含間隙曲柄滑塊系統動力響應的隨機性分析
2014-09-06 10:04:02陳建軍曹鴻鈞云永琥
振動與沖擊 2014年11期
趙 寬, 陳建軍, 曹鴻鈞, 云永琥
(西安電子科技大學 電子裝備結構設計教育部重點實驗室,西安 710071)
在機構多體系統中,由于裝配誤差、摩擦磨損以及機構運動的需要,運動副間隙是不可避免的,這將導致機構的實際運動與理想運動之間出現偏差,且在運動過程中運動副會因間隙的存在出現瞬間失去接觸,待再接觸時將產生碰撞,從而引起振動、產生噪音、加速磨損,甚至會嚴重影響系統的動態性能,降低系統的運動精度、穩定性、可靠性以及使用壽命[1]。另一方面,由于制造、裝配、摩擦、沖擊、溫變等因素,將使包含間隙在內的機構系統的幾何參數和物理參數都具有一定的隨機性,綜合考慮這些隨機因素下的系統響應,將使分析結果更接近工程實際,同時也為含間隙系統的可靠性分析及優化設計奠定了基礎。
目前,國內外對關節間隙所帶來的動力學現象以及優化、控制等方面開展了許多研究工作。文獻[2]分別對含間隙鉸和潤滑鉸的機構系統進行了動力學研究,數值仿真表明接觸碰撞力對含間隙鉸系統的動力學特性有較大的影響,而潤滑鉸和理想鉸的性能十分接近。文獻[3]分別對含間隙和潤滑球鉸的空間柔性多體系統進行動力學分析。文獻[4]利用遺傳算法對含間隙鉸的曲柄滑塊機構的傳動角進行優化。文獻[5]基于Pyragas方法對含間隙鉸的曲柄滑塊機構進行穩定性分析。但在以上文獻的模型中是將所有參數和作用載荷均視為確定性量或參數,而實際上在隨機因素的作用下這些參數的取值可能呈現出某種程度的隨機性。對含有間隙的精密機械系統,參數的隨機性對系統動力特性的影響是不容忽視的。文獻[6-7]對無間隙的不確定參數彈性連桿機構的動力響應進行了分析。然而,對于含有間隙和摩擦的隨機參數多體系統的動力學分析研究卻鮮有報道。
本文基于以上研究成果,建立了含間隙和摩擦的曲柄滑塊系統的動力學模型,同時綜合考慮系統物理參數和幾何參數的隨機性,利用BP人工神經網絡的函數逼近能力,建立起系統基本隨機變量和系統動力響應間的映射關系,利用矩法獲得了各響應量的均值和均方差隨時間的變化規律,考察了系統各隨機參數對系統動力響應的影響,并通過Monte-Carlo(MC)模擬法對計算結果進行驗證,得出了一些有意義的結論。
1 曲柄滑塊系統運動的隨機性分析
圖1為曲柄滑塊系統理想模型的示意圖,曲柄AB和連桿BC的長度分別為L1和L2,曲柄以角速度ω繞支點A勻速轉動,則滑塊的位移xC可表為:
(1)

圖1 曲柄滑塊系統
設幾何參數L1和L2為相互獨立且服從正態分布的隨機變量,對上式利用矩法[8]可求得滑塊C在任意時刻位移xC的均值μC和均方差σC分別為:
(2)
(3)
式中,μL1和μL2分別為L1和L2的均值,σL1和σL2分別為L1和L2的均方差。
將式(1)對時間求導,同理可求出滑塊C的速度和加速度的均值和均方差。
2 含間隙曲柄滑塊系統的動力學建模
2.1 間隙旋轉鉸模型
由于旋轉鉸間隙的存在,使得系統成為變拓撲結構系統,一種是不含約束的自由運動;另一種是具有單邊約束的運動。目前處理鉸間隙問題主要有三種模型,一是無質量剛性桿模型,該模型無法考慮接觸時的沖擊效應,難以描述運動副間的動力特性以及碰撞對系統動力學的影響;二是等效彈簧阻尼模型,該模型難以描述碰撞過程中能量轉移的物理本質。為此,本文采用了第三種模型,將間隙鉸視為兩個彈性碰撞體,即圖2所示的旋轉鉸模型,設軸承和軸頸的半徑分別為rB和rJ,中心距為r,則間隙大小為:
rc=rB-rJ
(4)
軸承和軸頸接觸點的法向穿透深度為:
δBJ=r-rc
(5)

圖2 間隙旋轉鉸
目前,對于描述鉸間隙處碰撞接觸過程中力與位移之間的關系,最常用的有Hertz接觸力模型和Lankarani與Nikravesh提出的連續接觸力模型,前者是一種純彈性碰撞模型,不考慮碰撞過程中的能量損失,主要用于早期的碰撞問題;后者不僅考慮碰撞接觸速度、構件的材料屬性以及碰撞體的幾何特性等因素,而且有利于系統動力學方程的穩定求解,因此得到了廣泛的應用。故本文采用了后者,則軸承和軸頸法向接觸力Fn可表為[9]:
(6)

(7)
當兩間隙物體接觸后,由于切向摩擦力的作用會發生相對滑動或粘滯,進一步影響到整個間隙系統的運動和動力響應,因此有必要考慮摩擦力對系統動力響應的影響。對鉸間隙碰撞接觸處采用了Ambrosio提出的Coulomb摩擦模型,切向摩擦力的表達式為[11]:
(8)
式中,cd為動態修正系數;cf為動摩擦因數;vT為相對切向速度。
2.2 系統動力學模型
(9)

該方程綜合了旋轉間隙鉸脫離接觸自由運動和接觸碰撞兩個階段的運動模式,有利于實現系統整個運動過程的動力學仿真。
3 含間隙曲柄滑塊系統動力響應的隨機性分析
方程(9)為確定性系統的分析模型。現考慮系統具有隨機性的情況,假設含間隙曲柄滑塊系統中共有m0個相互獨立的服從正態分布的隨機參數,將這些隨機參數代入式(9)中,則系統模型成為含隨機參數的不確定性模型。由于含間隙的曲柄滑塊是一個變結構、含碰撞、非定常、且非線性很強的系統,利用傳統的算法難以對其進行隨機性分析,而神經網絡法較多項式響應面法具有更高的穩定性和更好的精度[13],因此,本文利用該方法獲得系統隨機參數和動力響應的近似函數關系式以及系統動力響應對各隨機參數的靈敏度,然后應用矩法對系統的動力響應進行隨機性分析。
3.1 BP神經網絡法


(10)
(11)
(12)
式中fi(·)(i=1,2)為傳遞函數。

3.2 系統動力響應的隨機性分析
(13)
式中Y(X)=[y1(X),y2(X),…,ym3(X)]。
由于系統動力響應的隨機性分析中需要系統動力響應的導數,即系統動力響應對各隨機參數的靈敏度,由復合函數的求導法則可得:
(14)
其中yl(l=1,2,…,m3)表示第l個系統動力響應,由矩法可得yl的均值和均方差分別為:
μyl=yl(μX)
(15)
(16)
綜合以上分析過程,給出利用BP神經網絡對含間隙和摩擦的曲柄滑塊系統隨機性分析的具體步驟如下:
(1) 選取廣義坐標,建立式(9)所示的系統動力學模型,具體建模和編程過程可參考文獻[12]和[14];
(2) 確定系統隨機輸入參數的分布類型,隨機抽取50組輸入參數,采用自適應4階龍哥庫塔算法求出與輸入隨機參數X相對應的系統動力響應Y;
(3) 以數據{X,Y}為學習訓練樣本,利用Levenberg-Marquardt法[7]對圖3所示的神經網絡進行訓練,得到系統動力響應的近似表達式,再由式(14)得到系統動力響應對各隨機參數的靈敏度;
(4) 利用式(15)和(16)求出系統動力響應的均值和均方差。
4 數值算例
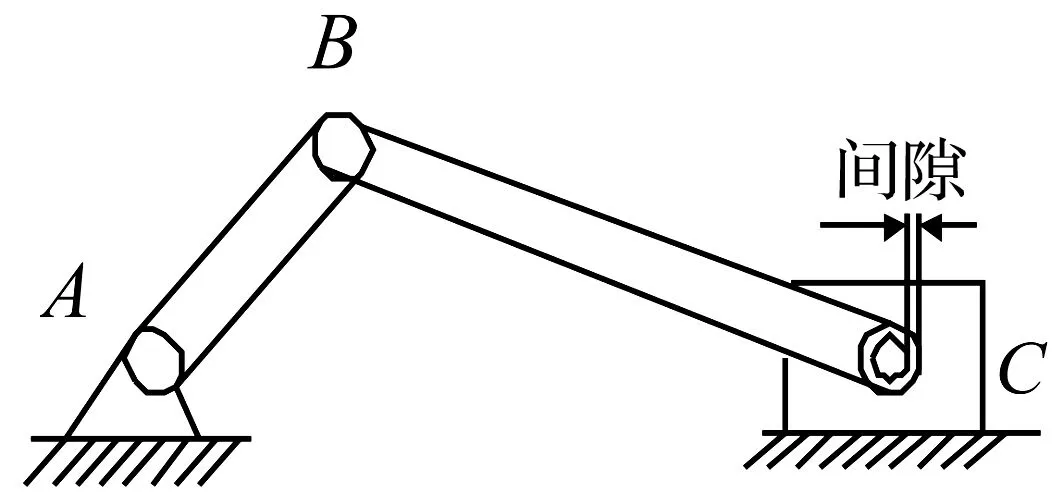
圖4 含間隙的曲柄滑塊系統
考慮間隙和摩擦的隨機參數曲柄滑塊系統如圖4所示,其中點A、B兩處為理想鉸,點C處為間隙鉸。曲柄以轉速150 r/min定軸旋轉,滑塊的質量為0.14 kg,取軸承和軸頸碰撞過程中的能量恢復系數ce為0.95。現考慮系統中曲柄和連桿的兩者的彈性模量E、長度Li(i=1,2)、質量mi(i=1,2)、轉動慣量Ii(i=1,2),以及軸承和軸頸的半徑rB和rJ、軸承和軸頸的滑動摩擦系數cf等均為相互獨立的正態分布隨機參數,它們的均值見表1。借助Matlab神經網絡工具箱編制程序,選取步長為10-6s,針對無間隙和摩擦的理想模型及含間隙和摩擦的間隙模型兩種情況,對一個周期內系統動力響應的隨機性進行分析,并將計算結果以時間歷程圖的方式給出。
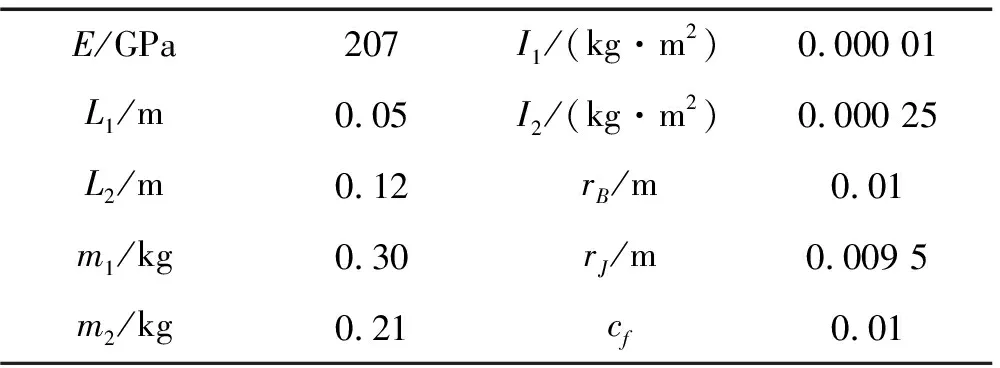
表1 系統構件尺寸及物理參數的均值
圖5、圖6分別給出了理想模型和考慮間隙的確定性模型其滑塊速度響應和加速度響應的時間歷程圖。圖7、圖9給出了系統各參數的變異系數均取0.01時滑塊速度均值和加速度均值在隨機參數理想模型和含間隙模型中隨時間變化的對比曲線。圖8、圖10給出了系統各隨機參數的變異系數均取0.01時滑塊速度均方差和加速度均方差在隨機參數理想模型和含間隙模型中隨時間變化的對比曲線。從這些圖中顯見:① 在確定性理想模型中,滑塊的速度和加速度響應是平滑的,而間隙模型中則有較大的波動,原因是在系統運動過程中,由于鉸間間隙和摩擦的存在,使得軸承和軸頸間發生從不接觸到接觸碰撞、再到不接觸的連續循環狀態,這與文獻[5]的計算結果相近,說明計算結果的正確性;② 滑塊速度和加速度的均值出現震蕩現象,這是由系統參數的隨機性使得間隙處接觸碰撞的時間發生微小改變而引起的;③ 與不考慮間隙和摩擦的隨機理想模型相比,含間隙模型中滑塊速度和加速度的均方差偏大,這有可能造成整個系統的功能失效或破壞,因此有必要就各隨機參數對系統動力響應的影響進行分析,從中找出關鍵參數以提高系統運動功能的可靠性。
為了考察各隨機參數的分散性對系統動力響應的影響,表2列出了在0.01 s時刻所有隨機參數的變異系數vall均取0(確定性模型)和0.01,以及同種類隨機參數的變異系數取0.01,而其余為0時滑塊位移、速度和加速度均值和均方差的計算結果,表中第4行為Monte-Carlo(MC)法模擬1 000次的結果。對表中結果分析可見:① 本文方法的結果與MC法模擬的結果兩者吻合較好,表明該方法的可行性; ② 與確定性模型相比,隨機模型中參數的隨機性對滑塊位移和速度的影響不大,但對加速度的影響較大;③ 在諸隨機參數中,彈性模量對系統動力響應隨機性的影響最小,轉動慣量次之,而間隙的影響最大。

圖5 滑塊速度的響應時程

圖8 滑塊速度均方差的時間歷程圖

表2 不同隨機參數對系統動力響應數字特征的影響
5 結 論
文中在考慮鉸間摩擦以及系統參數具有隨機性的情況下,對含間隙的曲柄滑塊系統其動力響應問題進行了分析。建立了系統的動力學模型,將BP神經網絡法拓展應用于含間隙及摩擦的曲柄滑塊系統的隨機性分析中,通過算例驗證了文中模型和方法的合理性和正確性,并得出以下結論:① 通過與MC法計算結果的對比表明,本文方法可行且具有一定的精度;② 系統參數的隨機性將有可能增強系統間隙處的碰撞,使系統動力響應的分散性增大;③ 系統參數的隨機性對含間隙系統動力響應的影響不容忽略,其中間隙的隨機性對系統動力響應分散性的影響最大。故欲提高系統的動力學性能,應首先降低該參數的分散性。
[1]Erkaya S, Uzmay I. Experimental investigation of joint clearance effects on the dynamics of a slider crank mechanism[J]. Multibody System Dynamics, 2010, 24(1): 81-102.
[2]Flores P, Amrosio J, Claro J C P, et al. A study on dynamics of mechanical systems including joints with clearance and lubrication[J]. Mechanism and Machine Theory, 2006, 41(3): 247-261.
[3]TIAN Qiang, ZHANG Yun-qing, CHEN Li-ping, et al. Dynamics of spatial flexible multibody systems with clearance and lubricated spherical joints[J]. Computers and Structures, 2009, 87(13-14): 913-929.
[4]Erkaya S, Uzmay I. Optimization of transmission angle for slider-crank mechanism with joint clearance[J]. Struct Multidisc Optim, 2009, 37(5): 493-508.
[5]Olyaei A A, Ghazavi M R. Stabilizing slider-crank mechanism with clearance joints[J]. Mechanism and Machine Theory, 2012, 53: 17-29.
[6]魏永祥, 陳建軍, 馬洪波,等. 隨機參數彈性連桿在平穩隨機激勵下的動力可靠性分析[J]. 機械工程學報, 2012, 48(2): 36-43.
WEI Yong-xiang, CHEN Jian-jun, MA Hong-bo, et al. Dynamic reliability analysis of elastic linkage mechanism with stochastic parameters under stationary random excitation[J]. Journal of Mechanical Engineering, 2012, 48(2): 36-43.
[7]拓耀飛, 陳建軍, 陳永琴,等. 基于神經網絡的彈性連桿機構動力響應分析[J]. 西安電子科技大學學報, 2006, 33(5): 711-715.
TUO Yao-fei, CHEN Jian-jun, CHEN Yong-qin, et al. Dynamic analysis of the elastic linkage mechanism based on the artificial neutral network[J]. Journal of Xidian University, 2006, 33(5): 711-715.
[8]陳建軍. 機械與結構系統的可靠性[M]. 西安: 西安電子科技大學出版社, 1995.
[9]Lankarani H M, Nikravesh P E. A contact force model with hysteresis damping for impact analysis of multibody systems[J]. Journal Mechancal Design, 1990, 112(3): 369-376.
[10]Dubowsky S, Freudenstein F. Dynamic analysis of mechanical systems with clearances, part 1: formation of dynamic model[J]. Journal of Engineering for Industry, 1971, 93(1): 305-309.
[11]Flores P. Dynamic analysis of mechanical systems with imperfect kinematic joint[D]. University of Minho, Guimaraes, Portugal, 2005.
[12]Flores P, Ambrosio J. On the contact detection for contact-impact analysis in multibody systems[J]. Multibody System Dynamics, 2010, 24(1): 103-122.
[13]段巍, 王璋奇. 利用響應面方法的汽輪機葉片振動可靠性分析[J]. 振動、測試與診斷, 2012, 32(1): 84-90.
DUAN Wei, WANG Zhang-qi. Vibration reliability of turbine blade based on response surface method[J]. Journal of Vibration, Measurement & Diagnosis, 2012, 32(1): 84-90.
[14]Nikravesh P E. Computer aided analysis of mechanical systems[M]. Prentice Hall, Englewood Cliffs, New Jersey, 1988.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19