嚙合式電動機經濟型反饋控制系統研究
2014-03-12 09:24:46趙乾麟
微特電機 2014年10期
趙乾麟,柳 文
(浙江乾麟縫制設備有限公司,麗水323000)
0 引 言
嚙合式電動機是一種新型直驅電動機,其運行原理在文獻[1 -4]中都有論述。跟無刷電動機一樣,嚙合式電動機需要控制裝置才能運轉,近年來許多研究人員設計了不同的控制系統。文獻[5 -8]設計了基于DSP 芯片的控制器,文獻[9]設計了基于32 位ARM 芯片的控制系統,它們的共同特點是采用了32 位主控芯片和增量式光電編碼器,32 位主控芯片成本昂貴,不利于推廣應用;增量式光電編碼器作為轉子位置反饋,分辨率高,但成本高且難以判斷轉子的絕對位置。文獻[5 -9]也都沒給出具體的角度位置控制方法,文獻[10]設計了測量轉子絕對位置的傳感器,省去了光電編碼器,不足之處是光耦數多,4 相電機用了4 個光耦;文獻沒給出光耦信號之間的角度測量細分方法,因而不能實現變開關角控制,所用的FPGA 主控芯片價格也不低。文獻[11]設計了成本低廉的控制器,但它采用開環位置控制,沒有轉子位置反饋,效率低、速度低、噪聲大,因此,這類電機的控制系統值得進一步研究。
針對上述研究現狀,本文重新設計了6 相嚙合式電動機控制系統,并從以下幾點作了改進:設計了少光耦的位置傳感器,用3 個光耦實現了6 相電機的位置檢測;用軟件法實現了觸發信號之間的角度細分,省去了增量式光電編碼器;用8 位單片機代替了32 位芯片實現了固定開關角和變開關角的控制。總之,用低成本器件實現了良好的控制效果。
1 嚙合式電動機的基本特點
6 相嚙合式電動機的基本結構如圖1 所示。定子與轉子同時是一對相嚙合的齒輪減速器,定子為太陽輪,轉子為行星輪,轉子繞定子中心作公轉和自轉的復合運動。定子齒輪在適當位置斷開,形成磁極,繞上線圈,在控制器作用下各相依次通電吸引轉子邊嚙合邊旋轉。轉子的公轉和自轉可以由機構分離輸出[2],其公轉為減速前的高速運動,自轉為減速后的低速大力矩運動,因此這類電機可有兩種輸出動力,圖1 中的輸出軸為低速輸出端。與4 相電機相比,本文的6 相電機更平穩,負載能力更強。嚙合式電動機的控制跟無刷電動機類似,也需根據轉子位置投勵,這就需要解決轉子位置檢測問題。
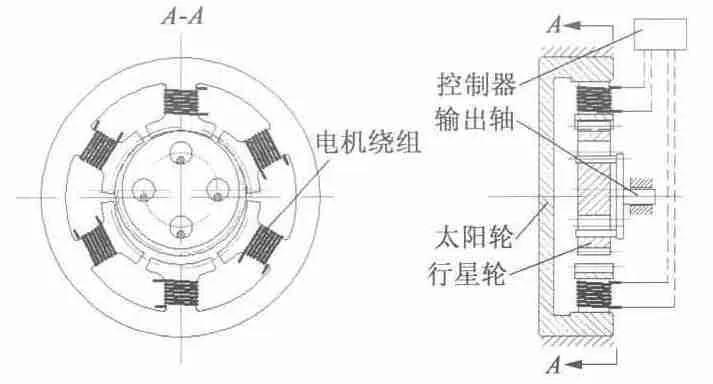
圖1 6 相嚙合式電動機的基本結構
2 轉子位置檢測方法
2.1 轉子位置傳感器的設計
轉子位置檢測可采用磁敏元件或光敏元件,本文采用開式光耦配合遮光板來實現。由于6 相電機的相數偏多,若每相用一個光耦,則成本高且接線復雜,這里用3 個光耦來檢測轉子相對于6 相繞組的位置,原理如圖2 所示。其中3 個光耦位置分別對準A、C、E 三相繞組中心線;遮光板開一個60°缺口,并以如圖2 所示的位置為零位。
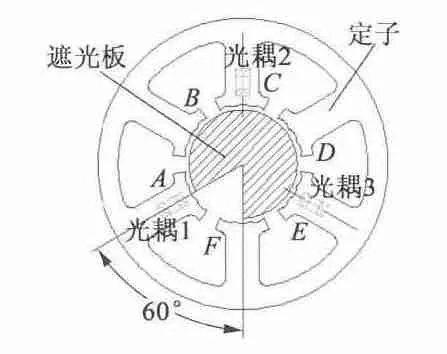
圖2 光耦與遮光板的安裝位置關系
將圖中的光耦和遮光板集成在一起,做成一個位置傳感器,通過適當的方式與電機本體連接。
2.2 光耦信號處理
光耦信號需要經過適當的處理才能使用,處理電路如圖3 所示。
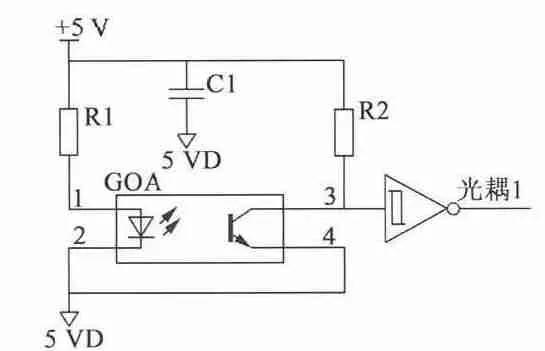
圖3 光耦信號處理電路
圖3 中,當光線被遮住時,3 腳輸出高電平;當光線通過時,3 腳輸出低電平。3 腳的信號經施密特觸發整形電路整理為邊沿很陡的方波,然后經過取反運算,改變為光線被遮住時輸出低電平、開口經過光耦時輸出高電平,由此可得三個光耦的輸出信號與轉子位置關系,如圖4 所示。
由圖4,轉子每轉過60°,會觸發一個信號跳變沿,一周內共產生6 個跳變沿,這就可用3 個光耦信號驅動6 相繞組,完成位置檢測功能。同時把三路信號經“或”運算,合成連續的方波,如圖4 中的“合成信號”,該信號可用于電機轉速測量和角度細分。

圖4 光耦輸出信號
2.3 位置傳感器與電機本體的連接
嚙合式電動機的轉子做公轉和自轉兩種運動,由電機的左右兩個半軸分離輸出。位置傳感器必須連接到公轉輸出端,并保證遮光板與轉子的位置關系。具體方法是:先把傳感器支架與電機本體連接,然后給F 相通電,把轉子吸到F 相中心線位置;順時針轉動傳感器軸,使得光耦1 的輸出信號剛好為上升沿觸發態,此時遮光板正位于零位,用聯軸器把傳感器與電機的公轉軸緊固在一起即可。安裝方式如圖5 所示。
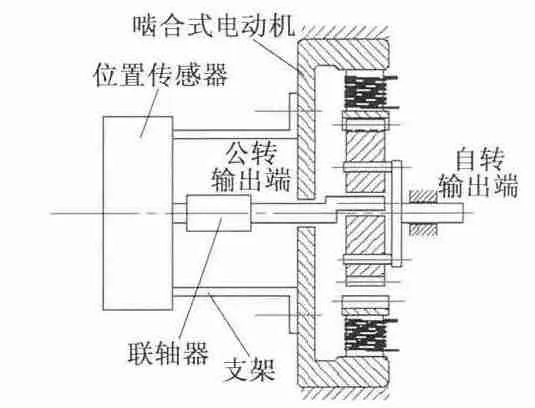
圖5 位置傳感器與電機本體的連接
3 控制系統的設計
3.1 控制系統的硬件結構
控制系統整體結構如圖6 所示。主控芯片采用ATMEGA64,它是一種8 位單片機,成本遠低于32位高端芯片。三路光耦信號連接到外部中斷引腳INT0 ~INT2,通過外部中斷實現快速換相。三路光耦經“或”運算的合成信號連接到定時器T1 的捕捉引腳IC1,用于轉速測量。電位器給出的電壓信號經過AD 轉換用于轉速設定,電機的電流和電壓檢測信號經過AD 轉換,用于過流和過壓保護。6 相繞組的開關信號由IO 端口PA1 ~PA6 輸出,PWM調速信號由定時器T3 的比較輸出引腳OC3A 輸出,它們經過合成用來驅動功率器件,控制電機運轉。

圖6 電機主控制器硬件結構
3.2 功率驅動電路
6 相功率驅動電路相互獨立,結構基本一致,以A 相為例,其驅動原理如圖7 所示。
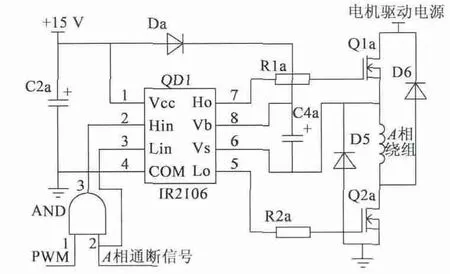
圖7 功率驅動電路
A 相開關信號PA1 與PWM 信號經與門合成后接到上橋驅動端,實現上橋開關和斬波;A 相開關信號直接接到下橋驅動端,控制下橋通斷。經過IR2106 完成電平轉換后,分別接到上下橋功率器件的柵極,最終控制繞組電流。
繞組驅動采用不對稱半橋電路。當上下橋同時導通,A 相勵磁;當PWM 斬波信號到來,上橋關斷下橋導通時,A 相處于非能量回饋續流狀態,把儲存的磁場能轉化為機械能,這可以提高功率因數;當上下橋同時關斷,A 相處于能量回饋續流狀態,通過二極管D5、D6 向電源回饋能量,使續流電流迅速衰減為零,以盡量減小負扭矩。改變PWM 波占空比,可實現電機調速。這種方式比上下橋同時進行PWM 斬波有更高的效率。
3.3 固定開關角換相邏輯的實現
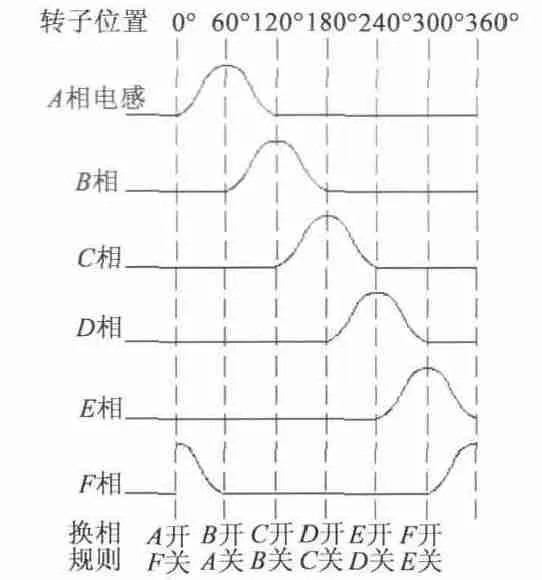
圖8 順時針公轉時固定開關角換相法則
電機6 相繞組的電感隨轉子位置變化而改變,各相電感與轉子位置角的變化關系如圖8 所示。在每相繞組的電感上升區通電會獲得正扭矩,在電感下降區則產生負扭矩,因此要在電感上升區通電,電感下降區斷電。照此原理,圖8 給出了轉子順時針公轉時的換相時刻及開關順序。圖中換相時刻正好對應著一個光耦信號的升降沿,此時單片機會觸發一次外部中斷,當中斷到來時判斷當前引腳的電平就可獲知轉子具體位置,決定換相邏輯。例如,若INT0 中斷觸發,則在子程序中判斷INT0 引腳電平,若為高電平,說明此時轉子位于0°位置,需開通A相關閉F 相;若為低電平,說明轉子位于60°位置,則開通B 相關閉A 相;以此類推。
以上是順時針公轉的方法,逆時針公轉時按相反順序換相即可。這就是固定開關角的換相邏輯。
3.4 轉速的測量與角度細分
三路光耦相“與”合成信號如圖4 所示。其中每個升降沿對應轉子轉過60°機械角,利用定時器T1 的捕捉功能,可測出相鄰兩升降沿的時間差ΔT1。將ΔT1的時間單位轉化為秒,注意到轉子公轉一周會觸發6 個升降沿,可得出電機轉速n:

這樣測出的轉速為公轉速度,除以減速比可以得到電機自轉輸出端的轉速。既然已測得轉子轉過60°機械角的時間ΔT1,若再用定時器測出任意時間間隔Δt,就可得Δt 內轉子轉過的機械角:

這樣就能用定時器測出任意時刻轉子的位置角,實現了相鄰兩升降沿之間的角度細分。
3.5 變開關角的換相方法
固定開關角換相方法用于電機起動階段是可以的,但在電機正常運轉之后對扭矩輸出有所不利。這是因為:1)該方法在電感上升階段才開通,此時電感逐漸增大,相電流增長會越來越困難,特別在高速運轉時電流嚴重受限,輸出扭矩會減小很多;2)在電感最高位置處才關斷,繞組續流時轉子已進入電感下降區,會產生阻力扭矩,降低電機效率。所以應把繞組開關角適當提前,并合理調節,可顯著高電機的轉速和效率。這就是變開關角控制。
上節已解決了角度細分測量問題,這使變開關角控制成為可能。具體方法是在外部中斷到來時啟動兩個定時器,分別測量開通角和關斷角,當所測角度達到預期位置時就對某相開通或關斷。圖9 舉例說明了具體的變開關角控制方法。
如圖9 所示,當在0°角外部中斷觸發時,立即啟動T0 和T2 進行角度測量。合理設置定時器的初值和預分頻,可使得當測量角到達換相位置時,T0和T2 正好觸發溢出中斷,此時可在T0 中斷子程序中開通B 相,在T2 中斷子程序中關斷A 相。若在60°角觸發外部中斷,則在T0 和T2 溢出中斷時開通C 相和關斷B 相,以此類推。所有相的開通都在T0中斷時完成,所有相的關斷都在T2 中斷中完成,這樣就用2 個定時器實現了變開關角控制。
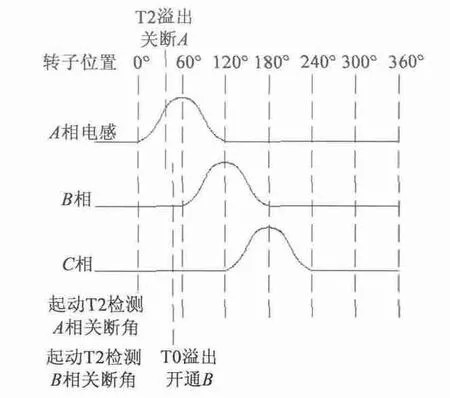
圖9 變開關角換相方法
4 試驗測試
本文自行搭建了嚙合式電動機測試裝置。它主要由嚙合式電動機、扭矩傳感器、磁粉制動器等部件構成,其結構原理如圖10 所示。磁粉制動器可調節輸出扭矩,扭矩傳感器的測量值經過采集卡上傳到PC 機;電機的轉速、電流、電壓信號由本文設計的電機控制器測量,通過串口上傳PC 機,經過數據匯總畫出曲線。

圖10 電機測試裝置結構
電源電壓采用直流36 V,保持自轉輸出端的輸出扭矩4 N·m 不變,通過增加占空比和改變開關角,不斷提高電機轉速,測得電機公轉轉速可達8 000 r/min 以上,此時開關角:比固定開關角提前8.5°開通,提前5°關斷。通過數據匯總,畫出恒扭矩條件下公轉轉速與電機效率曲線如圖11 所示。可見,變開關角控制方法使電機效率明顯提高,恒扭矩運行最高效率達82%以上,平均效率也在70%左右。而普通控制器在相同條件下公轉轉速還不到4 000 r/min,最高效率也小于60%,本文控制系統顯著提高了控制品質。
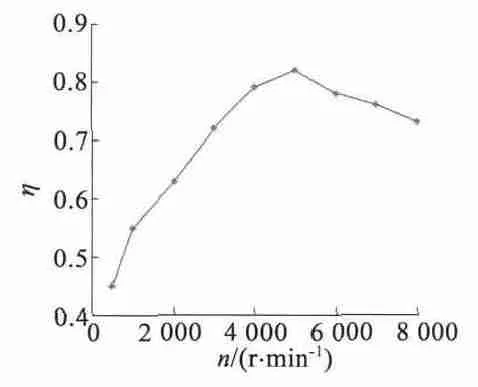
圖11 恒扭矩條件下所測系統效率曲線
圖11 中的轉速為公轉轉速,該嚙合式電動機的減速比為1∶ 28,除以減速比可得到自轉輸出端的轉速。
5 結 語
本文設計了6 相嚙合式電動機經濟型位置反饋控制系統,用8 位單片機取代了昂貴的32 位主控芯片;用3 個光耦實現了6 相電機的位置檢測;用軟件方法實現了角度細分測量,省去了增量式光電編碼器。該系統最終實現了6 相電機的固定開關角和變開關角控制。試驗表明該系統顯著提高了嚙合式電動機的運行品質,恒扭矩條件下電機的最大公轉轉速提高到8 000 r/min 以上,平均效率提高到70%以上。
[1] 張秋豪.嚙合式電動機[D].北京:北京郵電大學,2001.
[2] 呂新明,孫漢旭.嚙合式電機及其動力輸出機構的設計[J].機電產品開發與創新,2006,19(4):1 -3.
[3] XU Qiang,LIAO Qizheng,WEI Shimin,et al. Construction principle and torque solution of the translational meshing motor[C]//Proc. of IEEE International Conference on Mechatronics and Automation 2007:2894 -2899.
[4] 徐強,廖啟征,魏世民,等.新型平動式嚙合電機的運行原理和靜態轉矩[J].電機與控制學報,2008,12(1):10 -14.
[5] 申友志.基于TMS320F2812 的平動電機控制系統設計[D].北京:北京郵電大學,2008.
[6] 呂新明,孫漢旭,賈慶軒.新型嚙合式電動機全數字化控制系統設計[J].北京化工大學學報.2007,34(3):321 -325.
[7] 張密,賈慶軒,孫漢旭. 嚙合式電動機調速系統設計[J]. 儀表技術,2009(1):46 -50.
[8] 于忠華,孫漢旭,呂新明. 基于LF2407A 的嚙合式微型電機控制驅動器[J].機電產品開發與創新,2006,19(4):144 -146.
[9] 吳坤. 基于S3C2440 的平動式嚙合電機驅動控制系統設計[D].北京:北京郵電大學,2010.
[10] 李瑞華.平動式嚙合電動機的位置反饋控制系統[J].微特電機,2013,41(6):64 -67.
[11] 趙乾麟,柳文.嚙合式電機經濟型控制系統的設計[J]. 機電產品開發與創新,2012,25(5):144 -146.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
