基于位置域頻率和相位辨識的永磁直線電機(jī)推力波動(dòng)抑制技術(shù)研究*
2016-04-15 05:18:59張彥龍杜文華
組合機(jī)床與自動(dòng)化加工技術(shù) 2016年3期
張彥龍,趙 飛,張 馳,杜文華
(1.中北大學(xué) 機(jī)械與動(dòng)力工程學(xué)院,太原 030051;2.中國科學(xué)院寧波工業(yè)技術(shù)研究院(籌) 先進(jìn)制造技術(shù)研究所,浙江 寧波 315201)
?
基于位置域頻率和相位辨識的永磁直線電機(jī)推力波動(dòng)抑制技術(shù)研究*
張彥龍1,趙飛2,張馳2,杜文華1
(1.中北大學(xué) 機(jī)械與動(dòng)力工程學(xué)院,太原030051;2.中國科學(xué)院寧波工業(yè)技術(shù)研究院(籌) 先進(jìn)制造技術(shù)研究所,浙江 寧波315201)
摘要:推力波動(dòng)是永磁直線電機(jī)固有的內(nèi)部擾動(dòng),嚴(yán)重影響直線電機(jī)的動(dòng)態(tài)精度。基于推力波動(dòng)特性辨識結(jié)果設(shè)計(jì)前饋控制器是實(shí)現(xiàn)推力波動(dòng)抑制的重要手段。首先分析了推力波動(dòng)特性,基于位置域頻率和初相位信息建立了推力波動(dòng)數(shù)學(xué)模型。電機(jī)在不同速度下運(yùn)行時(shí)基于遺傳算法辨識方法分別確定實(shí)驗(yàn)直線電機(jī)的推力波動(dòng)模型參數(shù),并設(shè)計(jì)前饋控制器,實(shí)現(xiàn)直線電機(jī)的推力波動(dòng)抑制。仿真和實(shí)驗(yàn)結(jié)果表明,推力波動(dòng)模型準(zhǔn)確描述了被測電機(jī)的推力特性,基于模型辨識結(jié)果設(shè)計(jì)的前饋控制器有效地降低了推力波動(dòng)引起的系統(tǒng)速度波動(dòng)。
關(guān)鍵詞:永磁同步直線電機(jī);前饋補(bǔ)償;推力波動(dòng);遺傳算法
0引言
永磁同步直線電機(jī)是進(jìn)給系統(tǒng)實(shí)現(xiàn)高加速度高精度運(yùn)動(dòng)的關(guān)鍵基礎(chǔ)部件。直線電機(jī)簡化了進(jìn)給系統(tǒng)的傳動(dòng)鏈,消除了傳動(dòng)間隙,減少了摩擦,提高了運(yùn)行速度和加速度,擴(kuò)展了控制帶寬范圍,促進(jìn)了高速高精密加工的發(fā)展。然而,直驅(qū)電機(jī)并非完美無缺,直線電機(jī)端部磁場的畸變影響到行波磁場的完整性,使電機(jī)損耗增加,推力減小,而且存在較大的推力波動(dòng)。直線電機(jī)由于不需要中間機(jī)械轉(zhuǎn)換環(huán)節(jié),使得其較旋轉(zhuǎn)電機(jī)更容易受到外界干擾。推力波動(dòng)是影響直線電機(jī)性能的主要因素之一。引起推力波動(dòng)的原因有齒槽效應(yīng)、端部效應(yīng)、法向吸引力所引起的摩擦攝動(dòng)以及驅(qū)動(dòng)電流的非正弦和反電動(dòng)勢的非正弦所引起的紋波推力等因素[1-4]。推力波動(dòng)會使電機(jī)在運(yùn)行時(shí)出現(xiàn)抖動(dòng)、噪聲并且影響電機(jī)運(yùn)行的平穩(wěn)性,因此為了提高直線電機(jī)的驅(qū)動(dòng)性能,必須對推力波動(dòng)進(jìn)行抑制。
針對直線電機(jī)的推力波動(dòng)可以從電機(jī)設(shè)計(jì)角度和控制角度來進(jìn)行抑制。電機(jī)的設(shè)計(jì)角度可以通過將齒槽結(jié)構(gòu)優(yōu)化、對動(dòng)子鐵心結(jié)構(gòu)優(yōu)化和對磁極結(jié)構(gòu)優(yōu)化實(shí)現(xiàn)一定程度的抑制[5-6]。通過優(yōu)化電機(jī)設(shè)計(jì)的方法,可以降低永磁同步直驅(qū)電機(jī)的推力波動(dòng)。然而,電機(jī)設(shè)計(jì)并不能完全消除推力波動(dòng),需通過控制來彌補(bǔ)。在控制角度,利用現(xiàn)代控制技術(shù),提高系統(tǒng)擾動(dòng)抑制能力是實(shí)現(xiàn)推力波動(dòng)的主要趨勢。文獻(xiàn)[7-9]通過迭代學(xué)習(xí)的方法對推力波動(dòng)進(jìn)行補(bǔ)償,但該方法增加了系統(tǒng)的復(fù)雜度和運(yùn)算量,使得實(shí)時(shí)控制系統(tǒng)的使用成本大幅增高。文獻(xiàn)[10] 基于擾動(dòng)觀測器的推力波動(dòng)補(bǔ)償控制需要額外的系統(tǒng)資源,同樣造成成本提升。文獻(xiàn)[11]通過外部電機(jī)拖動(dòng)實(shí)驗(yàn)直線電機(jī)勻速運(yùn)動(dòng)的方式測得了推力波動(dòng)中的齒槽力和端部力,并對其進(jìn)行了補(bǔ)償,但該方法需要額外的電機(jī)、力傳感器,且不能測出推力波動(dòng)中的紋波力。為了同時(shí)獲得齒槽力、端部力、紋波力和法向吸引力所引起的摩擦攝動(dòng),本文通過驅(qū)動(dòng)器使電機(jī)勻速運(yùn)行,通過測量輸出電流獲取電機(jī)的推力波動(dòng)。首先分析了推力波動(dòng)特性,基于位置頻率和初相位信息建立了推力波動(dòng)數(shù)學(xué)模型。在多組運(yùn)動(dòng)速度狀態(tài)下,基于遺傳算法辨識方法分別辨識出直線電機(jī)推力波動(dòng)的模型參數(shù),以此設(shè)計(jì)前饋控制器,實(shí)現(xiàn)直線電機(jī)的推力波動(dòng)抑制。
1推力波動(dòng)的建模及補(bǔ)償方法
1.1推力波動(dòng)的建模
在id=0矢量控制方式下,電機(jī)的推力電流和電機(jī)的推力成正比。當(dāng)電機(jī)運(yùn)行時(shí),其受力情況可表示為式(1)、式(2):
F=ma+Ffriction+Fripple
(1)
F=Kiq
(2)
其中:F為電機(jī)電磁推力;m為動(dòng)子質(zhì)量;a為電機(jī)的加速度;Ffriction為摩擦力;Fripple為推力波動(dòng);K為電機(jī)力常數(shù);iq為經(jīng)過坐標(biāo)變換后電機(jī)的q軸電流。
永磁直線電機(jī)的推力波動(dòng)主要由齒槽力、端部力以及紋波力等引起。從理論上對它們進(jìn)行理論推導(dǎo)后發(fā)現(xiàn),這些影響因素都可以表示成同電機(jī)初級所處的位置和電機(jī)的運(yùn)行速度有關(guān)正弦函數(shù)組合的形式。故在某一速度下的推力波動(dòng)模型可設(shè)為:
(3)
其中,l為正整數(shù);Ai為第i次諧波的幅值;fi為第i次諧波的頻率;x為電機(jī)初級所處的位置;φi為第i次諧波的初相位。不同速度時(shí),推力波動(dòng)模型中的幅值和相位略有差別。
由式(3)可知,推力波動(dòng)是關(guān)于電機(jī)運(yùn)動(dòng)位移的函數(shù),同電機(jī)運(yùn)行的時(shí)間并非直接相關(guān)。若電機(jī)勻速運(yùn)行,則很容易建立起電機(jī)運(yùn)行的位移和時(shí)間的關(guān)系。這種情況下,電機(jī)的受力情況為:
F=Ffriction+Fripple
(4)
建模時(shí)應(yīng)首先確定其正弦函數(shù)的頻率,快速傅里葉變換是一種簡單而有效的求取信號特征頻率的方法。電機(jī)勻速運(yùn)行時(shí)易于建立起電機(jī)運(yùn)行的位移和時(shí)間的關(guān)系,因此可以求出以位置為變量的特征頻率,此時(shí)頻率的單位是mm-1。
1.2基于遺傳算法的模型參數(shù)的辨識
為了獲得推力波動(dòng)具體的數(shù)學(xué)表達(dá)式,需要對模型中的參數(shù)Ai和φi進(jìn)行參數(shù)辨識。遺傳算法由于具有較強(qiáng)的全局搜索能力,當(dāng)需要辨識的參數(shù)較多時(shí),不易陷入局部最優(yōu)解。故本文采用遺傳算法辨識模型參數(shù)。取待辨識的推力波動(dòng)參數(shù)向量為個(gè)體,遺傳算法的每步迭代得到推力波動(dòng)參數(shù)的辨識值為:
(5)

則由下式得到相應(yīng)的推力波動(dòng)辨識值:
(6)

遺傳算法的目標(biāo)函數(shù)和個(gè)體適應(yīng)度分別取為:
(7)
fm=Cmax-J
(8)

1.3推力波動(dòng)前饋控制補(bǔ)償

圖1 系統(tǒng)結(jié)構(gòu)框圖
當(dāng)控制系統(tǒng)誤差具有可預(yù)測性時(shí),前饋控制是實(shí)現(xiàn)誤差消減的直接而有效的方法。直驅(qū)電機(jī)的推力波動(dòng)具有位置周期特性,因此,可以采用基于參考模型前饋控制的方式進(jìn)行抑制。由于各頻率分量所對應(yīng)的幅值和相位隨著速度變化而變化,需對多個(gè)速度情況下的推力波動(dòng)模型進(jìn)行上述運(yùn)算,辨識出每一速度下的模型參數(shù),計(jì)算出各頻率下的幅值和相位同速度的關(guān)系式,即Ai=Ai(v)和Φi=Φi(v),帶入式(3)得到推力波動(dòng)模型。通過指令速度即可算得此速度下的Ai和Φi,進(jìn)而求得對應(yīng)的推力波動(dòng)。以此設(shè)計(jì)的前饋控制器系統(tǒng)框圖如圖1所示。
2永磁同步直線電機(jī)推力波動(dòng)補(bǔ)償及仿真
本文在Matlab/Simulink環(huán)境中建立速度閉環(huán)和電流閉環(huán)控制系統(tǒng),仿真對象為永磁同步直線電機(jī),其參數(shù)如表1 所示。根據(jù)上述分析結(jié)果,推力波動(dòng)可以表示為一系列正弦函數(shù)的組合。假設(shè)電機(jī)在速度為300mm/s情況下運(yùn)行,推力波動(dòng)最大值為電機(jī)連續(xù)推力的4.81%。按照式(3),直線電機(jī)推力波動(dòng)模型參數(shù)如式(9)所示。在Simulink環(huán)境下,構(gòu)建直線電機(jī)速度環(huán)和電流環(huán)控制模型,并將論文提出的前饋控制方法加入到系統(tǒng)中,如圖1所示,前饋控制器模型參數(shù)通過論文1.2節(jié)辨識方法進(jìn)行辨識,辨識結(jié)果分別為A1=165.9113、A2=288.189、Φ1=1.3949和Φ2=2.305。仿真結(jié)果如圖2所示。當(dāng)系統(tǒng)無前饋控制時(shí),系統(tǒng)推力波動(dòng)范圍為近1000N,當(dāng)系統(tǒng)加入前饋后,推力波動(dòng)幾乎為0。由于輸出電流受噪聲影響和參數(shù)辨識誤差的存在,使得系統(tǒng)推力波動(dòng)并不能完全被抑制。從仿真結(jié)果可以看出,補(bǔ)償后的推力波動(dòng)范圍和穩(wěn)態(tài)速度波動(dòng)較補(bǔ)償前被明顯抑制,驗(yàn)證了電流環(huán)加入補(bǔ)償電流以抑制推力波動(dòng)的可行性。

表1 電機(jī)參數(shù)
Fripple=166sin(2π*0.05x+1.4)+
288sin(2π*0.1x+2.3)
(9)


圖2 補(bǔ)償前后的推力波動(dòng)曲線和穩(wěn)態(tài)速度曲線
3永磁直線電機(jī)推力波動(dòng)補(bǔ)償實(shí)驗(yàn)及結(jié)果討論
3.1實(shí)驗(yàn)配置

圖3 實(shí)驗(yàn)配置
論文所提出的方法被應(yīng)用于一臺永磁同步直線電機(jī)實(shí)驗(yàn)臺上。該實(shí)驗(yàn)臺直線電機(jī)采用7極6槽結(jié)構(gòu),其它相關(guān)參數(shù)如表1所示。位置傳感器采用發(fā)格LS487光柵尺。試驗(yàn)臺控制器采用dSPACE1103控制仿真系統(tǒng)搭建,驅(qū)動(dòng)器采用Copley Xenus型驅(qū)動(dòng)器。整個(gè)永磁同步直驅(qū)電機(jī)伺服系統(tǒng)平臺如圖3所示。
3.2伺服電機(jī)推力測試及分析技術(shù)

圖4 推力波動(dòng)信號的頻譜
本文采用的id=0的矢量控制方式中,由于伺服電機(jī)運(yùn)行時(shí)的推力和推力電流成正比,故測出電機(jī)輸出電流值即可得電機(jī)推力值。調(diào)節(jié)Copley驅(qū)動(dòng)器使電流閉環(huán),通過Copley對電機(jī)的輸出電流進(jìn)行采樣并記錄,而電機(jī)輸出電流信號中的直流分量為電機(jī)所受的摩擦力。例如當(dāng)控制器閉環(huán)并且使電機(jī)工作在20mm/s時(shí),將去除直流分量后的電流信號乘以電機(jī)電磁力常數(shù)得到推力波動(dòng)信號如圖5a所示。對該信號按位置進(jìn)行FFT分析,得到其頻率特性,如圖4所示,由此可確定推力波動(dòng)數(shù)學(xué)表達(dá)式如式(10)所示。
(10)

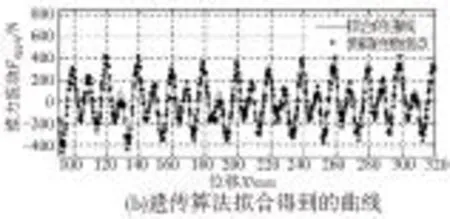
圖5 實(shí)驗(yàn)測得的推力波動(dòng)曲線和遺傳算法擬合的曲線
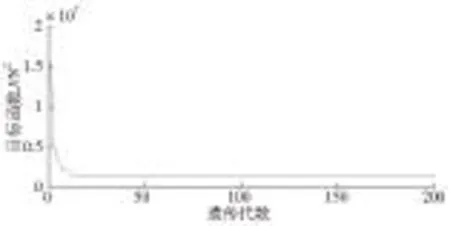
圖6 目標(biāo)函數(shù)J的優(yōu)化過程
通過遺傳算法即可辨識出模型中的Ai,Φi,其擬合曲線和目標(biāo)函數(shù)J的優(yōu)化過程分別如圖5b和圖6所示。由上面的分析可知,不同速度下,相同頻率分量所對應(yīng)的幅值和初相位并非相同,需在多種不同速度下進(jìn)行推力波動(dòng)參數(shù)辨識。本文共進(jìn)行102次實(shí)驗(yàn)測量,同一速度進(jìn)行3次重復(fù)實(shí)驗(yàn)。最后經(jīng)計(jì)算得到各頻率下的幅值和相位同速度的關(guān)系式。結(jié)果顯示,3次重復(fù)試驗(yàn)所獲得的幅值和相位基本重合。同一速度值下的相位隨運(yùn)動(dòng)方向不同略有差別。這是由于隨著速度的增加,iq和反電動(dòng)勢增加,而輸入的電流往往并非理想的正弦電流,導(dǎo)致電磁推力中存在高次諧波,進(jìn)而影響到推力波動(dòng)的初相位。
3.3結(jié)果討論
在MATLAB/simulink中搭建電機(jī)的速度閉環(huán)控制器,并將其加載到dSPACE1103中,將推力波動(dòng)轉(zhuǎn)換成對應(yīng)的電流值加入到電流環(huán)控制器中,以對推力波動(dòng)進(jìn)行抑制。當(dāng)電機(jī)運(yùn)行在300mm/s時(shí),其補(bǔ)償前后的推力波動(dòng)曲線和速度曲線如圖7所示。
從圖7a可以看到,在沒有推力波動(dòng)補(bǔ)償情況下,直線電機(jī)運(yùn)行時(shí)受推力波動(dòng)的影響比較大,加入推力波動(dòng)補(bǔ)償后推力波動(dòng)被明顯抑制。由圖7b可知,沒加入推力波動(dòng)前饋補(bǔ)償時(shí)電機(jī)運(yùn)行的速度波動(dòng)范圍為3.733%。對直線電機(jī)進(jìn)行推力波動(dòng)補(bǔ)償后,其運(yùn)行的速度波動(dòng)范圍為1.633%。從實(shí)驗(yàn)結(jié)果可以看出,補(bǔ)償后速度的波動(dòng)較未補(bǔ)償降低55%以上,推力波動(dòng)的影響得到了明顯削弱,可見本文提出的辨識方法是可行的。應(yīng)當(dāng)指出的是,電機(jī)在運(yùn)行時(shí)受噪聲影響,使得推力的波動(dòng)并不能完全被抑制。同時(shí),電磁推力常數(shù)隨著位置變化也會略有不同,導(dǎo)致電磁推力和q軸電流并非呈嚴(yán)格的正比關(guān)系,使得辨識出的推力波動(dòng)數(shù)學(xué)模型存在誤差。論文的下一步工作為將電磁推力常數(shù)的變化也加入推力波動(dòng)的辨識中并降低電機(jī)運(yùn)行時(shí)的噪聲影響,使得補(bǔ)償效果更好。


圖7 補(bǔ)償前后的推力波動(dòng)曲線和穩(wěn)態(tài)速度波形
4結(jié)論
針對推力波動(dòng)對直驅(qū)伺服系統(tǒng)的影響,本文建立了基于推力波動(dòng)數(shù)學(xué)模型的前饋補(bǔ)償策略。首先將測得的推力波動(dòng)信號通過FFT提取信號中的特征頻率,然后采用遺傳算法推力波動(dòng)辨識出推力波動(dòng)模型中的參數(shù),最后根據(jù)推力波動(dòng)模型設(shè)計(jì)前饋控制器。通過在一臺永磁同步直驅(qū)電機(jī)的實(shí)驗(yàn)研究表明,該方法明顯抑制了直線電機(jī)穩(wěn)態(tài)速度波動(dòng)。同時(shí)該方法實(shí)現(xiàn)過程較為簡單,不需要額外的實(shí)驗(yàn)設(shè)備和傳感器,前饋補(bǔ)償器不復(fù)雜且運(yùn)算量小,實(shí)時(shí)性強(qiáng)。
[參考文獻(xiàn)]

[2]Kim I, Nakazawa N, Kim S, et al. Compensation of torque ripple in high performance BLDC motor drives[J]. Control Engineering Practice, 2010, 18(10): 1166-1172.
[3]夏加寬, 沈麗, 彭兵, 等. 齒槽效應(yīng)對永磁直線伺服電機(jī)法向力波動(dòng)的影響[J]. 中國電機(jī)工程學(xué)報(bào), 2015,35(11):2847-2853.
[4]Liu C T, Hwang C C, Li P L, et al. Design Optimization of a Double-Sided Hybrid Excited Linear Flux Switching PM Motor With Low Force Ripple[J].IEEE Transactions on Magnetics, 2014,50(11):1-4.
[5]王光輝, 陳杰, 蔡濤, 等. 多目標(biāo)分解隨機(jī)粒子群優(yōu)化算法及其在直線電機(jī)優(yōu)化設(shè)計(jì)中的應(yīng)用[J].控制理論與應(yīng)用,2013,30(6):693-701.
[6]Gebregergis A, Chowdhury M H, Islam M S, et al. Modeling of Permanent-Magnet Synchronous Machine Including Torque Ripple Effects[J]. IEEE Transactions on Industry Applications, 2015,51(1):232-239.
[7]Zhao S, Tan K K. Adaptive feedforward compensation of force ripples in linear motors[J]. Control Engineering Practice, 2005, 13(9): 1081-1092.
[8]王福忠, 張利敏. 基于迭代算法的 PMLSM 推力波動(dòng)抑制策略[J]. 計(jì)算機(jī)仿真, 2014, 31(5): 276-278.
[9]Kalaivani L, Subburaj P, Iruthayarajan M W. Speed control of switched reluctance motor with torque ripple reduction using non-dominated sorting genetic algorithm (NSGA-II)[J]. International Journal of Electrical Power & Energy Systems, 2013, 53: 69-77.
[10]甄文喜, 戴躍洪, 唐傳勝,等. 永磁同步直線電機(jī)伺服系統(tǒng)負(fù)載擾動(dòng)建模與抑制[J]. 組合機(jī)床與自動(dòng)化加工技術(shù), 2013(2):7-10.
[11]林家春, 李偉, 趙彤, 等. 永磁直線同步電動(dòng)機(jī)推力波動(dòng)抑制策略[J]. 控制理論與應(yīng)用, 2007,24(3):449-452.
(編輯李秀敏)
Research of Force Ripple Compensation for Permanent Magnet Synchronous Linear Motor Based on Frequency and Phase Identification
ZHANG Yan-long1,ZHAO Fei2,ZHANG Chi2,DU Wen-hua1
(1.School of Mechanical and Power Engineering, North University, Taiyuan 030051, China;2. Institute of Advanced Manufacturing Technology, Ningbo Institute of Industrial Technology CAS, Ningbo Zhejiang 315201, China)
Abstract:The thrust fluctuation which affects the dynamic precision of the linear motor seriously is inherent and internal disturbance in permanent magnet synchronous linear motor. The feedforward controller designed according to the results of thrust fluctuation characteristic identification is an important means to realize the force ripple suppression. This paper firstly analyze the characteristics of the force ripple and build the mathematic model of the trust fluxtuaion based on the position frequency and initial phase information. Model parameters are identified through genetic algorithm method, The feedforward controller is designed to achieve the suppression of the force ripple. Simulation and experimental results show that the force ripple model accurately describes the characteristics of the tested linear motor. And the designed feedforward controller based on model identification results effectively reduce the velocity fluctuation.
Key words:permanent magnet synchronous linear motor; feedforward compensation; force ripple; genetic algorithm
中圖分類號:TH39;TG506
文獻(xiàn)標(biāo)識碼:A
作者簡介:張彥龍(1990—),男,黑龍江齊齊哈爾人,中北大學(xué)碩士研究生,研究方向?yàn)殡姍C(jī)控制, (E-mail)zhangyanlong@nimte.ac.cn;通訊作者:張弛(1978—),男,河南扶溝縣人,中科院寧波工業(yè)技術(shù)研究院先進(jìn)制造所研究員,博士,研究方向?yàn)榫苓\(yùn)動(dòng)控制技術(shù),(E-mail)zhangchi@nimte.ac.cn。
*基金項(xiàng)目:國家自然科學(xué)基金項(xiàng)目(51207158);國家自然科學(xué)基金項(xiàng)目(51405479);中國博士后科學(xué)基金資助項(xiàng)目(2015T80639);寧波市創(chuàng)新團(tuán)隊(duì)(2012B82005);寧波市重大專項(xiàng)(奧馬特)(2013B10042&2013B10043);中科院百人計(jì)劃(2015A610146,2015A610154)
收稿日期:2015-09-25
文章編號:1001-2265(2016)03-0086-04
DOI:10.13462/j.cnki.mmtamt.2016.03.024
