繩-船模型的教學(xué)研究
2016-04-13 07:40:14何述平
物理通報(bào) 2016年3期
?

繩-船模型的教學(xué)研究
摘 要:繩-船模型是典型的運(yùn)動(dòng)學(xué)問(wèn)題,已見(jiàn)的解答存在令人費(fèi)解之處.本文細(xì)致探究了繩-船模型的解法,結(jié)果表明:有3種可行的中學(xué)物理方法、2種基本的大學(xué)物理方法;討論了解決繩-船模型的疑惑,提出了相應(yīng)的教學(xué)建議.
關(guān)鍵詞:繩-船模型物理過(guò)程物理概念物理方法
1引言
繩-船模型是典型的運(yùn)動(dòng)學(xué)問(wèn)題.如圖1,岸上某人用繞過(guò)定滑輪的不可伸長(zhǎng)的(輕)繩以勻速v0拉湖面上連接繩的小船靠岸,當(dāng)繩與水平面成角θ時(shí),小船的速度有多大?
常見(jiàn)的流行解析為:船(或連接船的繩端)的運(yùn)動(dòng)為合運(yùn)動(dòng),分解為沿繩方向和垂直繩方向的分運(yùn)動(dòng),于是得船速大小為
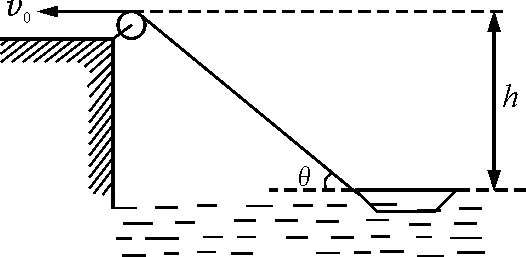
圖1 繩-船模型
然而,繩-船模型的解析均基于似乎憑想象確認(rèn)的船(或連接船的繩端)的運(yùn)動(dòng)效果——沿繩方向收縮、繞定滑輪轉(zhuǎn)動(dòng)[1~4],難免令人費(fèi)解.如何從物理理論論證船的運(yùn)動(dòng)效果?對(duì)繩-船模型,有哪些合理的解法?怎樣從物理學(xué)方法論層次理解?本文就此進(jìn)行相應(yīng)的探究,以期釋疑解惑、明晰繩-船模型的物理實(shí)質(zhì),并為其開(kāi)放式教學(xué)設(shè)計(jì)奠定基礎(chǔ).
2解法探究
2.1中學(xué)物理解法
2.1.1微元法
如圖2,斜繩與定滑輪相切處O為參考點(diǎn),經(jīng)時(shí)間Δt,船沿湖面由A點(diǎn)運(yùn)動(dòng)到B點(diǎn),位移矢量為Δr,取OC=OB,則船的位移矢量三角形為△ABC;Δt足夠短或趨于零時(shí),分位移Δr2垂直于分位移Δr1;因此,船的運(yùn)動(dòng)自然而然是沿繩的分運(yùn)動(dòng)、垂直繩的分運(yùn)動(dòng)的合運(yùn)動(dòng).Δt足夠短或趨于零時(shí),由圖2的三角函數(shù)關(guān)系得
(1)
Δr2=Δr1tanθ
(2)
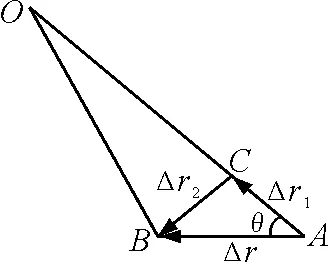
圖2 船的位移關(guān)系
依據(jù)瞬時(shí)速度概念有
(3)
(4)
(5)
v的方向水平向左,v1的方向沿繩向上,v2的方向垂直繩向下,如圖3所示.依題意:繩收縮,則由式(4)得
v1=v0
(6)
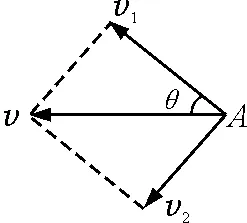
圖3 船的速度關(guān)系
由式(1)~(6)得
(7)
v2=v0tanθ
(8)
式(6)、(7)、(8)分別是船的分速度v1,合速度v,分速度v2的大小的表達(dá)式.
由圖2的位移矢量圖可形象理解為什么船速v大于繩速v1——Δt足夠短或趨于零時(shí),直角△ABC的斜邊Δr大于直角邊Δr1,從而有式(1)、(3)、(4)、(6);或由速度矢量圖3形象理解之——分速度v1與v2垂直,合速度v大于分速度v1(“大于”指大小關(guān)系).
2.1.2合成法
由圖2的位移矢量△ABC知:Δt足夠短或趨于零時(shí),船的運(yùn)動(dòng)是沿繩的分運(yùn)動(dòng)、垂直繩的分運(yùn)動(dòng)的合運(yùn)動(dòng);相應(yīng)地,船的速度v是沿繩收縮的速度v1,繞O轉(zhuǎn)動(dòng)的速度v2的合速度,速度矢量圖如圖3;由題意v1=v0,結(jié)合圖3的三角函數(shù)關(guān)系可得式(7)、(8).
雖然矢量的分解與合成互逆,但此處的問(wèn)題是知分速度v0的大小、方向,求合速度v的大小(方向已知,沿水平向左),這是速度的合成;因此,稱(chēng)為合成法更合乎物理邏輯.
2.1.3能量(守恒)法
不計(jì)定滑輪的質(zhì)量、滑輪與軸間的摩擦、繩的質(zhì)量,則在人用繞過(guò)定滑輪的繩拉船的過(guò)程中,繩拉船做的功應(yīng)等于人拉繩做的功(即人輸出的能量);因繩、船連動(dòng),則繩拉船的功率等于人拉繩的功率,即[2]
P繩=P人
(9)
而
P繩=Fvcosθ
(10)
P人=Fv0
(11)
式中F為繩拉船的力的大小,等于人拉繩的力的大小(均等于繩的彈力大小);由式(9)~(11)可得式(7).
由式(9)~(11)可理解為什么船速v大于繩速v0.繩拉船時(shí),繩的拉力與船速有不為零的夾角,為使繩拉船的功率P繩等于人拉繩的功率P人,必使船速v大于人拉繩的速度v0.
2.2大學(xué)物理解法
2.2.1直角坐標(biāo)分量法
湖岸為參考系,斜繩與定滑輪相切處為原點(diǎn)O,建立平面直角坐標(biāo)系O-xy,如圖4所示.
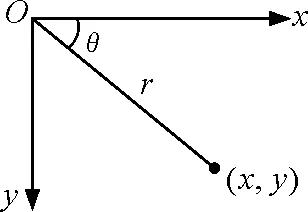
圖4 船的直角坐標(biāo)
將船作為研究對(duì)象,視作質(zhì)點(diǎn),位置坐標(biāo)為(x,y),位置矢量為
r=xi+yj
(12)
式中r,x均是時(shí)間t的變量,而y=h為恒量(因船沿湖面水平向左運(yùn)動(dòng));則船的速度為
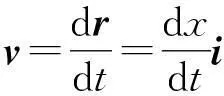
(13)
由圖4的幾何關(guān)系,有
x2=r2-y2
(14)
對(duì)t求導(dǎo),得
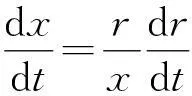
(15)
依題意,繩縮短,則有
(16)
由式(13)、(15)、(16)得
(17)
再由式(14)~(17)得船的加速度[5]
(18)
式(17)、(18)由圖4的幾何關(guān)系可表示為
(19)
(20)
式(17)、(18)或(19)、(20)表明:船的速度、加速度的方向均沿x軸反向.
2.2.2直角坐標(biāo)參量法
參考系、坐標(biāo)系同前,如圖4,取r與θ為參量,則船的位置坐標(biāo)可表示為
x=rcosθ
(21)
y=rsinθ
(22)
式中x,r,θ均是時(shí)間t的變量,而y=h為恒量(因船湖面沿水平向左運(yùn)動(dòng));求導(dǎo)得
(23)
(24)
由式(23)、(24)和同理的式(16)得

(25)
(26)

再由式(25)、(26)得船的加速度
(27)
式(25)、(27)中的負(fù)號(hào)表明:船的速度、加速度的方向均沿x軸反向.
3疑惑討論
3.1如何理解船的合運(yùn)動(dòng)
繩-船模型的研究對(duì)象是船,應(yīng)依據(jù)瞬時(shí)速度概念求船的速度;而從運(yùn)動(dòng)學(xué)求解速度的基本方法之一是基于位移,這就自然、合理地要考察船的位移Δr;而求解Δr必然要與題設(shè)已知的繩速關(guān)聯(lián),即與繩縮短的位移Δr1關(guān)聯(lián);因繩、船連動(dòng),則有圖2所示的船的位移矢量三角形就成為使然.Δt足夠短或趨于零時(shí),則有圖3所示的船的速度矢量圖.這樣就從物理概念(位移、速度)論證了船的運(yùn)動(dòng)是沿繩的分運(yùn)動(dòng)和垂直繩的分運(yùn)動(dòng)的合運(yùn)動(dòng).參見(jiàn)圖2,Δt足夠短或趨于零時(shí),可將船的位移Δr等效為相對(duì)于參考點(diǎn)O的位置矢量r(圖2中未畫(huà)出)的大小變化即分位移Δr1[引起分速度v1,參見(jiàn)式(6)]和方向變化即分位移Δr2[引起分速度v2,參見(jiàn)式(8)].這樣就從等效觀(guān)自然而然地論證了船的運(yùn)動(dòng)是沿繩方向的分運(yùn)動(dòng)和垂直繩方向的分運(yùn)動(dòng)(即先由A點(diǎn)到C點(diǎn)的分運(yùn)動(dòng)v1、再由C點(diǎn)到B點(diǎn)的分運(yùn)動(dòng)v2)的合運(yùn)動(dòng).
3.2能否觀(guān)察到船的分運(yùn)動(dòng)
試圖用平面極坐標(biāo)解釋船的運(yùn)動(dòng)效果為沿繩運(yùn)動(dòng)、垂直繩轉(zhuǎn)動(dòng),并預(yù)言能實(shí)際觀(guān)察到這兩個(gè)效果[3],進(jìn)而說(shuō)明有圖3所示的“速度分解”.這似乎是靠想象、憑經(jīng)驗(yàn)的結(jié)論.
平面極坐標(biāo)系為動(dòng)坐標(biāo)系,即坐標(biāo)單位矢量r,θ是變矢量;而平面直角坐標(biāo)系為恒坐標(biāo)系,即坐標(biāo)單位矢量i與j為恒矢量;用平面極坐標(biāo)解決繩-船模型無(wú)形之中提高了要求--需確定坐標(biāo)單位矢量的時(shí)間導(dǎo)數(shù)[6].因此,繩-船模型的解決,從大學(xué)物理考慮,用平面直角坐標(biāo)較簡(jiǎn)捷.
3.3船的分運(yùn)動(dòng)的合成結(jié)果
圖3所示的垂直繩的分運(yùn)動(dòng)v2可能引起學(xué)生的疑惑(既然有分運(yùn)動(dòng)v2,船為什么沒(méi)有向下運(yùn)動(dòng)或潛入水下?),為此,按圖5將v1,v2分別沿豎直、水平方向分解得
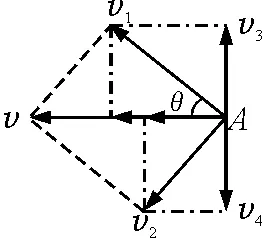
圖5 船的分運(yùn)動(dòng)的分解
v3=v1sinθ
(28)
v4=v2cosθ
(29)
v=v1cosθ+v2sinθ
(30)
由式(28)、(6)和式(29)、(8)得
v3=v0sinθ
(31)
v4=v0sinθ
(32)
由式(30)、(6)、(8)可得式(7).
式(31)、(32)表明:分運(yùn)動(dòng)v1,v2合成的結(jié)果是豎直方向的運(yùn)動(dòng)效果彼此抵消、僅有水平向左的運(yùn)動(dòng)效果,即船的可實(shí)際觀(guān)察到的運(yùn)動(dòng).學(xué)生若能認(rèn)識(shí)到船的分運(yùn)動(dòng)的合成結(jié)果,則其心中的疑惑(如有分運(yùn)動(dòng)v1,船怎么沒(méi)有豎直向上運(yùn)動(dòng)?有分運(yùn)動(dòng)v2,船怎么沒(méi)有豎直向下運(yùn)動(dòng)?)便可迎刃而解.
3.4涉及的物理方法
就中學(xué)物理而言,繩-船模型考查的是物理概念(位移,速度)、物理方法(微元法、合成法,能量法,等效法);因此,從物理方法(特別是等效法)層次理解繩-船模型顯得尤為必要.
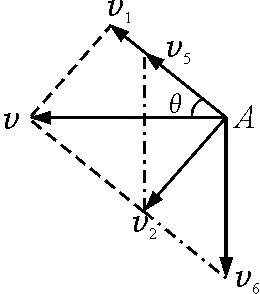
圖6
將圖3的分速度v2分別沿繩方向、豎直方向分解,得分速度v5,v6,如圖6;再將分速度v1,v5合成得v7,至此船的合運(yùn)動(dòng)v等效為分運(yùn)動(dòng)v6,v7,如圖7.
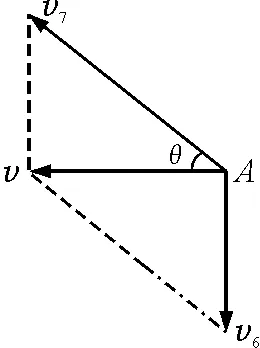
圖7
相應(yīng)速度大小關(guān)系為
v5=v2tanθ
(33)
(34)
v7=v1+v5
(35)
再結(jié)合式(6)、(8)得
v5=v0tan2θ
(36)
(37)
(38)
由式(37)、(38)和圖7可進(jìn)一步檢驗(yàn)分運(yùn)動(dòng)v6,v7的合運(yùn)動(dòng)的確是船的運(yùn)動(dòng)v,即式(7).這就推證了分運(yùn)動(dòng)v6,v7與分運(yùn)動(dòng)v1,v2等效,且與合運(yùn)動(dòng)v等效.事實(shí)上,不同形式的分運(yùn)動(dòng),不僅相互等效,而且與合運(yùn)動(dòng)等效;但就繩-船模型而言,基本形式的分運(yùn)動(dòng)是圖3所示的v1,v2.
比較上述繩-船模型的解法知,微元法、合成法是運(yùn)動(dòng)學(xué)的基本方法,但合成法以微元法為基礎(chǔ);能量法是后續(xù)的基本方法;導(dǎo)數(shù)法是物理概念與數(shù)學(xué)工具相結(jié)合的嚴(yán)密方法,但目前高中物理尚未要求、仍可嘗試(待學(xué)習(xí)了高中數(shù)學(xué)的導(dǎo)數(shù)內(nèi)容后,大學(xué)物理中導(dǎo)數(shù)法是解決運(yùn)動(dòng)學(xué)問(wèn)題的基本方法).因此,微元法、合成法、能量法是目前解決繩-船模型的高中物理基本方法.
由上述討論知,依據(jù)物理概念達(dá)到物理方法的層次,方能對(duì)繩-船模型理解到位,可使問(wèn)題的解決有根有據(jù)、邏輯嚴(yán)謹(jǐn)、層層遞進(jìn)、步步深入;因此,若達(dá)此水平,不僅知其然而且知其所以然,即便是中學(xué)物理與大學(xué)物理間的“邊緣試題”或“擦邊球試題”[3],也能依據(jù)相關(guān)物理概念、規(guī)律、方法基本解決,而不再依賴(lài)某種“經(jīng)驗(yàn)”或“套路”.
4教學(xué)建議
基于上述解法、討論,提出以下參考性教學(xué)理念、教學(xué)策略的建議.
4.1教學(xué)理念
學(xué)生解決繩-船模型的兩種典型錯(cuò)解[4]表明:學(xué)生出錯(cuò)是憑感覺(jué)、想當(dāng)然,或受運(yùn)動(dòng)的合成與分解的思維定勢(shì)的驅(qū)使,或思維片面性所導(dǎo)致;而有些教師對(duì)此問(wèn)題的講解似乎是憑經(jīng)驗(yàn)、重結(jié)果、湊答案[4],難免“美中不足”或有點(diǎn)遺憾.由上述解法、討論知,認(rèn)清船或連接船的繩端的運(yùn)動(dòng)過(guò)程是解決問(wèn)題的基礎(chǔ),合理運(yùn)用相關(guān)物理概念、物理方法是解決問(wèn)題的關(guān)鍵;因此,回歸物理過(guò)程、物理概念、物理方法是解決繩-船模型的教學(xué)基本理念.
4.2教學(xué)策略
雖然就繩-船模型的教學(xué)提出了針對(duì)學(xué)生兩種典型錯(cuò)解的順學(xué)而導(dǎo)、補(bǔ)全原解的策略,并進(jìn)行了有益的教學(xué)實(shí)踐嘗試[4];但此策略主要是順著學(xué)生錯(cuò)解的思路、教師點(diǎn)撥引導(dǎo)、學(xué)生達(dá)到正解、學(xué)生對(duì)比反思,并未深究學(xué)生錯(cuò)解的思維起點(diǎn)(兩錯(cuò)解的思維起點(diǎn)分別是:分解繩速,誤認(rèn)為繩速沿水平方向的分速度等于船速;分解船速,誤認(rèn)為船速沿繩方向的分速度等于繩速),學(xué)生的反思也未必能理解繩端的運(yùn)動(dòng)效果(因?yàn)榻處煹囊龑?dǎo)基于運(yùn)動(dòng)過(guò)程的想象,未進(jìn)行嚴(yán)謹(jǐn)?shù)奈锢砝碚撏谱C).
基于上述教學(xué)理念,若按學(xué)生嘗試→教師講解→師生對(duì)話(huà)的教學(xué)過(guò)程解決繩-船模型,則相應(yīng)的教學(xué)策略的要點(diǎn)為:學(xué)生識(shí)錯(cuò)→轉(zhuǎn)錯(cuò)→省錯(cuò),教師點(diǎn)錯(cuò)→修錯(cuò)→思錯(cuò),師生適應(yīng)→響應(yīng)→認(rèn)同;三者既相互對(duì)應(yīng),又辯證統(tǒng)一.
5結(jié)語(yǔ)
本文給出了船的運(yùn)動(dòng)為什么是沿繩方向分運(yùn)動(dòng)、垂直繩方向分運(yùn)動(dòng)的合運(yùn)動(dòng)的理論論證,呈現(xiàn)了解決繩-船模型的3種中學(xué)物理方法和2種大學(xué)物理方法,提供了“同題異法”的一個(gè)典型實(shí)例;討論了解決繩-船模型的疑惑,進(jìn)而奠定了教學(xué)的物理理論基礎(chǔ);提出了基于物理過(guò)程、物理概念、物理方法解決繩-船模型的參考性教學(xué)建議.
或許“不識(shí)廬山真面目,只緣身在此山中”,對(duì)中學(xué)物理疑惑性、難點(diǎn)性問(wèn)題,其解決的有效途徑之一應(yīng)是回歸物理過(guò)程、物理概念、規(guī)律、物理方法(包括大學(xué)物理層次的居高認(rèn)識(shí)),同時(shí)應(yīng)借鑒相關(guān)的教育理論研究成果、教學(xué)實(shí)踐經(jīng)驗(yàn),使問(wèn)題的解決既有堅(jiān)實(shí)的物理依據(jù),又有可靠的教育理論基礎(chǔ)和教學(xué)實(shí)踐基礎(chǔ),進(jìn)而有效培養(yǎng)學(xué)生解決物理問(wèn)題的能力.
參 考 文 獻(xiàn)
1方銀良.為何繩端速度如此分解.物理教師,2010,31(2):14
2馬皓.再論“為何繩端速度如此分解”.物理通報(bào),2012(1):109~110
3宋金洪.對(duì)一道物理試題的追問(wèn).物理教師,2013,34(7):64~65
4劉桂枝. 順學(xué)而導(dǎo) 補(bǔ)全原解——基于學(xué)生“最近發(fā)展區(qū)”的“拉船模型”糾錯(cuò)策略. 物理教師, 2013, 34(12): 25~26
5胡盤(pán)新,孫迺疆.普通物理學(xué)(第5版)習(xí)題分析與解答.北京:高等教育出版社,2003.9~10
6Kleppner D,Kolenkow R J.力學(xué)引論.寧遠(yuǎn)源,等譯.北京:人民教育出版社,1980.33~35,43
Teaching Research on Rope - ship Models
He Shuping
(Research Institute of Physics Education,College of Education,Northwest Normal University,Lanzhou,Gansu730070)
Abstract:The rope-ship model is a typical kinematics problem,its solution of having already been seen exists puzzling.This paper in detail explores the solution of rope-ship model,the results show that: there are 3 kinds of feasible methods of high school physics,2 kinds of basic college physics methods;the doubles of solving rope-ship model are discussed,and corresponding teaching suggestions are put forward.
Key words:rope-ship model;physics process;physics concept;physics method
(收稿日期:2015-10-10)
作者簡(jiǎn)介:何述平*何述平(1964-),男,碩士,副教授,主要從事物理教學(xué)論的理論和實(shí)驗(yàn)的教學(xué)與研究工作.
(西北師范大學(xué)教育學(xué)院物理教育研究所甘肅 蘭州730070)
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:00
中學(xué)生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
中學(xué)生(2015年2期)2015-03-01 03:43:33