壓電式振動給料器驅動部件的力學分析*
2010-09-11 09:12:14譚曉東
制造技術與機床 2010年3期
譚曉東 張 坤
(大連交通大學,遼寧大連 116028)
壓電式振動給料器驅動部件的力學分析*
譚曉東 張 坤
(大連交通大學,遼寧大連 116028)
利用ANSYS軟件分析了壓電式振動給料器驅動部分,提取了固有頻率和應力分析圖,計算得出了幅頻特性曲線。研究共振彈簧與系統共振頻率之間的關系,找出了振動料斗的共振頻率范圍,為更好的自動化控制提供理論依據。
壓電振動給料器 壓電振子 共振頻率
1 整體機械結構
壓電振動給料器主要由以下幾個部分組成:料斗、驅動部分(包括雙壓電晶片振子和共振彈簧)、支撐部分(包括支撐用的基板和共振彈簧)、底座、減震裝置等幾個主要部分[1]。共有三組壓電雙晶片,在水平360°內均勻排布,起支撐與驅動的作用。其結構示意圖如圖1所示。
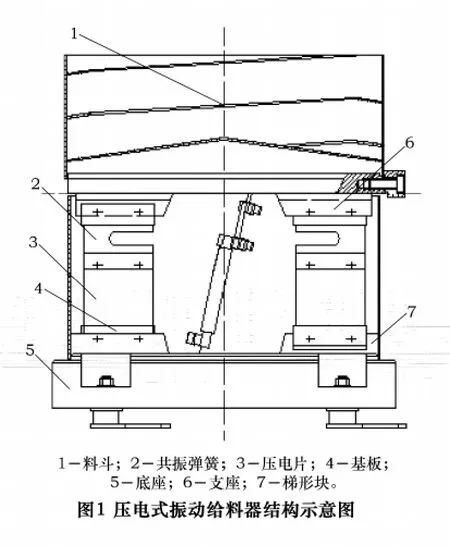
其工作原理:在雙壓電晶片振子上施加正弦交流電,隨之壓電雙晶片產生周期性簡諧振動,并伴有周期性激振力。板彈簧與減振彈簧產生彈性變形,帶動料斗和底座繞其軸線做相互反向的同步扭轉運動,同時在豎直方向也有上下微幅振動。當激勵電壓減小時,由于板彈簧儲存了足夠的彈性變形能,迫使料斗急劇改變運動方向[2]。如此上下循環往復,即形成高頻微幅振動。
2 壓電式振動給料器驅動部分設計
壓電式振動給料器驅動部分主要是由以下幾個部分組成的:用于支撐的基板、用于放大振幅的共振彈簧及振動源——雙壓電晶片振子組成。其驅動部件結構見圖2。
基板。主要用于聯接共振簧片與底座,同時可增加系統的剛度。支撐用的基板材料為65Mn的彈簧鋼。其結構和尺寸見圖3。其中l=110 mm,b=60 mm,t=2 mm。
雙壓電晶片振子。是壓電式振動給料器的驅動源,它是壓電式振動給料器的核心部分。其結構和尺寸大小決定了給料器的形狀和大小,同時其性能也決定了壓電式振動給料器 能否正常穩定的工作[3]。本論文中選用了PZT4壓電陶瓷晶片。將兩片壓電陶瓷晶片,分別粘接在基板的兩側,其極化方向相同。將一條導線焊接在壓電陶瓷晶片的兩表面,接電源的正極,另一條導線接地。其結構和尺寸見圖3,其中a=68.5 mm,b=60 mm,m-t=1 mm(m-t是壓電片厚度),壓電常數d31=186×10-12C/N,楊氏模量Y=6.2×1010Pa,泊松比 μ =0.3,密度 ρ=7.5 ×103kg/m3[4]。


由于雙壓電晶片振子自由端位移量較小,所以在雙壓電晶片振子的自由端安裝一個共振彈簧片,相當于一個位移放大機構,使壓電式振動給料器料盤表面獲得較大的振幅,達到最佳給料速度。同時也避免了料盤與雙壓電晶片振子的剛性接觸,使料盤能夠和雙壓電晶片振子分隔開來。同時共振簧片起到支撐料盤和料盤底座的作用,使整個結構更加安全,工作更加平穩[5]。本文壓電式振動給料器所采用的共振彈簧片為U型,彈簧片材料選擇65Mn的彈簧鋼,采用了不同尺寸的共振彈簧進行試驗,其結構及尺寸見表1。
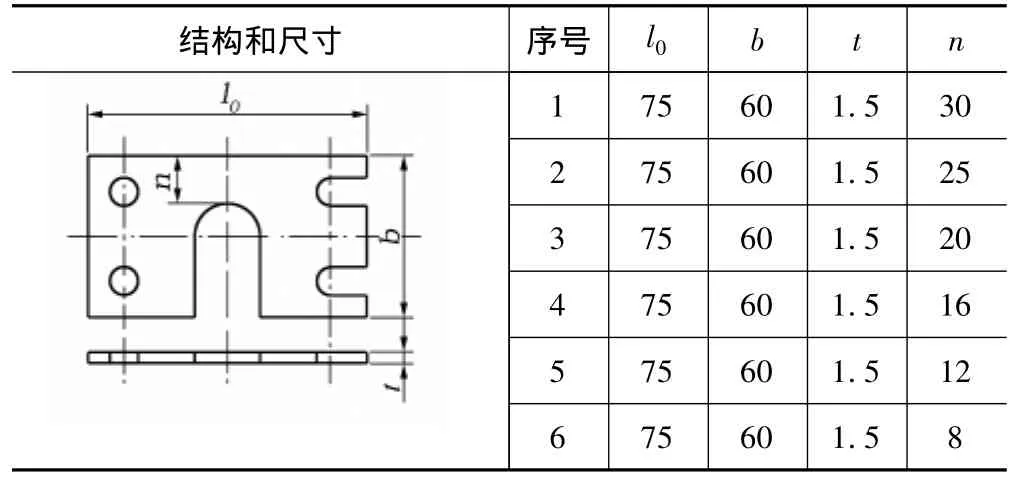
表1 共振彈簧片的尺寸 mm
65Mn的彈簧鋼的性能為:彈性模量E=2.06×1011Pa,泊松比 μ =0.3,密度 ρ=7.85 ×103kg/m3[6]。
3 壓電式振動給料器驅動部件的ANSYS分析
3.1 壓電逆效應
雙壓電晶片的電場分布是均勻的,且垂直于長度方向。此時在施加正弦電壓,產生的激振力是按簡諧運動規律周期變化。
設V=V0sinωt,則激振力使梁末端產生的位移大小為[7]

式中:x為雙壓電晶片末端位移;ω為激振角頻率;V0為激振電壓幅值;t為時間;l為雙晶片懸臂長度;a為壓電雙晶片長度;d31為壓電材料的壓電常數;V為施加的激振電壓。
壓電片在長度方向的伸縮將受到中間金屬片的限制,應該選擇特殊材料形狀的金屬片。要求金屬片和壓電陶瓷的線膨脹系數要盡量保持一致,以便增大壓電雙晶片的偏轉位移[8]。本文選擇的是彈簧鋼(65Mn),此時激振力的值可用下面公式求得[7]

式中 Y——雙晶片的楊氏模量
b——壓電雙晶片寬度由此可見,在交變電壓控制下,激振力呈正弦規律變化,給料器做受迫振動。
由式(2)可知驅動部分所受的激振力為

3.2 壓電式振動給料器驅動部分諧響應分析
諧響應分析是一種線性分析,分析結構在承受正弦(簡諧)載荷作用下穩態響應的一種技術。分析可以得到位移隨頻率變化的幅頻特性曲線,及其他結果隨頻率變化的情況。進一步分析在“峰值”響應所對應頻率下所產生的應力,從而驗證設計是否能夠成功地克服共振引起的零件破壞[9]。
在0~2 000 Hz頻率范圍內,在壓電陶瓷晶片的面上施加正弦電壓,由式(3)得到激振力。在驅動部件上加載這個載荷,平均取50個計算點,計算壓電式振動給料器驅動部分自由端隨頻率變化的位移量,得到壓電式振動給料器的幅頻特性曲線,如圖4。

圖4中橫軸表示頻率,單位為 Hz,縱軸表示振幅,單位為μm。從曲線中可以看到,當頻率在840.0 Hz時,自由端的變形量最大,達到了66 μm,此時壓電式振動給料器的驅動部分達到了共振狀態。在共振狀態下分析其應力分布,如圖5所示。從其應力分布來看,應力主要集中在約束端,但還不能達到破壞驅動器的程度。
從設計者的角度講,此壓電式振動給料器的驅動部分在一階固有頻率振動模態下,符合壓電式振動給料器的設計條件,實際中可以實現。

4 給料器固有頻率理論計算
根據給料器模型,固定式振動供料器的固有頻率計算公式為[10]
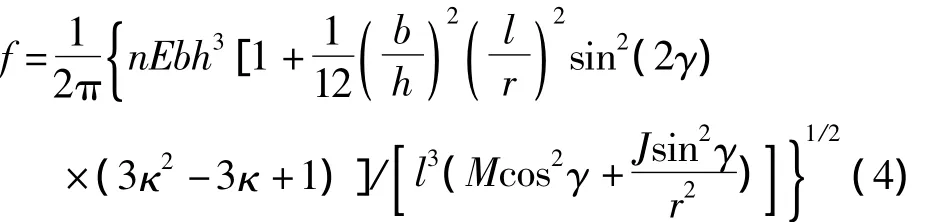
式中 n——板式彈簧組數
E——板式彈簧的彈性模量,Pa
b——板式彈簧的寬度,m
h——板式彈簧的厚度,m
γ——板式彈簧與底座的夾角,(°)
κ——修正系數
M——料斗質量,kg
l——板式彈簧長度,m
r——板式彈簧圓心距(板簧中心線到中軸之距),m
J——料斗的轉動慣量,kg·m2
料斗等效為1.2 mm厚不銹鋼板成型,質量為m=3.1 kg,轉動慣量計算如下:
已知D0=300 mm;D=297.6 mm;d=257.6 mm;δ=1.2 mm;h=80 mm
(1)料斗底盤等效體積
弧長:L=πD0=π×300
表面積:

等效體積:V1=Sδ=8.6×10-5m3
(2)料斗側壁等效體積

(3)料道等效體積(折合兩圈)

由此得出三部分的質量為
三部分對應的等效轉動慣量為[11]

所以,料斗的等效轉動慣量為
綜合前面章節的數據,式(4)中設計的各個參數歸納如下
5 結語
利用ANSYS軟件分析了壓電式振動給料器驅動部分,得到在一階振動模態下,壓電式振動給料器的驅動部件的振動頻率和計算出來的壓電式振動給料器的共振頻率存在倍頻或分頻的關系。它符合壓電式振動給料器的振動規律和工作要求,為下一步設定激振電壓頻率范圍提供參考。
1 吳文福,田忠靜等.浮動式壓電振動送料裝置.發明專利申請公開說明書,2004.
2 何承宇.壓電雙晶片執行器的研究及其在振動給料器中的應用[D]:[碩士論文].大連:大連理工大學,1999.
3 劉衛星.壓電式振動給料器的機理分析與實驗研究[D]:[碩士論文].長春:吉林大學,2006.
4 趙立冬.壓電雙晶片水平布置式送料器的設計與實驗研究[D]:[碩士論文]長春:吉林大學,2007.
5 S.B.Choi,D.H.Lee.,Modal analysis and control of a bowl parts feeder activated by piezoelectric actuators,Journal of Sound and Vibration 2004(275):452-458
6 王矜春,姜祖桐,石瑞大.壓電振動[M].北京:科學出版社,1989.
7 康東.壓電雙晶片雙向大幅振動的探討[J].礦物巖石,2003,23(3):114~116
8 Z Hu,D F Farson,G P Maul.Economic application of piezoelectric actuator in linear vibratory feeding[J].Engineering Manufacture IMechE 2006:1959-1966
9 王建江,胡仁喜,劉英林.ANSYS11.0結構與熱力學有限元分析實例指導教程[M].北京:機械工業出版社,2008.
10 林茂.料斗式電磁振動供料器的理論分析及實驗研究[J].組合機床與自動化加工技術,1994(3):31~34
11 蔣偉.機械動力學分析[M].北京:中國傳媒大學出版社,2005.
12 加藤一路,藤井隆良等.壓電驅動型送料器以及壓電元件驅動型送料器.發明專利申請公開說明書,2002.
如果您想發表對本文的看法,請將文章編號填入讀者意見調查表中的相應位置。
Mechanical Analysis of the Driven Parts of Piezoelectric Vibration Feeder
TAN Xiaodong,ZHANG Kun
(Dalian Jiaotong University,Dalian 116028,CHN)
Using ANSYS software to analyzes the driven parts of piezoelectric vibration feeder,extracted the intrinsic frequency and stress analysis,calculated the amplitude-frequency characteristic curve.Study the relationship between the spring system and resonance frequency,identify the resonance frequency range,and provide the better theory for automatic control.
Piezoelectric Vibration Feeder;Piezoelectric Vibrator;Resonance Frequency
* 遼寧省基金,基金號為:20071075
譚曉東,男,1960年生,副教授,研究方向:機器人技術和計算機測控技術,已發表13篇相關論文。
p
(收修改稿日期:2009―10―14)
10320
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
電子器件(2021年4期)2021-10-26 12:27:18
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
測控技術(2018年8期)2018-11-25 07:42:16
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
電子工業專用設備(2016年8期)2016-08-24 09:39:59
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04