胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚研究進(jìn)展與分析
2014-01-13 10:11:48譚進(jìn)波王揚(yáng)威顧寶彤趙東標(biāo)
微特電機(jī) 2014年10期
關(guān)鍵詞:研究
譚進(jìn)波,王揚(yáng)威,顧寶彤,趙東標(biāo)
(南京航空航天大學(xué),南京210016)
0 引 言
隨著對海洋資源開發(fā)利用的不斷深入,海底勘探作業(yè)、海洋生態(tài)環(huán)境考察以及海洋軍事戰(zhàn)略等領(lǐng)域?qū)ψ灾魉聶C(jī)器人(AUV)的要求越來越高。作為自主水下機(jī)器人的一個(gè)分支,仿生水下機(jī)器人隨著水動(dòng)力學(xué)、仿生學(xué)和自動(dòng)控制等學(xué)科的發(fā)展及先進(jìn)制造技術(shù)、智能材料的應(yīng)用,逐漸成為研究的熱點(diǎn)[1-3]。
仿生水下機(jī)器人是一類以水生生物為仿生原型,模仿其游動(dòng)或推進(jìn)模式而設(shè)計(jì)出的能夠?qū)崿F(xiàn)水下交互作業(yè)的機(jī)器人[4],在眾多水生生物中,魚類因其非凡的水下運(yùn)動(dòng)能力以及游動(dòng)時(shí)高效、低噪和高機(jī)動(dòng)性的特點(diǎn)倍受各國仿生科研工作者的青睞。近幾十年來,各類性能優(yōu)異的仿生機(jī)器魚相繼問世,大大提高了仿生水下機(jī)器人的游動(dòng)效率、機(jī)動(dòng)性和應(yīng)對水下復(fù)雜環(huán)境的能力,充分展示了其廣闊的應(yīng)用前景和潛在價(jià)值。仿生機(jī)器魚根據(jù)其仿生原型游動(dòng)方式的不同可分為兩類:身體/尾鰭(body/caudal fin,BCF)推進(jìn)模式和中央鰭/對鰭(median/paired fin,MPF)推進(jìn)模式[5]。BCF 推進(jìn)模式仿生機(jī)器魚最早問世,經(jīng)過近二十年的研究發(fā)展,已取得眾多成果。MPF 推進(jìn)模式仿生機(jī)器魚雖然出現(xiàn)較晚,但在低速游動(dòng)下的推進(jìn)效率、機(jī)動(dòng)性和穩(wěn)定性較BCF 模式更為出色[6],更加適應(yīng)水下勘測和偵察作業(yè),其中鰩科模式(Rajiform)的胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚具有優(yōu)異的游動(dòng)性能,已成為仿生機(jī)器魚研究領(lǐng)域的新興熱點(diǎn)。近年來,科研人員已對胸鰭波動(dòng)推進(jìn)機(jī)理進(jìn)行了相關(guān)研究,并研制出了各類仿生機(jī)器魚。
1 胸鰭波動(dòng)推進(jìn)模式特征
采用胸鰭波動(dòng)推進(jìn)模式游動(dòng)的水生生物主要有軟骨魚綱中的鰩形目、鲼形目和烏賊等,依據(jù)對生物胸鰭波動(dòng)運(yùn)動(dòng)的游動(dòng)觀測結(jié)果和理論分析,胸鰭波動(dòng)推進(jìn)模式的游動(dòng)特征可歸納為:
(1)胸鰭圍繞在身體兩側(cè)或周圍,得益于軟骨支撐結(jié)構(gòu)或肌肉性靜水骨骼結(jié)構(gòu),胸鰭能實(shí)現(xiàn)柔性的波動(dòng)運(yùn)動(dòng)。
(2)胸鰭波動(dòng)運(yùn)動(dòng)呈近似正弦波的形式,波動(dòng)運(yùn)動(dòng)的幅度、頻率和傳播方向根據(jù)運(yùn)動(dòng)方式不同而各異,單側(cè)胸鰭上呈現(xiàn)至少一個(gè)完整的推進(jìn)波。
(3)通過雙側(cè)胸鰭的同步或異步波動(dòng)配合魚體可實(shí)現(xiàn)巡游、起/停、轉(zhuǎn)向及姿態(tài)保持等游動(dòng)動(dòng)作[7],游動(dòng)動(dòng)作靈活,機(jī)動(dòng)性高。
(4)巡游時(shí)胸鰭波動(dòng)運(yùn)動(dòng)呈整數(shù)個(gè)波形,魚體幾乎不產(chǎn)生上下振動(dòng),沒有尾鰭擺動(dòng)魚類的舵首擺動(dòng)問題,游動(dòng)穩(wěn)定性好。
胸鰭波動(dòng)推進(jìn)水生生物所擁有的這些特征,使得以其為原型的仿生樣機(jī)具有推進(jìn)高效、低速穩(wěn)定和高機(jī)動(dòng)性的特點(diǎn),同時(shí)樣機(jī)主體不參與運(yùn)動(dòng),可以降低樣機(jī)的結(jié)構(gòu)設(shè)計(jì)難度,提高承載能力,還能有效避免游動(dòng)時(shí)身體擺動(dòng)導(dǎo)致的形滯阻力[8]。
2 國內(nèi)外研究現(xiàn)狀
2.1 胸鰭波動(dòng)推進(jìn)機(jī)理研究現(xiàn)狀
胸鰭的柔性波動(dòng)運(yùn)動(dòng)是游動(dòng)動(dòng)力的主要來源,對其推進(jìn)機(jī)理的研究不僅可以揭示此種游動(dòng)模式高效、高機(jī)動(dòng)的流體力學(xué)機(jī)制,還能為仿生機(jī)器魚的研制提供簡化的生物學(xué)、運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)模型。推進(jìn)機(jī)理研究主要有理論研究、實(shí)驗(yàn)觀測研究和數(shù)值模擬與仿真三種方法。國內(nèi)外學(xué)者對魚類推進(jìn)理論開展了大量的研究工作,目前已發(fā)展成熟的波動(dòng)推進(jìn)理論根據(jù)其選取的主要作用力的不同可分為僅適用于微小水生生物游動(dòng)時(shí)低雷諾數(shù)情況下的抗力理論和適用于魚類游動(dòng)時(shí)高雷諾數(shù)情況下的作動(dòng)盤理論、細(xì)長體理論及波動(dòng)板理論,以上推進(jìn)理論主要用于BCF 推進(jìn)模式的運(yùn)動(dòng)分析。鰭波動(dòng)推進(jìn)模式的理論研究起步較晚,但隨著近年來重視程度的提高,其研究進(jìn)展迅速。Daniel 通過應(yīng)用非定常翼型理論和葉片元理論對鰩科模式水動(dòng)力特性進(jìn)行研究,分析了鰭形狀和波動(dòng)參數(shù)對推進(jìn)性能的影響[9]。Lighthill 與Blake 應(yīng)用由細(xì)長體理論(EBT)擴(kuò)展而來的大擺幅細(xì)長體理論研究了鱗鲀科模式(Balistiform)和裸背鰻科模式(Gymnotiform)魚類柔性長鰭波動(dòng)的推進(jìn)性能,試圖揭示波動(dòng)鰭與魚體之間的相互耦合作用對推進(jìn)性能的影響[10]。Rahman 等建立了雙波動(dòng)鰭仿生機(jī)器魚模型的六自由度運(yùn)動(dòng)學(xué)方程,基于對模型試驗(yàn)與CFD(Computational fluid dynamics)計(jì)算的準(zhǔn)定常假設(shè),得到了模型運(yùn)動(dòng)產(chǎn)生的流體力和力矩的表達(dá)式[11]。國內(nèi)的章永華等對仿生機(jī)器藍(lán)點(diǎn)魟的胸鰭進(jìn)行建模,得到了鰭條擺動(dòng)和鰭面波動(dòng)的運(yùn)動(dòng)學(xué)方程并計(jì)算了受到的流體阻力和蒙皮彈性變形阻力,最后采用大擺幅細(xì)長體理論得到了單位長度的鰭面在一定時(shí)間內(nèi)運(yùn)動(dòng)所產(chǎn)生的平均推力[12]。中科院自動(dòng)化研究所魏清平等對胸鰭模型的運(yùn)動(dòng)提出三點(diǎn)假設(shè),從而得到了一個(gè)運(yùn)動(dòng)周期內(nèi)胸鰭波動(dòng)產(chǎn)生的平均推力的解析表達(dá)式,分析表明波動(dòng)推進(jìn)力的大小與胸鰭的擺動(dòng)頻率、幅度及波長、波數(shù)有關(guān)[13]。
實(shí)驗(yàn)觀測研究是分析胸鰭波動(dòng)推進(jìn)機(jī)理最為直接的手段,分為仿生原型的觀測研究和仿生樣機(jī)的水下試驗(yàn)研究。仿生原型的觀測研究主要通過高速攝影、肌電圖(EMG)和數(shù)字式粒子圖像測速(DPIV)等技術(shù)對仿生對象的形態(tài)學(xué)、生理學(xué)、運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行測量,研究這些參數(shù)與波動(dòng)推進(jìn)性能之間的關(guān)系。1999 年,Rosenberger 等采用攝影技術(shù)和EMG 技術(shù)對不同游動(dòng)速度下藍(lán)點(diǎn)魟的胸鰭運(yùn)動(dòng)模式和胸鰭肌肉驅(qū)動(dòng)模式進(jìn)行研究,研究表明胸鰭的波動(dòng)運(yùn)動(dòng)是由背部和腹部肌肉交替活動(dòng)產(chǎn)生;隨著藍(lán)點(diǎn)魟?dòng)嗡俚脑龃螅伥挷▌?dòng)頻率、波速、波長及胸鰭肌肉活動(dòng)的占空比均增加,而波幅和肌肉活動(dòng)持續(xù)時(shí)間保持不變[14]。Blevins 和Lauder 通過三臺高速攝像機(jī)獲取淡水魟魚在不同游速下胸鰭波動(dòng)曲面的精確數(shù)據(jù),首次對魟魚波動(dòng)胸鰭進(jìn)行了三維運(yùn)動(dòng)分析,分析顯示淡水魟魚的游速主要由胸鰭波動(dòng)頻率和波速決定,波幅只起到次要作用[15]。隨后他們又使用DPIV 技術(shù)研究了地面效應(yīng)對波動(dòng)鰭推進(jìn)性能的影響[16]。仿生樣機(jī)的水下試驗(yàn)研究是通過測試平臺對樣機(jī)的水下游動(dòng)進(jìn)行測試,分析胸鰭波動(dòng)參數(shù)對推進(jìn)性能的影響。荷蘭代爾伏特理工大學(xué)的研究小組為研究胸鰭擺幅、頻率和波數(shù)對推進(jìn)力的影響,對仿生胸鰭模型進(jìn)行了水下推進(jìn)測試,試驗(yàn)結(jié)果顯示推進(jìn)力隨波幅、波頻的增加而顯著增加,而隨波數(shù)增加的趨勢不明顯[17]。章永華等對仿生藍(lán)點(diǎn)魟胸鰭模型進(jìn)行了試驗(yàn),分析在波幅逐漸增大和等波幅兩種胸鰭波動(dòng)模式下,擺動(dòng)頻率、幅度和波長的變化對推進(jìn)力的影響,并對兩種波動(dòng)模式的推進(jìn)性能進(jìn)行了比較[18]。魏清平等對雙波動(dòng)鰭仿生機(jī)器魚樣機(jī)進(jìn)行了單側(cè)胸鰭的推力試驗(yàn)和整體樣機(jī)的游動(dòng)試驗(yàn),測量了直線游動(dòng)速度和轉(zhuǎn)動(dòng)角速度隨波動(dòng)頻率的變化,同時(shí)結(jié)合運(yùn)動(dòng)學(xué)和水動(dòng)力學(xué)模型分析了波動(dòng)參數(shù)與游動(dòng)性能之間的關(guān)系[13]。
隨著計(jì)算機(jī)技術(shù)的發(fā)展以及數(shù)值計(jì)算方法和流體仿真軟件的成熟,計(jì)算流體力學(xué)(CFD)得到了廣泛的應(yīng)用,CFD 數(shù)值模擬與仿真也成為研究魚類游動(dòng)水動(dòng)力學(xué)的有效方法。通過對胸鰭波動(dòng)的流場控制方程進(jìn)行數(shù)值計(jì)算,獲取流場內(nèi)各個(gè)位置上基本物理量(如速度、壓力等)和渦流的分布特性,確定這些量隨時(shí)間的變化情況,可以幫助揭示胸鰭波動(dòng)推進(jìn)模式的水動(dòng)力學(xué)機(jī)制[19]。日本大阪大學(xué)的研究小組一直致力于使用CFD 方法研究仿生波動(dòng)鰭的流體動(dòng)力學(xué),他們通過對雙波動(dòng)鰭仿生樣機(jī)胸鰭周圍的流場進(jìn)行計(jì)算機(jī)數(shù)值分析,建立起波動(dòng)側(cè)鰭的主要運(yùn)動(dòng)參數(shù)與水動(dòng)力之間的簡單關(guān)系,其分析結(jié)果與樣機(jī)的試驗(yàn)測量結(jié)果一致[20]。章永華等對仿生波動(dòng)胸鰭模型進(jìn)行了大量的數(shù)值研究,他們分別對不同運(yùn)動(dòng)參數(shù)、波動(dòng)模式和鰭面形狀下的波動(dòng)鰭進(jìn)行數(shù)值計(jì)算,分析它們對推進(jìn)性能的影響,還研究了波動(dòng)過程中的流場特性和尾跡渦結(jié)構(gòu),試圖從渦動(dòng)力學(xué)角度分析推力產(chǎn)生的機(jī)理[7,18,21]。陳維山等利用Fluent 軟件仿真實(shí)現(xiàn)了仿鰩魚機(jī)器人的自主游動(dòng),研究了鰩魚游動(dòng)時(shí)與周圍流場的相互作用并定量分析了波動(dòng)參數(shù)對游動(dòng)性能的影響[22]。
2.2 胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚樣機(jī)研制現(xiàn)狀
國內(nèi)外胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚的研制雖然起步較晚,但隨著對胸鰭波動(dòng)推進(jìn)機(jī)理的逐步探索以及仿生技術(shù)、先進(jìn)制造技術(shù)和控制技術(shù)的成熟,仿生機(jī)器魚樣機(jī)的研制已取得眾多成果。
2002 年,加拿大英屬哥倫比亞大學(xué)的研究小組對鰩科模式(Rajiform)在水下推進(jìn)器領(lǐng)域的應(yīng)用進(jìn)行了初步探索和嘗試。他們以小尾燕魟為原型研制了仿生胸鰭模型[23],如圖1(a)所示。仿生胸鰭使用形狀記憶合金(Shape memory alloy,SMA)絲作為鰭面的線性驅(qū)動(dòng)器,能夠產(chǎn)生期望的靜態(tài)波形,但由于SMA 絲的安裝等問題,難以獲得理想的動(dòng)態(tài)變形,胸鰭模型的游動(dòng)試驗(yàn)結(jié)果顯示其無法產(chǎn)生足夠?qū)崿F(xiàn)自驅(qū)動(dòng)的推進(jìn)力。
日本大阪大學(xué)的研究人員為研究環(huán)境擾動(dòng)小、推進(jìn)效率高的AUV,先后研制了四代仿烏賊雙波動(dòng)鰭水下機(jī)器人,目前用于試驗(yàn)的是2009 年研制的第四代樣機(jī)[11,24],如圖1(b)所示。第四代仿生樣機(jī)的側(cè)鰭由17 個(gè)伺服電機(jī)驅(qū)動(dòng),通過伺服控制器控制胸鰭的波動(dòng)運(yùn)動(dòng),樣機(jī)能產(chǎn)生6 自由度運(yùn)動(dòng),可自由航行和偏轉(zhuǎn)且對流體的擾動(dòng)很小。通過采用無線局域網(wǎng)通信技術(shù)和三向重力中心調(diào)整系統(tǒng),解決了前一代樣機(jī)通訊距離短及垂直重力中心調(diào)整存在局限的問題,增加了運(yùn)動(dòng)范圍,提升了游動(dòng)靈活性。
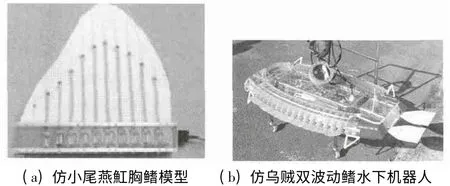
圖1 加拿大英屬哥倫比亞大學(xué)和日本大阪大學(xué)研制的仿生機(jī)器魚樣機(jī)
2005 年,新加坡南洋理工大學(xué)K. H. Low 等人采用模塊化的概念研制了一款雙鰭波動(dòng)仿生機(jī)器魚[25],如圖2(a)所示。其單側(cè)胸鰭可分為10 個(gè)鰭單元,每個(gè)鰭單元采用一臺伺服電機(jī)在鰭條基部產(chǎn)生一個(gè)自由度的轉(zhuǎn)動(dòng),連接于其上的曲柄作為鰭條,相鄰鰭單元之間由柔性鰭膜通過滑塊連接。通過控制伺服電機(jī),使相鄰的鰭條按一定的相位差擺動(dòng),從而在仿生胸鰭上產(chǎn)生不同波速、波幅及波數(shù)的類正弦波波形,水箱試驗(yàn)顯示樣機(jī)能實(shí)現(xiàn)20 cm/s 的最大游速。
日本名古屋大學(xué)的研究人員于2006 年研制了一款采用人工肌肉IPMC (Ionic polymer-metal composite)作為驅(qū)動(dòng)器的仿鰩科模式機(jī)器魚[26],如圖2(b)所示。機(jī)器魚的主體采用塑料泡沫制作,內(nèi)置控制器、放大器、DC/DC 轉(zhuǎn)換器和鋰電池。單側(cè)胸鰭由8 根IPMC 和一層聚乙烯薄膜組成,鰭長75 mm,寬45 mm。通過在不同的控制參數(shù)下對胸鰭進(jìn)行游動(dòng)試驗(yàn),測得其最大推進(jìn)速度為18.1 mm/s。
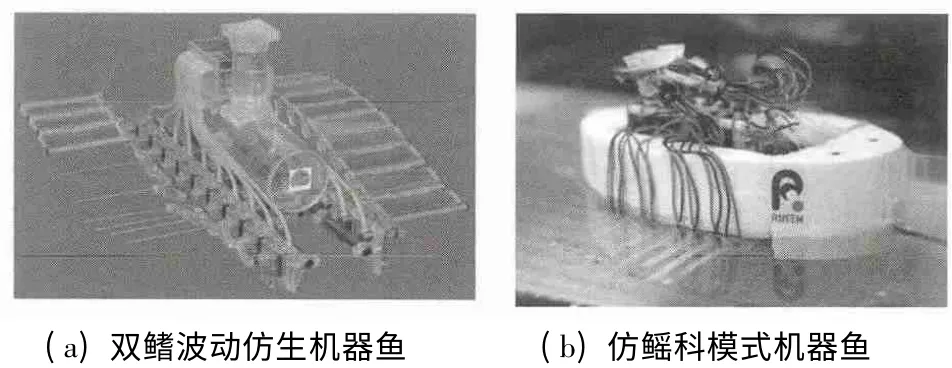
圖2 新加坡南洋理工大學(xué)和日本名古屋大學(xué)研制仿生機(jī)器魚樣機(jī)
荷蘭代爾伏特理工大學(xué)的研究小組于2009 年研制出了胸鰭波動(dòng)仿生水下機(jī)器人Galatea[17],如圖3(a)所示。Galatea 的殼體基于Wortmann FX 71-L-150/20 翼型設(shè)計(jì),兩側(cè)各裝有17 個(gè)伺服電機(jī),通過帶動(dòng)鰭條擺動(dòng)形成推進(jìn)波,結(jié)合安裝于機(jī)體尾部兩塊副翼的上下擺動(dòng),Galatea 可以實(shí)現(xiàn)前進(jìn)、后退、俯仰、回轉(zhuǎn)、繞垂直軸偏轉(zhuǎn)及懸停等機(jī)動(dòng)動(dòng)作。
2010 年,麻省理工學(xué)院(MIT)研制了擁有柔性機(jī)體的仿魟魚水下機(jī)器人[27],如圖3(b)所示。通過參數(shù)化魟魚的運(yùn)動(dòng),提出簡化的胸鰭驅(qū)動(dòng)設(shè)計(jì)方法:胸鰭采用柔性材料制作,僅在其前端對稱安裝兩根鰭條并由伺服電機(jī)驅(qū)動(dòng),身體中央安裝用于控制沉浮的浮力箱。兩款樣機(jī)外形均模仿魟魚,體長為0.225 m,圖3(b)中左側(cè)樣機(jī)的胸鰭采用單一的硅橡膠制作,右側(cè)的則由兩種不同的硅橡膠制成。游動(dòng)試驗(yàn)結(jié)果顯示右側(cè)樣機(jī)的游動(dòng)性能更好,在胸鰭擺動(dòng)頻率為2.5 Hz 時(shí),最大游速能達(dá)到0.37 BL/s(每秒游過的體長倍數(shù))。

圖3 荷蘭代爾伏特理工大學(xué)和麻省理工學(xué)院研制的仿生機(jī)器魚樣機(jī)
國內(nèi)也相繼研制出多種胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚樣機(jī)。2009 年,中科院自動(dòng)化研究所研制了一臺雙波動(dòng)鰭推進(jìn)仿生機(jī)器魚[13,28],如圖4(a)所示。雙側(cè)胸鰭由均布的10 根鰭條和彈性薄膜組成,驅(qū)動(dòng)器采用伺服電機(jī),控制系統(tǒng)基于FPGA。通過對機(jī)器魚運(yùn)動(dòng)控制策略進(jìn)行設(shè)計(jì),實(shí)現(xiàn)了樣機(jī)不同的游動(dòng)動(dòng)作。水池試驗(yàn)顯示其能完成前進(jìn)、后退、旋轉(zhuǎn)和側(cè)向游動(dòng)四種基本動(dòng)作,當(dāng)鰭條擺動(dòng)頻率為2.2 Hz時(shí),最大游速能達(dá)到0.37 m/s。
中國科學(xué)技術(shù)大學(xué)章永華等人基于仿生對象藍(lán)點(diǎn)魟的形態(tài)學(xué)、生理學(xué)及運(yùn)動(dòng)學(xué)特征研制了仿生機(jī)器藍(lán)點(diǎn)魟[7,12]如圖4(b)所示。仿生藍(lán)點(diǎn)魟?dòng)? 對模塊化的鰭條單元、固定底板、安裝盒和重心調(diào)節(jié)機(jī)構(gòu)組成。對仿生藍(lán)點(diǎn)魟的機(jī)動(dòng)性和穩(wěn)定性游動(dòng)試驗(yàn)表明其轉(zhuǎn)彎半徑很小,機(jī)動(dòng)性高;游動(dòng)的旋轉(zhuǎn)角、俯仰角和偏航角波動(dòng)不大,穩(wěn)定性好。
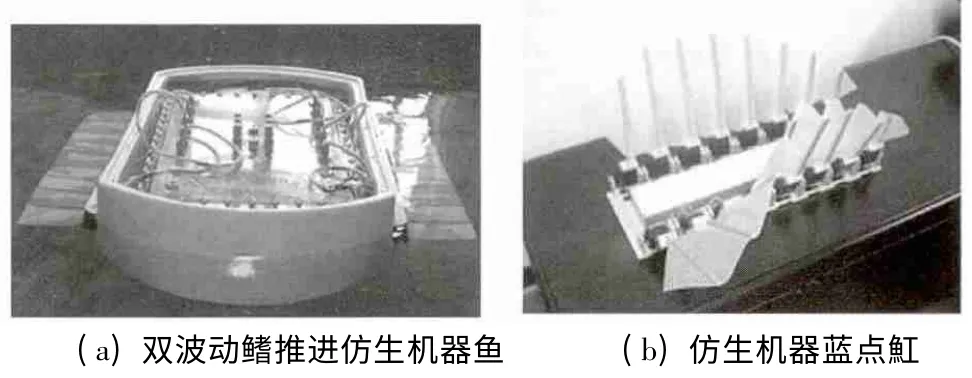
圖4 中科院自動(dòng)化研究所和中國科學(xué)技術(shù)大學(xué)研制的仿生機(jī)器魚樣機(jī)
2008 年,哈爾濱工業(yè)大學(xué)王振龍等人研制了仿烏賊鰭水下推進(jìn)器[29],如圖5(a)所示。仿生推進(jìn)器采用由5 對SMA 絲驅(qū)動(dòng)的柔性鰭單元模擬烏賊胸鰭的肌肉性靜水骨骼結(jié)構(gòu)。游動(dòng)試驗(yàn)顯示胸鰭能夠?qū)崿F(xiàn)柔性的動(dòng)作,最大游速達(dá)到了40 mm/s,最大轉(zhuǎn)向速度能達(dá)到22 (°)/s。隨后又研制了一款采用鰭波動(dòng)推進(jìn)和噴射推進(jìn)復(fù)合運(yùn)動(dòng)方式的仿生墨魚水下機(jī)器人[30-31],如圖5(b)所示。其波動(dòng)胸鰭同樣采用SMA 絲驅(qū)動(dòng),噴射推進(jìn)則由仿生外套膜的柔性擴(kuò)張和收縮實(shí)現(xiàn)。游動(dòng)試驗(yàn)顯示樣機(jī)能實(shí)現(xiàn)前進(jìn)、后退和原地轉(zhuǎn)彎等機(jī)動(dòng)性動(dòng)作,鰭波動(dòng)推進(jìn)的最高游速可達(dá)25 mm/s,旋轉(zhuǎn)游動(dòng)速度可達(dá)9 (°)/s;噴射推進(jìn)的最大速度能達(dá)到35 mm/s。
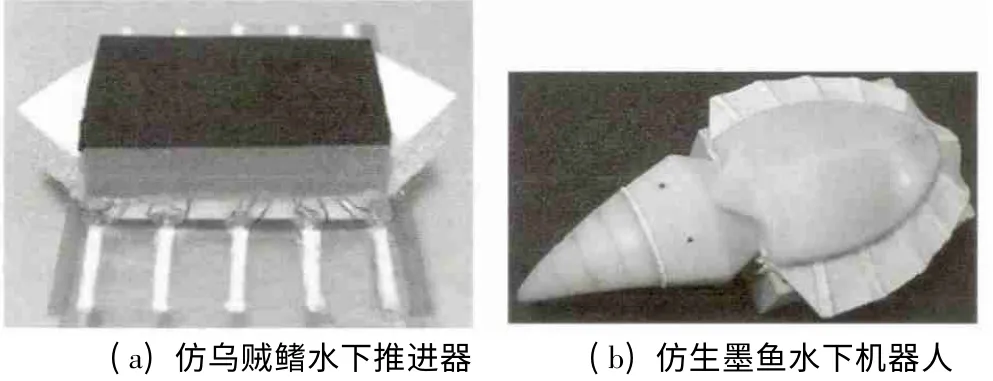
圖5 哈爾濱工業(yè)大學(xué)研制的仿生機(jī)器魚樣機(jī)
3 胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚研究的關(guān)鍵技術(shù)
(1)胸鰭波動(dòng)推進(jìn)機(jī)理研究
胸鰭波動(dòng)推進(jìn)機(jī)理的研究能夠揭示其高效高機(jī)動(dòng)的流體動(dòng)力學(xué)機(jī)制,為仿生機(jī)器魚的系統(tǒng)設(shè)計(jì)提供理論基礎(chǔ)。胸鰭波動(dòng)推進(jìn)理論在對波動(dòng)游動(dòng)過程做出假設(shè)的基礎(chǔ)上建立波動(dòng)運(yùn)動(dòng)學(xué)和水動(dòng)力學(xué)模型,可用于分析波動(dòng)運(yùn)動(dòng)與流體力之間的關(guān)系。實(shí)驗(yàn)觀測研究不僅能分析胸鰭生理學(xué)、運(yùn)動(dòng)學(xué)等參數(shù)對波動(dòng)推進(jìn)性能的影響,還能為理論推導(dǎo)結(jié)果提供驗(yàn)證,為仿生機(jī)器魚樣機(jī)的設(shè)計(jì)提供實(shí)驗(yàn)數(shù)據(jù)。CFD 數(shù)值模擬與仿真技術(shù)可以揭示波動(dòng)運(yùn)動(dòng)的流場特性和尾跡渦街的分布情況,也能對仿生機(jī)器魚樣機(jī)設(shè)計(jì)進(jìn)行優(yōu)化。以上三種研究方法均有各自的優(yōu)點(diǎn),因此,通過將這三種方法巧妙地結(jié)合,系統(tǒng)地開展胸鰭波動(dòng)推進(jìn)機(jī)理的研究,能夠起到相互補(bǔ)充、相互驗(yàn)證的作用,為胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚的研制提供指導(dǎo)。
(2)仿生柔性胸鰭及機(jī)器魚結(jié)構(gòu)設(shè)計(jì)
目前,胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚胸鰭的設(shè)計(jì)主要基于“結(jié)構(gòu)仿生”思想,大多采用剛性骨架和柔性鰭膜模擬仿生原型胸鰭的組成,但仿生胸鰭的剛性結(jié)構(gòu)無法實(shí)現(xiàn)鰭面的復(fù)雜運(yùn)動(dòng)變形,胸鰭波動(dòng)動(dòng)作的柔性及推進(jìn)性能與仿生原型仍有一定差距。因此,合理選擇仿生胸鰭鰭條的數(shù)量、材料、長度、沿機(jī)體的分布以及鰭膜的材料和形狀,可以有效提升胸鰭波動(dòng)柔性及樣機(jī)整體的游動(dòng)性能。
胸鰭波動(dòng)仿生機(jī)器魚的主體設(shè)計(jì)包括主體外形設(shè)計(jì)和內(nèi)部結(jié)構(gòu)設(shè)計(jì)。流線型的主體能夠極大提升機(jī)器魚水下游動(dòng)性能,提高游動(dòng)速度;合理的機(jī)體內(nèi)部結(jié)構(gòu)可以提高機(jī)器魚的防水耐壓性能,增加載重量,因此,利用流體仿真軟件對仿生機(jī)器魚外形進(jìn)行優(yōu)化設(shè)計(jì)以及對樣機(jī)內(nèi)部進(jìn)行合理布置是胸鰭波動(dòng)仿生機(jī)器魚能夠?qū)嶋H應(yīng)用的關(guān)鍵技術(shù)。
(3)多游動(dòng)模式融合推進(jìn)技術(shù)
已研制的胸鰭波動(dòng)仿生機(jī)器魚具有較高的機(jī)動(dòng)性和穩(wěn)定性,但樣機(jī)整體的推進(jìn)速度較低。因此,通過采用多游動(dòng)模式融合推進(jìn)技術(shù),在胸鰭波動(dòng)推進(jìn)的基礎(chǔ)上融合尾鰭或噴射等推進(jìn)技術(shù),合理地配置各個(gè)推進(jìn)技術(shù)的使用,可以使機(jī)器魚兼具機(jī)動(dòng)性與快速性。研究不同推進(jìn)模式之間的耦合作用,將為兼具高速、高效、高機(jī)動(dòng)性的多游動(dòng)模式融合推進(jìn)技術(shù)提供理論基礎(chǔ)和技術(shù)支撐。
(4)驅(qū)動(dòng)及控制技術(shù)
現(xiàn)有的胸鰭波動(dòng)仿生機(jī)器魚多采用機(jī)電驅(qū)動(dòng)系統(tǒng),以伺服電機(jī)作為鰭條驅(qū)動(dòng)器,但傳動(dòng)機(jī)構(gòu)較復(fù)雜,效率低、噪聲大,而使用智能材料作為胸鰭驅(qū)動(dòng)器可以簡化系統(tǒng)結(jié)構(gòu),提升動(dòng)作柔性,是未來驅(qū)動(dòng)技術(shù)的發(fā)展方向。良好的運(yùn)動(dòng)控制是仿生機(jī)器魚進(jìn)行水下作業(yè)的前提和保障,面對復(fù)雜、動(dòng)態(tài)的水下環(huán)境,機(jī)器魚必須能夠及時(shí)改變波動(dòng)運(yùn)動(dòng)參數(shù),調(diào)整姿態(tài),躲避障礙物。通過采用先進(jìn)的仿生控制技術(shù)如CPG(Central pattern generator)生物神經(jīng)網(wǎng)絡(luò)控制技術(shù),實(shí)現(xiàn)胸鰭的節(jié)律運(yùn)動(dòng),同時(shí)結(jié)合外部反饋信息對機(jī)器魚的姿態(tài)和運(yùn)動(dòng)進(jìn)行控制,具有比傳統(tǒng)控制方法更好的柔性、實(shí)時(shí)性和適應(yīng)性。
(5)電源供給與通訊技術(shù)
電源供給和通訊是制約仿生機(jī)器魚作業(yè)時(shí)長和距離的關(guān)鍵因素。通過提升電池性能,降低機(jī)器魚能耗以提升續(xù)航時(shí)間,同時(shí)研究太陽能、潮汐能等新能源技術(shù)以尋求能源持續(xù)供給的可能。先進(jìn)的通訊技術(shù)如無線局域網(wǎng)技術(shù)的使用可以增加機(jī)器魚的活動(dòng)范圍,但要面向?qū)嶋H的應(yīng)用,需要開發(fā)出通訊范圍更廣、實(shí)時(shí)性更高的通訊技術(shù)。
4 結(jié) 語
胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚的游動(dòng)具有高效、高機(jī)動(dòng)性和穩(wěn)定性的特點(diǎn),逐漸成為仿生機(jī)器魚領(lǐng)域新的重要研究方向。目前,國內(nèi)外科研人員采用理論研究、實(shí)驗(yàn)觀測研究和數(shù)值模擬仿真的方法開展了胸鰭波動(dòng)推進(jìn)機(jī)理的研究,為胸鰭波動(dòng)仿生機(jī)器魚的設(shè)計(jì)提供了理論基礎(chǔ),國內(nèi)外也涌現(xiàn)了一批胸鰭波動(dòng)推進(jìn)仿生機(jī)器魚。隨著相關(guān)技術(shù)的不斷發(fā)展,這一推進(jìn)模式仿生機(jī)器魚的機(jī)體結(jié)構(gòu)將趨于合理,流體載荷分布將更加均衡,運(yùn)動(dòng)參數(shù)控制也更為靈活,在海洋及河流水質(zhì)監(jiān)測、船舶水下檢測與維修、水下軍事偵察等領(lǐng)域擁有廣闊的應(yīng)用前景。
[1] BANDYOPADHYAY P R.Trends in biorobotic autonomous undersea vehicles[J]. Journal of Oceanic Engineering,2005,30(1):109-139.
[2] 杭觀榮,曹國輝,王振龍,等.SMA 驅(qū)動(dòng)的仿生機(jī)器人研究現(xiàn)狀及其展望[J].微特電機(jī),2006,34(11):4-8.
[3] 王揚(yáng)威,王振龍,李健.微小型水下仿生機(jī)器人研究現(xiàn)狀及發(fā)展趨勢[J].微特電機(jī),2010,38(12):66-69.
[4] 王田苗,楊興幫,梁建宏.中央鰭/對鰭推進(jìn)模式的仿生自主水下機(jī)器人發(fā)展現(xiàn)狀綜述[J].機(jī)器人,2013,35(3):352-362.
[5] SFAKIOTAKIS M,LANE D M,DAVIES J B C. Review of Fish Swimming Modes for Aquatic Locomotion[J]. Journal of Oceamic Engineering,1999,24(2):237-252.
[6] SUZUKI K,KATO N,SUZUMORI K. Load characteristics of mechanical pectoral fin[J].Journal of Exp.Fluids,2007,44(5):759-771.
[7] 章永華.柔性仿生波動(dòng)鰭推進(jìn)理論與實(shí)驗(yàn)研究[D]. 合肥:中國科學(xué)技術(shù)大學(xué),2008.
[8] 謝海斌.基于多波動(dòng)鰭推進(jìn)的仿生水下機(jī)器人設(shè)計(jì)、建模與控制[D].長沙:國防科學(xué)技術(shù)大學(xué),2006.
[9] DANIEL T L.Forward flapping flight from flexible fins[J].Canadian Journal of Zoology,1988,66(3):630-638.
[10] LIGHTHILL J,BLAKE R. Biofluiddynamics of balistiform and gymnotiform locomotion.Part 1.Biological background,and analysis by elongated-body theory[J].Journal of Fluid Mechanics,1990,212:183-207.
[11] RAHMAN M M,MIKI H,SUGIMORI S,et al. Development of a real time simulator based on the analysis of 6-degrees of freedom motion of a biomimatic robot with two undulating side fins[J].Journal of Aero Aqua Biomechanisms,2013,3(1):71-78.
[12] 章永華,何建慧. 仿生藍(lán)點(diǎn)魟的結(jié)構(gòu)設(shè)計(jì)及建模[J]. 機(jī)械科學(xué)與技術(shù),2012,31(4):627-632.
[13] WEI Q P,WANG S,DONG X,et al.Design and kinetic analysis of a biomimetic underwater vehicle with two undulating long-fns[J].Acta Automatica Sinica,2013,39(8):1330-1338.
[14] ROSENBERGER L J,WESTNEAT M W. Functional morphology of undulatory pectoral fin locomotion in the stingray taeniura lymma(chondrichthyes:Dasyatidae)[J].The Journal of Experimental Biology,1999,202:3523-3539.
[15] BLEVINS E L,LAUDER G V. Rajiform locomotion:three-dimensional kinematics of the pectoral fin surface during swimming in the freshwater stingray Potamotrygon orbignyi[J].The Journal of Experimental Biology,2012,215(18):3231-3241.
[16] BLEVINS E L,LAUDER G V. Swimming near the substrate:a simple robotic model of stingray locomotion[J].Bioinspiration &Biomimetics,2013,8(1):016005.
[17] SIMONS D G,BERGERS M M C,HENRION S,et al. A highly versatile autonomous underwater vehicle with biomechanical propulsion[C]//Proceedings of Oceans 2009 IEEE Bremen:Balancing Technology with Future Needs,Piscataway,NJ,USA.2009:1-6.
[18] 章永華,何建慧,賈來兵.仿生藍(lán)點(diǎn)魟胸鰭在兩種波動(dòng)模式下推進(jìn)力的比較[J].機(jī)械工程學(xué)報(bào),2012,48(18):166-176.
[19] 王福軍.計(jì)算流體動(dòng)力學(xué)分析-CFD 軟件原理與應(yīng)用[M].北京:清華大學(xué)出版社,2004.
[20] RAHMAN M M,TODA Y,MIKI H. Computational study on a squid-like underwater robot with two undulating side fins[J].Journal of Bionic Engineering,2011,8(1):25-32.
[21] ZHANG Y H,JIA L B,ZHANG S W,et al. Computational research on modular undulating fin for biorobotic underwater propulsor[J].Journal of Bionic Engineering,2007,4(1):25-32.
[22] CHEN W S,WU Z J,LIU J K,et al.Numerical simulation of batoid locomotion[J].Journal of Hydrodynamics,2011,23(5):594-600.
[23] BIOLEAU R,F(xiàn)AN L,MOORE T.Mechanization of rajiform swimming motion:the making of Robo-ray[R].Engineering Physics Project Laboratory,Applied Science 479 Final Report,Project Number 0159,University of British Columbia,2002.
[24] RAHMAN M M,SUGIMORI S,MIKI H,et al. Braking performance of a biomimetic squid-like underwater robot[J].Journal of Bionic Engineering,2013,10(3):265-273.
[25] LOW K H,WILLY A.Development and initial investigation of ntu robotic fish with modular flexible fins[C]//Proceedings of the IEEE International Conference on Mechatronics & Automation.IEEE,2005:958-963.
[26] TAKAGI K,YAMAMURA M,LUO Z W,et al.Development of a rajiform swimming robot using ionic polymer artificial muscles[C]//Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE,2006:1861-1866.
[27] ALVARADO P V,CHIN S,LARSON W,et al.A soft body under-actuated approach to multi degree of freedom biomimetic robots:A stingray example[C]//Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Tokyo,Japan:The University of Tokyo,2010:473-478.
[28] SHANG L J,WANG S,TAN M,et al.Motion control for an underwater robotic fish with two undulating long-fins[C]//Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference.2009:6478-6483.
[29] 杭觀榮,王振龍,王揚(yáng)威,等. 肌肉性靜水骨骼原理的仿烏賊鰭推進(jìn)器[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2009,41(11):59-64.
[30] 王揚(yáng)威.仿生墨魚機(jī)器人及其關(guān)鍵技術(shù)研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué),2011.
[31] 高飛,王玉魁,王振龍,等. 形狀記憶合金絲驅(qū)動(dòng)的仿生墨魚水下機(jī)器人的原型設(shè)計(jì)[J].機(jī)器人,2013,35(3):346-351.
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
國際商務(wù)財(cái)會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
