理想的減震效果。模糊控制把輸入和輸出的關系由復雜的數學問題轉化為簡單的語言關系,所以,模糊控制成為隔震結構中比較常見而有效的控制方法。通常,模糊控制器的設計分為以下幾個步驟:首先,確定控制器的輸入和輸出變量;其次,將輸入值以適當的比例轉換成論域中的數值,并建立相應的隸屬度函數,并在此基礎上,建立一系列由形象化語言形成的模糊控制規則,進而進行邏輯判斷。最后,將得到的模糊數值進行反模糊化,作為系統的輸入值。
本文提出的模糊控制器采取分層式結構,由高級和次級模糊控制器兩部分組成。其中,高級模糊控制器以地震動的加速度值作為輸入,實時調整次級模糊控制的量化因子和比例因子;次級模糊控制根據隔震層速度和位移來調整輸出阻尼力的大小。多級模糊控制系統的流程如圖1所示。

圖1 多級模糊控制流程圖Fig.1 Flow diagram of multi-level fuzzy control
2.1次級模糊控制
次級模糊控制器的作用,是來調節壓電摩擦阻尼器的電壓值,次級模糊控制以隔震層的速度和位移作為輸入,以阻尼器的電壓作為輸出。
在確定模糊控制隸屬度函數的過程中,將輸入變量的模糊論域均調整為 -1~1,并由小到大劃分為七個等級:NL、NM、NS、ZE、PS、PM、PL。類似地,將輸出電壓的模糊論域(0~1 000 V)劃分為5個等級:ZE、S、M、L、VL。輸入和輸出隸屬度函數均采用三角形函數,次級模糊控制的輸入和輸出隸屬度函數如圖2所示。

圖2 次級模糊控制輸入與輸出隸屬度函數Fig.2 Input and output membership functions for sub-level fuzzy control
基于上述建立的隸屬度函數,將輸入和輸出變量進行模糊化,即把變量從物理論域轉換到相應的模糊論域,并建立如表1所示的模糊控制規則。在建立模糊控制規則時,遵循以下原則:如果隔震層的速度和位移正負值相反,說明此時結構正在返回初始狀態,則減小輸出電壓;相反地,如果隔震層的速度和位移正負值相同,說明此時結構正在遠離初始位置,則增大輸出電壓;如果兩者的值都相當小或接近于0,則控制電壓也接近于0,此時壓電摩擦阻尼器基本相當于被動摩擦阻尼器,次級模糊控制的輸入、輸出關系如圖3所示。

表1 次級模糊控制規則

圖3 次級模糊控制的控制面Fig.3 Control surface of the sub-level fuzzy control
2.2高級模糊控制
如前面所述,量化因子用來對模糊控制的輸入變量進行模糊化,將其從物理論域轉換到相應的模糊論域,而比例因子則將輸出值進行反模糊化,將模糊推理值轉化為實際物理量。所以,選擇合適的量化因子及比例因子對模糊控制的減震效果十分重要。過大的量化因子,會使輸入值轉換為模糊論域中的較大值,從而阻尼器輸出過大的阻尼力;反之,過小的量化因子,會使輸入值轉換為模糊論域中的較小值,輸出過低的電壓,壓電摩擦阻尼器的性能得不到充分的發揮。比例因子是將模糊推理值轉化為阻尼器的電壓,比例因子對模糊控制的減震效果同樣有重要影響,過大和過小的比例因子均不能取得理想的控制效果。
本文在次級模糊控制的基礎上建立高級模糊控制, 根據當前地震動的水平實時調整次級模糊控制的
量化、比例因子。通常情況下,傳統模糊控制的輸入論域很難進行準確的定量估計,一般取隔震結構在特定強度地震動下的最大結構響應。然而,當地震動強度發生明顯增強或減弱時,單一固定的模糊論域已經不能滿足要求,無法達到理想的減震效果。比如,當地震動強度增大時,結構響應明顯超出設定的輸入論域,導致壓電摩擦阻尼器長時間處于滿載狀態,不能根據結構振動響應的變化實現有效的智能調控,而且可能會加大上部結構的振動響應。另外,固定的比例因子會導致阻尼器的最大輸出摩擦力不能根據地震動的強度實時做出改變,無法適應地震動強度的變化。由于地震動加速度在一定程度上能反映出地震強度的大小,所以高級模糊控制將地震動加速度作為輸入,實時對次級模糊控制的量化、比例因子進行智能調節,以滿足不同強度地震動下的減震要求。
高級模糊控制以地震動加速度作為輸入,將其論域劃分為三個等級:LOW、MID、HIGH。根據我國《建筑抗震設計規范》中關于設計基本地震加速度值的要求:50年設計基準期超越概率10%的地震加速度設計取值,9度地區為0.40 g。所以,本文將高級模糊控制的輸入論域設為[0,0.4 g],以增強模糊控制的適應性。輸出為次級模糊控制的量化因子Nv和Nd及比例因子Ne,根據隔震結構在不同強度地震動下的仿真結果,確定其論域范圍,分別為:Nv=[1,5],Nd=[3,16],Ne=[0.65,1]。同樣,將其由小到大分為三個等級:S、M、L,輸入和輸出的隸屬度函數均采用三角形函數,如圖4所示。


(a) 輸入地震動(b) 輸出量化因子Nv(c) 輸出量化因子Nd(d) 輸出比例因子Ne圖4 高級模糊控制的輸入與輸出項Fig.4Inputandoutputitemsforhigh-levelfuzzylogiccontrol
根據上述隸屬度函數,建立相應的模糊控制規則,如表2所示。在建立模糊控制規則時,遵循以下原則:當輸入值較大時,說明此時地震動強度較強,結構的振動響應也較大,則應適當降低次級模糊控制的量化因子,防止結構振動響應超出模糊控制的輸入論域,導致阻尼器長時間處于滿載狀態(控制效果接近最大被動控制),此時應適當提高量化因子,以增大壓電摩擦阻尼器可輸出的阻尼力;相反,當輸入值較小時,說明此時地震動強度較低,結構的振動響應也較小,則應適當增大次級模糊控制的量化因子,以減小壓電摩擦阻尼器可輸出的阻尼力。
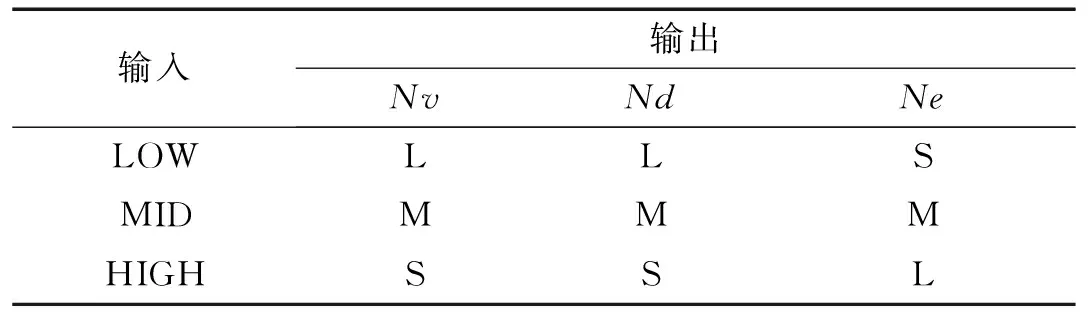
表2 高級模糊控制規則
3 數值計算與分析
3.1隔震結構模型與阻尼器參數
為了檢驗提出的模糊控制方法的有效性,本文以五層隔震結構為例進行計算[18],并建立相應的評價指標對控制效果進行分析。圖5給出了半主動隔震結構的模型,表3給出了相應的參數,LRB支座的參數與1.2節相同,表4給出了壓電摩擦阻尼器的相關參數。

圖5 半主動隔震結構模型Fig.5 Model of semi-active base-isolated structure

結構層質量/kg剛度/(kN·m-1)阻尼/(kN·s·m-1)隔震層68002327.45一層58973373267二層58972909358三層58972862157四層58972495450五層58971905938

表4 壓電摩擦阻尼器參數
3.2數值分析
未加入隔震支座之前,結構的基本自振周期為0.3 s。加入隔震支座后,其基本周期增大到2.5 s,遠離了地震動的卓越周期,所以隔震結構上部的振動響應明顯降低。同時,LRB隔震支座在強震作用下會產生較大的變形,假定容許值為0.15 m。
為了檢驗提出的控制策略對半主動隔震結構的控制效果,本文選用三條典型的地震波,即:El Centro波、Chi-Chi波和Imperial Valley波,其峰值加速度分別為0.319 g、0.23 g和0.16 g,進行數值分析時將峰值加速度均調至0.3 g。本文在此比較了四種工況,即無控、被動控制、普通模糊控制、多級模糊控制。其中,無控指結構隔震層中沒有加入阻尼器的情況;被動控制指結構隔震層中加入被動摩擦阻尼器的情況,取摩擦力分別為10 kN、12 kN和15 kN三種情況;普通模糊控制即具有固定論域的模糊控制,是以隔震層的速度和位移為輸入,以阻尼器的電壓為輸出,隔震層速度及位移的輸入論域分別為[-0.35 m/s,0.35 m/s]和[-0.12 m,0.12 m],阻尼器的電壓的輸出論域為[0,1 000 V],隸屬度函數及模糊控制規則與上述次級模糊控制相同。
為了比較模糊控制策略在不同強度地震作用下的控制效果,本文采用歸一化的評價指標,如表5所示。其中,J1為控制后的最大基底位移與無控時最大基底位移之比,J2為控制后的結構最大加速度與無控時結構最大加速度之比。

表5 性能評價指標
表6給出了無控、被動控制和多級模糊控制時,不同地震動作用下的隔震層峰值位移。從表中可以看出,被動控制時,摩擦阻尼器的阻尼力越大,隔震層位移的減震效果越顯著;多級模糊控制明顯降低了隔震結構的基底位移,三種地震波作用下的減震率分別達到了43.9%、32.4%及31.8%。同時,注意到在Chi-Chi波和Imperial Valley 波作用下,無控隔震結構的峰值基底位移分別達到了0.173 m及0.198 m,超出了隔震層的容許變形,隔震支座會因變形過大失效破壞,而加入阻尼器之后,隔震層的峰值位移均控制在允許范圍內,達到了較好的效果。

表6 隔震層峰值位移
圖6分別給出了被動和多級模糊控制時,不同地震動作用下隔震結構性能評價指標J2的對比情況。從圖中可以看出,被動控制時,隔震結構上部的加速度會出現放大的現象,并且摩擦力越大,上部結構的加速度放大越明顯,相對于被動控制,多級模糊控制策略能夠明顯降低上部結構的加速度響應。比如,Imperial Valley波作用下,被動控制時隔震結構的加速度分別增加了14.2%、17%和22.4%,而多級模糊控制時,上部結構的峰值加速度增大了12.6%。
圖7分別給出了不同地震波作用下,多級模糊控制時的阻尼力輸出時程,其中最大阻尼力分別為13.8 kN、14.1 kN和13.2 kN。


(a) ElCentro波(b) Chi-Chi波(c) ImperialValley波圖6 不同地震波作用下隔震結構峰值加速度比較Fig.6Comparisonsonpeakaccelerationofbase-isolatedstructureunderdifferentearthquakes
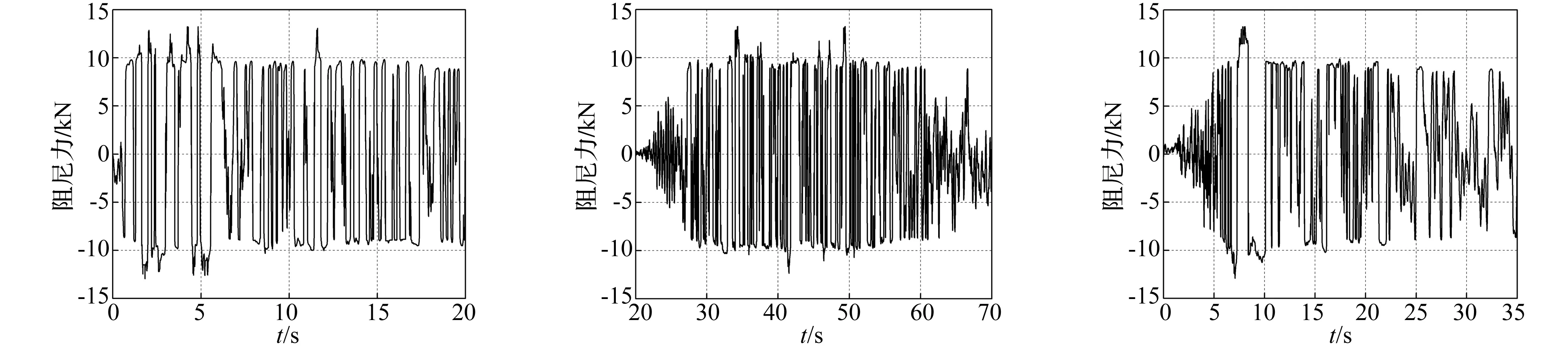

(a) ElCentro波(b) Chi-Chi波(c) ImperialValley波圖7 不同地震波作用下阻尼力輸出時程Fig.7Timehistoryofdampingforceunderdifferentearthquakes
為了檢驗不同強度地震動下多級模糊控制的減震效果,將地震波的峰值加速度分別調整為0.1 g、0.3 g和0.4 g進行計算。限于篇幅,這里僅以Chi-Chi波為例進行說明。將Chi-Chi波的峰值加速度分別調整為0.1 g、0.3 g和0.4 g,計算了普通模糊控制和多級模糊控制的評價指標值,如表7所示。

表7 不同強度地震下評價指標比較
從表中可以看到,地震動強度變化時,采用普通模糊控制時,結構的減震效果發生較大變化。同時,與峰值為0.1 g的地震作用相比,峰值為0.4 g的地震作用下,普通模糊控制的J2值增大了19.5%,而多級模糊控制的J2值僅增大了7.6%。由此可以看出,在不同強度的地震作用下,多級模糊控制的減震效果基本接近,說明多級模糊控制對不同強度的地震動作用具有較強的適應性。

圖8 不同控制策略下電壓時程比較Fig.8 Time history of voltage for different control strategies
圖8分別給出了峰值為0.4 g的Chi-Chi地震波作用下,普通模糊控制和多級模糊控制時半主動摩擦阻尼器的電壓時程。從圖中可以看出,普通模糊控制下,半主動摩擦阻尼器的電壓長時間處于滿載狀態,控制效果接近于被動控制的情況,致使隔震結構的加速度有明顯放大的現象,而多級模糊控制能夠根據隔震結構的反應對輸出電壓進行調節,從而降低了隔震結構的加速度反應。
4 結 論
本文提出了一種基于壓電摩擦阻尼器的新型模糊控制策略,將其應用于半主動隔震系統的減震控制中,并與被動控制和普通模糊控制的減震效果進行了比較,主要得到以下結論:
(1) 通過對不同地震波作用下的減震分析,表明多級模糊控制策略不僅能有效降低隔震結構的基底位移和上部結構的響應,而且使隔震支座的位移限制在容許變形之內。
(2) 地震動強度變化時,采用普通模糊控制時,結構的減震效果變化較大,而多級模糊控制對不同強度的地震動具有較強的適應性。
(3) 普通模糊控制下,半主動摩擦阻尼器的電壓長時間處于滿載狀態,導致隔震結構的加速度有明顯放大的現象,而多級模糊控制能夠根據隔震結構的反應更好地對輸出電壓進行調節,從而降低了隔震結構的加速度。
[1] Alhan C, Gavin H. A parametric study of linear and non-linear passively damped seismic isolation systems for buildings [J]. Engineering Structures, 2004, 26(4):485-497.
[2] Kelly J M. The role of damping in seismic isolation [J]. Earthquake Engineering and Structural Dynamics,1999,28(1): 3-20.
[3] Mazza F, Vulcano A. Nonlinear response of RC framed buildings with isolation and supplemental damping at the base subjected to near-fault earthquakes [J]. Journal of Earthquake Engineering, 2009, 13(5): 690-715.
[4] 胡佳亮, 周麗, 嚴剛. 基于磁流變阻尼器的結構模糊半主動控制實驗研究[J]. 振動與沖擊,2009,28(3):131-135.
HU Jia-liang, ZHOU Li, YAN Gang. Experimental study on fuzzy-semi-active structural control using MR dampers[J]. Journal of Vibration and Shock, 2009, 28(3): 131-135.
[5] Ok S Y, Kim D S, Park K S, et al. Semi-active fuzzy control of cable-stayed bridge using magneto-rheological dampers [J]. Engineering Structures, 2007, 29(5): 776-788.
[6] Wang A P, Lee C D. Fuzzy sliding mode control for a building for a building structure based on genetic algorithms [J]. Earthquake Engineering and Structural Dynamics, 2002, 31(4): 881-895.
[7] 馬涌泉, 邱洪興. 新型磁流變脂阻尼器對鐵路連續梁橋地震響應模糊神經網絡控制[J].振動與沖擊,2015,34(2): 66-73.
MA Yong-quan, QIU Hong-xing. Fuzzy neural network control to suppress seismic response ofcontinuous girder railway bridges using new magneto rheological grease damper[J]. Journal of Vibration and Shock, 2015, 34(2): 66-73.
[8] Reigles D G, Symans M D. Supervisory fuzzy control of a base-isolated benchmark building utilizing a neuro-fuzzy model of controllable fluid viscous dampers [J]. Structural Control and Health Monitoring, 2006, 13(2/3): 724-747.
[9] Ozbulut O E, Bitaraf M, Hurlebaus S. Adaptive control of base-isolated structures against near-field earthquakes using variable friction dampers [J]. Engineering Structures, 2011, 33:3143-3154.
[10] 趙大海, 李宏男. 模型結構的壓電摩擦阻尼減振控制試驗研究[J]. 振動與沖擊, 2011, 30(6): 272-276.
ZHAO Da-hai, LI Hong-nan. Seismic reduction tests of a model structure with piezoelectric friction damper [J]. Journal of Vibration and Shock, 2011, 30(6): 272-276.
[11] 劉彥輝, 杜永峰, 周福霖,等. 基于雙向壓電控制器的帶分布參數體系地震響應控制[J]. 振動與沖擊, 2010, 29(10): 71-76.
LIU Yan-hui, DU Yong-feng, ZHOU Fu-lin, et al. Seismicresponse control for a system with distributed parameters based on bidirectional PZT control device [J]. Journal of Vibration and Shock, 2010, 29(10): 71-76.
[12] 戴納新, 譚平, 周福霖. 新型壓電變摩擦阻尼器的研發與性能試驗[J]. 地震工程與工程振動,2013,33(3):205-214.
DAI Na-xin, TAN Ping, ZHOU Fu-lin. Piezoelectric variable friction damper and its performance experiments and analysis [J]. Journal of Earthquake Engineering and Engineering Vibration, 2013, 33(3): 205-214.
[13] 展猛, 王社良, 朱軍強,等. 安裝復位型壓電摩擦阻尼器模型結構控振試驗研究[J]. 振動與沖擊, 2015, 34(14): 45-50.
ZHAN Meng, WANG She-liang, ZHU Jun-qiang, et al. Vibration control tests of a model structure installed with piezoelectric friction damper with reset function [J]. Journal of Vibration and Shock, 2015, 34(14): 45-50.
[14] Lu L Y, Lin C C, Lin G L, et al. Experiment and analysis of a fuzzy-controlled piezoelectric seismic isolation system [J]. Journal of Sound and Vibration, 2010, 329(11): 1992-2014.
[15] Ozbulut O E, Bitaraf M, Hurlebaus S. Adaptive control of base-isolated structures against near-field earthquakes using variablefriction dampers [J]. Engineering Structures, 2011, 33(12): 3143-3154.
[16] Varela J P, Llera J C. A semi-active piezoelectric friction damper [J]. Earthquake Engineering and Structural Dynamics, 2015, 44(3): 333-354.
[17] Matsagar V A, Jangid R S. Seismic response of base-isolated structures during impact with adjacent structures [J]. Engineering Structures, 2003, 25(10): 1311-1323.
[18] Nagarajaiah S, Narasimhan S. Seismic control of smart base isolated buildings with new semiactive variable damper [J]. Earthquake Engineering and Structural Dynamics,2007,36(6): 729-749.
Seismic reduction of semi-active base-isolated structures based on multi-level fuzzy control
ZHAO Da-hai1, LI Yong-xing1, LI Hong-nan2, QIAN Hui3
(1. School of Civil Engineering and Mechanics, Yanshan University, Qinhuangdao 066004, China;2. School of Civil Engineering, Dalian University of Technology, Dalian 116024, China;3. School of Civil Engineering, Zhengzhou University, Zhengzhou 450001, China)
A new type of fuzzy control controller designed for seismic protection of a base-isolated building with a piezoelectric friction damper was presented here. The controller adopted a multi-level fuzzy control algorithm. The sub-level fuzzy controller was designed to determine the command voltage of the piezoelectric friction damper with inputs of velocity and displacement of base floor. With the input of seismic acceleration, the high-level fuzzy controller adjusted quantization factor and scaling factor of the sub-level fuzzy controller in real-time. The effectiveness of the proposed multi-level fuzzy controller was verified through numerical simulation of a base-isolated structure. The simulation results were compared with those with the traditional fuzzy controller and the passive controller. Numerical results show that the proposed multi-level fuzzy controller can successfully mitigate the displacement of the base floor and the superstructure acceleration response of the structure, and has a good adaptability to ground motions with different intensities.
fuzzy control; base-isolated structure; semi-active control; seismic reduction
10.13465/j.cnki.jvs.2016.13.013
國家自然科學基金(51308487;41402261);河北省自然科學基金(E2014203055);河北省高等學校科學技術研究項目(YQ2013015)
2015-09-16修改稿收到日期:2016-01-20
趙大海 男,博士,副教授,1980年生
李永興 男,碩士生,1991年生
TU352.1
A
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
