基于虛擬力的單個移動錨節點無線傳感器網絡定位算法*
2015-03-26 07:59:26高文根陳其工李云飛
傳感器與微系統 2015年1期
高文根,陳其工,江 明,李云飛
(安徽工程大學 安徽檢測技術與節能裝置省級實驗室,安徽 蕪湖241000)
0 引 言
無線傳感器網絡(WSNs)是一種自組織的分布式網絡,網絡中的節點相互獨立,節點中獲得的數據必須在融合數據或者事件發生位置的信息的基礎上才具備實際意義。因此,在無線傳感器網絡的節點部署、網絡覆蓋、目標跟蹤以及其他應用中,有效的節點位置信息都起著至關重要的作用[1~3]。因此,更加有效確定更高精度的節點位置的信息成為無線傳感器網絡領域的基礎問題之一[4,5]。
從運算方式角度,無線傳感器網絡定位算法可以分為[5~7]分布式和集中式。分布式定位算法主要依靠節點之間的信息傳遞和相應的數學模型,節點完成自身節點定位。集中式定位算法是節點將相應的信息傳遞至中心節點,由中心節點完成定位工作[8]。從定位方法角度,無線傳感器網絡定位算法可以分為免測距定位和測距定位。免測距定位方法主要依靠網絡間的通信來完成定位,主要包括DVHop、質心算法等[9];測距定位方法依靠節點配備相應的硬件設備,測得節點之間的距離或者角度的信息來完成節點的定位。
文獻[10]提出了五種虛擬力模型,都存在虛擬力為零的情況,導致移動錨節點失去牽引,不再移動,定位過程結束。同時,由于未知節點完成定位前和定位后,對移動錨節點虛擬力權重不變,導致節點可能出現局部死循環。為了解決上述問題,本文提出錨節點的狀態變量由卡爾曼濾波器控制和生成,并在錨節點能量受限和移動錨節點遍歷整個網絡條件下,進行了算法的驗證。仿真結果表明:該算法有效地提高了節點定位精度與網絡覆蓋率,且節點能耗低。
1 虛擬力模型
假設錨節點與未知節點之間會產生一種虛擬力,在虛擬力的牽引下,使錨節點移動到更合適的位置,為未知節點提供定位信息。在無線傳感器網絡中,常見的虛擬力模型主要有四種[10]。
在現有的四種虛擬力模型中,均存在虛擬力為零的情況,可能會導致在錨節點感知范圍內的零虛擬力區域的出現,即錨節點在此刻的位置或附近,與其他節點之間的虛擬力為零。在零虛擬力區域內的錨節點喪失虛擬力牽引,不再移動。而且,上述四種虛擬力都不具備對節點的本身屬性進行加權的特性,即對于已完成位置定位的節點,其作用在錨節點的虛擬力,在一定程度上需要被弱化;否則,可能帶來移動錨節點在局部區域進入循環移動,直到能量耗盡。
結合以上的分析,本文提出新的虛擬力模型,如下

其中,We1,We2為節點的加權矩陣,其結構如下

式中 ka1為虛擬力的調節參數,ka2在未知節點沒有完成定位之前,其值是零,在完成定位后,為了弱化相應的斥力或者引力,會更新ka2值。式(2)中的ke1,ke1亦具同樣作用。
同時,引入邊界的虛擬力,即

式中 Ak,B 分別為移動錨節點的位置信息和邊界信息,d為移動錨節點到邊界的橫向和縱向距離。
2 算法描述
對于單個移動錨節點,可將其位置信息作為卡爾曼濾波的觀察目標,將虛擬力的作用效果作為卡爾曼濾波器中的系統控制量,可以實現位置節點的定位,并且對移動傳感器的狀態進行實時的控制。
2.1 模型描述
根據前面的描述,對于移動錨節點的第k 個位置的狀態為

系統的測量方程為

其中,X(k)為移動錨節點的移動到第k 個位置的狀態,W(k),V(k)均為高斯白噪聲,X(k)的初始狀態為X(0),在受限范圍內隨機生成。
包括第k 時刻的移動速度、橫向移動系數和縱向移動系數,即

式中 α,β 分別為橫向移動方向、縱向移動方向。
U(k)為在第k 時刻的作用在錨節點上的虛擬力產生的狀態控制量,且

在測量方程中,Y(k)描述的是移動錨節點的第k 時刻與第k-1 時刻的之間位置變動的信息,因此

為了進一步觀測移動錨節點的位置

同樣,Z(k)為錨節點在第k 時刻的位置信息,其初始值Z(0),即錨節點的初始位置,在監測區域內隨機部署

推導可得到

由式(5)、式(6),可以得到

從式(6)、式(12)中可以看出:對于錨節點的移動狀態、到達的位置,都可以通過卡爾曼濾波器進行實時的控制和調節。
2.2 位置定位
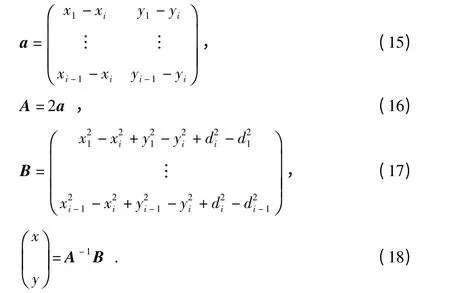
假設移動錨節點和未知節點之間的距離是可測的,例如:RSSI,AOA。在未知節點獲得三個或者三個以上的與移動錨節點的距離,就可以采用三邊測距法進行定位計算。假設未知節點獲得的i(i≥3)個錨節點的坐標和對應的距離分別為(xi,yi),di。根據Pythagoras 定理,可以得到

推導可以得到
3 仿真結果與分析
仿真實驗是在100 m×100 m 的區域進行,在監測區域內部署100 個位置節點,分別探究了在移動錨節點全定位的情況和移動錨節點在受限能量(正常能量的50%)情況下的移動和定位以及未知節點的能量消耗。
如圖1 所示,該定位算法的定位誤差要遠低于DVHop,說明該算法具有較高定位精度。
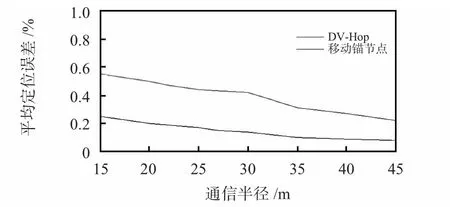
圖1 在全定位下的未知節點隨通信半徑變化的定位誤差Fig 1 Localization error of unknown nodes with communication radius change with all nodes to be located
結合圖2、圖3,移動錨節點活動較為頻繁的區域,很明顯該區域的未知節點的剩余能量會相對較低,但在整個能量系統中,定位過程所消耗的能量所占的比例還是很低的。因為在移動錨節點移動到該區域后,與該區域內未知節點進行相互通信,導致該區域的未知節點能量消耗增多。圖4表明:移動錨節點具有較高的覆蓋率。
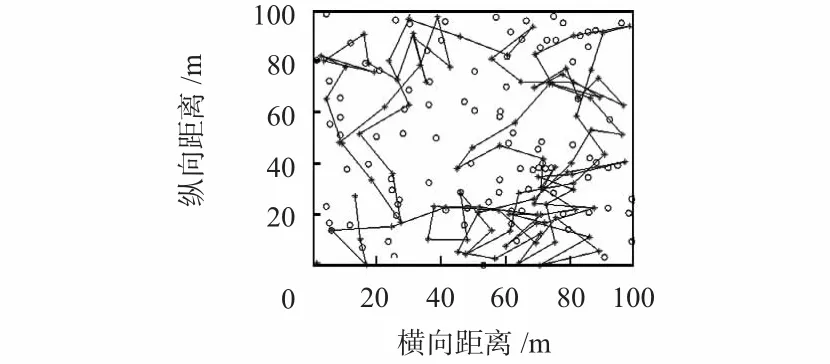
圖2 在全定位下的錨節點移動路徑圖Fig 2 Mobile path of anchor node with all nodes to be located
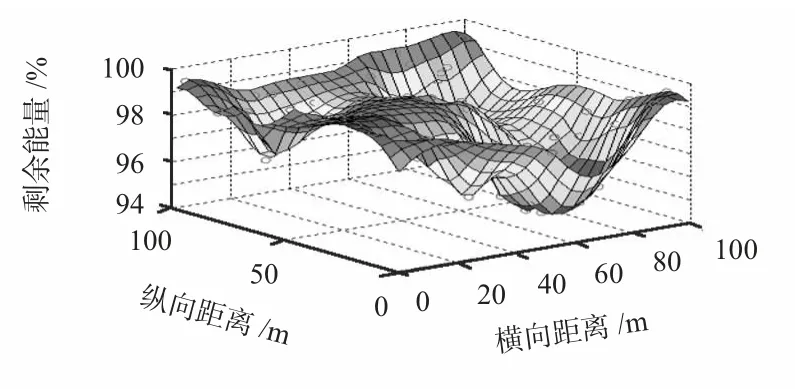
圖3 在全定位下的未知節點的剩余能量圖Fig 3 Surplus energy of unknown nodes with all nodes to be located
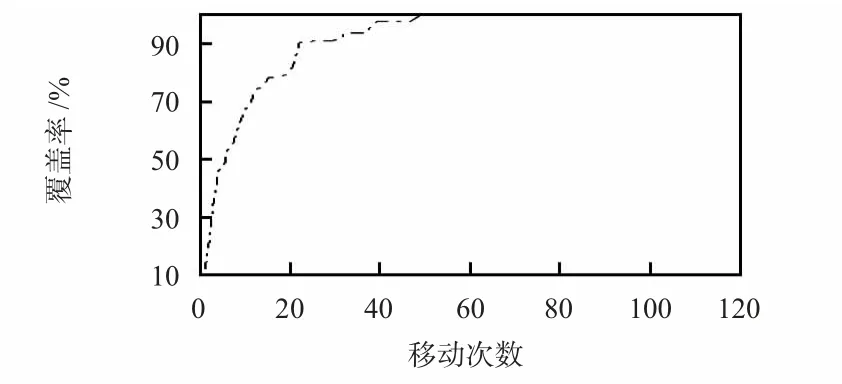
圖4 在全定位下的移動錨節點的覆蓋率圖Fig 4 Coverage rate of mobile anchor node with all nodes to be located
如圖5 是能量受限條件下移動錨節點的移動路徑;圖6表明:移動錨節點仍覆蓋了大部分未知節點。

圖5 在能量受限下的移動錨節點的移動路徑Fig 5 Mobile path of mobile anchor node with limited energy

圖6 在能量受限下的移動錨節點的覆蓋率Fig 6 Coverage rate of mobile anchor node with limited energy
綜上仿真和分析,該定位算法在定位精度、網絡剩余能量、網絡的覆蓋率等方面具有較好的性能,充分體現了該算法的有效性。
4 結 論
本文提出一種基于虛擬力的單個移動錨節點的定位算法,移動錨節點的狀態變量由虛擬力作用產生,且經過卡爾曼濾波器進行調節和控制,有效地避免移動錨節點進入零虛擬力區域和局部死循環。仿真結果表明:在全定位條件還是能量受限條件下,該算法有較高的定位精度,且對于整個網絡的能量消耗很小,提供很高的覆蓋率。
[1] 劉志興,劉 強.基于貝葉斯估計與虛擬力導向混合遺傳算法的無線傳感網絡定位方案[J].控制與決策,2013,28(6):889-903.
[2] 王建平,徐 恒,李奇越.基于卡爾曼濾波的礦井移動節點定位算法研究[J].電子測量與儀器學報,2013,27(2):120-126.
[3] 胡煒薇,胡 冀,應智花.基于一個移動錨節點的無線傳感器網絡節點定位算法[J].系統仿真學報,2010,20(4):978-982.
[4] 張正勇,孫 智,王 剛,等.基于移動錨節點的無線傳感器網絡節點定位[J].清華大學學報,2007,47(4):534-537.
[5] 李洪峻,卜彥龍,薛 晗,等.面向無線傳感器網絡節點定位的移動錨節點路徑規劃[J].計算機研究與發展,2009,46(1):129-136.
[6] 崔煥慶,王英龍,周傳愛.應用三個移動錨節點的非測距定位方法[J].山東大學學報,2011,30(1):53-57.
[7] Patro R K.Localization in wireless sensor with mobile anchors[C]∥Proceeding of 23rd IEEE Convention of Electric and Electronic Engineers,Israel,2004:22-24.
[8] Hidayet Aksu,Demet Aksoy,Ibrahim Korpeoglu.A study of localization metrics:Evaluation of position errors in wireless sensor networks[J].Computer Networks,2011,55(15):3562-3577.
[9] Woo S.Application of WiFi-based indoor positioning system for labor tracking at construction sites:A case study in Guangzhou MTR[J].Automation in Construction,2010,20(1):3-13.
[10]胡 淼,陶正蘇.一種基于可移動錨節點的DV-Hop 改進定位算法[J].電子設計工程,2011,19(24):98-101.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電測與儀表(2015年5期)2015-04-09 11:30:52