EPS用永磁同步電機弱磁控制研究
2017-01-16 02:42:50申雪趙林峰黃鶴
汽車工程學報 2016年5期
關鍵詞:永磁同步電機
申雪+趙林峰+黃鶴

摘 要:針對駕駛員在快速操縱方向盤時手感沉重的問題,分析電動助力轉向系統(Electric Power Steering System,EPS),用永磁同步電機的調速原理,將問題的原因歸結為電機的調速范圍有限。提出了以方向盤角速度為判斷依據,低轉速下在轉矩環中進行id=0控制,高轉速下在轉速環中進行弱磁控制的控制策略,并根據某型號永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)給出了具體工程實現方法,進行Matlab/Simulink仿真分析及硬件在環試驗。仿真及試驗結果驗證了所提方案的有效性。
關鍵詞:電動助力轉向系統;永磁同步電機;弱磁控制;方向盤角速度
中圖分類號:U463.44+4文獻標文獻標識碼:A文獻標DOI:10.3969/j.issn.2095-1469.2016.05.09
EPS因具有隨速助力的特性,即當車輛行駛速度較低時,電機提供較大助力,使轉向輕便;當車輛行駛速度較高時,電機提供較小助力,提高車輛行駛安全性,加之其在節能環保方面也較其它形式的助力轉向系統更有優勢[1-3],所以目前被越來越多的車輛采用。PMSM因具有體積小、效率高、運行平滑穩定、轉矩脈動小等優點[4],逐漸取代了有刷直流電機和無刷直流電機,被應用于EPS[5]。
駕駛員在正常情況下操縱方向盤時,PMSM在其額定轉速附近運轉,運行平穩,效率較高。當駕駛員緊急避障而快速操縱方向盤時需要PMSM瞬間提供很大的轉速,但當PMSM達到一定轉速時就不能繼續上升,因此造成快速操縱方向盤時,轉向手感特別沉重。針對這一問題,馬煜乾在文獻[6]中提出了ismax控制和usmax控制兩種弱磁控制策略,但這種公式法屬于開環控制,系統穩定性差,只適合理論分析與仿真研究。呂英超等在研究EPS控制器時,進行了弱磁控制臺架試驗,但沒有給出弱磁控制的具體實現方法[7]。本文在PMSM弱磁擴速的基礎上,以方向盤角速度為判斷依據,在低轉速下應用轉矩環結合電流環的控制策略,在高轉速下應用轉速環結合電流環的控制策略,并進行了Simulink仿真和EPS硬件在環試驗驗證。結果表明,這種轉矩控制和高轉速運行統籌兼顧的控制方法對解決快速操縱方向盤時轉向沉重問題有一定作用。
1 永磁同步電機的數學模型
應用dq軸數學模型進行永磁同步電機分析。首先假設:(1)忽略PMSM鐵心的飽和。(2)不計PMSM的渦流和磁滯損耗。(3)PMSM為對稱的三相正弦波電流。
在上述假設基礎上,PMSM在dq軸坐標系下的電壓方程[8]為:
。
式中:Ld為直軸電感,H;Lq為交軸電感,H;ωr為轉子的電角速度,rad/s;Rs為定子相電阻,Ω;ψf為永磁體產生的磁鏈,Wb;ud為d軸電壓,V;uq為q軸電壓,V;id為d軸電流,A;iq為q軸電流,A。
由于本文中EPS系統使用的助力電機為表貼式PMSM,所以直交軸電感相等,即LdLqL,在電機穩定運轉時,式(1)可改寫為:
。
將式(2)代入到定子電壓方程中可得:
。
式中:us為電機定子電壓,V。
由式(3)可知,當PMSM電壓達到逆變器所能輸出的極限電壓時,電機的實際電流很難跟蹤給定電流,電流調節器飽和[9],繼續升高電機轉速,只能靠調節id和iq來實現,一般是通過增加直軸電流id來實現弱磁擴速。
2 PMSM弱磁控制實例分析
在EPS系統一般使用工況中,電機轉速不會達到額定轉速以上,因此,采用id0的控制策略可使整個PMSM的底層驅動程序更加簡單且易于實現,轉矩平穩,波動較小。在緊急避障等工況下,一般需要的電機轉矩不是很大,但需要較高的電機轉速,此時需要將PMSM的控制策略切換為弱磁控制,從而對PMSM進行擴速。這種id0控制結合弱磁控制的控制策略很好地解決了快速轉向時方向盤沉重的問題。
本文中所使用的PMSM的主要參數為:電機極對數3,直交軸電感LdLqL0.375 mH,磁鏈0.024 5 Wb,額定輸出功率360 W,額定電壓12 V,額定電流60 A,額定轉速960 r/min,最高轉速3 000 r/min。
2.1 執行弱磁控制的判斷條件
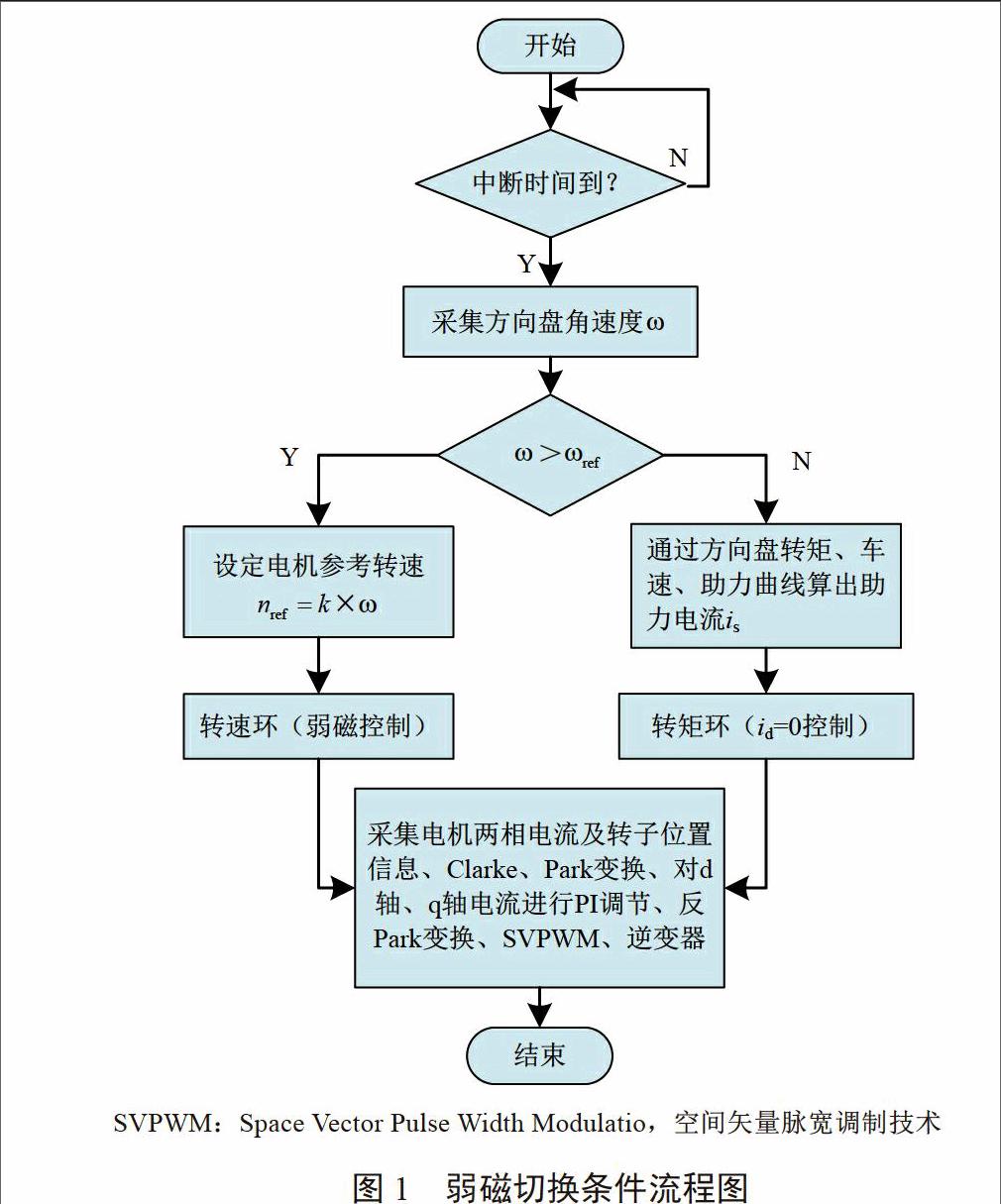
本文控制器軟件設計采用的是EPS決策程序和PMSM驅動程序相結合的方式。如圖1所示,在EPS決策程序中利用方向盤轉角傳感器實時檢測方向盤的角速度信號,如果此信號值大于設定的參考值,系統將執行轉速環中的弱磁控制部分,其中電機參考轉速根據方向盤參考角速度值進行設置。否則系統運行于轉矩環中,并根據方向盤轉矩信號和車速信號通過助力曲線算出助力電流is,執行id0控制方案。
2.2 切換條件中參數的設置
切換條件中需設置方向盤參考角速度ωref。為了能使程序進入轉速環后立刻執行弱磁控制,電機的參考轉速設置為定子電壓us等于umax(,
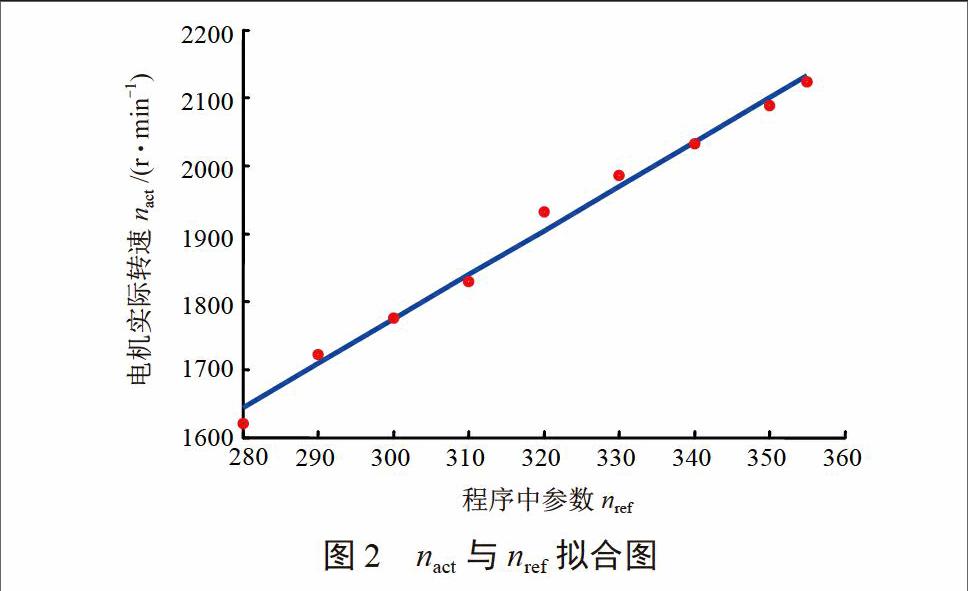
udc為逆變器直流母線電壓)時的電機轉速,又稱為PMSM的轉折轉速。考慮到方向盤角速度與電機轉速之間存在減速比的線性關系,本文方向盤參考角速度ωref設置為PMSM轉折轉速的1?k(k為EPS系統減速比)。在這個前提下,當方向盤角速度大于設定的參考值之后,程序會立刻進入轉速環中的弱磁控制部分。由于實際試驗條件的不同,為了實現PMSM id0控制向弱磁控制更平滑的切換,不能簡單地將電機銘牌上的最高轉速等同于轉折轉速。PMSM的轉折轉速、程序中參數nref與電機實際轉速nact的關系需要在EPS臺架上進行試驗標定。對程序中參數nref賦予不同的值,快速操縱方向盤,采集沒有加入弱磁控制時電機的實際轉速,得到了表1中的數據。由表1可知,在沒有進行弱磁控制的情況下,電機的最高轉速為2 123 r/min,即PMSM的轉折速度為2 123 r/min。本文采用的EPS系統減速比為21,可計算出方向盤參考角速度為2 123?21101 r/min≈10.5 rad/s,即在不進行弱磁控制的情況下,當方向盤角速度達到10.5 rad/s時,電機轉速已經達到極限值,即造成了轉向沉重。由于電機的轉折轉速與其所受負載有關,因此,針對不同的負載情況,為了電機能平滑地切換到弱磁控制模式,有必要重新對轉折轉速進行標定計算。
以nref為橫坐標,nact為縱坐標,將前九組數據進行線性擬合得到圖2所示的線性擬合圖。
根據圖2可以得到:
。
將nact21ω代入式(4)得:
。
式中:ω為方向盤實際角速度,rad/s。
2.3 弱磁控制策略
常見的弱磁控制策略有超前角算法[10]、梯度下降法[11]、查表法[12]等,但上述算法較為復雜,計算量大,實現困難。本文采用電壓負反饋的弱磁控制方法,算法簡單,魯棒性好。負反饋弱磁控制的框圖如圖3所示,其原理為由電機轉子位置傳感器計算出來的轉速與設定的電機參考轉速之差通過比例積分(Proportion and Integration,PI)調節來控制電機定子電流(電機的參考轉速通過式5由方向盤實際轉速而定),同時由電流環PI調節器引出ud、uq,即可得電機定子電壓us與umax之差,并通過PI調節電機定子電流分量id。當電機轉速在轉折轉速以下時,由于限幅環節的作用id0,電機執行id0控制;當電機轉速在轉折轉速以上時,PI調節器輸出負的?id,弱磁控制開始起作用。為了防止永磁體永久退磁,必須對id的最大值進行限幅,最大值為0,最小值為PMSM允許的最小弱磁電流-idmax,且-idmax為-?Ld。
3 仿真分析
為了驗證本文提出的弱磁控制策略的有效性,在Matlab/Simulink中搭建了仿真模型,如圖4所示,主要包括駕駛員模型、機械轉向系統模型、控制器模型和PMSM模型。控制器模塊中的弱磁控制策略根據圖3搭建。該模型中輸入信號為方向盤轉角和車速,采用階躍信號作為方向盤轉角輸入來模擬快速操縱方向盤。由于緊急避障一般在車速較高時才會發生,所以車速定為60 km/h。圖5給出了有無弱磁控制情況下方向盤轉矩T、電機轉速n、d軸參考電流idref和d軸實際電流id。
由圖5a可以看出,在快速操縱方向盤后,加入了弱磁控制后方向盤轉矩的幅值明顯小于id0控制策略的方向盤轉矩,而且對方向盤抖動問題也起到了一定改善作用。由圖5b可知,在快速操縱方向盤后,沒有加入弱磁控制的PMSM轉速并不能持續上升,而加入弱磁控制的PMSM轉速得到了明顯提升,滿足了快速操縱方向盤時對電機轉速的需求。為了突出表達弱磁控制過程中實際直軸電流對參考直軸電流的追蹤效果,將圖5c橫坐標進行局部放大處理。可以看出,d軸實際電流id很好地跟蹤上了d軸參考電流idref,說明加入的弱磁控制策略的確起到了作用。
4 硬件在環試驗
為了驗證本文提出的弱磁控制策略在實踐中的使用效果,在EPS硬件在環試驗臺上對其進行了驗證。在環試驗中的EPS硬件主要由機械轉向系統、伺服電機、蓄電池、自主開發的EPS控制器(控制器主控芯片為STM32F103ZET6)、轉角傳感器、PMSM、CAN信號采集設備等組成,如圖6所示。
在試驗中快速操縱方向盤,采集方向盤轉角信號θ、方向盤轉矩T、電機轉速n以及弱磁控制時的d軸參考電流idref和d軸實際電流id,試驗結果如圖7所示。
由圖7a和圖7b可知,在有弱磁控制的情況下電機轉速可以達到2 739 r/min,對應的方向盤轉矩為6.61 N·m;而在沒有弱磁控制的情況下,電機轉速僅能達到2 123 r/min,對應的方向盤轉矩為7.91 N·m,并且從兩種情況下都可以看出在電機轉速達到最高時,方向盤轉矩也達到最大值,這說明在快速操縱方向盤時電機轉速對駕駛員手感產生了影響。由圖7c可知,弱磁控制時直軸實際電流id對參考電流idref具有很好的跟蹤效果,說明弱磁控制起到了作用。
5 結論
本文在分析EPS系統中快速操縱方向盤轉向沉重問題的基礎上提出了一種弱磁控制方案,即以方向盤角速度為判斷依據,當其超出預先設定的參考值時,執行速度環中的弱磁控制;否則,繼續留在轉矩環中執行id=0控制。基于仿真分析和硬件在環試驗得到以下結論。
(1)該控制策略可以使電機轉速提高29%,能有效跟蹤駕駛員快速操縱方向盤時的轉速輸入。
(2)對駕駛員快速操縱方向盤時導致的抖動問題有一定的改善作用。
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
科技與創新(2016年1期)2016-01-19 16:54:21