提高數控系統基準脈沖直線插補速度及精度的研究*
2010-09-29 12:17:36范希營郭永環
制造技術與機床 2010年3期
關鍵詞:方向
范希營 郭永環
(徐州師范大學機電工程學院,江蘇徐州 221116)
為提高插補精度,簡化運算程序,擴大逐點比較法的應用范圍,國內外許多學者研究了各種改進方法[1~9],為經濟型數控系統的發展做出了卓越的貢獻。但是有的成果進給速度提高了,而逐點比較法其誤差小于1個脈沖當量的誤差較大的問題沒有得到改善;有的插補精度提高了,但是算法復雜,進給速度卻降低了;也有的雖然插補精度和進給速度都得到提高,但x軸、y軸脈沖分配很不均勻,造成加工后的表面粗糙。本文提出一種新型基準脈沖插補原理,旨在解決上述問題。
1 傳統的逐點比較法存在的不足
(1)傳統的逐點比較法進給速度不夠快。用逐點比較法對直線進行插補應走的總步數較多,生產效率較低;
(2)沿X、Y坐標軸脈沖分配不均勻。造成系統平穩性差,使加工后的表面粗糙,加工質量降低;
(3)進給誤差較大。進給誤差小于一個脈沖當量,使加工精度不高。
2 新型基準脈沖插補原理
2.1 新型基準脈沖插補思想
在各種改進的基準脈沖插補方法中,較有名的就是最小偏差法和半步偏差法[8,9],但這兩種方法均以和的形式構造二次偏差判別函數,二者均是在試算兩個插補方向上的偏差之后再比較其絕對值的大小,使算法變得復雜,執行速度降低。本文所提出的新型插補算法,以差的形式構造偏差函數,將偏差計算與偏差比較合并考慮,直接遞推偏差比較結果,使算法大為簡化,插補運算速度提高一倍左右。
2.2 新型基準脈沖插補原理
2.2.1 插補原理
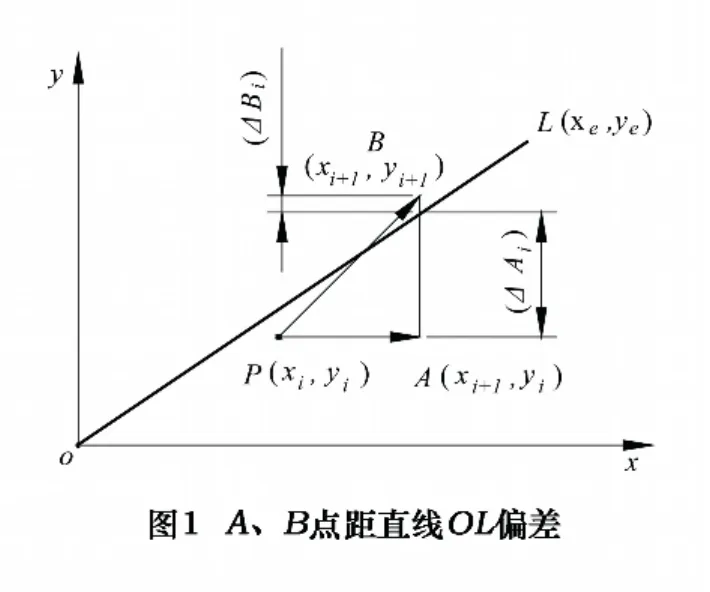
以0<α<45°區間內直線OL為例,如圖1所示,直線起點坐標為(0,0),終點坐標為(xe,ye),則可知直線方程為y=(ye/xe)x,取F=xey-yex為偏差函數 。
設當前有一插補點P(xi,yi)位于直線OL下方,xe>ye。根據速度條件可排除僅走Δx的走步方式,則第i+1步有兩個可能的插補點:Ai(xi+1,yi);Bi(xi+1,yi+1)。其中xi+1=xi+1,yi+1=yi+1。則新插補點和理想直線的偏差分別為

由于 Δ(Ai)、Δ(Bi)均大于0,顯然:
1.4療效判定標準:①顯效:患者的心功能改善超過II級,肝臟縮小2cm以上。②有效:患者的心功能改善I級,癥狀體征均緩解。③無效:患者的心功能改善不足,體征和癥狀沒有明顯變化。治療總有效率=(顯效+有效)例數/總例數×100%。
(1)若 Δ(Ai)-Δ(Bi)>0,則 Δ(Ai)>Δ(Bi),根據下一插補點距理想直線的偏差應最小的原則,此時應向B點(+Δx,+Δy)方向進給;
(2)若 Δ(Ai)-Δ(Bi)<0,則 Δ(Ai)<Δ(Bi),此時應向A點(+Δx)方向進給;
(3)若 Δ(Ai)-Δ(Bi)=0,則 Δ(Ai)=Δ(Bi),此時向A點或B點方向進給均可,本文約定向(+Δx)方向進給。
故可構造一插值偏差函數f,令

則 :當fi<0時,向(+Δx)方向進給;
當fi≥0時,向(+Δx,+Δy)方向進給。
2.2.2 偏差計算
由式(3)有:

(2)當fi≥0時,應向(+Δx,+Δy)方向進給,xi+1=xi+1,yi+1=yi+1

2.2.3 終點判別
終點判別式為插補起始狀態值與插補步數之差為零,即:Σi+1=0
起始狀態值:Σ0=xe+ye;
例如,當向(+Δx,+Δy)方向進給時,:Σi+1=Σi-2;當向(+Δx)方向進給時,Σi+1=Σi-1;
由初值式(7)起應用遞推公式(5)或(6)迭代至Σi+1=0,即完成該直線插補運算,與最小偏差法、半步偏差法相比,避免了兩個插補方向的偏差試算及絕對值大小比較,而是將其歸于一式,直接遞推偏差比較結果,每步插補僅需一次遞推計算,使算法大為簡化。


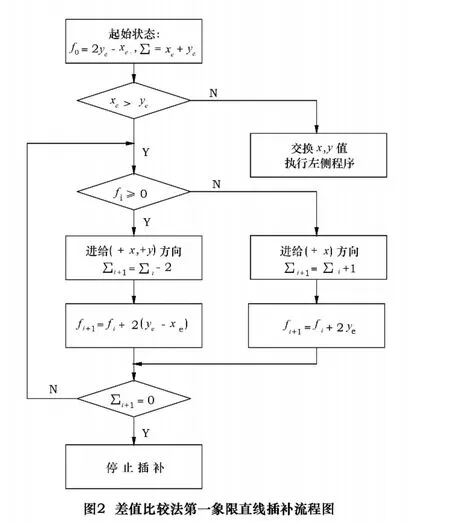
2.3 新型插補算法流程圖
新型插補算法在第一象限內插補運算流程圖如圖2所示。
3 新型基準脈沖插補軌跡及脈沖分配
3.1 新型基準脈沖插補軌跡及脈沖分配圖
例如,利用新型插補算法加工一直線OL,起點坐標為(0,0),終點坐標為(28,16),則改進前、后逐點比較法直線插補軌跡如圖3所示,改進前、后逐點比較法脈沖分配對比圖如圖4所示。
3.2 新型基準脈沖插補速度、脈沖均勻性及插補精度分析
(1)由圖3可看出,傳統逐點比較法插補了44次,而新型逐點比較法插補了28次,可見,改進后的新型插補算法使插補次數減少了16次,新型插補算法使插補速度提高30%以上。

(3)傳統的逐點比較法插補偏差為0的步數有4步,插補偏差為0.124的步數有8步,插補偏差為0.248的步數有8步,插補偏差為0.372的步數有8步,插補偏差為0.496的步數有8步,插補偏差為0.620的步數有4步,插補偏差為0.744的步數有4步;而新型插補算法插補偏差為0的步數有4步,插補偏差為0.124的步數有8步,插補偏差為0.248的步數有8步,最大插補偏差0.372也為8步,可見脈沖分配較傳統的逐點比較法均勻,且周期性變化小。
4 結語
以差的形式構造的偏差函數,將偏差計算與偏差比較合并考慮,可提高數控系統基準脈沖直線插補速度及精度。①可使插補精度提高一倍。②使插補速度提高30%以上。③使各坐標軸脈沖分配較均勻,且周期性變化小。
1 李文斌,李衛京,楊世春.一種快速實用的插補算法[J].太原理工大學學報,2004(4):431~433
2 袁超廷.數控中的最佳插補原理——最小誤差法[J].重慶建筑工程學院學報,1985(5):86~98
3 蘇秀平.細論直線的逐點比較法插補[J].機床與液壓,2004(4):119~121
4 Srinivasan V,Nackman LR.Voronoi diagram for multiplyconnected polygonal domains I:algorithm[J].IBM Journal of Research and Development 1987,31(3):361 -372
5 Lai W,Faddis T,Sorem R.Incremental algorithms for finding the offset distance and minimum passage width in a pocket machining toolpath using the Voronoi technique[J].J Mater Process Technol 2000;100(1):30-35
6 Kim K,Kim MK.Volumetric accurary analysis based on generalized geometric error model in multi axis machine tools[J].Mechanisms and Machine Theory,1991(3):P207-219
7 Dorndorf U,Kiridena VSB.Optimal budgeting of quasistatic machine tool errors[J].Journal of Engineering for Industry,1994,116(1):42-52
8 李恩林.最小偏差插補原理[J].機械設計與制造,1980(1):19~26
9 齊從謙.半步偏差法插補的原理及實踐[J].安徽工學院學報,1982(2):23~33
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50