基于二型模糊邏輯系統的改進卡爾曼濾波算法
2015-12-20 06:54:48何火嬌王映龍
計算機工程與設計 2015年12期
華 晶,何火嬌,王映龍
(1.江西農業大學 軟件學院,江西 南昌330045;2.南昌大學 機電工程學院,江西 南昌330031;3.江西農業大學 江西省高等學校農業信息技術重點實驗室,江西 南昌330045)
0 引 言
常用于狀態估計的濾波器有中值濾波、均值濾波和卡爾曼濾波等。其中,卡爾曼濾波[1-3]應用最為廣泛。卡爾曼濾波算法的性能非常依賴于先驗噪聲統計特性的質量。已經證明噪聲先驗統計特性不準確可能嚴重降低濾波算法的性能[4],甚至導致濾波發散。事實上,在很多實際應用中,由于各方面的因素,噪聲統計特性的估計與實際不符。在使用傳統的卡爾曼濾波算法進行狀態估計時,若噪聲的協方差仍然用先驗估計值,必然會使狀態估計值產生較大的誤差,影響估計的準確度。針對這一問題,國內外學者先后提出了許多自適應濾波方法[5-8]。這些方法的基本思想都是:在卡爾曼濾波過程中,使用自適應技術對噪聲統計特性進行實時調整。然而,迄今為止,絕大多數方法都是集中在利用一型模糊邏輯實現自適應調整。本文提出一種二型模糊卡爾曼濾波算法 (簡稱為IT2FKF),在傳統卡爾曼濾波算法中使用二型模糊邏輯系統不斷地調整噪聲方差矩陣,使其逐漸逼近真實噪聲水平,從而避免濾波的發散,并提高濾波精度。并通過仿真實驗驗證了該算法的有效性和可行性。
1 二型模糊邏輯系統
二型模糊集合[9-15]的概念是由Zadeh教授在普通模糊集合 (一型模糊集合)的基礎上提出的。它與一型模糊集合的不同在于,它的隸屬度本身存在模糊性,是一個一型模糊集合,從而能更好地描述不確定性。
一個定義在論域X 上的二型模糊集合珦A 可以表示為

其中,μ珦A(x)是x 的隸屬度函數,它是 [0,1]上的一個普通模糊集合;u和fx(u)分別為主、次隸屬度值。
如果一個模糊邏輯系統中至少使用一個二型模糊集合,則稱之為二型模糊邏輯系統,主要由以下5個部分構成。
1.1 模糊化
當x =x′時,μ珦AX(x)=1/1;
當x ≠x′時,μ珦AX(x)=1/0。
1.2 模糊規則
若一個二型模糊邏輯系統有p 個輸入x1∈X1,…,xp∈Xp,并且包含M 條規則,那么,第l條規則可寫為

1.3 模糊推理
基于已設置好的模糊規則,模糊推理把輸入的二型模糊集合轉換成輸出的二型模糊集合。

Rl的次隸屬度函數為

由輸入與規則合成得到輸出珟Bl的隸屬函數為

激發集是區間一型集合,表示為

在推理過程中,n 個前件通過 “交”運算連接,而m條模糊規則通過 “并”運算進行組合。
1.4 降 型
由于模糊推理的結果是二型模糊集合,為了進行下一步的解模糊運算,先將二型模糊集合轉換成一型模糊集合。此步驟可以看作是解模糊的擴展。
二型模糊系統常用的降型方法有很多,其中,centerof-sets相對于其它方法具有實際意義,所以本文中采用這種降型方法,它的表達式如下


1.5 解模糊
二型模糊邏輯系統的解模糊是將降型得到的一型模糊集合映射為實數輸出。式 (7)是一個區間集合,解模糊只需要求區間端點的中心即可

2 改進的自適應卡爾曼濾波
在傳統卡爾曼濾波算法中,都是假定事先知道系統的過程噪聲和量測噪聲的協方差矩陣。在很多實際應用中,過程噪聲的統計特性可以通過實驗手段獲得。但是,量測噪聲的統計特性是不確定的。然而,卡爾曼濾波算法估計的準確度和先驗噪聲統計特性的質量密切相關。因此,為了使系統的量測噪聲更接近于實際情況,本文使用二型模糊邏輯實時估計量測噪聲方差R,使得新息的理論協方差和實際協方差相匹配,從而影響濾波的增益值,修正狀態估計值,提高估計準確度。
新息的理論方差為

新息的實際方差為

其中,ri為新息或殘差,i0=k-M+1 是估計窗口的第一個采樣。M 為采樣窗口的長度,一般根據經驗選定。
理想情況下,新息的理論方差和實際方差應該大約相同,如果兩者值偏差太大,這就表示量測噪聲水平發生了改變,那么,這時就應該采取一定的辦法調節理論方差,使得它重新接近于實際方差的值。
為了檢測兩者之間的差異,定義一個新的變量d

由式 (9)和式 (11)可知,增大Rk將導致Sk增大,反之亦然。那么,可以由dk的值來調整Rk,從而改變Sk的值,最終減小Sk與Ck之間的差異。因此,以dk中的對角元素dk(i,i)作為模糊推理系統的輸入語言變量,輸出語言變量為相應的調節增量因子fk。其調整方法為

定義輸入變量dk的模糊集合為 {NL (負大),NS (負小),ZO (零),PS (正小),PL (正大)},輸出變量fk的模糊集合 為 {IL (增 大),IS (增 小),MN (保 持),DS(減小),DL (減大)},它們的隸屬度函數如圖1所示,均采用二型三角隸屬函數。

圖1 輸入/輸出變量隸屬函數
根據以上分析,模糊推理規則見表1。

表1 模糊推理規則
降型和解模糊方法分別采用文中第一部分介紹的centerof-sets和centroid。將每次模糊推理系統的輸出fk帶入式(12),對Rk進行自適應調整。IT2FKF算法流程如圖2所示。

圖2 IT2FKF算法
3 仿真實驗
3.1 仿真模型
采用以下線性系統模型[16]進行仿真實驗
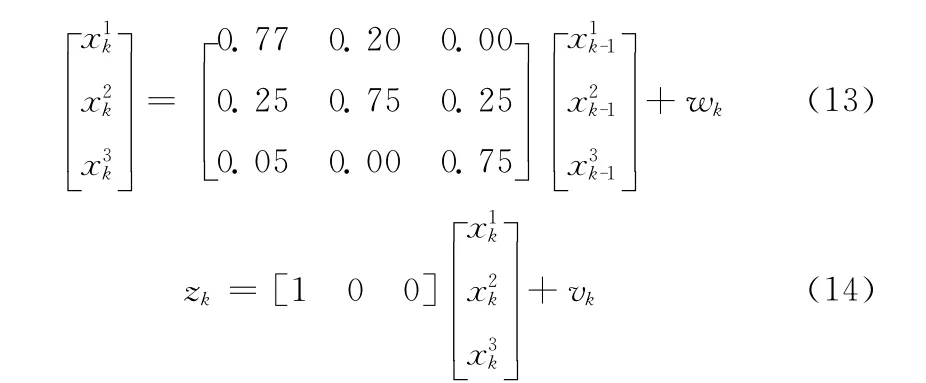
3.2 實驗結果及分析
為了驗證IT2FKF 算法的有效性,我們將其與傳統卡爾曼 濾 波 算 法 (KF)、一 型 模 糊 卡 爾 曼 濾 波 算 法[16](T1FKF)進行對比。
表2 給出了量測均方誤差,以及 KF、T1FKF、IT2FKF算法的估計均方誤差的比較。顯然,IT2FKF的估計均方誤差最小。

表2 量測和估計均方誤差對比
圖3為狀態x1(位置)的跟蹤曲線,實線表示位置的實際值,點劃曲線表示位置的測量值,長虛線表示用IT2FKF算法對位置的估計。可以看出,盡管事先不知道準確的量測噪聲協方差,但是IT2FKF 算法可以得比量測位置更接近于實際位置的估計。

圖3 位置跟蹤曲線比較
圖4為傳統卡爾曼濾波算法、一型模糊卡爾曼濾波算法和二型模糊卡爾曼濾波算法進一步的比較。長虛線、點劃線和實線分別表示用KF、T1FKF 和IT2FKF 算法得到的位置的估計值與實際值之間的誤差。由圖4 可知,IT2FKF算法比其它兩種算法的估計誤差都更小,濾波精度更高。

圖4 位置估計誤差比較
4 結束語
針對實際情況下,量測噪聲協方差不能準確知道或者不斷變化這一問題,本文提出了一種基于二型模糊邏輯系統的自適應卡爾曼濾波算法 (IT2FKF)。為了驗證本文所提出的IT2FKF算法的性能,采用一個線性系統模型進行仿真實驗,并將其與傳統卡爾曼濾波、一型模糊卡爾曼濾波兩種算法進行對比。仿真實驗結果表明,IT2FKF 算法有效地提高了狀態估計的準確度。
文中所采用的區間二型模糊集合的隸屬函數是根據經驗而選擇的,需要耗費大量的時間,因此,后期的研究工作將著重解決此問題。
[1]Grewal M S,Andrews A P.Kalman filtering:Theory and practice using MATLAB [M].John Wiley &Sons,2011.
[2]Simon D.Kalman filtering with state constraints:A survey of linear and nonlinear algorithms [J].IET Control Theory &Applications,2010,4 (8):1303-1318.
[3]WANG Taobo,HUANG Baojun.4Dflight trajectory prediction model based on improved Kalman filter [J].Journal of Computer Applications,2014,34 (6):1812-1815 (in Chinese).[王濤波,黃寶軍.基于改進卡爾曼濾波的思維飛行航跡預測模型 [J].計算機應用,2014,34 (6):1812-1815.]
[4]GUO Yingshi,WANG Chang,ZHANG Yaqi.Analysis of noise variance’s effect on Kalman filter result[J].Computer Engineering and Design,2014,35 (2):641-645 (in Chinese). [郭應時,王暢,張亞岐.噪聲方差對卡爾曼濾波結果的影響分析[J].計算機工程與設計,2014,35 (2):641-645.]
[5]CHEN Xinglin,LI Peng,SONG Shenmin.The multi sensor information fusion based on fuzzy adaptive Kalman filter[J].Aerospace Control,2011,29 (1):19-22 (in Chinese). [陳興林,李鵬,宋申民.基于模糊自適應卡爾曼濾波算法的多傳感器信息融合 [J].航天控制,2011,29 (1):19-22.]
[6]Al-Hamadi H M,EL-Naggar K M.Measurement of synchronous machine parameters using Kalman filter based fuzzy logic estimator[J].Measurement,2010,43 (10):1327-1335.
[7]Yadaiah N,Srikanth T,RAO VS.Fuzzy Kalman Filter based trajectory estmation [C]//Proceedings of the International Conference on Hybrid Intelligent Systems,2011:566-571.
[8]Ibarra-Bonilla MN,Escamilla-Ambrosio PJ,Ramirez-Cortes JM,et al.Pedestrian dead reckoning with attitude estimation using a fuzzy logic tuned adaptive Kalman filter [C]//Proceedings of the International Symposium on Circuits and Systems,2013:1-4.
[9]Aisbett J,Rickard J T,Morgenthaler D G.Type-2fuzzy sets as functions on spaces[J].IEEE Transactions on Fuzzy Systems,2010,18 (4):841-844.
[10]Khosravi A,Nahavandi S,Creighton D,et al.Interval type-2 fuzzy logic systems for load forecasting:A comparative study[J].IEEE Transactions on Power Systems,2012,27(3):1274-1282.
[11]WU D.On the fundamental differences between interval type-2and type-1fuzzy logic controllers [J].IEEE Transactions on Fuzzy Systems,2012,20 (5):832-848.
[12]Wu D,Mendel J M.On the continuity of type-1and interval type-2fuzzy logic systems[J].IEEE Transactions on Fuzzy Systems,2011,19 (1):179-192.
[13]Castillo O,Melin P.A review on the design and optimization of interval type-2fuzzy controllers[J].Applied Soft Computing,2012,12 (4):1267-1278.
[14]Castillo O,Melin P,Alanis A,et al.Optimization of interval type-2fuzzy logic controllers using evolutionary algorithms[J].Soft Computing,2011,15 (6):1145-1160.
[15]Wu D.Approaches for reducing the computational cost of in-terval type-2fuzzy logic systems:Overview and comparisons[J].IEEE Transactions on Fuzzy Systems,2013,21 (1):80-99.
[16]Li Jian,Lei Yanhua,Cai Yunze,et al.Multi-sensor data fusion algorithm based on fuzzy adaptive Kalman filter [C]//Proceedings of the Chinese Control Conference,2013:4523-4527.
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
幸福(2018年33期)2018-12-05 05:22:42
測控技術(2018年12期)2018-11-25 09:37:34
Coco薇(2017年11期)2018-01-03 20:59:57
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
