采用DSP和FPGA多電機速度伺服驅動控制平臺
2011-06-06 10:02:34于凱平郭宏吳海洋
電機與控制學報 2011年9期
于凱平, 郭宏, 吳海洋
(北京航空航天大學自動化科學與電氣工程學院,北京 100191)
0 引言
速度伺服是伺服控制系統的重要組成部分之一,在電動汽車、電動輪椅和機器人等領域有廣泛應用[1-3]。在這些領域中,往往需要同時使用多臺電機,并且具有速度同步控制的需求。傳統的方式,都是采用基于單個微控制器或單個定點數字信號處理器(digital signal processor,DSP)的控制器控制單臺電機,這些控制器之間通過總線通訊實現速度的同步控制,其存在兩點不足[4-5]:孩系統結構復雜,成本高;虎控制器難以實現多電機系統的復雜速度伺服控制算法。近年來,現場可編程門陣列(field programmable gate array,FPGA)已逐漸應用于電機控制中。FPGA可以替代復雜的邏輯電路,在簡化系統結構,實現控制器小型化等方面發揮重要作用[6]。因此,基于DSP+FPGA的控制平臺技術是目前電機驅動伺服領域的研究熱點之一[7-11]。并且,在控制平臺中采用浮點DSP便于實現復雜的控制算法,完成高精度的速度伺服控制。
設計了一種以浮點DSP和低成本FPGA為核心的控制平臺,劃分了DSP和FPGA各自承擔功能,并介紹了具體的實現。以2臺無刷直流電動機(brushless DC motor,BLDCM)為控制對象,對基于DSP+FPGA的多電機驅動控制平臺的功能進行了驗證。
1 控制平臺的結構和功能
多電機速度伺服系統的結構包括一個控制平臺,兩個驅動器和兩臺BLDCM,如圖1所示。
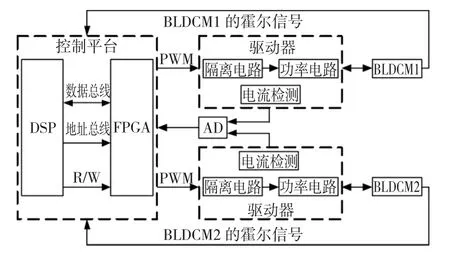
圖1 多電機速度伺服系統的結構Fig.1 The structure of multi motors speed-servo system
設計的控制平臺以浮點DSP-TMS320VC33和低成本FPGA-EP2C8為核心,需要完成的功能包括:
1)接收速度指令;
2)完成速度環計算;
3)完成電流環計算;
4)產生PWM控制信號;
5)獲取速度檢測值;
6)獲取電流檢測值。
浮點DSP適合實現控制算法,FPGA善于完成時序電路和邏輯電路。因此,確定DSP作為主控制器,需要完成的功能包括1)、2)和3),FPGA作為從控制器,需要完成的功能是4)、5)和6)。二者之間交換的數據包括:DSP從FPGA讀取電機的速度檢測值、電流檢測值,DSP下發電流環計算結果給FPGA。
2 DSP功能設計
主控制器DSP承擔的功能主要是控制算法的計算,2臺電機的速度環和電流環均采用的增量式數字PI控制算法,控制算式為

式中:u(k)為當前輸出;u(k-1)為前次輸出;e(k)為當前偏差;e(k-1)為前次偏差;KP為比例系數;KI為積分系數。
DSP的程序分為兩個部分:主程序和中斷處理程序,流程如圖2所示。電流環計算頻率為10kHz,速度環計算頻率為1kHz。
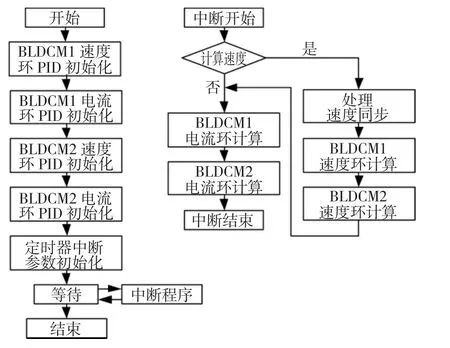
圖2 DSP的主程序和中斷程序流程Fig.2 The programming flowchart of DSP
兩臺BLDCM的速度指令可以獨立輸入,也可以給出協同關系,由中斷處理程序中的速度同步模塊進行處理,非常簡便。
3 FPGA功能設計
在從控制器FPGA的設計中,采用自頂至下的設計方法。將FPGA需要完成的功能劃分為若干個功能獨立的功能模塊,各個模塊可以單獨進行測試、驗證,然后在頂層實體中直接調用。該方法可以縮短開發時間,便于查找問題、修改和功能升級。根據FPGA所承擔的功能、結合FPGA的特點,劃分了雙口RAM模塊、PWM發生模塊、A/D控制模塊、BLDCM1速度檢測模塊和BLDCM2速度檢測模塊等5個功能模塊,如圖3所示。設計流程如下:
1)采用VHDL完成設計輸入;
2)綜合和邏輯優化;
3)布局、布線;
4)功能仿真和時序仿真;
5)布局優化;
6)配置到EP2C8,硬件調試。
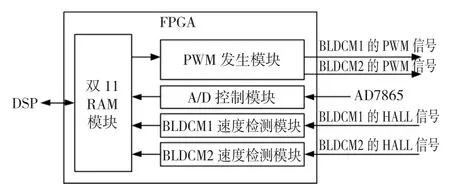
圖3 FPGA功能模塊圖Fig.3 The functional modules of FPGA
3.1 雙口RAM模塊設計
DSP與FPGA之間的所有數據都通過雙口RAM模塊交換,該模塊在FPGA內部實現,不用外接專用的雙口RAM芯片,簡化了控制平臺的結構,提高了可靠性,充分利用現有硬件的資源,能夠實現DSP與FPGA之間的高速數據交換。對DSP而言,FPGA就是一個片外存儲器,使用地址線、數據線和R/W信號即可輕松訪問。雙口RAM模塊由兩個部分組成,一部分是調用Altera提供的基本宏功能產生的雙口RAM部分,另一部分是數據讀寫部分。數據讀寫部分采用有限狀態機實現,將FPGA需要上傳給DSP的數據,如速度檢測值、電流檢測值等,寫入雙口RAM部分;從雙口RAM部分讀取DSP寫入的電流環計算結果。
3.2 PWM發生模塊設計
采用三角波比較法產生PWM,將DSP下發的2臺BLDCM電流環計算結果與模塊中增減計數器產生的同一三角波進行比較后產生12路PWM信號。計算結果大于三角波數值時,輸出上橋功率管的導通信號;計算結果小于三角波數值時,輸出上橋功率管的關閉信號。導通相序相應的下橋功率管恒導通。在導通時間段的中點,產生A/D啟動信號。通過改變PWM發生模塊的參數,即可方便的調整PWM斬波頻率。在關閉時間段的中點同時載入2臺電機的電流環計算結果,保證電機PWM信號的同步。PWM發生模塊的設計時序如圖4所示,圖中,M1PWMIN和M2PWMIN分別是DSP下發的2臺BLDCM的電流環計算結果,TRI-ANG是增減計數器產生的三角波,ADSRART是A/D啟動信號,M1PWMVx和M2PWMVy分別是2臺BLDCM的PWM信號。
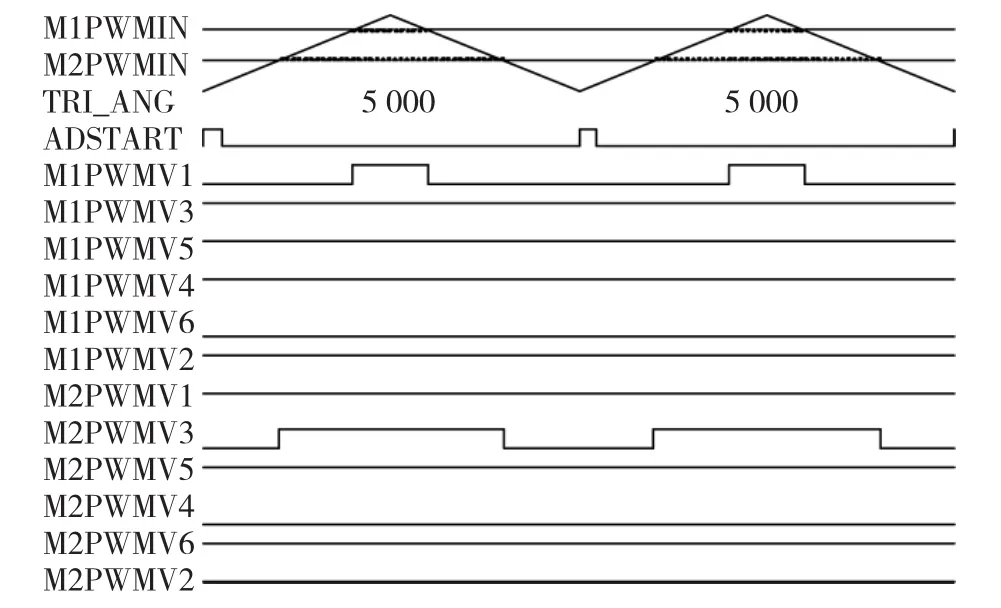
圖4 PWM發生模塊時序圖Fig.4 The timing diagram of PWM module
3.3 A/D控制模塊設計
使用有限狀態機設計了A/D控制器來實現A/D的采樣控制。有限狀態機的時序根據AD7865的時序編寫,如圖5所示,分為開始、等待啟動信號、開始轉換、等待轉換結束、讀取1通道結果、讀取2通道結果、讀取3通道結果和讀取4通道結果等狀態。AD7865的工作頻率和PWM的載波頻率一致,都是10kHz,并且在導通時間段的中點進行母線電流采樣。
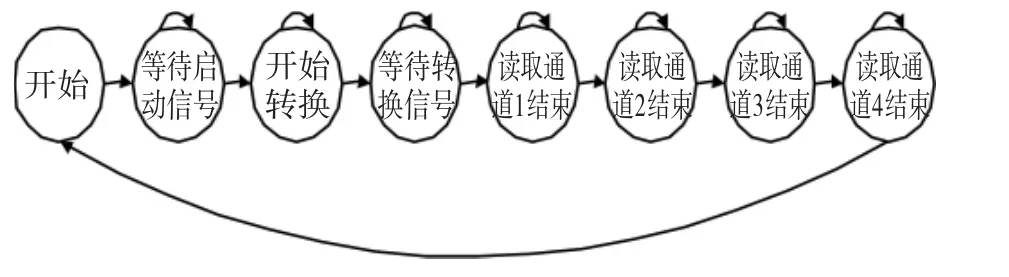
圖5 A/D模塊的狀態機Fig.5 The state machine of A/D module
3.4 速度檢測模塊設計
BLDCM的額定轉速是3000 r/min,使用T法測速可以得到較高精度。考慮到開關型霍爾器件只對S磁極作用引起的霍爾信號正負半周期不對稱的問題,對霍爾信號的1個完整周期進行計數來檢測速度,即在霍爾信號的上升沿開始計數,在下一個上升沿結束計數。將霍爾信號的上升沿進行了處理,保證對霍爾信號的每個周期都能夠計數。BLDCM速度的計算公式為式中:n為電機速度,單位是r/min;f為計數時鐘頻率,單位是Hz;p為BLDCM的極對數;M為計數值。

模塊的計數時鐘頻率是10kHz。最終,BLDCM的速度計算公式為

按照式(3)處理霍爾信號計數值,得到了BLDCM的速度,將其作為速度檢測模塊的輸出。
4 仿真結果
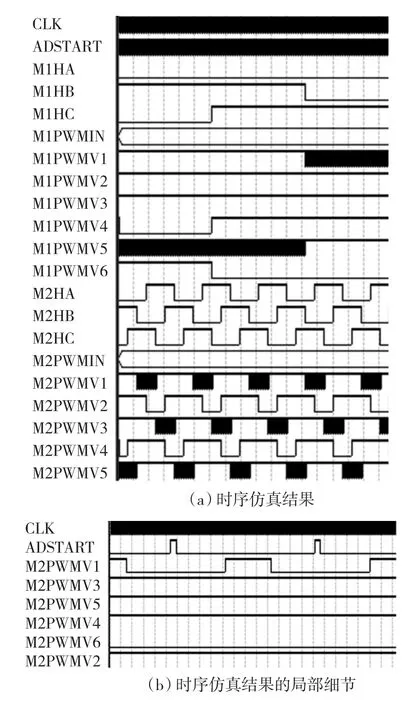
圖6 PWM發生模塊的時序仿真結果Fig.6 The timing simulation result of PWM module
如前所述,按照FPGA功能模塊的設計流程,對各個功能模塊進行了功能仿真和時序仿真。在QuartusII 7.0的環境中創建了功能模塊的矢量波形文件,使用該文件作為激勵,進行了功能仿真和時序仿真。其中,PWM發生模塊和速度檢測模塊的時序仿真結果如圖6和圖7所示。圖6中,M1和M2分別表示BLDCM1和BLDCM2的信號。MxHy是三相霍爾輸入信號,MxPWMIN是DSP下發的電流環計算結果,MxPWMVy是6路PWM輸出信號,輸出信號低電平時功率管導通。從圖6(a)可以看出,電流環計算結果可以獨立給定,即電機是速度獨立運行還是速度協同運行可由DSP確定。由圖6(b)可知,A/D啟動信號是在導通時間段中點產生的。圖7中,CLK是計數時鐘,HALL是霍爾輸入信號,SPEEDTEMP是計數值,SPEEDOUT是計算得到的電機速度。從圖7(a)可以看出,速度檢測模塊能夠對每個霍爾信號進行計數,得到相應的計數值和真實速度。圖7(b)中,HA-C、HA-D、HA-A 和 HAB依次對HALL信號進行延時,當后兩個信號的組合HA-BUF-A等于2,即霍爾信號出現上升沿時,產生計數啟動信號START。霍爾信號的下一個上升沿來臨時,前兩個信號的組合HA-BUF-B等于2,產生計數停止信號STOP。2個計數時鐘周期后,又開始了新的計數。能夠完成對霍爾信號的每個周期進行計數的功能。仿真結果表明,各個功能模塊的功能和時序能夠滿足要求。
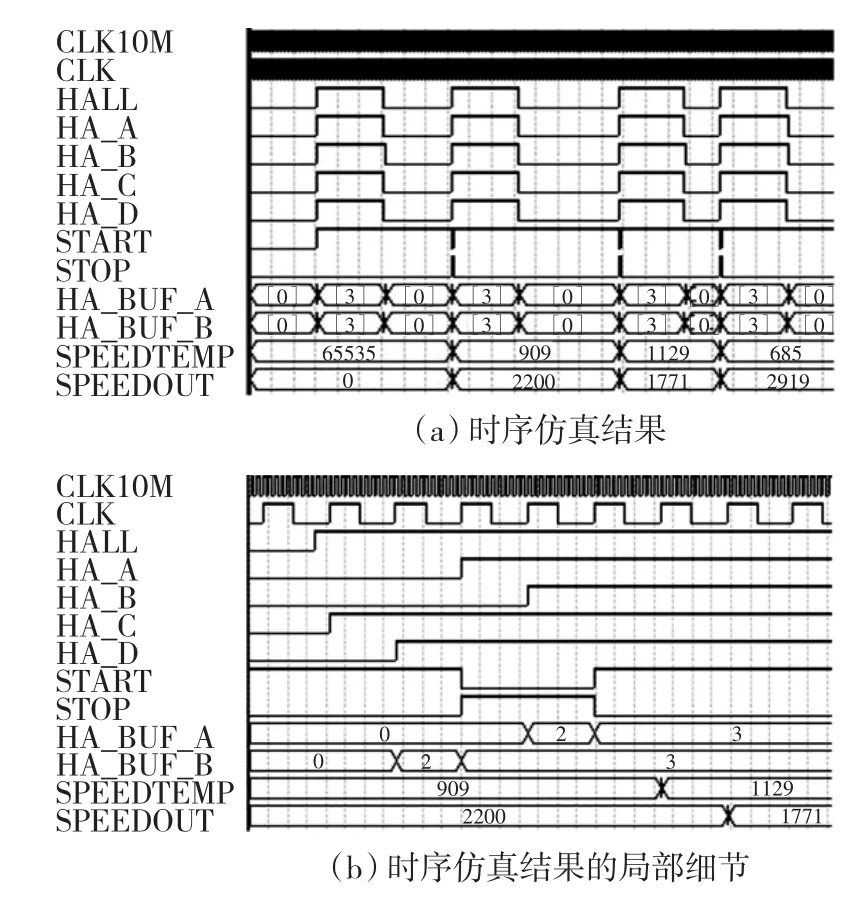
圖7 速度檢測模塊的時序仿真結果Fig.7 The timing simulation result of speed acquisition module
5 實驗結果
速度伺服實驗系統使用的BLDCM的參數是:額定電壓200 V;額定轉速3000 r/min、額定轉矩1.6 N·m;極對數 3;轉子轉動慣量 2.79×10-4kg·m2;相電阻 1.54 Ω;相繞組自感 6.5 mH;相繞組互感0.62 mH。BLDCM的繞組為星型連接,采用兩相導通三相六狀態的工作方式,使用開關型霍爾元件A3144進行換相和速度檢測。
驅動器包括功率電路、隔離電路、電流檢測電路、A/D電路等。功率電路選用IRAMS10UP60B集成功率模塊。選用高速光耦HCPL2531實現PWM信號的隔離。選用霍爾電流傳感器LTS6-NP檢測母線電流。A/D選用14位、4通道同時采樣、并行輸出的AD7865AS-2。
對2臺BLDCM進行同步控制的實驗結果如圖8所示,BLDCM1的速度是2500 r/min,BLDCM 2以2800 r/min的速度跟隨運行。同時對2臺BLDCM進行獨立控制的實驗波形如圖9所示,BLDCM1的速度在2500 r/min和-2150 r/min之間交替變化;BLDCM2的速度在-2200 r/min和1800 r/min之間交替變化。
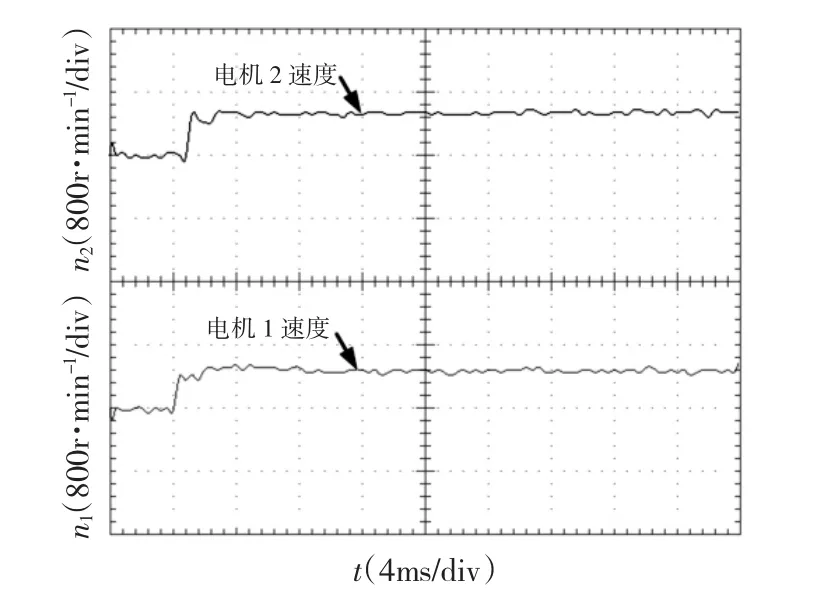
圖8 BLDCM速度同步控制Fig.8 Synchronizing speed control of BLDCM
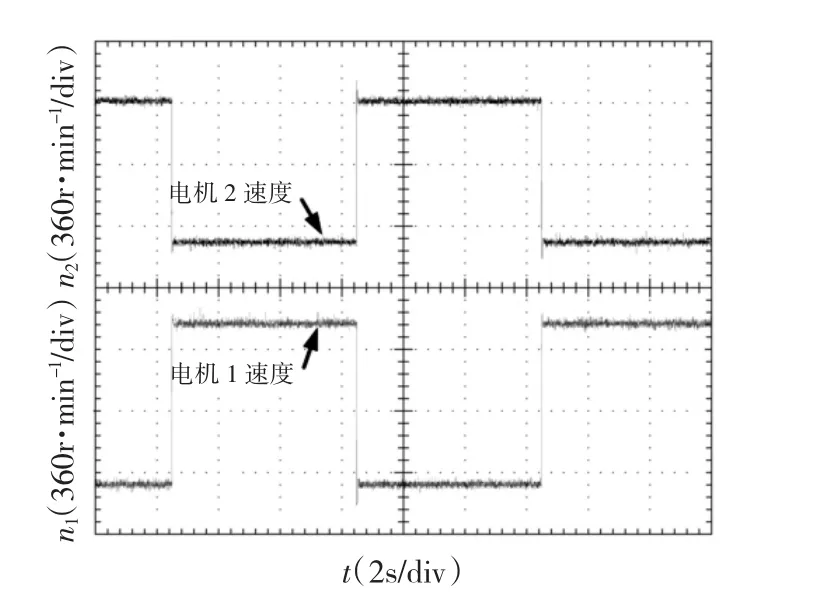
圖9 BLDCM速度獨立控制Fig.9 Individual speed control of BLDCM
5 結語
設計了一種基于DSP和FPGA的電機速度伺服驅動控制平臺,采用自頂至下的模塊化設計方法實現了DSP和FPFA的功能設計。實驗結果表明,該驅動控制平臺能夠很好的同時完成對2臺BLDCM的獨立或者協同速度伺服控制。該方案簡化了速度伺服系統的結構、降低了成本,并且具有良好的功能擴展性和實現多電機的復雜速度伺服控制的能力。在高精度的速度伺服系統中,也具有很好的應用前景。
[1]TAHAMI F,KAZWMI R,FARHANGHI S.A novel driver assist stability system for all-wheel-drive electric vehicles[J].IEEE Transactions on Vehicular Technology,2003,52(3):683-692.
[2]SHIM H M,HONG J P,CHUNG S B,et al.A powered wheelchair controller based on master-slave control architecture[C]//Proceedings of IEEE International Symposium on Industrial Electronics,June 12 -16,2001,Pusan,South Korea.2001,3:1553-1556.
[3]熊光明,曹曉燕,高峻峣,等.基于速度控制的輪式滑動轉向移動機器人航向跟蹤[J].北京理工大學學報.2004,24(8):663-666.XIONG Guangming,CAO Xiaoyan,GAO Junyao,et al.Heading following of wheeled skid-steer mobile robots based on speed control[J].Journal of Beijing Institute of Technology.2004,24(8):663-666.
[4]AL-AYASRAH O,ALUKAIDEY T,PISSANIDIS G.DSP based n-motor speed control of brushless DC motors using external fpga design[C]//IEEE International Conference on Industrial Technology,December 15 - 17,2006,Mumbai,India.2006:627-631.
[5]ZHANG Da,LI Hui.A stochastic-based FPGA controller for an induction motor drive with integrated neural network algorithms[J].IEEE Transactions on Industrial Electronics,2008,55(2):551-561.
[6]DUBEY R,AQARWAL P,VASANTHA K M,Programmable logic devices for motion control-a review[J].IEEE Transactions on Industrial Electronics,2007,54(1):559 -566.
[7]AL-AYASRAH O,ALUKAIDEY T,PISSANIDIS G.Mixed signal DSP based multi task motion control system using external FPGA structural design[C]//IEEE Indicon Conference,December 11-13,2005,Chennai,India.2005:419 -422.
[8]XU Dong,WANG Tianmiao,WEI Hongxing,et al.A new dualcore permanent magnet synchronous motor servo system [C]//IEEE Conference on Industrial Electronics and Applicatons,May 25 -27,2009,Xi’an,China.2009:715 -720.
[9]LI Bo,SUN Li,KANG Erliang,et al.High performance and full digital AC position servo system[C]//International Conference on Electrical Machines and Systems,September 27-29,2005,Nanjing,China.2005,3:1869 -1872.
[10]BAI Yucheng,TANG Xiaoqi,CHEN Jihong,et al.Research on ultra-low speed control of PMSM in servo system [C]//World Congress on Intelligent Control and Automation,June 25-27,2008,Chongqing,China.2008:2381 -2386.
[11]王大彧,郭宏.采用DSP和FPGA直驅閥用音圈電機驅動控制系統[J].電機與控制學報,2011,15(4):7-12 WANG Dayu,GUO Hong.A DSP and FPGA based drive control system for voice coil motor used in direct drive valve[J].Electric Machines and Control,2011,15(4):7 -12.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55