伺服位置控制參數的RBF神經網絡自整定研究*
2016-04-15 05:10:57盧少武周鳳星
組合機床與自動化加工技術 2016年3期
關鍵詞:永磁同步電機
周 佳,盧少武,周鳳星
(武漢科技大學 信息科學與工程學院,武漢 430081)
?
伺服位置控制參數的RBF神經網絡自整定研究*
周佳,盧少武,周鳳星
(武漢科技大學 信息科學與工程學院,武漢430081)
摘要:為了獲得滿意的交流伺服系統(tǒng)位置控制性能,需要對伺服系統(tǒng)位置控制參數進行整定。提出一種基于RBF神經網絡的伺服系統(tǒng)位置控制參數自整定方法,該方法利用RBF神經網絡全局尋優(yōu)的優(yōu)點,對伺服系統(tǒng)位置PF控制參數進行整定,從而改善常規(guī)PF控制器的控制效果,最后通過仿真實驗進行了驗證。仿真結果表明:與常規(guī)PF控制方法相比,該方法穩(wěn)定有效,控制精度高,具有更好的控制效果。引入了RBF神經網絡的伺服系統(tǒng),提高了動態(tài)性能,增強了系統(tǒng)穩(wěn)定性。
關鍵詞:伺服系統(tǒng);永磁同步電機;RBF神經網絡;PF參數整定
0引言
永磁同步電機因具有系統(tǒng)響應快,運動平穩(wěn),傳動效率高等優(yōu)點,在數控機床、智能機器人等領域得到廣泛應用,而永磁同步電機伺服系統(tǒng)的控制性能與其控制參數密切相關。在伺服系統(tǒng)三層控制環(huán)節(jié)中,位置環(huán)為外層控制環(huán),其作用是保證系統(tǒng)靜態(tài)精度和動態(tài)跟蹤性能,使伺服系統(tǒng)能穩(wěn)定、高精度運行,且在很多應用中,位置控制性能是伺服系統(tǒng)控制性能的最終體現(xiàn),因此對伺服系統(tǒng)位置控制參數自整定方法進行研究顯得尤為重要[1-3]。
近年來,隨著神經網絡理論的發(fā)展,眾多學者提出將具有自學習能力的神經網絡應用到伺服系統(tǒng)控制研究中。文獻[4]將神經網絡與傳統(tǒng)滑模變結構控制(SMC)相結合,以實現(xiàn)SMC控制器參數的最優(yōu)化自整定,該算法使得控制系統(tǒng)的動靜態(tài)性能更優(yōu),穩(wěn)定性更好。文獻[5]針對液壓伺服控制系統(tǒng)的非線性和時變性因素,提出一種基于BP神經網絡的PID控制器,該控制器結合PID算法和神經網絡的優(yōu)點,具有魯棒性強、超調量小和運行平穩(wěn)等特點。文獻[6]設計出一種基于RBF神經網絡與傳統(tǒng)PID控制相結合的控制器,應用該控制器的伺服系統(tǒng)結構簡單,能適應環(huán)境變化,干擾被有效抑制。
徑向基函數(RBF-Radial Basis Function)神經網絡模擬了人腦中局部調整相互覆蓋接收域的神經網絡結構,具有單隱層的三層前饋網絡。它能以任意精度逼近任意連續(xù)函數,是一種局部逼近的神經網絡[7-8]。本文以永磁同步電機伺服系統(tǒng)位置環(huán)為研究對象,運用基于RBF神經網絡的位置PF控制器對伺服系統(tǒng)位置PF的兩個參數kp、kf進行整定,實現(xiàn)伺服系統(tǒng)位置環(huán)參數自動調節(jié),達到提高伺服系統(tǒng)靜態(tài)精度和動態(tài)跟蹤性能的目的。最后通過仿真實驗驗證了該方法的可行性和穩(wěn)定性。
1基于RBF神經網絡位置PF參數整定
1.1基于RBF的位置PF參數整定過程
位置環(huán)常采用比例調節(jié)器,因為作為連續(xù)跟蹤控制,位置伺服系統(tǒng)不希望位置出現(xiàn)超調與振蕩。同時,為減小運行時的穩(wěn)態(tài)位置跟蹤誤差,保證控制精度,應盡可能提高位置比例增益。而過度增加位置環(huán)控制增益會導致系統(tǒng)的振蕩和失穩(wěn),因此,一般通過前饋復合控制結構改善伺服系統(tǒng)位置環(huán)的動態(tài)響應。本文中伺服系統(tǒng)位置環(huán)控制結構采用了PF控制器。
圖1為伺服系統(tǒng)位置環(huán)控制結構,位置環(huán)控制參數整定過程的參考對象為框內部分,即位置環(huán)被控對象非線性參考模型,以其來尋求穩(wěn)定準確的控制參數整定策略。
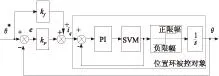
圖1 基于SVM的位置環(huán)參考對象結構
伺服系統(tǒng)位置控制誤差為:
(1)

本文采用增量式PF控制器,可以得到式(2):
(2)
由式(2)進一步推出式(3):
(3)
由式(2)和式(3)可得式(4),即為PF控制算法:
(4)
令PF兩項輸入為:
(5)
為了充分抑制系統(tǒng)響應過程中的超調,我們對伺服系統(tǒng)位置環(huán)控制指標進行了改進:
(6)
上式中,p為懲罰因子,一般大于1,可以根據需要來調節(jié)p的大小,當不需要抑制超調時,p=1。
采用RBF神經網絡可以得到kp,kf的調整量:
(7)
基于RBF神經網絡位置PF控制系統(tǒng)結構如圖2所示。

圖2 基于RBF神經網絡PF控制框圖
1.2RBF神經網絡模型
RBF網絡由輸入到輸出的映射是非線性的,隱含層空間到輸出空間的映射是線性的,可以加快學習速度并避免局部極小問題[9]。
(8)

(9)
1.3RBF神經網絡學習算法
輸出權、節(jié)點中心及節(jié)點基寬參數的迭代算法可根據梯度下降法得到:
(10)
(11)
(12)
(13)
(14)
(15)
式中,η為學習速率,α為動量因子。
Jacobian陣算法為:
(16)
由式(16)可將式(7)進一步化為:
(17)
2仿真實例
為了驗證本文提出的基于RBF神經網絡的伺服系統(tǒng)位置自整定方法相比常規(guī)PF控制方法具有辨識精度高、控制效果更好的優(yōu)點,將基于RBF神經網絡的位置PF控制方法和未整定的位置PF控制方法進行仿真對比。伺服電機的相關參數如表1所示,通過對伺服系統(tǒng)位置環(huán)的數據離線采樣,并對其進行遞推最小二次辨識可得被控對象近似模型為:


(18)



圖4 位置跟蹤誤差

圖5 控制參數自適應整定
由圖4a可知常規(guī)位置PF控制方法位置跟蹤誤差約在0.02s達到最大,然后減小,在約0.05s后達到穩(wěn)定值,穩(wěn)態(tài)位置跟蹤誤差較大,位置跟蹤過程中存在超調;由圖4b仿真結果可以看出,基于RBF神經網絡的位置PF控制方法位置跟蹤誤差約在0.02s達到最大,然后一直減小,在約0.98s后達到穩(wěn)定值,穩(wěn)態(tài)位置跟蹤誤差較小。與常規(guī)位置PF控制方法相比,基于RBF神經網絡的位置PF控制參數自整定方法能明顯減小位置跟蹤誤差,提高控制精度。
3結束語
本文以永磁同步電機伺服系統(tǒng)位置環(huán)為研究對象,結合RBF神經網絡的優(yōu)點,采用基于RBF神經網絡的位置PF控制器對伺服系統(tǒng)位置環(huán)的控制參數進行整定,實現(xiàn)伺服系統(tǒng)位置環(huán)參數自動調節(jié),通過仿真實驗說明基于RBF神經網絡的伺服系統(tǒng)位置PF控制參數自整定方法穩(wěn)定有效,容易實現(xiàn),可以明顯改善常規(guī)PF控制效果。
[參考文獻]
[1] 鄭世祺, 唐小琦, 盧少武, 等. PMSM伺服系統(tǒng)參數自整定研究[J]. 電氣傳動, 2013 , 43(3): 10-13.
[2] 陳鵬展, 唐小琦, 金宏星. 伺服系統(tǒng)速度環(huán)控制參數自整定方法研究[J]. 儀表技術與傳感器, 2010(2): 78-81.
[3] 李兵強, 吳春, 林輝. 基于參考輸入學習的永磁同步電機高精度位置伺服系統(tǒng)[J]. 中國電機過程學報, 2012 , 32(3): 96-102.
[4] 王輝, 萬里瑞, 王才東. 基于智能滑模控制的永磁直線同步電機調速系統(tǒng)[J]. 電機與控制應用, 2014, 41(2): 6-10.
[5] 丁曙光, 吳衛(wèi)平, 桂貴生. 基于神經網絡PID的液壓位置伺服系統(tǒng)控制的研究[J]. 組合機床與自動化加工技術,2009(3): 49-51.
[6] 顧用地, 陸俊. 永磁同步電機伺服系統(tǒng)的RBF神經網絡PID控制[J]. 電氣自動化, 2013, 35(4): 34-36.
[7] 徐慶宏, 戴先中. 基于在線學習RBF神經網絡的汽門開度自適應補償控制方法[J]. 電機與控制學報, 2010, 14(2): 13-19.
[8] 強勇, 凌有鑄, 賈冕茜. 基于RBF神經網絡的永磁同步電機速度控制[J]. 微電機, 2013, 46(4): 53-56.
[9] 劉金坤. 先進PID控制MATLAB仿真[M]. 3版.北京: 電子工業(yè)出版社, 2013.
[10] S Kissling, Ph Blanc, P Myszkorowski,et al. Application of iterative feedback tuning (IFT) to speed and position control of a servo drive [J]. Control Engineering Practice,2009, 17(7): 834-840.
(編輯李秀敏)
Study on Position Control Parameters Auto-tuning of Servo System Based on RBF Neural Network
ZHOU Jia, LU Shao-wu, ZHOU Feng-xing
(College of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081,China)
Abstract:To obtain the satisfactory the position control performance of AC servo system, the position control parameters of servo system should be tuned. This paper presents a position control parameters auto-tuning algorithm of servo system based on RBF neural network, the aim of which is to improve the control effect of traditional PF controller. It is verified through simulation finally. The simulation results show that, compared with traditional PF control algorithm, the proposed algorithm is stable and effective, and has high precision and better control effect. Based on the RBF neural network, the dynamic performance and the stability of the servo system is improved obviously.
Key words:servo system; PMSM; RBF neural network; PF parameter tuning
中圖分類號:TH161;TG659
文獻標識碼:A
作者簡介:周佳(1990—),男,湖北黃岡人,武漢科技大學碩士生,研究方向為伺服控制器和嵌入式,(E-mail)598308367@qq.com。
*基金項目:國家自然科學基金項目(51405349);武漢科技大學科技創(chuàng)新基金項目(14ZRA139)
收稿日期:2015-05-04
文章編號:1001-2265(2016)03-0075-03
DOI:10.13462/j.cnki.mmtamt.2016.03.021
猜你喜歡
現(xiàn)代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
