雙轉(zhuǎn)子永磁電動機有限元分析
2014-03-12 09:23:52王淑紅趙曉春
微特電機 2014年10期
關(guān)鍵詞:有限元
王淑紅,呂 航,武 瀟,趙曉春
(太原理工大學,太原030024)
0 引 言
雙轉(zhuǎn)子永磁直流電機由內(nèi)轉(zhuǎn)子(電樞轉(zhuǎn)子)和外轉(zhuǎn)子(永磁體轉(zhuǎn)子)組成。運行時,兩個轉(zhuǎn)子受到耦合場的電磁轉(zhuǎn)矩為等大小反方向的相互作用轉(zhuǎn)矩,使兩個轉(zhuǎn)子朝相反的方向旋轉(zhuǎn)[1]。因此電機的固定部分不承受電磁轉(zhuǎn)矩,可明顯提高機身的平穩(wěn)性,在船艦推進系統(tǒng)中有廣闊應(yīng)用前景[2],針對對轉(zhuǎn)結(jié)構(gòu)永磁直流電動機的性能進行研究尤為重要。
文獻[3]使用有限元法對傳統(tǒng)單轉(zhuǎn)子永磁直流電機進行了建模分析,簡要討論了電機結(jié)構(gòu)上的各參數(shù)對性能的影響。文獻[4]以抑制轉(zhuǎn)矩波動為目標對傳統(tǒng)永磁直流電機進行了優(yōu)化設(shè)計,使用有限元法對優(yōu)化結(jié)果進行了檢驗。目前對于雙轉(zhuǎn)子永磁直流電動機的有限元研究文獻較少。本文分別就靜態(tài)特性與動態(tài)特性對雙轉(zhuǎn)子永磁直流電動機進行了有限元分析;并采用重疊換相方法,改變控制主電路中開關(guān)管提前導通角,找到了使電磁轉(zhuǎn)矩波動范圍減小的最佳提前導通角。減小了穩(wěn)定運行過程中的電磁轉(zhuǎn)矩脈動率。
1 靜態(tài)有限元模型的建立
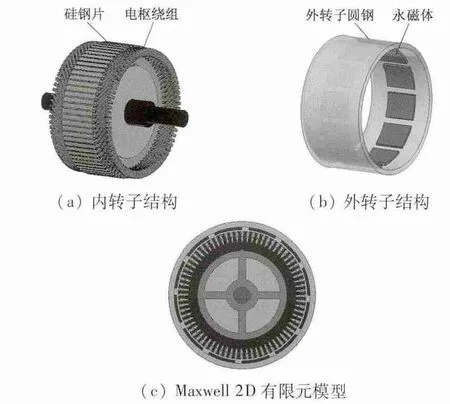
圖1 雙轉(zhuǎn)式永磁電動機結(jié)構(gòu)
2 靜態(tài)性能分析
對有限元模型計算之后能夠得到靜態(tài)特性,包括靜磁場分布情況和一對極范圍內(nèi)特定激勵方式下電機靜轉(zhuǎn)矩特性Te=f(i,θ1,θ2),與電感特性L =f(i,θ1,θ2)。
2.1 磁場分布
圖2 為兩個不同相對位置處靜態(tài)磁密分布圖。B 相繞組中通以30 A 的正向電流,C 相繞組通相等大小的反向電流。圖2(a)為初始位置處磁密分布圖,可以看出12 個磁極分界線處的外轉(zhuǎn)子圓鋼磁密達到了高度飽和,為1.76 ~1.89 T 之間。每個磁極中心線附近的內(nèi)轉(zhuǎn)子齒磁密也較高,為1.63 ~1.76之間。圖2(b)為兩個轉(zhuǎn)子相對位置為15°時磁密分布圖,該時刻外轉(zhuǎn)子(永磁體轉(zhuǎn)子)順時針轉(zhuǎn)過約10°,內(nèi)轉(zhuǎn)子(電樞轉(zhuǎn)子)逆時針轉(zhuǎn)過約5°。由圖可得磁密分布不僅整體上跟隨永磁體轉(zhuǎn)子轉(zhuǎn)過了相應(yīng)的角度,每極周期內(nèi)的分布情況也存在一定的差別。
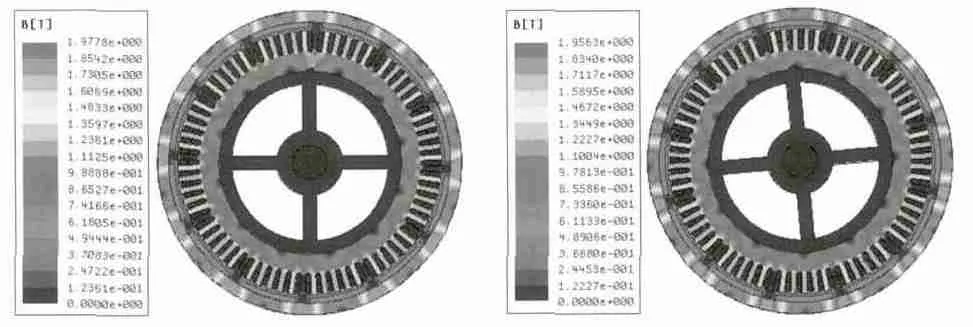
圖2 不同相對位置處磁通密度分布圖
2.2 靜轉(zhuǎn)矩特性曲線
取A 相正向繞組處于S 極的中心線處為初始位置,兩個轉(zhuǎn)子相對位置(θ1-θ2)的變化范圍為一對極。在繞組激勵不變的條件下,計算不同相對位置處數(shù)據(jù)可得到靜轉(zhuǎn)矩特性曲線。再依次改變激勵大小可得到如圖3 所示一簇靜轉(zhuǎn)矩特性曲線。
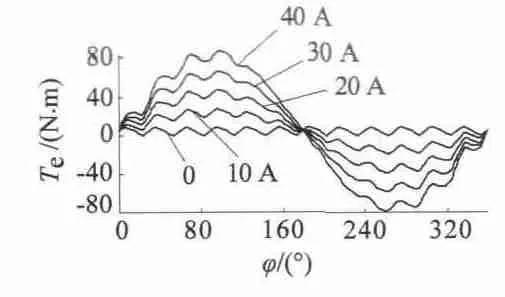
圖3 靜轉(zhuǎn)矩特性曲線
圖3 中,電流為0 時的特性曲線表示的是齒槽轉(zhuǎn)矩,波動周期個數(shù)與一對極下的齒數(shù)相符,齒槽轉(zhuǎn)矩是引起電機轉(zhuǎn)矩脈動的主要因素。由圖可得,各位置處靜轉(zhuǎn)矩值減去該位置處的齒槽轉(zhuǎn)矩值之后基本與電流大小成正比,與永磁體勵磁方式下靜轉(zhuǎn)矩變化規(guī)律一致。但是在少數(shù)位置處,當激磁電流超過30 A 之后,靜轉(zhuǎn)矩值稍低于對應(yīng)理論上的正比值。這是由于該位置處磁路已經(jīng)飽和,電樞反應(yīng)引起每極下主磁通平均值稍有下降,因此該位置處的靜轉(zhuǎn)矩稍低于理論正比值。
2.3 電感特性曲線
根據(jù)不同條件下的A 相自感值可得如圖4 所示的自感特性曲線簇。

圖4 自感系數(shù)變化曲線
由圖4 可知,繞組中電流為0 時,自感系數(shù)隨相對位置不同變化不大,繞組的自感系數(shù)近似為常數(shù),控制系統(tǒng)設(shè)計時電機參數(shù)可以認為是常數(shù)。而當激磁電流變化時,特別是電流較大、轉(zhuǎn)子相對位置變化時,某些相對位置處磁路飽和,繞組自感系數(shù)隨轉(zhuǎn)子位置不同,是近似階梯形的曲線,并且階梯的平頂部分都在相對位置90° ~270°的范圍內(nèi),自感值也很接近。其他位置范圍內(nèi)的自感值隨著電流值的增大而基本均勻減小,超過30 A 后隨電流值變化的幅度略微降低。
根據(jù)不同條件下的A 相與B 相互感值,可得如圖5 所示的互感特性曲線簇。
在數(shù)學模型研究及試驗驗證方面,波蘭科學院[22]建立了蓄熱換向流動反應(yīng)器(TFRR)的一維模型的2個不同版本(①帶反應(yīng)器壁蓄熱與②無反應(yīng)器壁蓄熱),并通過大尺寸反應(yīng)器上的試驗數(shù)據(jù)對模型進行了驗證。研究認為壁面蓄熱并不會直接影響反應(yīng)器內(nèi)填料溫度分布規(guī)律。
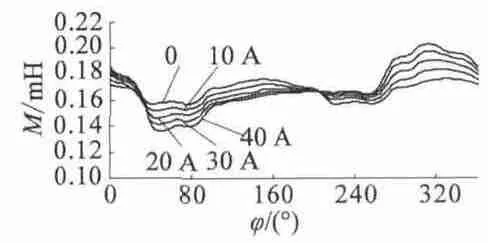
圖5 互感系數(shù)變化曲線
3 動態(tài)有限元模型的建立
動態(tài)有限元模型的電機結(jié)構(gòu)、繞組分相與靜態(tài)模型相同,可沿用靜態(tài)模型。此外,動態(tài)模型的激勵形式為外接控制電路激勵,并且需要將兩個轉(zhuǎn)子定義為獨立的運動區(qū)域同時進行運算。Maxwell 2D 模塊支持多個運動部分同時運算,本文在此模塊下進行電機的動態(tài)有限元建模。
3.1 動態(tài)模型激勵設(shè)置
動態(tài)模型的外接控制電路需要給繞組提供根據(jù)內(nèi)轉(zhuǎn)子和外轉(zhuǎn)子的相對位置參數(shù)而周期變化的方波激勵[1],這樣可保證電樞磁場與永磁體磁場等效同步,推動內(nèi)轉(zhuǎn)子和外轉(zhuǎn)子沿著各自的方向運動。圖6 為有限元計算模型中電機的主電路。通過控制主電路中的六個壓控開關(guān)管,使繞組根據(jù)相對位置參數(shù)而按既定規(guī)律通斷。主電路圖中與各相繞組相串聯(lián)支路上的電阻RA,RB,RC為相繞組電阻(三相繞組對稱,RA=RB=RC=R),電感LA,LB,LC為每相繞組的端部漏感(LA= LB= LC= Lδ),均可通過Ansoft 軟件RMxprt模塊下直流電機快速建模得到:R =0.17Ω,Lδ=6.931 8 ×10-5H。圖中,LWA是有限元模型A 相繞組。
圖6(b)為主電路中壓控開關(guān)管的控制電壓檢測電路。本文中設(shè)置檢測電壓高于0.5 V,即觸發(fā)該檢測表所對應(yīng)的開關(guān)管導通,低于0.5 V 即關(guān)斷。以A 相繞組的輸入端壓控開關(guān)管S1 為例,S1 所對應(yīng)檢測支路中脈沖信號VP1周期為60°,脈沖寬度為20°,電壓下限為0,上限為1 V,上升沿位置為5°,控制信號為θ1-θ2(θ1為內(nèi)轉(zhuǎn)子位置變量,θ2為外轉(zhuǎn)子位置變量)。相對機械位置的周期60°內(nèi),A 相正向?qū)ǚ秶鸀?° ~25°。分別設(shè)置各個開關(guān)管對應(yīng)的檢測支路中脈沖信號,使S2 ~S6 所對應(yīng)的脈沖信號依次比前一個延后10°。采用兩相同時通電方式,若A+C-表示A 相正向和C 相反向?qū)ǖ臓顟B(tài),則一周期內(nèi)繞組導通狀態(tài)依次為A +C -,B +C-,B+A-,C+A-,C+B-,A+B-。
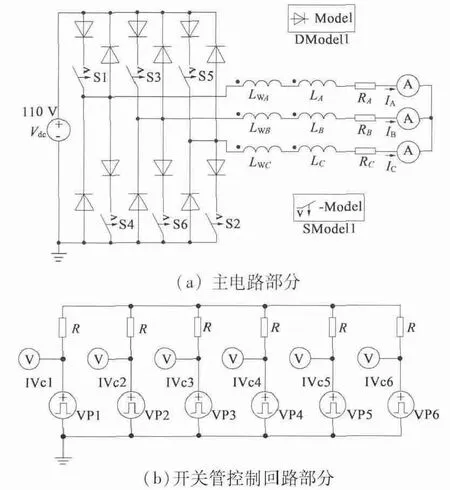
圖6 使用Maxwell 編輯的外電路
3.2 運動區(qū)域設(shè)置
相對于單轉(zhuǎn)子旋轉(zhuǎn)電機,雙轉(zhuǎn)子直流電動機的機械運動部分的設(shè)置較特殊,對雙轉(zhuǎn)子電機的動態(tài)性能有限元計算論文較少。對本文所研究的雙轉(zhuǎn)子直流電動機而言,兩個轉(zhuǎn)子的機械運動部分是各自獨立的,應(yīng)為兩個轉(zhuǎn)子分別設(shè)置運動求解區(qū)域(Band)。建立能恰好包含內(nèi)轉(zhuǎn)子的面域,設(shè)為Band1;建立恰好包含外轉(zhuǎn)子的面域,設(shè)為Band2,如圖7 所示(圖中陰影部分為各自的Band 區(qū)域)。

圖7 運動區(qū)域設(shè)置圖
運動區(qū)域內(nèi)物體的運動方式都設(shè)定為繞Z 軸的旋轉(zhuǎn)運動,并分別載入計算所得的轉(zhuǎn)動慣量,內(nèi)轉(zhuǎn)子轉(zhuǎn)動慣量為0.064 6 kg·m2,外轉(zhuǎn)子轉(zhuǎn)動慣量為0.034 1 kg·m2。
4 動態(tài)性能分析
雙轉(zhuǎn)子永磁直流電動機動態(tài)性能包括:起動過程及穩(wěn)定運行時繞組電流、內(nèi)轉(zhuǎn)子和外轉(zhuǎn)子各自的電磁轉(zhuǎn)矩、轉(zhuǎn)速隨時間變化曲線。
4.1 電流變化曲線
從電樞繞組的電流方程、電壓平衡方程來看,對轉(zhuǎn)式永磁直流電動機等效電路與傳統(tǒng)無刷永磁直流電動機一致,可借助傳統(tǒng)單轉(zhuǎn)子電機的電路平衡關(guān)系來分析該電機電樞電流。
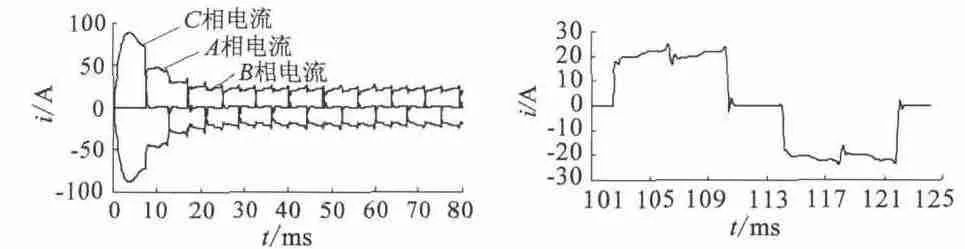
圖8 電流曲線
在三相六狀態(tài)工作方式下,每時刻均為兩相繞組導通,另一相為續(xù)流狀態(tài)或者完全關(guān)斷狀態(tài),如圖8(a)所示。若取一相繞組的一次續(xù)流過程和完全關(guān)斷過程為一個換相周期,則電機運行過程可完全由三相的換相周期輪流組成。以A+C-狀態(tài)轉(zhuǎn)換至B+C-狀態(tài)的換相周期為例,此換相周期可分為A 相續(xù)流過程t1和A 相完全關(guān)斷過程t2組成。根據(jù)續(xù)流過程等效電路可得續(xù)流過程中電流方程式如下[5]:
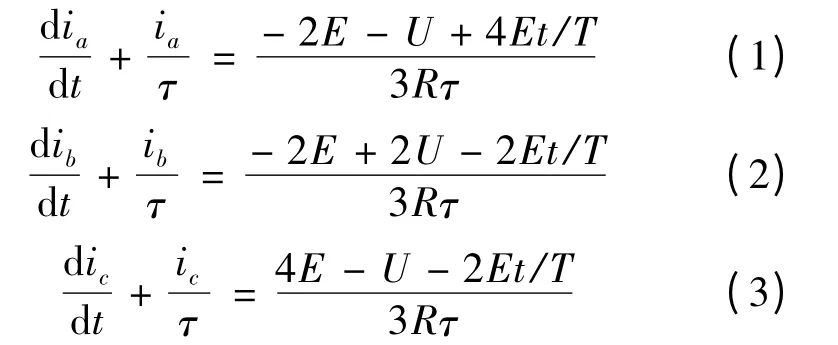
式中:τ 為相繞組電磁時間常數(shù);R 為相繞組電阻;I0為換相過程A 相初始電流;U 為輸入到逆變器的直流電源電壓;E 為相繞組等效反電勢幅值。有限元計算所得電機穩(wěn)定運行時相繞組反電勢波形如圖9所示,圖中曲線為相對轉(zhuǎn)速穩(wěn)定在430 r/min 時一個電周期內(nèi)相繞組反電勢波形。曲線在齒槽效應(yīng)影響下具有多次波動。為方便公式計算,將反電勢波形等效為規(guī)則120°梯形波。上式中,反電勢幅值E為等效梯形波幅值,不能取原波形的波動峰值。
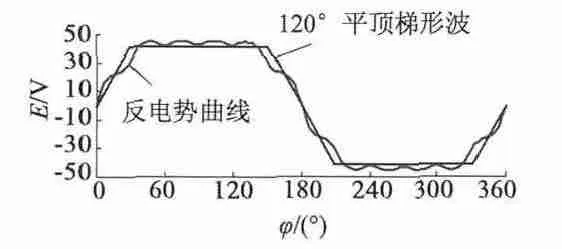
圖9 相繞組反電勢波形
根據(jù)式(1)至式(3),令初始條件:ia(0)=I0,ic(0)= -I0,ib(0)=0。求取微分方程,可得A 相繞組電流降為零,所需的時間t1與t1時刻結(jié)束時B 相和C 相電流值表達式:
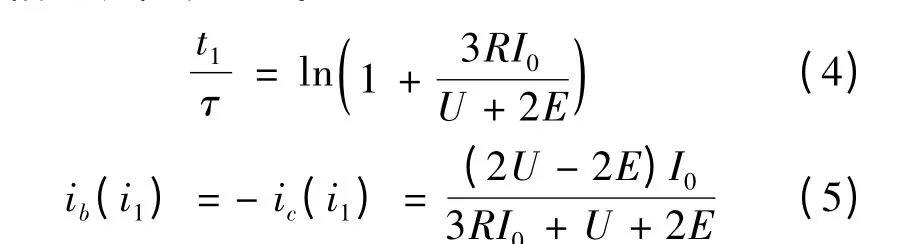
由式(4)、式(5)可得t1=0.25 ms,ib(i1)=16.9 A;與圖4 中的數(shù)據(jù)t1=0.2 ms,ib(i1)=17.2 A 基本吻合。其中t1的差別是由于時間段t1很短暫且與Maxwell 中的計算步長0.2 ms 相仿,因而等效為一個步長。由計算結(jié)果可知,由于電流變化率的不同,繞組由導通到電流下降至零的時間很短暫,而此時新導通相的電流尚未上升到平均導通電流[6],因此續(xù)流過程的三相電流值大小均會小于其他時間的電流值。
4.2 電磁轉(zhuǎn)矩曲線
轉(zhuǎn)矩脈動率有以下定義[7]:

式中:Tmax為電磁轉(zhuǎn)矩最大值;Tmin為電磁轉(zhuǎn)矩最小值;TN為電磁轉(zhuǎn)矩穩(wěn)定運行的平均值。
電機起動到穩(wěn)定運行過程中,兩個轉(zhuǎn)子所受的電磁轉(zhuǎn)矩曲線如圖10(a)所示。
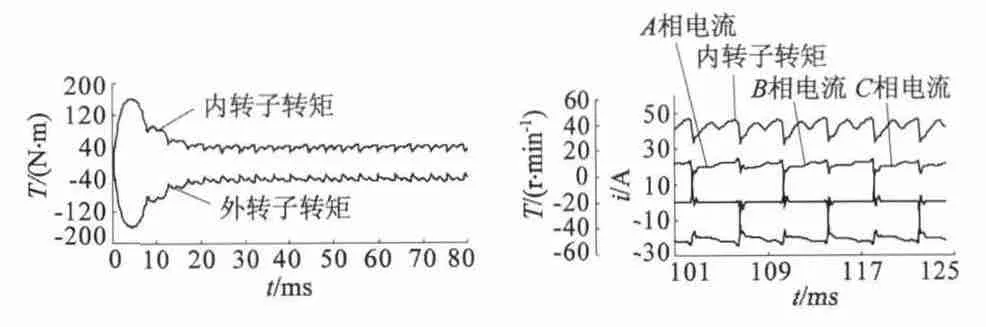
圖10 電磁轉(zhuǎn)矩曲線
由圖10 可知,內(nèi)轉(zhuǎn)子與外轉(zhuǎn)子所受電磁轉(zhuǎn)矩時刻大小相等方向相反。根據(jù)式(6)計算可得穩(wěn)定運行過程的轉(zhuǎn)矩脈動率Tr=43.1%,每電周期內(nèi)有12 次波動,對應(yīng)于一對極范圍下的12 組齒槽;其中有6次達到最小值并且均出現(xiàn)在關(guān)斷相的續(xù)流過程中。
穩(wěn)定運行過程中,一個電周期內(nèi)繞組電流與內(nèi)轉(zhuǎn)子所受電磁轉(zhuǎn)矩的曲線如圖10(b)所示。電磁轉(zhuǎn)矩的最小值均出現(xiàn)在續(xù)流過程中。根據(jù)電流曲線的分析結(jié)論可知,續(xù)流過程中續(xù)流相電流已降為零,新導通相電流還未增加至穩(wěn)定值,換相過程中電磁轉(zhuǎn)矩會減小[8]。并且正在換相的兩相繞組也正處于氣隙磁密較小的位置,因而電樞繞組所受的總電磁轉(zhuǎn)矩降至轉(zhuǎn)矩脈動的最低值。
4.3 轉(zhuǎn)速曲線
電機起動到穩(wěn)定過程中,兩個轉(zhuǎn)子的轉(zhuǎn)速曲線如圖11 所示。在30 ms 時刻到達穩(wěn)定轉(zhuǎn)速,內(nèi)轉(zhuǎn)子為150 r/min,外轉(zhuǎn)子為280 r/min。兩個轉(zhuǎn)子穩(wěn)定轉(zhuǎn)速的比值為0.536,轉(zhuǎn)動慣量比值為1.894,兩者之積為1.015≈1。因此兩個轉(zhuǎn)子負載轉(zhuǎn)矩相同的情況下,穩(wěn)定轉(zhuǎn)速的大小與各自的轉(zhuǎn)動慣量基本成反比。
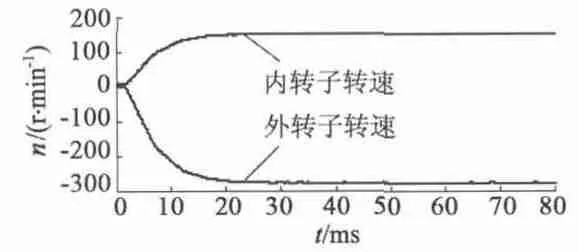
圖11 轉(zhuǎn)速曲線
5 轉(zhuǎn)矩脈動抑制
由圖10(b)的電磁轉(zhuǎn)矩分析結(jié)果可得,在繞組換相的續(xù)流過程中,所引起的轉(zhuǎn)矩波動較之齒槽轉(zhuǎn)矩波動影響更大。采取措施減小換相轉(zhuǎn)矩脈動將明顯提高轉(zhuǎn)矩整體平穩(wěn)性。而選擇適當?shù)奶崆皩ń嵌龋?],使續(xù)流繞組與將要導通的繞組重疊導通,可以補償續(xù)流過程中的電流值下降,減小凹下的電磁轉(zhuǎn)矩波動[10]。如果提前導通角度過大,則會引起新的轉(zhuǎn)矩波動[11],因此必須在合適的提前導通角下才能有效減小轉(zhuǎn)矩波動。文獻[12]提出了針對不同換相過程中提前導通角(時間)的計算方法。在4E>U 的條件下,電機運行在高速段,此過程中換相時間可表示:

式中:L 為繞組等效電感,等于相繞組自感與繞組間互感之差。由式(7)計算出換相區(qū)間時間并換算為角度,該值的一半為最佳提前換相角,為2.2°。在有限元軟件Maxwell 2D 環(huán)境下可通過改變開關(guān)管控制回路來模擬換相繞組提前導通。將控制回路中每個脈沖信號的上升沿根據(jù)相應(yīng)的提前導通角前移并維持下降沿不變,可改變各脈沖信號所對應(yīng)的MOS 管導通范圍,實現(xiàn)繞組提前導通。通過比較2.2°左右的不同提前導通角下有限元分析結(jié)果發(fā)現(xiàn),提前導通2°時電磁轉(zhuǎn)矩波動最小。在這種方案下壓控開關(guān)管S1 的導通區(qū)間為3°~25°,S2 ~S6 各自的導通區(qū)間依次比前一個延后10°。以A+C-狀態(tài)轉(zhuǎn)換至B+C-狀態(tài)的換相過程為例,將出現(xiàn)23°~25°的三相同時導通區(qū)間,這就形成了重疊換相。圖12 為有限元計算所得不采用提前導通與采用提前導通(提前導通角為2°)時兩個轉(zhuǎn)子的電磁轉(zhuǎn)矩曲線比較圖,由圖12 可得穩(wěn)定運行過程中電磁轉(zhuǎn)矩脈動率Tr=27.9%,與不采用重疊換相相比減小了15.2%。
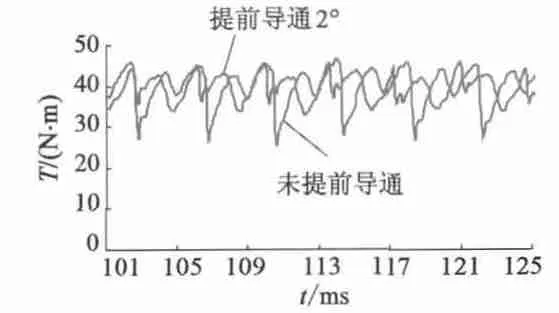
圖12 電磁轉(zhuǎn)矩曲線比較圖
6 結(jié) 語
本文建立了雙轉(zhuǎn)子永磁直流電動機的電磁場有限元模型,使用有限元分析軟件Maxwell 2D 模塊分別對電機靜態(tài)性能和動態(tài)性能進行了分析。通過靜態(tài)仿真繪制了磁場分布與靜態(tài)特性曲線,為優(yōu)化電機結(jié)構(gòu)參數(shù)與分析電機特性提供了理論依據(jù)。通過動態(tài)仿真實驗得到了各參數(shù)的運行規(guī)律,并得到了減小電磁轉(zhuǎn)矩波動的最佳提前導通角,為電機控制策略的優(yōu)化提供了基礎(chǔ)。
[1] 張世勤,邱建琪. 雙轉(zhuǎn)式永磁無刷直流電動機的建模與仿真[J].中國電機工程學報,2004,24(12):176 -181.
[2] 孫希通,王育才.雙轉(zhuǎn)式永磁無刷直流電動機系統(tǒng)建模與仿真[J].電機技術(shù),2009(3):1 -4.
[3] 王瑞,高尚.永磁無刷直流電機電磁場有限元分析[J].電子技術(shù),2011(5):69 -71.
[4] 連軍強,謝順依.基于有限元的永磁無刷直流電機轉(zhuǎn)矩優(yōu)化設(shè)計[J].電機與控制應(yīng)用,2011,38(12):7 -12.
[5] 譚建成.永磁無刷直流電機技術(shù)[M].北京:機械工業(yè)出版社,2011.
[6] 包向華,章躍進.無刷直流電動機換相轉(zhuǎn)矩脈動的分析和削弱方法[J].微特電機,2007,35(2):14 -17.
[7] 孫建忠,白鳳仙.特種電機及其控制[M].北京:中國水利水電出版社,2005.
[8] 李懷兵,丑武勝.換相期間無刷直流電機轉(zhuǎn)矩脈動的抑制策略[J].電機與控制應(yīng)用,2011,38(11):20 -24.
[9] 劉會飛,王淑紅.無刷直流電動機轉(zhuǎn)矩脈動的抑制[J].電力學報,2006,21(2):157 -159.
[10] YOSHIDAM M. Noise reduction by torque ripple suppression in brushless DC motor[C]//Proceedings Form PESC Record.1988:1397 -1401.
[11] 王淑紅,熊光煜.無刷直流電機換相轉(zhuǎn)矩脈動減小及動態(tài)仿真[J].電機與控制學報,2008,12(2):169 -173.
[12] 羅宏浩,吳峻.永磁無刷直流電機換相控制研究[J]. 中國電機工程學報,2008,28(24):108 -112.
猜你喜歡
艦船科學技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
