機載平臺下功率級驅動及PWM 死區控制的研究
2014-03-12 09:24:12周俊鵬
微特電機 2014年10期
周俊鵬,李 焱
(長春工業大學,長春130012)
0 引 言
PWM 即脈寬調制技術,是指采用電子開關將輸入調制器的電壓進行寬度調制。為防止同一橋壁上兩只功率管同時導通,死區的設置就顯得格外重要。DSP+CPLD 在級聯H 橋配電網靜止同步補償器的應用,但并沒有具體的死區設置方法[1]。無刷直流電機的三環控制應用廣泛,從整體對三環控制綜合描述,卻沒有給出具體的功率級和死區的控制策略[2]。根據雙DSP 的雙PWM 變頻器在控制上相對獨立而又緊密聯系的特點,提出了一種基于雙定點DSP 的雙PWM 變頻器控制平臺設計方法。該平臺可以滿足雙PWM 變頻器不同控制算法對控制板的硬件需求,同時兼顧其通用性,然而沒有提到死區方面的性能[3]。在雙PWM 變頻器系統研究與設計分析中,只有在電網方面籠統的說明,沒有在電機控制方面的介紹[4]。運動控制器使用DSP + CPLD 結構,實現了直線插補的兩級插補。粗插補采用時間分割法,由DSP 軟件完成;精插補采用DDA 法,由CPLD 硬件完成,提高了插補精度和輸出脈沖頻率,改進了傳統的分割算法,保證分段坐標增量的均勻性,可是單從理論出發,沒有應用在工程中[5]。DSP和CPLD 的伺服控制器,應用于某光電系統的控制部分,雖然有工程應用價值,但沒有提到在產生PWM 波性能方面的說明[6]。DSP +CPLD 開關磁阻電機控制系統應用在電動汽車方面,沒有談到死區方面的問題[7]。用一系列等幅不等寬的脈沖來代替一個正弦波為思想,單從軟件與仿真方面達到理想PWM 波,可是具體實際應用方面未知[8]。基于雙閉環控制的單相PWM 整流電路中,雖然提到了死區發生電路,但詳細的精度與準確度方面卻未得到體現[9]。基于MCS -51 單片機的一種帶死區的PWM 脈沖調制方法,展現了PWM 波產生方法,但死區固定,并不具有代表性[10]。Proteus 中的直流電機PWM 調速系統中,也僅僅是單純的仿真,死區沒有體現,沒有工程應用背景[11]。PWM 波中調整占空比就可以得到不同的平均電壓。本文將介紹DSP數字信號處理器產生的PWM 詳細過程,并針對DSP 的死區寄存器設置只有幾種固定頻率,而且不能方便得到準確的整微秒,用CPLD 設置死區加以改進可得到精確的整微秒。試驗表明精確程度僅有0.2 μs 的誤差。
1 PWM 波形產生原理

從圖1 中可見,(NTxPR+1)×fT=T(所需周期)。
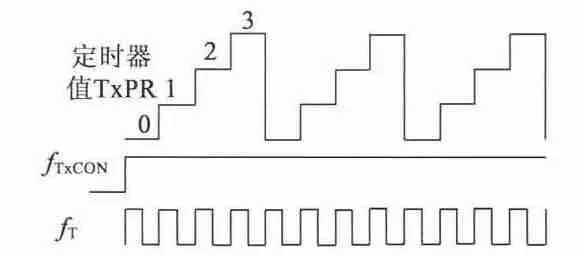
圖1 通用定時器連續增計數模式
從圖2 中可知,占空比低有效時為NCMPRx,高有效時占空比為[(NTxPR+1)-NCMPRx]/(NTxPR+1)。如果需要死區控制,則相應的死區控制寄存器中對應為設置適當的值。例如EvaRegs. DBTCONA. all= 0x0A74(死區定時器1、2 使能;死區定時器32 分頻)。前述的fsys=75 MHz,則死區時間t =32 ×10/75 μs=4.3 μs。根據上升沿要延遲一個死區時間,則PWM 波形如圖3 所示。
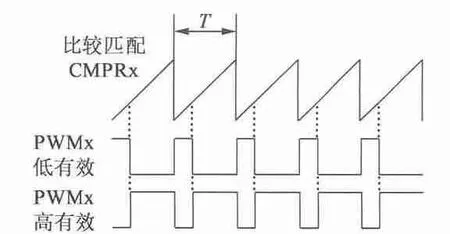
圖2 連續增計數模式下的通用定時器比較輸出
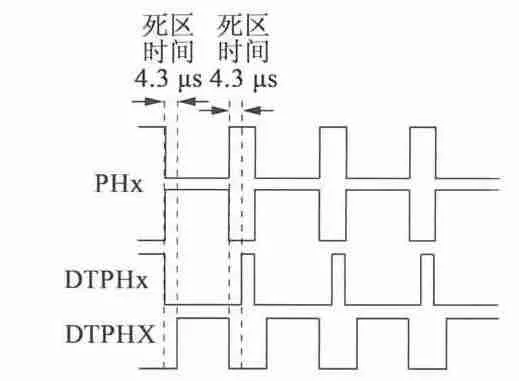
圖3 帶死區的PWM 波形圖
由以上死區設置可知,DSP 設置的死區通過繁瑣的計算不能方便得到整微秒。采用CPLD 設置可得到整微秒。
2 CPLD 產生帶死區的PWM 波原
由DSP 產生800 Hz(PWM1)占空比1∶ 4 的周期信號和PWM3 方向信號,送入CPLD 中,得到PWME1(C),PWME2(D),PWME3 (A),PWME4(B)四路信號,供給功率級來控制電機。表1 和表2為理論分析四路PWM 信號波形。
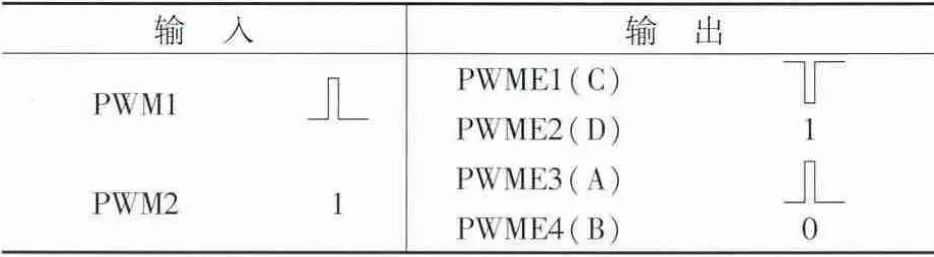
表1 理論分析正向PWM 信號波形
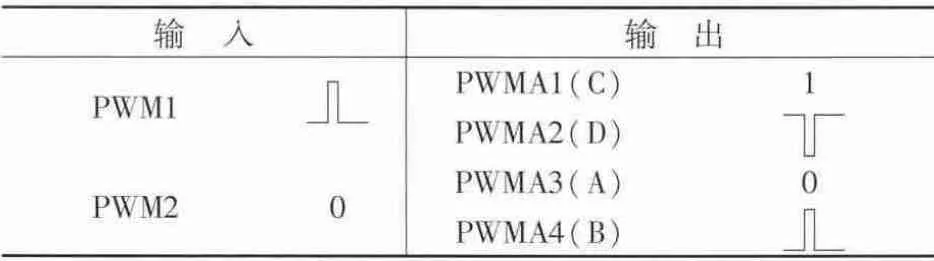
表2 理論分析反向PWM 信號波形
圖4 中在Quartus II 中設置pin_name 為16 MHz,經過16 分頻器后得到周期為1 μs 的基準波,經過6 個D 觸發器就可到得6 μs 死區,所以只需增加或減少D 觸發器,就可靈活方便地得到PWM 的死區。IOINPUT06,IOINPUT07 置1,PWM1 設置為800 Hz,PWM3 置1,可得A,B,C,D 四路仿真波形圖,如圖5 所示。
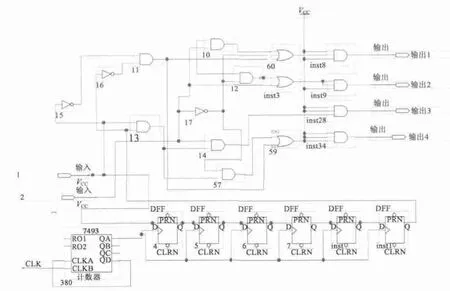
圖4 6 μs 死區設置PWM 邏輯電路
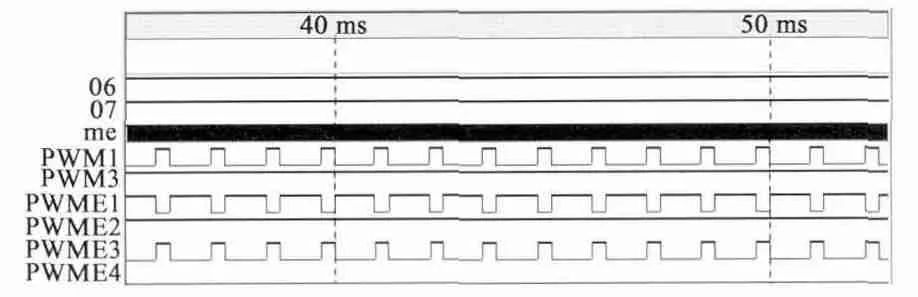
圖5 四路PWM 仿真波形圖
從圖5 中可見,PWME1 與PWME3 前沿相差6 μs 的死區,PWME2 為高電平,PWME4 為低電平。在Quartus II 中按上述方法設置PWM3 置0,其余設置不變,可得到圖6 仿真波形圖。

圖6 四路PWM 仿真波形圖
從圖6 中可見,PWME2 與PWME4 前沿相差6 μs 的死區,PWME1 為高電平,PWME4 為低電平。上述仿真結果與表1 和表2 所列理論分析完全一致。
3 功率級驅動電路
將CPLD 產生的A,B,C,D 四路帶死區的PWM信號送入圖7 的DRV2A,DRV1A,DRV2B,DRV1B中,經過4505 隔離放大反相后送入PM75CSE060中,在PN 端加上40 V 直流電壓,在U(+),V(-)兩端用示波器得到波形如圖8、圖9 所示。IPM 的Fo在欠壓、短路、過流和溫度過高時輸出低電平可設計作為電路故障監測端。
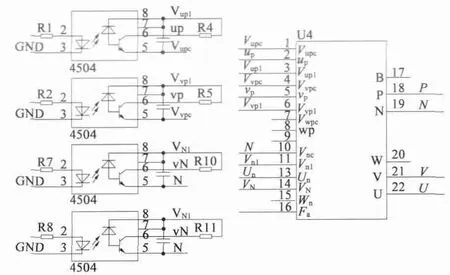
圖7 功率驅動電路
從圖8 和圖9 中可看到,PWM 波形前端稍帶尖峰,可提高電機帶載能力及其響應的快速性。
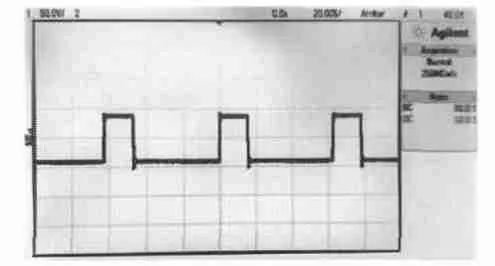
圖8 正向PWM 波形
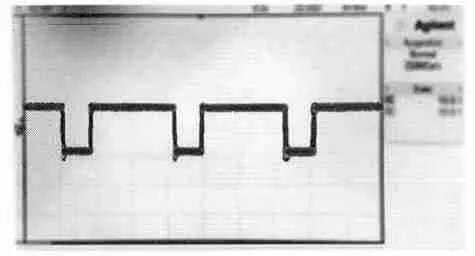
圖9 反向PWM 波形
從圖10 的示波器中可看出,從功率級端輸出PWM 波形死區為5.8 μs,非常準確,完全滿足快速反射鏡所需單極性PWM 波所需的死區要求。
圖11 為本工程實際的伺服控制電路板和功率級電路板。
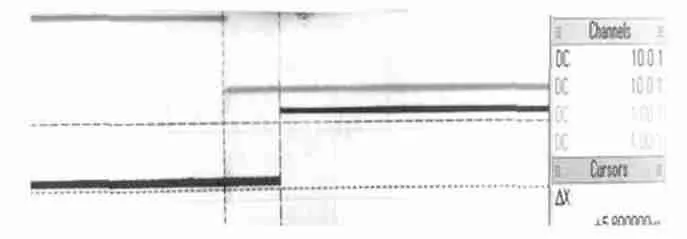
圖10 實測PWM 波形死區
圖11 伺服控制板加功率級驅動板
4 結 語
此快速反射鏡的功率驅動電路PWM 波死區要求大于5 μs,實測死區時間5.8 μs,完全滿足機載平臺下對PWM 波形的需要。死區時間不易設置過大,否則影響電機起動時間,使系統滯后,穩定裕度降低影響系統穩定性;同時稍帶尖峰的PWM 波形能夠提高電機驅動能力。此方法在實際應用中方便、可行、有效,能夠滿足某項目PWM 波形死區精度方面的需要。本文對功率驅動具有很好的通用性和借鑒性。
[1] 張艷梅,茍銳鋒,楊曉平,等.DSP+CPLD 在級聯H 橋配電網靜止同步補償器的應用[J].南方電網技術,2012,6(6):72-77.
[2] 張愛軍,程時兵,朱軍偉,等.DSP+CPLD 的無刷直流電機三環控制設計[J].電力電子技術,2012,46(11):106 -108.
[3] 尹璐,趙爭鳴,魯挺等.基于雙DSP 的雙PWM 變頻器控制平臺設計[J].電力自動化設備,2013,33(11):148 -153.
[4] 劉玉娥.雙PWM 變頻器系統研究與設計分析[J]. 電力電子,2013(20):206.
[5] 勞奇成,王義智,李武. 基于DSP 和CPLD 的運動控制卡插補器設計[J].機床與液壓,2014,42(4):92 -94.
[6] 秋亞.基于DSP 和CPLD 的伺服控制器設計[D].西安:西安工業大學,2013.
[7] 張超,全力,朱孝勇,等. 基于DSP +CPLD 的車用開關磁阻電機驅動控制系統的設計[J].電機與控制應用,2013,40(1):13-16.
[8] 妖鴻強,陳榮榮.基于FPGA 的正弦波PWM 信號發生器的設計[J].江南大學學報,2012,11(3):286 -289.
[9] 唐夢嫻,鄢立. 基于雙閉環控制的單相PWM 整流電路設計[J].儀表技術,2014,1(1):27 -30.
[10] 張超,胡順杰. 基于MCS -51 單片機的一種帶死區的PWM脈沖調制方法[J].電源世界,2014,26(4):26 -29.
[11] 袁戰軍.基于Proteus 的直流電機PWM 調速系統研究[J].電子設計工程,2013,21(5):113 -116.
[12] WANG G L,XU D G,YU Y.A novel strategy of dead-time compensation for PWM Voltage -Source Inverter[C]//23rd Annual IEEE Applied Power Electronics Conference and Exposition.2008:1779 -1783.
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
鴨綠江(2021年35期)2021-04-19 12:24:18
防爆電機(2020年3期)2020-11-06 09:07:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2017年7期)2017-06-05 09:36:13
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
