考慮前車減速狀況的跟隨車安全距離分析
2011-02-28 09:28:18鄭茂才
湖南交通科技 2011年2期
關鍵詞:駕駛員
鄭茂才
(湖南省農林工業勘察設計研究總院,湖南長沙 410007)
0 前言
隨著高速公路的迅速發展,高速公路的交通事故一直呈上升趨勢。而追尾碰撞是高速公路交通事故的主要類型之一。如何防止追尾碰撞事故,確定跟隨車的臨界安全車距,顯得尤為重要。而安全車距數值的多少,根據汽車運行中的速度高低、氣候、道路的好壞、駕駛員反應的快慢和汽車制動的技術狀態等因素綜合分析累計而成。然而在很多的追尾碰撞事故中發現:當前車已非正常制動減速時,跟隨車往往會發生追尾碰撞交通事故。沒有考慮前車減速狀況的跟隨車安全車距縮小了它的適用范圍,降低了它的指導行車安全的科學性[1]。針對此缺陷,本文通過研究前車不同的減速狀況、駕駛員的不同反應時間與跟隨車安全車距的關聯,建立新的跟隨車安全車距公式,對減少“尾碰撞”事故,更好地、科學地指導安全行車,促進交通安全具有現實的意義。
1 傳統的臨界安全車距計算公式
1.1 定義
安全車距:即安全行車間距,指行駛在高速公路上同一車道的后車與前車之間為保證交通安全而必須保持的行車間距,如果前、后兩車行車間距保持在此距離以上,則不會發生追尾碰撞類交通事故。
臨界安全車距:即臨界安全行車間距,是指為保證安全而兩車之間必須保持的最小行車間距[2]。
1.2 傳統的臨界行車安全車距計算公式的推導
根據參考文獻[3,4],傳統的臨界行車安全車距計算公式的推導如下:設1號車為前車,2號車為后車,當后車駕駛員發現前車制動信號燈亮時隨之制動直至停車,需要經過3段時間:即后車駕駛員制動感覺反應時間t1、后車制動協調時間t2和持續制動時間t3
[5],在這3段時間內汽車所行駛的距離分別為S1、S2和S3。它們的和為后車的制動行駛距離SF。t1時間內后車做勻速運動。t2可以分為制動傳遞延遲時間t′1和制動增長時間t″2。那么t′1時間內仍然以勻速運動來計算;t″2時間內,制動力成線型增長為變減速運動,經積分變換后可求得該段時間內所走距離。在t3時間內,后車做勻減速度運動。車速以m/s為單位,距離以m為單位,可以求出SF為:
式中:V0為后車制動前的初速度;ja2為后車的制動減速度。
令t=t1+t′2。通常稱t為制動操作反應時間,它包括駕駛員的制動反應時間和制動傳遞延遲時間,又因t″2非常小,故可忽略不計,則后車的制動行駛距離公式簡化為:
對于前車來說,從后車發現其制動信號燈亮算起到制動停車止,前車所走的距離應是該車持續制動時間內所走的距離。可得前車的持續制動距離簡化公式為:

式中:SQ為前車持續制動距離;ja1為前車制動減速度;V0為前車制動前的初速度,因高速公路為穩定交通流,可認為前后兩車的初速度是相等的。
所以臨界安全車距為:

式中:SV為前后兩車的行車安全距離;S0為制動停車后前車車尾距后車車頭間的安全間距。
2 傳統的臨界行車安全車距計算公式分析
通過上面的計算公式的推導過程來看,筆者發現其公式的推導以前車正常制動為條件,即前車處于正常的減速狀態。但交通事故往往發生在車輛不是以正常制動的情況下。從定義來看,臨界安全行車間距,是指為保證安全而兩車之間必須保持的最小行車間距。然而以此為條件的臨界安全車距并不能保證車輛的安全,并且還有可能誘發連環追尾碰撞的交通事故。
傳統計算臨界安全車距公式以前車的正常的減速狀態為條件,即前車以正常制動減速度ja1,使前車的速度變為0[5,6]。然而當前車發生交通事故時,前車并非以正常的制動減速度方式停止,即前車并非以正常制動減速度ja1使前車速度變為0。當前車發現前面有障礙物或者緊急的情況,前車有3種形式是速度變為0。
第一種形式:前車以正常的制動減速度使得速度變為0,也就是傳統計算公式中所用的條件,即前車以正常的減速度ja1使前車的速度變為0,那么在此種情況下,臨界安全車距公式(4)是具有很好的指導意義的。
第二種形式:當前車發現前面有障礙物時或者有緊急情況,前車開始以正常制動,但是由于各種原因,前車速度還沒有變為0時,前車就與障礙物相撞。前車與障礙物相撞后車速變為0。
假設1號車發現前方有障礙物或者緊急情況時,經過反應及動作時間,汽車以制動減速度ja1作勻減速階段,最后以車速Vc與障礙物相撞。那么在此段時間內,前車行駛的距離為:

當2號車發現1號車制動信號燈亮,2號車制動行駛距離SF為公式(2)計算所得。
那么臨界的安全車距計算公式為:
第三種形式:當前車前面有障礙物或者發生緊急情況,前車駕駛員還沒有時間進行制動,前車速度V0駛向障礙物,相撞之后,前車的速度變為0。當后車發現前車發生碰撞后,后車開始制動。
前車的制動距離SQ就為變為0,那么當后車發現前車發生事故后,進行反應和制動,那么后車制動行駛的距離SF為公式(2)計算所得。
那么臨界的安全車距計算公式為:

通過上面的分析,由于后車駕駛員很難預料前車面臨的狀態,如果以第一種正常減速為條件所得的SV作為臨界行車安全車距,當前車發生交通事故時,或當跟隨車駕駛人由于注意力不集中時,前車已經停車,反而容易導致追尾碰撞事故。所以根據臨界行車安全距離的定義,筆者認為應該選取前車的第三種減速形式作為臨界安全車距的條件,則臨界安全車距計算公式為公式(7)。
3 計算實例
根據中國當前高速公路的實際情況,汽車行駛的速度為60~120 km/h,即16.7m/s≤V0≤33.3 m/s;考慮到安全問題,兩車停止時需保持的距離S0≥3m[7],本文取S0為3m。
考慮基準條件下(正常情況),即跟隨車和引導車的制動強度大致相等,而車輛制動減速度按照路面附著系數的平均值來取。干燥路面取為6m/s2,潮濕路面取為5m/s2,積雪路面取為2.85 m/s2[8],所以本文取干燥路面的ja1=ja2=6 m/s2,并且在第二種減速形式中,假設進行計算。
在傳統的臨界安全車距的計算中,t1的取值為制動感覺反應時間的平均值[9]。根據臨界安全車距的安全條件,就必須考慮駕駛員的感覺反應時間的分布。
統計分析表明:經驗的制動感覺—反應時間概率不是正態分布,其對數呈逼近的正態分布,圖1為感覺反應時間的對數正態分布。
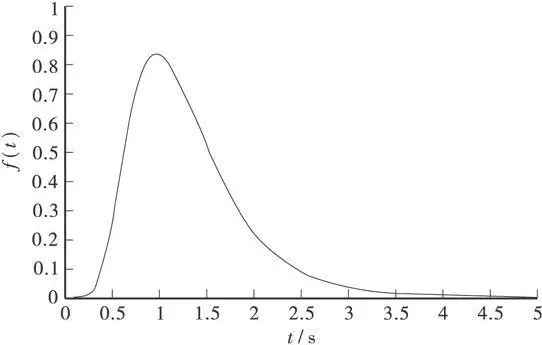
圖1 駕駛員的制動感覺—反應時間分布
Lerner[10]等人對制動感覺反應時間作了進一步研究,通過對數正態分布將這些數據轉化,得到表1的數據。

表1 制動感覺—反應時間t1 s
選取概率為5%到概率95%對應的制動感覺反應時間之內的值進行計算(t′1取0.2 s[11]),即取0.77 s≤t≤2.65 s。
計算結果見圖2、圖3。其中圖2是根據傳統跟隨車的臨界安全車距的公式(4)計算的結果。圖3是考慮前車不同的減速狀態的跟隨車臨界安全車距計算的結果,圖3中的1是公式(7)計算的結果;2是公式(6)計算的結果;3是公式(4)計算的結果。
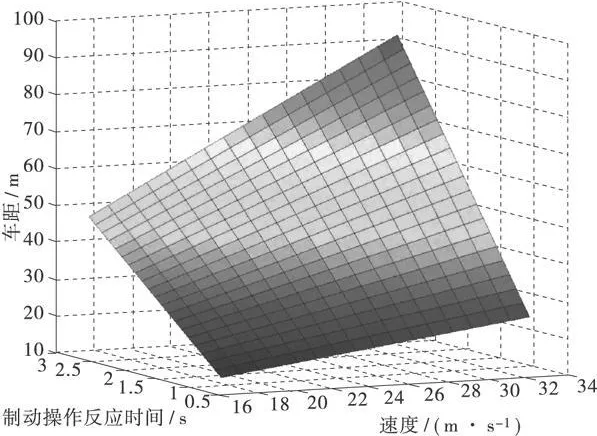
圖2 傳統公式計算的跟隨車臨界安全車距
從圖3可知,前車的減速狀況對跟隨車安全車距影響很大,并且隨著速度的增大,前車沒有制動減速這一過程的臨界安全車距與前車正常制動減速的臨界安全車距的差值也越大,那么在高速的情況下,傳統的跟隨車安全車距很難保證安全。所以在車速比較高的路段,特別是在高速公路上,更應該考慮前車的減速狀況,確保行車安全。在實際情況中,由于視距、道路線形、駕駛員、車輛等原因,前車發生碰撞,沒有進行正常制動減速,如果后車以前車正常制動減速所得的臨界安全車距進行跟隨,由于車間距離過小,很可能與前車相撞,從而引發連環追尾的特大交通事故。同時從圖2、圖3還可以看出,駕駛員制動操作反應時間的差異對臨界安全車距影響也非常大,選取合適的制動操作反應時間指導安全行車是至關重要的,根據臨界安全行車車距的安全需要和統計學原理,取概率為95%對應的制動感覺反應時間是合理的。綜上所述,在干燥的路面上,取概率為95%對應的制動感覺反應時間和前車沒有制動減速的一個過程為條件計算所得的臨界安全車距是能夠很好地指導駕駛員安全行車。
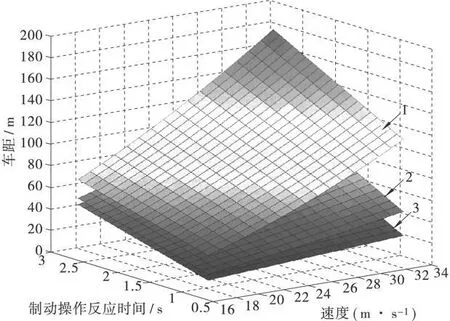
圖3 考慮前車不同減速狀況的跟隨車臨界安全車距
4 結論
臨界安全車距對于指導駕駛員安全行車和預防高速公路汽車追尾具有重要的意義,前車的減速狀態對臨界安全車距影響是隨著速度的增大而增大,所以在車速比較高的時候,考慮前車減速狀態和駕駛員的不同反應時間的臨界行車安全車距能夠更好地保證行車安全,同時對于預防連環追尾的特大交通事故也具有十分積極的作用。
[1]馬 駿.高速公路行車安全距離的分析與研究[J].西安公路交通大學學報,1998,18(4):90-94.
[2]鐘 勇,姚劍峰.行進中車輛臨界安全車距的探討[J].湖南大學學報,2001,28(6):54-59.
[3]徐 杰,杜 文,孫 宏.跟隨車安全距離的分析[J].交通運輸工程學報,2002,2(1):100-104.
[4]鄭安文,張炳煥.高速公路不同跟車狀態下安全行車間距分析[J].武漢科技大學學報,2003,26(1):54-57.
[5]徐吉謙.交通工程總論[M].北京:人民交通出版社,2002.
[6]Kiyoshi Minami,yasuma,Shigeru Okabayashiet al.A Collision Avoidance warning System Using Laser Radar[J].SAE transaction section 5-joural of Aerospace,1998,97:830-836.
[7]Walter UL Ke,Roll Adomat,Karlheinz Butscher and Wolfgang lauer.Radar Based Automotive Obstacle Detection System[J].SAE transactions section 6-journal of passenger cars,1994,103:1224-1236.
[8]唐文杰.汽車安全車距的安全度評定系統研究[J].現代制造工程,2005(11):50-52.
[9]唐琤琤.限速、車速與安全[J].公路交通科技,2005(3).
[10]胡 紅,劉小明,楊孝寬.基于最小安全間距的應急交通疏散車輛跟馳模型[J].北京工業大學,2007(10).
[11]丁建友,李鐵柱,李文權.高速公路安全行車間距與追尾事故預防[A].2007第三屆中國智能交通年會論文集[C].2007.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50