基于FCM8531 控制的無刷直流電動機分析與試驗
2014-01-13 10:06:26黃松柏田燕飛
微特電機 2014年10期
黃松柏,田燕飛
(1.湖北理工學院,黃石435003;2.廣東工業大學,廣州510006)
0 引 言
無刷直流電動機既具有交流電機結構簡單、運行可靠等優點,又具有直流電機效率高和調速性能好的優點,是現在發展最快的一類電機,在各種家用電器、航空領域以及傳動控制領域等工業領域得到了廣泛的應用[1-2]。但是無刷直流電動機在運行過程中會產生振動和噪聲,限制了無刷直流電動機的推廣和應用。目前國內外針對無刷直流電動機振動和噪聲的研究并不多。
以前無刷直流電動機控制主要采用方波驅動方案,該驅動方案在換相時會出現電流突變,轉矩波動較大,會使電機產生較大的噪聲。現在電機控制技術的越發成熟,主要采用正弦波驅動控制無刷直流電動機的方式。采用正弦波驅動控制方式時,電機運行時電流波形為正弦波,可以有效抑制轉矩波動,降低電機噪聲[3-4]。
本文設計了一種基于FCM8531 雙核控制器和FSBS10CH60 驅動器的正弦波驅動控制系統,噪聲小、效率高,能有效實現正弦波控制三相無刷直流電動機。并利用ANSYS/Maxwell 分析軟件建立了電機的二維有限元模型,結合電機磁極偏移技術,降低電機齒槽轉矩,試制了樣機。樣機實驗表明:采用FCM8531 雙核控制器與磁極偏移技術結合的方法可有效抑制電機運行中的轉矩波動,對電機控制及設計有一定的應用價值。
1 正弦波驅動的無刷直流電動機
本文針對電機的振動和噪聲問題,設計了一款額定電壓300 V、額定轉速1 450 r/min、輸出功率150 W 的無刷直流電動機。其中電機控制部分是以FCM8531 雙核控制器和FSBS10CH60 驅動器構建正弦波控制核心;本體通過ANSYS/Maxwell 有限元分析軟件,計算出電機轉子磁極最佳偏移角度,降低電機運行過程中齒槽轉矩的幅值,達到降低電機運行系統振動和噪聲的目的。電機控制系統總體設計框圖如圖1 所示。
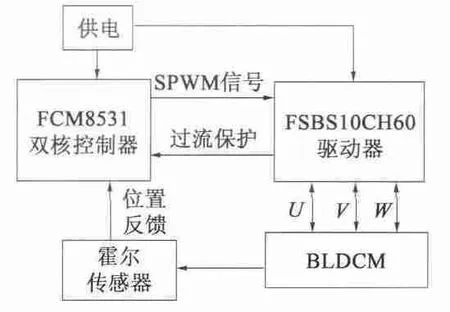
圖1 系統總體設計圖
2 控制系統主要電路設計
2.1 供電部分設計
通過分析可知,該控制系統需要不同的電壓,電機母線需要300 V 直流電壓,FSBS10CH60 驅動器需要15 V 直流電壓,所以系統電源設計了300 V 和15 V 直流電壓。
通過220 V 電網交流電壓整流濾波后得到300 V 直流電壓,如圖2 所示。為了得到優質的工作電壓,在整流橋中加入了濾波去噪的設計,并且在220 V 交流輸入端串聯一個阻值為10 Ω 的負溫度系數熱敏電阻和并聯一個470 V 的壓敏電阻,以抑制高頻工作的開關電源產生的浪涌電流和電壓[5]。為了降低高頻共模噪聲,還分別在輸入零線和火線上串一個電感。
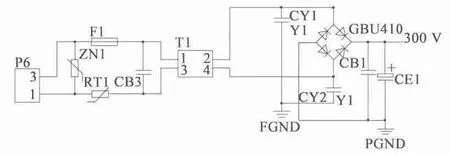
圖2 300 V 直流電源電路
IPM 驅動用的15 V 直流電壓可由小功率開關電源集成芯片AP8012 獲得。AP8012 是一款寬電壓輸入、輸出的電源芯片,其輸入電壓范圍為85 ~265 V,輸出電壓范圍是9 ~36 V。經過實驗和研究,在本系統中可用電機母線300 V 電壓串聯一個47 Ω、1/2 W 的電阻對其供電[6]。其具體實現電路如圖3 所示。
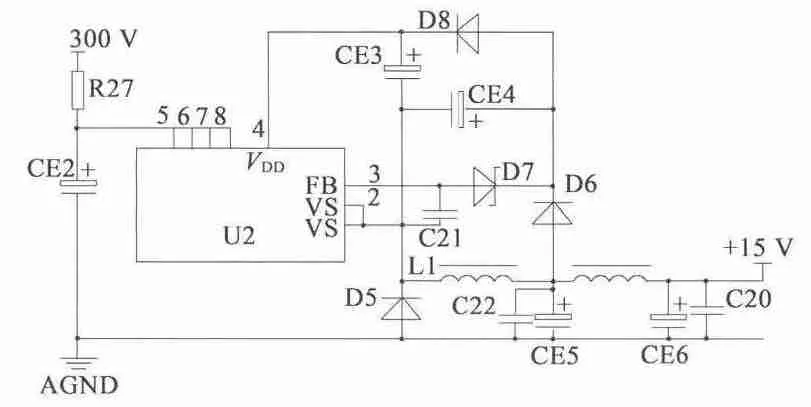
圖3 15 V 直流電源電路
2.2 正弦波控制和驅動部分設計
正弦波控制電路采用飛兆開發的具有并行處理核心的FCM8531 雙核型電動機控制器,FCM8531 的兩個并行處理器分別是電動機控制器(AMC)和嵌入式微控制器(MCU),其中AMC 是一個基于硬件的電動機控制器,外加一個可以配置為數種專用電機控制算法的可配置處理內核,可以直接對各種電動機控制;嵌入式MCU 與MSC51 具有兼容功能,可以向AMC 提供電動機的控制指令,執行電動機控制,還管理外部的通信接口,如GPIO,UART,SPI等。這兩個處理器雖然集成在一個單芯片中,但是又獨立工作,通過具有特別功能的寄存器(MSFR)搭建二者之間的對話平臺,實現二者之間相互通信,并且可以通過有助于避免系統掛機并增強硬件保護的內部通信接口協作進行數據交換。FCM8531 通過其集成式硬件控制器和MCU 接口管理功能,大大地減少了軟件負擔,提高了電動機負載響應速度,增強了電機的抗干擾能力,實現了電動機高效可靠的控制。其中雙核心混合構架如圖4 所示。
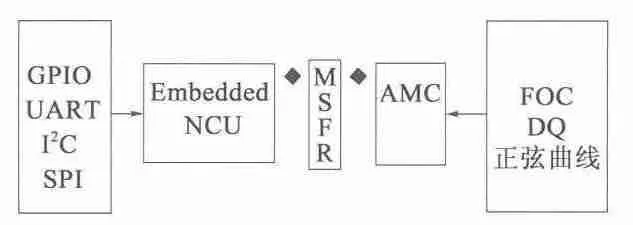
圖4 FCM8531 的雙核心模擬和數字混合架構
FCM8531 混合了模擬和數字的架構方式,相較于單純采用DSP 的數字控制方式,具有特有的優勢:其一能減少軟件工作量,因為客戶可以直接使用飛兆半導體存儲在AMC 中的軟件庫,其就可以執行FOC 和DQ 控制等復雜算法;其二,兩個處理器相互獨立,避免了系統中斷產生相互影響;其三,AMC 是硬件內核,能硬件實時逐周期電流保護檢測PWM信號,能在微秒內關斷PWM 信號,防止系統被損壞。
該器件也適合解決風扇啟動抖動和泵具有噪聲和低效率問題,并且該芯片還具有多種硬件的保護功能,如過壓保護和過流保護。該芯片能夠為所有故障模式提供快速的響應,同時嵌入式MCU 還可實現各種額外功能。電機控制電路設計如圖5 所示。
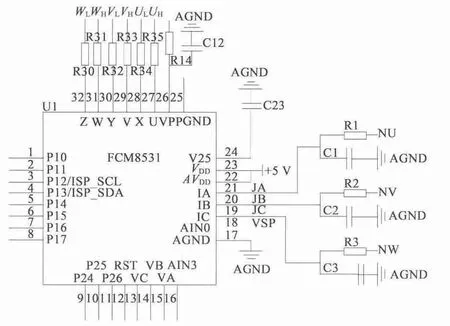
圖5 正弦波控制電路設計圖
正弦波驅動電路采用飛兆先進的智能功半模塊FSBS10CH60,它是一款結構賢湊、性能高效的無刷直流電動機驅動器。該模塊組合了優化的保護電路和與低損耗的IGBT 相匹配的驅動IC。通過集成欠壓閉鎖和短路保護功能,提升了系統可靠性。內置的高速高壓集成電路(HVIC)提供了無需光耦(光電耦合器)的單電源IGBT 門極驅動能力,縮小逆變器系統的整體尺寸。由于采用了分立的負端子,從而還可獨立檢測逆變器的每一相電流。該系統體積小,運行可靠,智能化高。電機驅動電路的設計如圖6 所示。
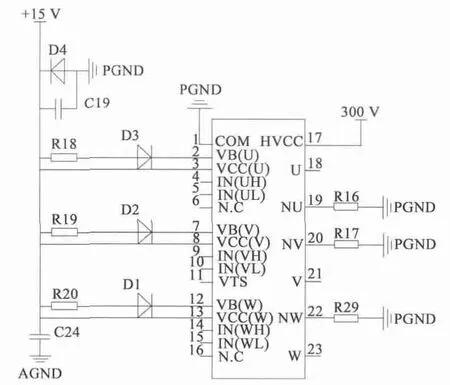
圖6 正弦波驅動電路設計圖
3 無刷直流電動機設計
在無刷直流電動機中,永磁體和有槽電樞鐵心相互作用,會產生齒槽轉矩,導致電動機轉矩波動,引起振動和噪聲。然而采用永磁體偏移一定的小角度,可消弱電動機的齒槽轉矩幅值,抑制轉矩波動,有減小振動降低噪聲的效果[7]。
3.1 齒槽轉矩抑制的理論分析
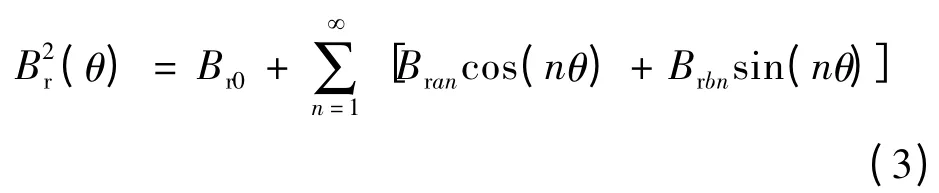
磁極偏移一定的小角度會降低齒槽轉矩的幅值。假設在真空狀態,電樞鐵心中磁導率為無窮大時,可以假定認為電動機內儲存的能量為電動機氣隙內的能量和,即:

式中:μ0為真空中的磁導率;(θ)為永磁體的剩磁密度;g(θ,α)為有效的氣隙長度分布;hm為永磁體的充磁方向長度。
齒槽轉矩在不通電的情況下永磁電機的永磁體與鐵心之間的相互作用力,可表示是磁共能W 與位置角α 的導數,即:

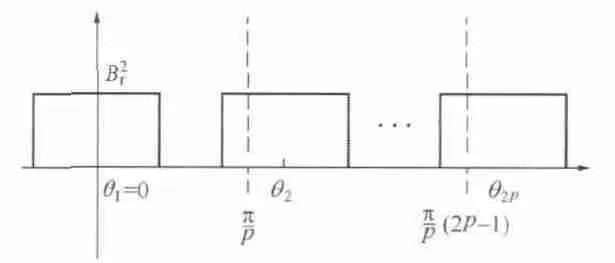
圖7 永磁體不對稱時B2r(θ)示意圖
[hm/(hm+g(θ,α)]2的傅里葉展開表達式:
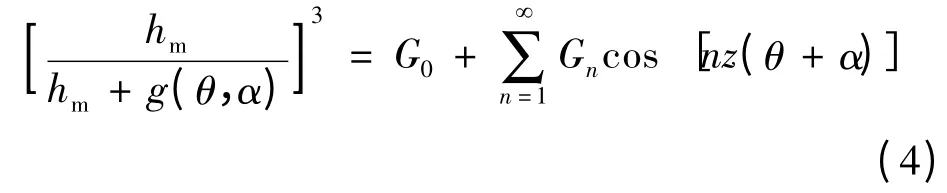
式中:Z 為定子槽數。
將式式(1)、式(3)、式(4)代入式(2)后磁極偏移的齒槽轉矩可表示:
式中:LFe為鐵心長度;R1為電樞外徑;R2為定子磁軛內徑。
Branz和Brbnz可表示:
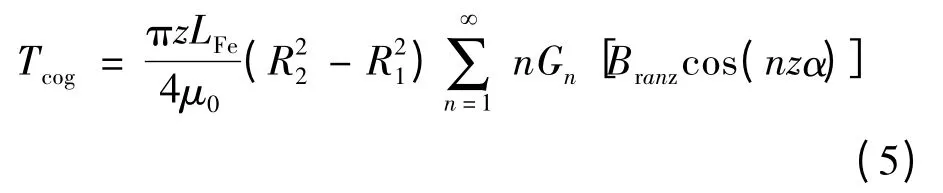
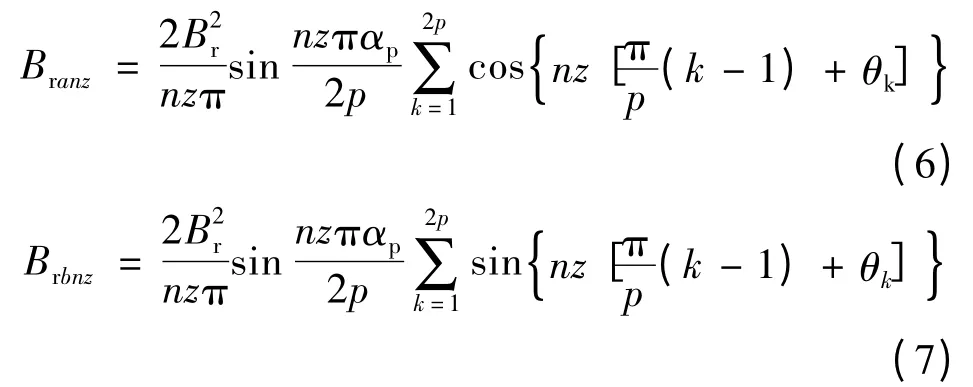
式中:αp為極弧系數。
對稱的永磁體可看作為一種特別情況,即θk=0。此時Brbnz恒為零,整理Branz得:
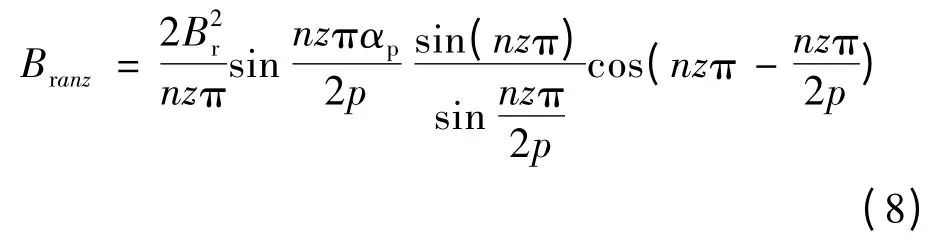
只有當n 為Np倍數時,Branz才不為零,Np滿足:

式中:GCD(z,2p)為2p 和z 的最大公約數。
對比式(6)、式(7)、式(8)可以發現,Branz和Brbnz各次諧波的幅值與n 有關,可以從消弱Branz和Brbnz的幅值入手,消弱各次諧波的幅值,從而達到降低齒槽轉矩的目的。本文利用ANSYS 有限元分析軟件,仿真找到最優的磁極偏移角度,從而電動機的齒槽轉矩能夠得到明顯抑制[7-9]。
3.2 磁極偏移角度的選擇
利用有限元分析軟件,仿真不同的磁極偏移角度對應電動機的齒槽轉矩,找出最小齒槽轉矩時對應的最佳磁極偏移角度,轉子結構如圖8 所示。通過對比分析磁極1、4 順時針偏移θ,磁極2、5 逆時針偏移θ;磁極3、6 不動。
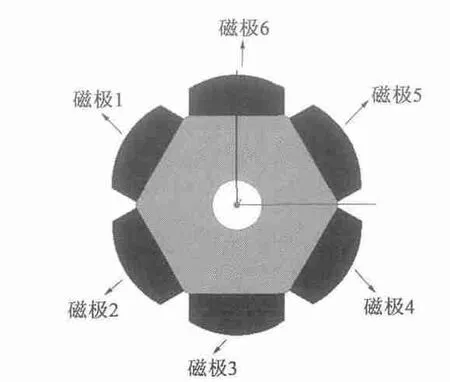
圖8 磁極偏移圖
磁極偏移不同角度,齒槽轉矩的值就不一樣,θ分別為0°、0. 5°、1°、1. 5°、2°、2. 5°、3°、3. 5°、4°、4.5°、5°時,電機齒槽轉矩的幅值有一定的變化規律。首先隨著偏移角度的增加,齒槽轉矩的幅值減小,偏移到了一定角度后,隨著偏移角度的增加,齒槽轉矩的幅值反而增大。通過對比發現,當θ 為3°時,該款電動機齒槽轉矩幅值最小,其值為3 mN·m,為磁極沒偏移前的9.5%左右,齒槽轉矩波形對比如圖9 所示。
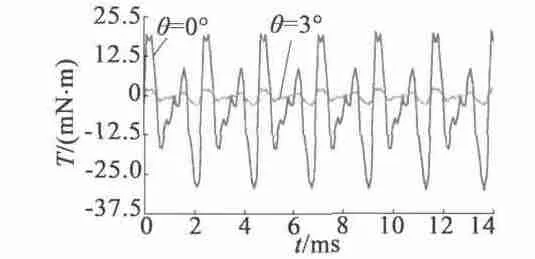
圖9 最佳磁極偏移角度齒槽轉矩對比圖
由以上分析和仿真可知,一定范圍內的磁極偏移角度可以有效地削弱無刷直流電動機的齒槽轉矩,抑制轉矩波動,改善電機本體的性能。
4 樣機制作與試驗驗證系統噪聲的對比實驗
根據上文的分析與仿真,制作了基于FCM8531雙核控制器正弦波控制結合磁極偏移技術的樣機,樣機本體如圖10 所示,無刷直流電動機驅動工業風扇如圖11 所示,并在相同條件下進行噪聲實驗。
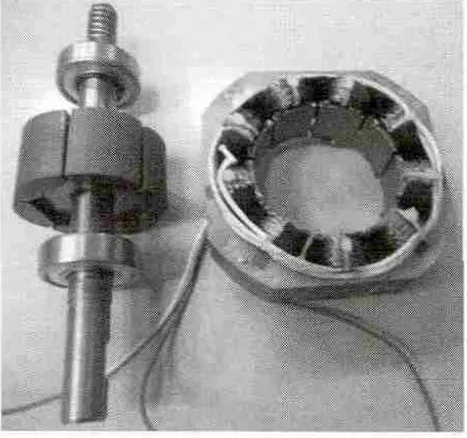
圖10 樣機本體圖
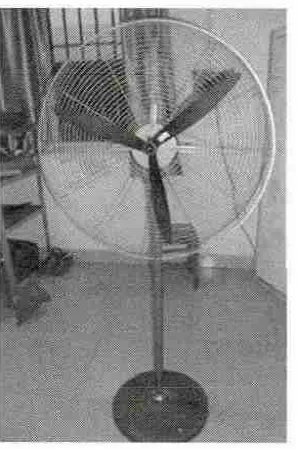
圖11 無刷直流電動機驅動風扇圖
當采用方波驅動、且無磁極偏移的無刷直流電動機時,工作電流波形如圖12 所示,噪聲幅值為70.5 dB,電流波形畸變嚴重。
采用本文設計的基于FCM8531 控制方案驅動最佳磁極偏移的無刷直流電動機,工作電流波形如圖13 所示,測試的電機噪聲幅值為48.5 dB,其電流波形比較接近正弦波,毛刺明顯減少,與方波控制并且沒有采用磁極偏移技術的樣機比較,電動機樣機的振動和噪聲抑制效果明顯,電機效率有所提高,電機的起動性能得到明顯改善,這就是采用FCM8531控制方案驅動最佳磁極偏移的無刷直流電動機降低了電動機齒槽轉矩的效果。
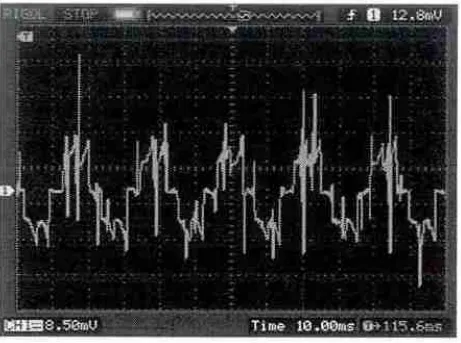
圖12 方波驅動時電流圖
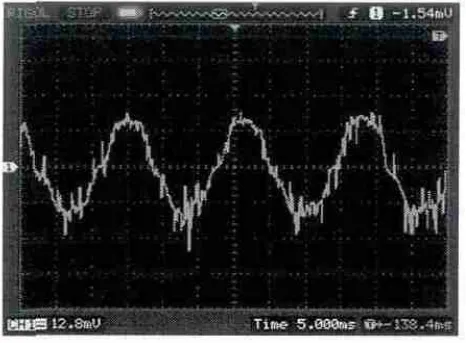
圖13 正弦波驅動時電流圖
5 結 語
無刷直流電動機采用方波控制方式,由于換向電流急劇變化,會產生振動和噪聲,嚴重影響電機的性能。采用集成兩個并行器的FCM8531 控制系統驅動最佳磁極偏移角度的無刷直流電動機,不僅有效地抑制了電機的振動和噪聲,還改善了電機降低電機的起動性能以及電機效率的提高。
對于電機本體的設計,一定的磁極偏移角度,可以降低齒槽轉矩的幅值,抑制轉矩脈動,從而抑制電機的振動和噪聲,并且可以提高電機的起動性能。
采用集成兩個并行器的FCM8531 控制系統驅動最佳磁極偏移角度的無刷直流電動機,不僅能明顯地抑制電機的振動和噪聲,還改善電機的起動性能。該方案已應用于一款工業風扇中。
[1] 李建軍,鄒繼斌,徐永向.無刷直流電動機噪聲分析及其抑制[J].微特電機,2009,37(3):12-14.
[2] 曾麗,吳浩烈,肖瑩. 基于DSP 的無位置傳感器無刷直流電機控制系統的設計[J].微電機,2010,43(10):63-66.
[3] HUNG J Y,DING Z.Design of currents to reduce torque ripple inbrushless permanent magnet motors[C]//IEEE proceedings-B,1993,140(4):260-266.
[4] 李穎,馬瑞卿,劉冠志,等.一種基于SPWM 的無刷直流電動機驅動新方法[J].微電機,2010,43(1):42-45.
[5] 袁偉濤,張連凱.300V 無刷直流電機控制系統的設計[J]科技信息(學術版),2008(8):16-17.
[6] 陳風凱,黃開勝,陳治宇,等.正弦波驅動的無刷直流電動機控制系統設計[J].微特電機,2014,42(1),57-59.
[7] 王秀和.永磁電機[M].北京:中國電力出版社,2007.
[8] 郝雪莉. 永磁電動機電磁振動噪聲的計算分析研究[D]. 沈陽:沈陽工業大學,2010:46-47.
[9] 郭仁,黃守道,高劍,等.一種基于磁極偏移的永磁電機齒槽轉矩最優削弱方法[J].微特電機,2010,38(10):46-50.
