平面并聯微動平臺位姿檢測系統的研究*
2010-09-29 12:17:36黃志剛劉平安
制造技術與機床 2010年3期
黃志剛 劉平安
(華東交通大學機電工程學院,江西南昌 330013)
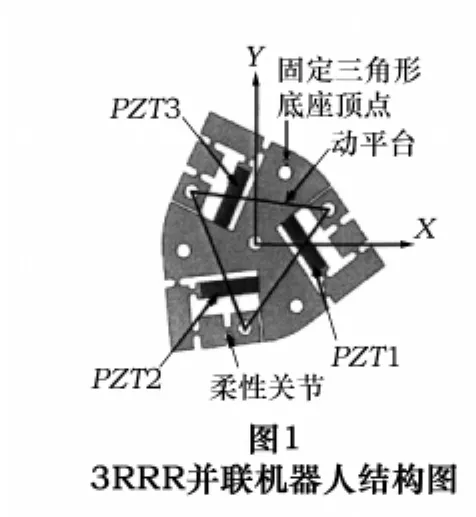
隨著微/納米技術及相關技術的迅速發展,實現精細操作的微動機器人受到人們日益關注。微動并聯機器人具有無摩擦、無間隙、響應快、結構緊湊、剛性好、誤差積累小等優點。以柔性鉸鏈代替傳統鉸鏈后并聯機構就正好具備以上特點。壓電陶瓷驅動器與并聯機構相結合構成新型壓電陶瓷驅動并聯微動機器人,正好發揮壓電陶瓷與并聯機構各自的優勢,可作為理想的多自由度精密定位平臺使用。由于壓電陶瓷固有的遲滯與蠕變等非線性特性以及幾何結構參數誤差等因素的影響,機器人的實際位姿與理論位姿存在一定的偏差。設法校正其誤差,探討有效的補償策略,提高平臺的位置姿態精度,在理論和應用上都具有現實的意義。本文以圖1所示三自由度平面并聯機器人運動平臺作為研究對象,針對此平面機構的位姿進行測量。
1 平面并聯微動平臺
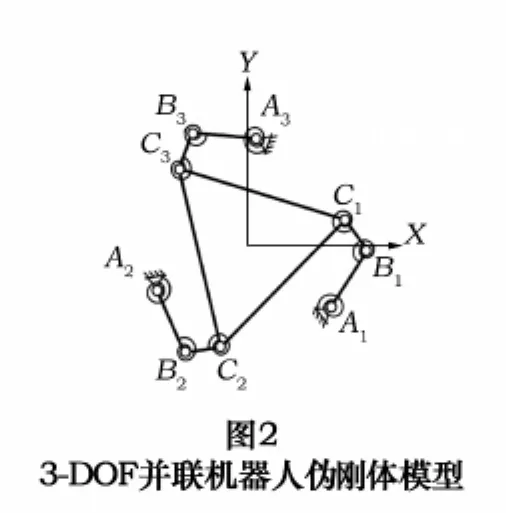
通過對整塊材料用線切割方式一次切制完成3RRR并聯機構,由于其動平臺太小且所有構件均位于同一平面內,使測試動平臺位移和姿態的探頭布置困難。因此作如下改動:動平臺不與底座共面,而由3個螺釘聯接舉起,凸出機構平面。圖1為動平臺被拆下后的情況,圖2為此并聯結構的偽剛體模型[1]。
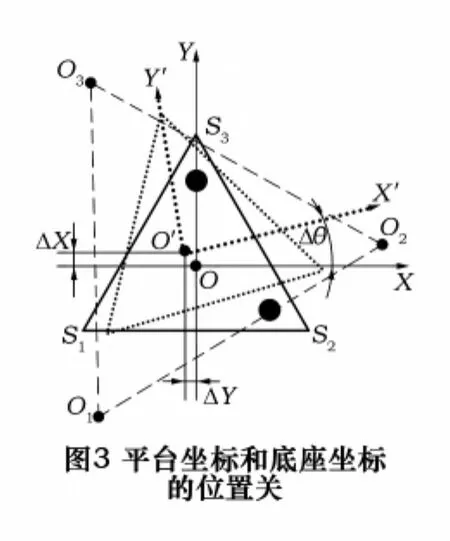
在此并聯結構中,固定底座和動平臺的支撐點都設計成正三角形分布。在初始位置時機構有最大傳動角,動力特性良好,并且這兩個三角形的幾何中心在同一Z軸上,其余兩向坐標平行。這種對稱結構有利于制造。在平臺的運動過程中,這兩個坐標系將發生分離,產生三個變化量:ΔX,ΔY,Δθ,如圖 3。
2 位姿測量裝置及測量原理
由于微機械結構及承載能力都很微小,不便于安裝用于幾何量檢測的傳感器。因此,微機械的幾何量檢測最好采用非接觸測量。非接觸測量方法一般指利用光學等測量技術方法,測量精度高,無干擾力,但易受被測環境和測量空間等具體條件的限制。我們采用計算機視覺技術中的被動式方法,即不向被測量物體發射可控制的光束,而根據直接拍攝的圖像進行距離測量的方法。由于動平臺是通過裝配關系與底座聯系起來的(圖1),隨著制造和裝配的完成,動平臺與底座的初始相對位置關系是不變的。為了測量動平臺位姿的實時變化,根據此并聯結構的特點,在動平臺上安裝兩個標準球體,作為測量動平臺位置的特征點[3]。這些特征點應滿足以下要求[4]:
①選擇特征點應結合具體情況。特征點類型應與傳感器類型、工作條件及抽取特征所用技術相適應;
②具有足夠的魯棒性。特征點的魯棒性是指該特征點在檢測過程中的可檢測性及可見長度。特征點可見范圍越大、時間越長,在物體信息中越重要;
③具有一致性。即特征點所具有的幾何信息足以確定被檢測裝置的唯一空間位姿。
安裝位置的選擇有講究,既要便于測量,又要不影響動平臺的正常工作。基于這兩方面的考慮,選擇OSi(i=1,2,3)三根線段來安排特征點。每個特征點的位置與動平臺幾何中心的距離相等,兩相鄰特征點之間的距離預先人為設定,特征點關于幾何中心對稱布置。三個特征點用固定(裝配)在微動工作臺上的3個標準直徑小球代替。圖3中用兩個相對較大的圓點表示了其中的兩個特征點。通過固定好的兩臺性能相同的攝像機(被測物體的運動不會影響攝像機)對工作臺上任意兩個標準球在三維空間的視覺進行跟蹤,檢測標準球在視野中位置和直徑的變化,判斷球心在固定坐標系的三維坐標,建立圖像空間與物空間的映射模型。同時從不同角度獲取同一景物的兩幅圖像,計算空間點在兩幅圖像中的視差(disparity),從而獲得空間點的三維坐標值,最后得到工作臺在三維空間的位姿,這就是立體視覺技術的基本原理。攝像機從任何角度拍攝標準球體,影像形狀均不變。當小球距攝像機的距離發生變化時,拍攝得到的小球圖像的直徑會隨之變化,從而可判斷小球距攝像機的垂直距離的變化,見圖4、圖5所示。xyz為世界坐標系,x1y1、x2y2分別為2攝像機的像平面,J為任意一特征點,其在底座坐標系(世界坐標系)內的坐標及其在兩像平面內所成像點的像坐標,分別以向量Pj、Pj1、Pj2表示。Pj可分別通過Pj1或Pj2的坐標變換得到。
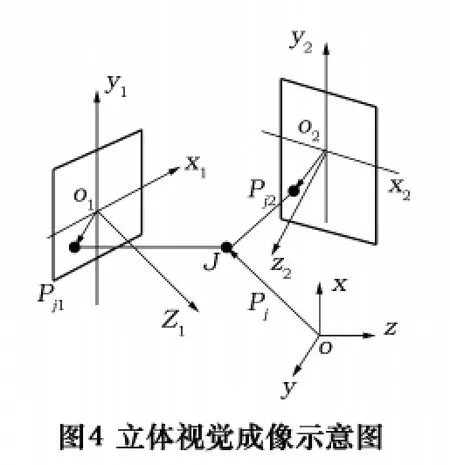

下面各式中,Pjs為特征點的初始世界坐標;Pjr為特征點在動坐標系中的位置;t為上運動平臺的位移向量;R為上運動平臺的旋轉矩陣。
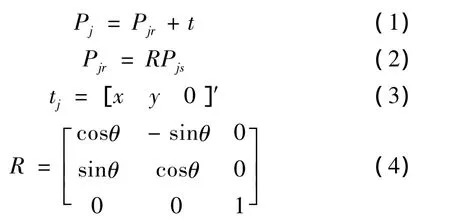
由(1)(2)式以及兩個特征點,可得到

式(6)減去式(7)得

由(8)式求得,再代入(9)計算出[x,y],最后得到平臺的位姿[x,y,θ]。
3 系統設計
我們建立的檢測三自由度平臺位姿的立體視覺檢測系統見圖6。主要包括一個微機控制的小型三自由度平臺,2個分辨率為795×596的MTV-1881EX-31/3英寸黑白低照度高解析工業攝像機;高精度、高速圖像采集卡MV-400,圖像采集分辨率可達1 024×768;Sigmatek工業PC機。2個CCD攝像機從不同角度同步獲取平臺特征點視頻信號,大部分攝像機能夠接受外部水平同步信號HSYNC和垂直同步信號VSYNC。用這種方法,圖像采集卡產生水平同步信號和垂直同步信號,并將它們提供給攝像機來進行同步鎖相。圖像采集卡預處理視頻信號后,由PCI總線直接傳入工業PC機內存,PC機負責全部圖像處理和計算工作。抓取每幀圖像需20 ms,處理一幀圖像約需50 ms,計算平臺位姿需5 ms,因此每次檢測三自由度平臺的位姿所花費的時間不超過0.145 s,保證了測量系統具有實時性的特點。立體視覺檢測系統通常包括攝像機標定、圖像采集、特征提取、立體匹配、三維重建等步驟。

4 誤差分析與相應措施
位姿測量系統的誤差主要有以下幾方面因素:(1)模型的誤差。利用透視變換矩陣的攝像機標定方法基于針孔模型,這個模型本身是對光學成像系統作了理想近似。標定過程中沒有考慮攝像機鏡頭的非線性畸變(主要是徑向和切向畸變),標定精度受到影響,不可避免引入誤差。改進辦法是用如雙平面模型等更精確的模型,或對模型加以修正;(2)器件誤差。CCD器件有制造誤差,它的讀出電路在量化和平滑時會使圖像漂移;圖像采集卡的插值處理方式也會造成新的誤差,而且這種顯示方式產生了屏幕像素和CCD像元尺寸比的標定問題。這些誤差都是受器件限制難以克服。后續工作就是要選用高精度的PSD器件作為傳感器,它作為線性分割器件分辨率高,讀出電路簡單,可直接輸出與位置信息成比例的信號,簡化了后續處理,這也是當前高精度測量系統發展的方向;(3)圖像處理的誤差。在進行二值化處理和求特征點圓心時,會產生一定的誤差。這就要求加強軟件的自適性和智能性,使之根據情況自動做出調整;(4)其他誤差。由于在本系統中涉及到攝像機的定位和姿態調整,動平臺的安裝是否在水平面內,以及特征點的布置和裝配誤差、制造誤差,都對測量結果有影響,這可以通過系統標定來減小這種負面影響。另外,環境光的影響,測試過程中人為的干擾(如碰到標定的攝像系統上)等因素都可能引起誤差,要注意避免。
5 結語
本文提出了一種新的基于立體視覺的雙目檢測微工作臺的動態位姿的系統。所用方法和原理簡單、快速、可靠、易于實現。隨著光電技術和計算機技術的發展,尤其是高分辨率CCD攝像機的出現,借助于誤差精度理論,使計算機能借助各種視覺傳感器來獲取物體的圖像,再由計算機直接對數字圖像進行處理,從而恢復物體在三維環境中的姿態結構、幾何尺寸以及相互位置等,極大地提高了測量的速度和效率。視覺的最大優點是與被觀測的對象無接觸,對觀測和被觀測者都不會產生任何損傷,十分安全可靠,這是其它感覺方式無法比擬的。因此基于視覺的非接觸的間接位姿和運動測量方法的研究具有廣闊的發展前景。
1 劉平安.柔性關節及3_DOF微動平面并聯機器人設計與分析:[博士學位論文].北京交通大學,2008(6)
2 姜春英,房立金等.一種平面運動位姿的并聯組合測量方法研究.中國機械工程,2006,17(4):362 ~367
3 王芳,李航等.基于機器視覺的微工作臺位姿三點法測量.河南科技大學學報,2008,29(3):17 ~20
4 鐘玉琢等.機器人視覺技術.北京:國防工業出版社,1994.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12