改進(jìn)趨近率滑模控制在APF中的應(yīng)用實現(xiàn)
2015-12-20 06:56:04李云祥沈志達(dá)
計算機(jī)工程與設(shè)計 2015年12期
關(guān)鍵詞:系統(tǒng)
李云祥,沈志達(dá),鄭 丹
(中國航天科工集團(tuán)第二研究院706所,北京100854)
0 引 言
APF的電流跟蹤控制方法一直以來都是國內(nèi)外的一個研究熱點,目前常見的控制方法有:①滯環(huán)控制,容差帶寬會影響控制的效果且開關(guān)頻率不固定,不利于濾波器的設(shè)計[1,2];②PI控制,對變化率較快的諧波信號控制精度不佳,且控制參數(shù)難以選定[3];③重復(fù)控制,基于上一周期的信號誤差對當(dāng)前信號進(jìn)行控制,對突變信號的動態(tài)響應(yīng)較慢[4-6]等。滑模控制與傳統(tǒng)經(jīng)典的電流控制算法相比,動態(tài)響應(yīng)快,有較強(qiáng)的抗干擾能力強(qiáng),且是一種非線性的控制方法,很適合結(jié)構(gòu)隨開關(guān)狀態(tài)變化的電路之中。然而,滑模控制有一個明顯的缺點,即抖振[7]。為了削弱滑模控制中的抖振問題,提出了很多方法,有濾波法、觀測器法、趨近律法等[8]。本文在研究削弱抖振的趨近律法的基礎(chǔ)上,提出了一種改進(jìn)趨近律法的滑模控制方案,通過選擇適當(dāng)?shù)臓顟B(tài)變量,合適的系統(tǒng)參數(shù),通過Simulink進(jìn)行仿真實驗,實驗結(jié)果表明,此控制方案不僅可行,而且較常規(guī)的滑模控制算法有較好的控制效果,到達(dá)了預(yù)期的結(jié)果。
1 有源電力濾波器的數(shù)學(xué)模型
有源電力濾波器的原理拓?fù)浣Y(jié)構(gòu)如圖1 所示[9]。通過有源電力濾波器工作的基本原理,參見文獻(xiàn) [10]可知,有源電力濾波器主要有指令電流計算電路和指令電流生成電路兩部分組成,而控制算法直接影響指令電流生成電路的輸出結(jié)果。
圖1中,iSa、iSb、iSc分別是系統(tǒng)ABC三相源電流,iLa、iLb、iLc是三相負(fù)載電流,ia、ib、ic 是APF的三相補(bǔ)償電流,La、Lb、Lc是三組連接電感,Usa、Usb、Usc 是三相源電壓,Udc為直流側(cè)母線電壓,由基爾霍夫電壓和電流定理可得
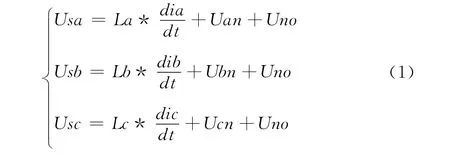
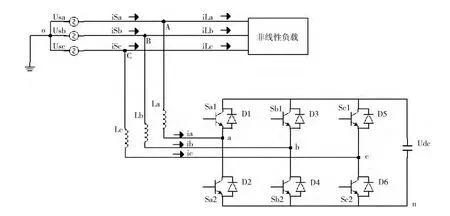
圖1 APF系統(tǒng)拓?fù)浣Y(jié)構(gòu)
定義系統(tǒng)的開關(guān)函數(shù)為

式中:k=a,b,c。
設(shè)系統(tǒng)三相對稱且平衡,由式 (2)可得
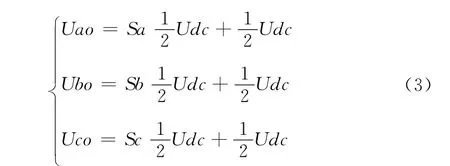
將式 (3)帶入到式 (1)中可得

令

則式 (4)可以表示為

三相系統(tǒng)的方程只有兩項是獨立的,將abc 三相坐標(biāo)系轉(zhuǎn)換為αβ 靜止坐標(biāo)系有
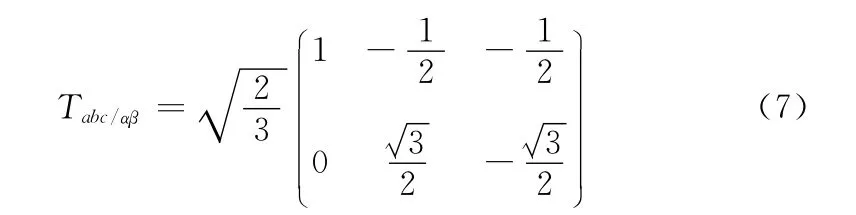
將式 (7)帶入式 (6)可得系統(tǒng)兩相靜止坐標(biāo)系下狀態(tài)空間方程為

2 滑模控制
滑模控制是從變結(jié)構(gòu)系統(tǒng)的控制中得到和發(fā)展的一種非線性控制方法,它包含一個不連續(xù)的狀態(tài)反饋控制率,該控制率根據(jù)系統(tǒng)狀態(tài)變量的變化在系統(tǒng)的狀態(tài)空間內(nèi)的兩個連續(xù)的系統(tǒng)結(jié)構(gòu)之間高頻的切換,以達(dá)到被控系統(tǒng)的動態(tài)能夠精確地跟蹤預(yù)先設(shè)定的期望狀態(tài)[11]。
若有一個切換面S(x)=0的所有點都是終止點,即系統(tǒng)運(yùn)動到切換面S(x)=0附近時,從切換面的兩側(cè)趨近切換面,當(dāng)系統(tǒng)在預(yù)先設(shè)計的滑模面上運(yùn)動,無論系統(tǒng)的初始狀態(tài)從哪里開始,都會被吸引到該區(qū)域,最終停留在切換面上[12]。切換面S(x)=0上的所有點組成的狀態(tài)空間區(qū)就是滑動模態(tài)區(qū),切換面S(x)=0就是滑模切換面,系統(tǒng)在滑模區(qū)的運(yùn)動就稱作 “滑模運(yùn)動”。系統(tǒng)能夠運(yùn)動到切換面S(x)=0,必須滿足下列式子

滑模運(yùn)動首先要存在切換面,系統(tǒng)能夠趨近并且能夠達(dá)到該切換面,然后沿著該切換面運(yùn)動到預(yù)先設(shè)定的平衡點。其次,滑模運(yùn)動必須要滿足終止點的條件,即系統(tǒng)運(yùn)動的初始點無論在狀態(tài)空間的任何位置,系統(tǒng)的運(yùn)動必須朝向切換面S(x)=0,并且在有限的時間內(nèi)能夠到達(dá)切換面。
(1)設(shè)計切換面函數(shù)s(x),使滑動模態(tài)漸近且穩(wěn)定。
上述切換函數(shù)S(x)和控制函數(shù)u(x)都得到后,一個完整的滑模控制系統(tǒng)就實現(xiàn)了。
3 基于趨近律的滑模控制
整個滑模控制的運(yùn)動軌跡分為兩個部分:趨近運(yùn)動狀態(tài),即系統(tǒng)的運(yùn)動點由任意初始位置向切換面S(x)=0趨近的運(yùn)動,圖2中的AB段;滑模運(yùn)動狀態(tài),即系統(tǒng)運(yùn)動點沿著滑模面向預(yù)定平衡點運(yùn)動,圖2中的B0段。
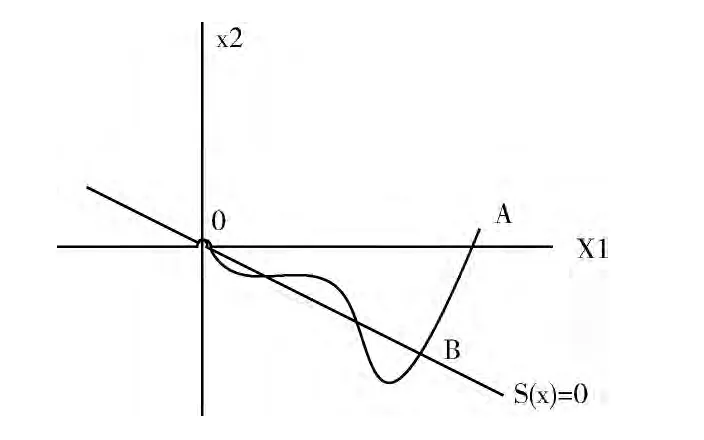
圖2 滑模控制運(yùn)動軌跡
滑模控制的理想條件是不考慮系統(tǒng)在滑模切換面S(x)=0兩側(cè)切換過程的空間以及時間滯后,且控制量沒有限制,在理想條件下,系統(tǒng)在滑模控制下的運(yùn)動是光滑并且漸近穩(wěn)定于原點,就不會產(chǎn)生抖振。但是在實際的條件下,由于系統(tǒng)狀態(tài)存在時間以及空間的滯后,不可能根據(jù)控制信號做出及時快速的響應(yīng),系統(tǒng)的運(yùn)動只會在原有滑模切換面兩側(cè)的光滑切換過程中疊加鋸齒狀的軌跡,如圖3所示。
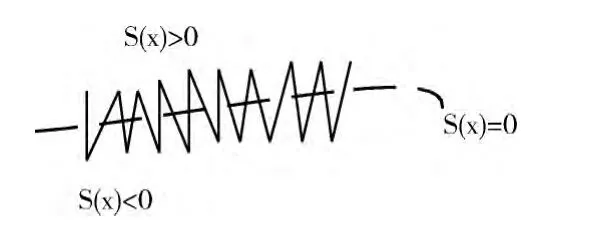
圖3 抖振曲線
產(chǎn)生抖振的原因從物理上講,是由于系統(tǒng)的狀態(tài)點由初始點A 向滑模面S(x)=0趨近運(yùn)動,到達(dá)B點時,存在一定的速度和慣性。如果存在某種趨近運(yùn)動,當(dāng)系統(tǒng)的運(yùn)動點遠(yuǎn)離切換面時,有較大的速度,迅速的趨近去換面S(x)=0,在系統(tǒng)的運(yùn)動點向切換面運(yùn)動的過程中,速度越來越小,當(dāng)運(yùn)動點到達(dá)切換面時,速度接近于零,這樣不僅保證了滑模控制的動態(tài)特性,而且還削弱了系統(tǒng)的抖振。
由常規(guī)的趨近率可以看出

采用趨近率的滑模控制算法的趨近速度不是恒定不變的,當(dāng)系統(tǒng)遠(yuǎn)離滑模面時,速度較大,之后,速度逐漸變小,當(dāng)S →0時,趨近速度等于ε,如果ε選取合適,這樣不僅縮短了趨近時間,而且減小了系統(tǒng)運(yùn)動到滑模面時的速度,在明顯的改善系統(tǒng)的動態(tài)特性的同時也削弱了抖振的影響。
根據(jù)趨近律的設(shè)計原則,在常規(guī)趨近律基礎(chǔ)上,設(shè)計改進(jìn)趨近律為

與常規(guī)趨近律相比可知,當(dāng)系統(tǒng)遠(yuǎn)離切換面時,即|S|0時,趨近運(yùn)動的速度與S2成正比,速度更大,系統(tǒng)可以在更短的時間內(nèi)到達(dá)切換面;當(dāng)系統(tǒng)接近切換面時,即S→0時,S21,系統(tǒng)的速度等于εs2,趨近速度更小。綜上所述,改進(jìn)趨近律不僅可以改善趨近運(yùn)動的動態(tài)特性,趨近時間更短,而且還可以明顯的削弱由于速度造成的系統(tǒng)抖振。
與此同時,當(dāng)s>0時

當(dāng)s<0時

由式 (12)、式 (13)可知,改進(jìn)的趨近律同樣滿足滑模控制可達(dá)性的條件≤0。
有源電力濾波器的控制問題,屬于電流的跟蹤控制問題,根據(jù)滑模控制理論,定義滑模切換面

則,切換函數(shù)為

由式 (8)可得
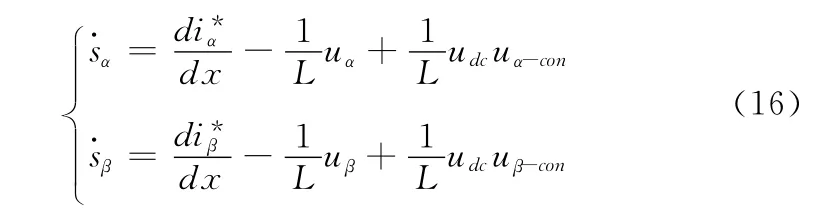
其中,uα-con,uβ-con是α,β兩相的控制信號,可設(shè)

其中,sgn(x)是符號函數(shù),當(dāng)x >0 時,sgn(x)=1,當(dāng)x <0時,sgn(x)=-1。
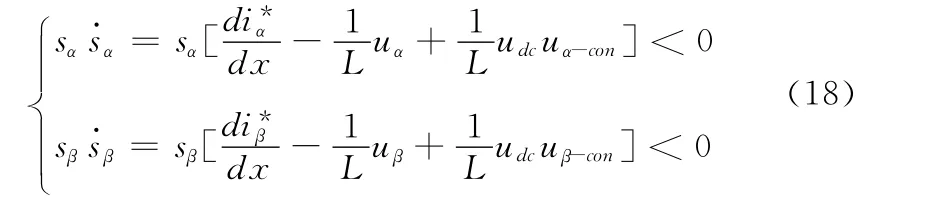
可以得出

根據(jù)式 (19)選取合適的參數(shù)帶入到式 (18),就得到了滑模控制的控制量,通過PWM 或者SVPWM 調(diào)制得到相應(yīng)的開關(guān)量,控制IGBT 等開關(guān)設(shè)備,以實現(xiàn)電流跟蹤控制的效果。
4 仿真實驗結(jié)果
本文通過Matlab建立APF 系統(tǒng)的仿真模型,仿真的條件是:三相電壓380V,頻率50Hz,電感L=1mh,負(fù)載為三相整流橋。為了單純的驗證前文所提出的電流控制算法的效果,將直流側(cè)電壓Udc固定在800V,以排除直流側(cè)電壓控制的影響。
三相負(fù)載電流的波形如圖4所示,負(fù)載電流發(fā)生明顯的畸變,由標(biāo)準(zhǔn)的三相正弦波變?yōu)椤巴枚洹毙危訟相為例。
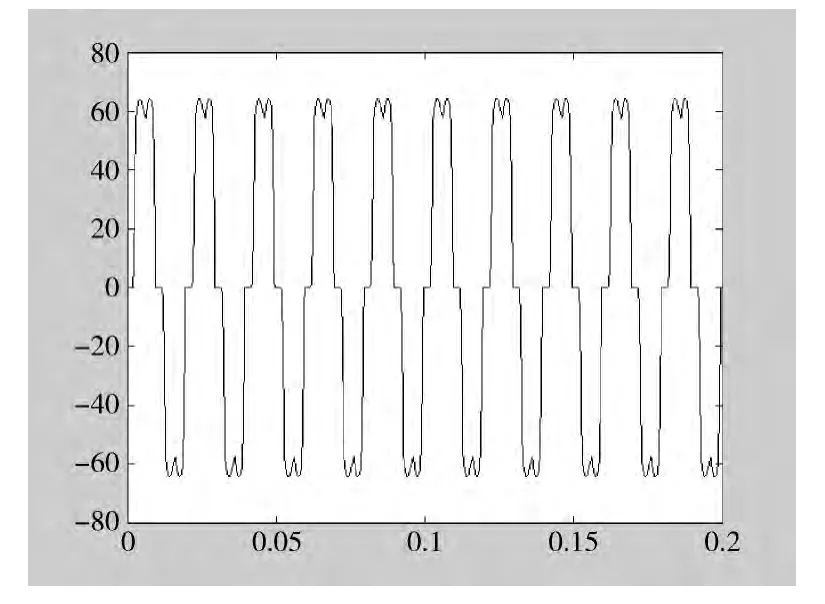
圖4 負(fù)載電流波形
對三相的負(fù)載電流進(jìn)行FFT 分析,分析的結(jié)果如圖5所示,負(fù)載電流的總畸變率THD=24.02%,主要存在5、7、11、13等次諧波。
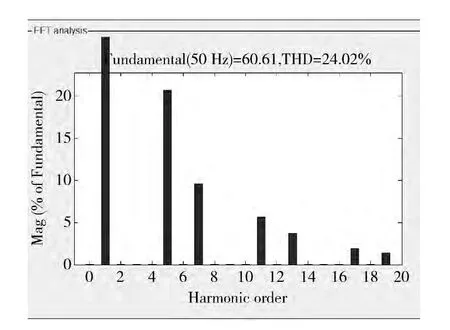
圖5 負(fù)載電流FFT 分析
為了驗證本文所提算法,在相同的條件下,對常規(guī)趨近律以及改進(jìn)的趨近律的滑模控制算法進(jìn)行仿真的結(jié)果進(jìn)行對比,以A 相為例,圖6 是諧波補(bǔ)償后A 相的負(fù)載電流,從圖中可以看出,二者都可以明顯的改善負(fù)載電流的波形,改進(jìn)趨近律的滑模控制算法補(bǔ)償后負(fù)載電流的紋波更小、更光滑,結(jié)果接近于正弦波。
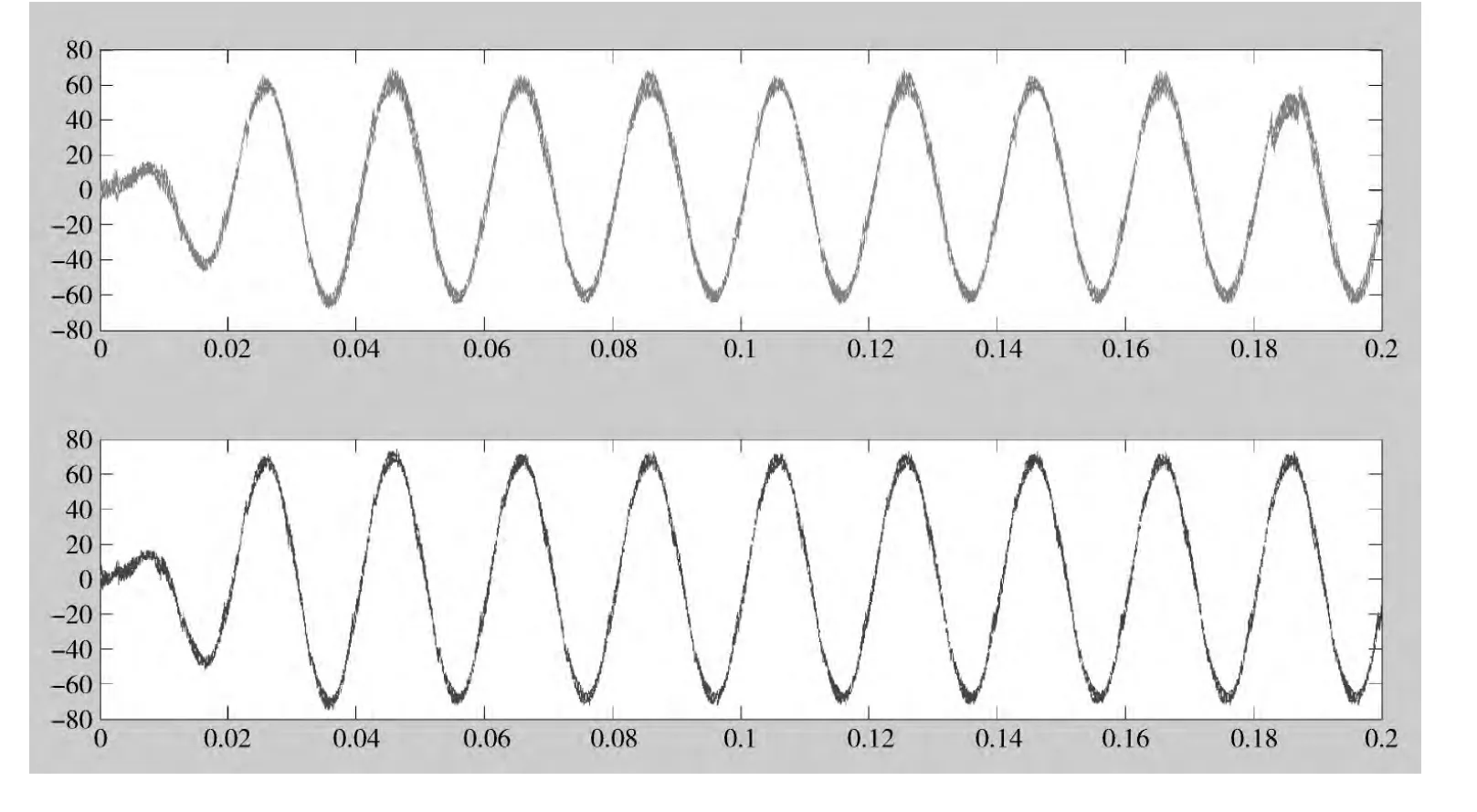
圖6 諧波補(bǔ)償后A 相負(fù)載電流
由圖7可知,常規(guī)趨近律將負(fù)載電流的畸變率由THD=24.02%下降到THD=6.60%,由圖8可得改進(jìn)趨近律的諧波濾除效果,將負(fù)載電流的畸變率由下THD=24.02%降到THD=4.76%,比常規(guī)趨近律的補(bǔ)償效果更好。
圖9、圖10分別是常規(guī)趨近律和改進(jìn)趨近律的諧波跟蹤圖,上圖曲線為諧波,下圖曲線為諧波補(bǔ)償電流,對比圖9和圖10可知,改進(jìn)趨近律的滑模控制算法跟蹤諧波電流更精準(zhǔn),抖振較小。
5 結(jié)束語
本文對有源電力濾波器的滑模控制算法進(jìn)行了研究并建立了Matlab 仿真模型,針對當(dāng)前滑模控制算法存在的“抖振”問題,以趨近律方面為切入點,對傳統(tǒng)常規(guī)趨近律做了改進(jìn),與常規(guī)趨近律的滑模控制算法進(jìn)行對比仿真驗證,仿真結(jié)果表明,改進(jìn)趨近律的滑模控制算法在APF系統(tǒng)上的可行的,在相同的條件下,諧波跟蹤更精確,補(bǔ)償后的三相負(fù)載電流的紋波更小,負(fù)載電流畸變率由常規(guī)趨近率的6.6%,下降到4.76%,補(bǔ)償效率提高28%,諧波補(bǔ)償?shù)男Ч茫哂幸欢ǖ难芯亢蛯嵱脙r值。
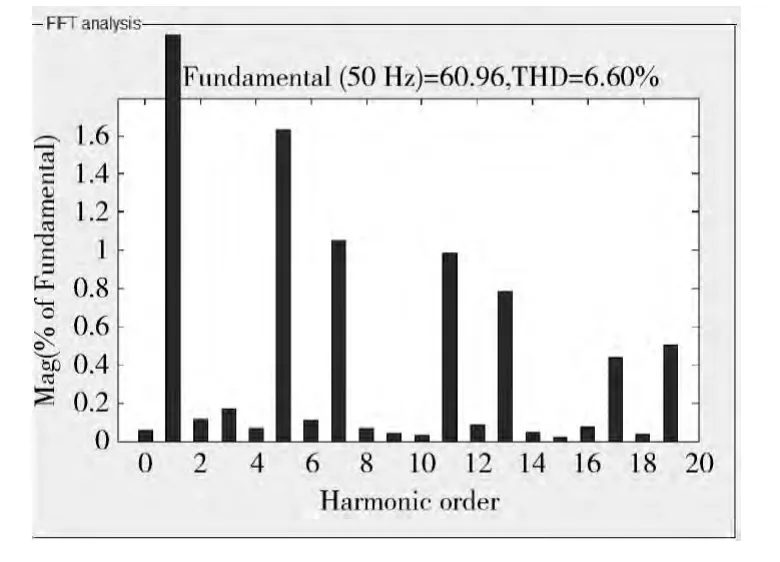
圖7 常規(guī)趨近律的諧波濾出效果
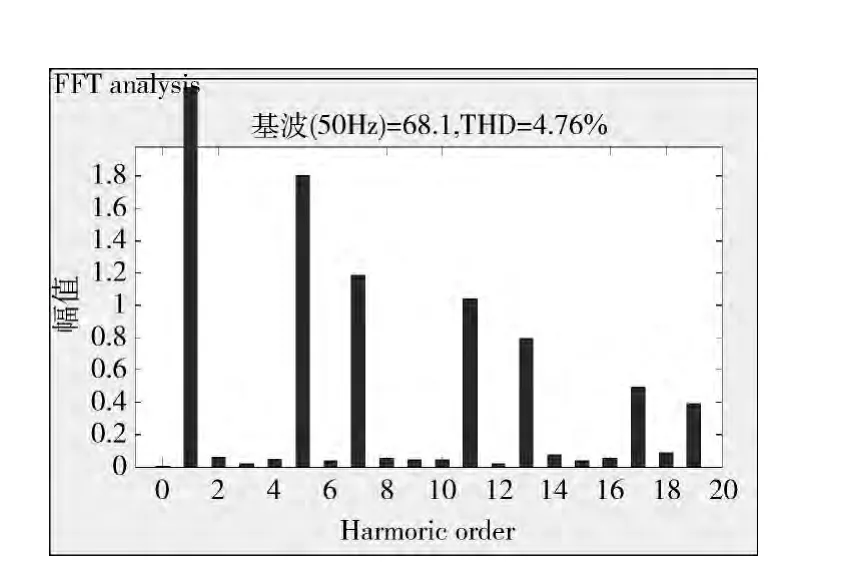
圖8 采用改進(jìn)趨近律的諧波濾除效果
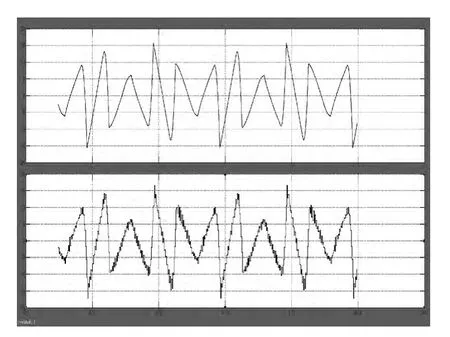
圖9 常規(guī)趨近律諧波跟蹤
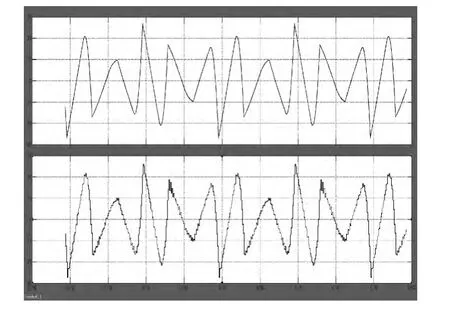
圖10 改進(jìn)趨近律諧波跟蹤
[1]XIE Bingruo.Research on a new series hybrid active power filter and some related problem [D].Wuhan:Huazhong University of Science and Technology,2010 (in Chinese).[謝冰若.新型串聯(lián)混合型有源電力濾波器及相關(guān)問題研究 [D].武漢:華中科技大學(xué),2010]
[2]LU Feng,TIAN Mingxing,ZHU Qianghua,et al.Comparison of indeterminate frequency hysteresis SVPWM control and hysteresis control for shunt active power filter[J].Journal of Power Supply,2014,13 (5):19-27(in Chinese). [盧鋒,田銘興,朱強(qiáng)化,等.并聯(lián)有源電力濾波器不定頻滯環(huán)SVPWM 控制與滯環(huán)控制的比較[J].電源學(xué)報,2014,13 (5):19-27.]
[3]ZHOU Kaijie.Reacher on active power filter [D].Jinan:Shandong University,2011 (in Chinese).[周凱杰.有源電力濾波器的研究 [D].濟(jì)南:山東大學(xué),2011.]
[4]LIANG Zhishan,QIU Yinfeng,WEI Xueliang.Research on passivity-based control of APF with repetitive control compensation [J].Electric Machines and Control,2013,17 (7):87-93 (in Chinese). [梁志珊,邱銀鋒,魏學(xué)良.重復(fù)控制補(bǔ)償?shù)挠性措娏V波器無源控制 [J].電機(jī)與控制學(xué)報,2013,17(7):87-93.]
[5]ZHENG Dan.Research on harmonic detection and control method of active power[D].Beijing:Beijing Jiaotong University,2007 (in Chinese).[鄭丹.并聯(lián)型電力有源濾波器的諧波檢算及控制策略研究 [D].北京:北京交通大學(xué),2007.]
[6]TANG Xin,MA Yingzhao,LI Hongtao.Double closed-control of active filter using repetitive algorithm [J].Electric Machines and Control,2009,13 (S1):67-71 (in Chinese).[唐欣,馬迎召,李紅濤.基于重復(fù)控制的有源濾波器雙閉環(huán)控制[J].電機(jī)與控制學(xué)報,2009,13 (S1):67-71.]
[7]WANG Han.Novel sliding mode control method for threephase three-wire shunt active power filter[J].Electronic Design Engineering,2013,20 (23):66-72 (in Chinese). [汪韓.新型三相三線制并聯(lián)有源濾波器的滑模控制方法 [J].電子設(shè)計工程,2013,20 (23):66-72.]
[8]XU Zhuang,LI Guangjun,XU Dianguo.Parallel control of generator-side converters for permanent magnet direct-drive wind power generation systems [J].High Voltage Engineering,2010,36 (2):474-480 (in Chinese). [徐壯,李廣軍,徐殿國.永磁直驅(qū)風(fēng)電系統(tǒng)發(fā)電機(jī)側(cè)變流器的并聯(lián)控制 [J].高電壓技術(shù),2010,36 (2):474-480.]
[9]ZHENG Dan,LIAO Min,LIU Zhenquan,et al.Three closed loops control strategy of three-phase four-wire active power filter[J].Power System Protection and Control,2014 (22):95-99 (in Chinese).[鄭丹,廖敏,劉振全,等.三相四線有源電力濾波器的三閉環(huán)控制策略 [J].電力系統(tǒng)保護(hù)與控制,2014 (22):95-99.]
[10]WANG Zhao’an,YANG Jun,LIU Jinjun,et al.Harmonic suppression and reactive power compensation [M].Beijing:China Machine Press,2005 (in Chinese). [王兆安,楊君,劉進(jìn)軍,等.諧波抑制和無功功率補(bǔ)償 [M].北京:機(jī)械工業(yè)出版社,2005.]
[11]YI Yongqiang.Research on the sliding mode servo control in deep-sea precision manipulator[D].Wuhan:Huazhong University of Science and Technology,2007 (in Chinese).[易勇強(qiáng).深海精密作業(yè)機(jī)械手滑模伺服控制策略研究 [D].武漢:華中科技大學(xué),2007.]
[12]ZHANG Dong.Synchronization of chaotic behavior and control of a class of delayed neural network system [D].Shanghai:Tongji University,2010 (in Chinese). [張棟.一類時滯神經(jīng)網(wǎng)絡(luò)系統(tǒng)的混沌行為與控制同步 [D].上海:同濟(jì)大學(xué),2010.]
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
