多形態爬樓掃拖一體化機器人設計
2025-02-24 00:00:00孫含冰王玉勤楊家誠韓信邵家樂
河南科技 2025年1期

摘 要:【目的】在現代智能家居領域中,清潔機器人逐漸成為提升生活質量的關鍵設備。然而,現有的清潔設備在對樓梯和跨樓層進行清潔時仍面臨著挑戰。為了克服這些限制,設計出一款多形態爬樓掃拖一體化機器人,其能自動適應復雜的家庭和商業環境,實現高效且全面的清潔。【方法】通過分析多形態爬樓掃拖一體化機器人在樓梯上的運動方式,構建機器人三維結構模型,并利用SolidWorks軟件對三臂邊刷和拖布傳動葉片進行有限元分析。【結果】通過集成視覺識別技術、智能路徑規劃及創新重心偏移和攀爬機制,不僅能提高機器人的清潔效率,還能增強操作的便利性和安全性。通過對比結構件的等效應力和位移量,發現數值均在允許范圍內,符合設計要求,確保了機器人結構的合理性和零件強度。【結論】該設計有望推動清潔機器人技術的發展,且在市場上具有廣闊的應用潛力。
關鍵詞:多形態機器人;掃拖一體化;自動化清潔;視覺識別系統
中圖分類號:TH137.5" " "文獻標志碼:A" " 文章編號:1003-5168(2025)01-0028-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2025.01.005
Design of Multi-Form Climbing, Sweeping and Wiping Integrated
Robot
SUN Hanbing WANG Yuqin YANG Jiacheng HAN Xin SHAO Jiale
(School of Mechanical Engineering, Chaohu University, Hefei 238024, China)
Abstract:[Purposes] In the field of modern smart home, cleaning robots are gradually becoming a key factor to improve the quality of life. However, the existing cleaning equipment still faces challenges when dealing with stairs and cross-floor cleaning. In order to overcome these limitations, this paper designed a multi-form climbing, sweeping and wiping integrated robot, which can automatically adapt to the complex family and business environment and realize efficient and comprehensive cleaning. [Methods] By analyzing the movement mode of the multi-form climbing, sweeping and wiping integrated robot crawling on the stairs, the three-dimensional structure model of the robot is constructed. And the finite element analysis of three-arm side brush and mop drive blade was carried out by SolidWorks software. [Findings] By integrating visual recognition technology and intelligent path planning, and innovating the mechanism of gravity center shift and climbing, the robot not only improves the cleaning efficiency, but also enhances the convenience and safety of operation. By comparing the equivalent stress and displacement of structural parts, it was found that the values were within the allowable range and met the design requirements, which ensured the rationality of robot structure and the strength of parts.[Conclusions] This design is expected to promote the development of clean robot technology and has broad application potential in the market.
Keywords: multi-form robot; sweeping and wiping integrated; automatic cleaning; visual recognition system
收稿日期:2023-08-13
基金項目:巢湖學院大學生創新創業項目“一塵不染——多形態樓梯清潔機器人”(X202410380107);安徽省傳統專業改造提升項目“機械設計制造及其自動化專業改造提升”(2021zygzts039);安徽省虛擬仿真實驗教學項目“數控加工虛擬仿真實驗教學項目”(2021xnfzxm070)。
作者簡介:孫含冰(2005—),男,本科生,研究方向:機械制造。
通信作者:王玉勤(1985—),男,碩士,副教授,研究方向:機械系統測試與控制。
0 引言
隨著人們居住環境質量的提升,消費者對智能家居產品的接受度顯著提高,智能家居產業發展迅速,能自主清理地面的機器產品備受青睞。
常見的家用掃地機器人通常體積較小,清理區域較小,且無法爬樓,只能在預設范圍內工作,最終返回固定位置。而公共場所(如商場等大型建筑內)還采用地面清洗機,但這種機器往往較為笨重,需要人員駕駛操作,且對一些角落的清潔效果可能不盡如人意,而且其只能清掃二維平面,無法進行樓梯和跨樓層的清潔。為了實現樓梯和跨樓層清潔,已有科技人員開展一系列研究。盧桂萍等[1]采用Arduino技術設計出樓梯自適應式清潔機器人,有效解決了樓梯清潔的自動化問題,提高清潔效率和可靠性。張明坤等[2]基于目標導向技術,對掃地機器人進行優化設計,提高了掃地機器人的導航能力和清潔效率。蘇雷等[3]對樓梯清潔機器人爬樓規劃進行研究,并對機器人的爬樓路徑進行優化,從而提高清潔效率。王福鑫等[4]對樓道智能清掃機進行設計研究,通過創新設計,增強清掃機的智能化水平和操作的便利性。
為提高清理效率,并實現自動化樓梯清理,本研究設計一款集地面清理和樓梯清理于一體的多形態掃拖一體化機器人,其能根據樓層平面圖自主生成方便合理的清掃路徑,工作人員也能根據需求規劃清潔路線,指導該機器人按照規劃的路線進行清理。該機器人能自主識別污垢、異物位置及樓梯位置。在爬梯過程中,機器人內置的重心偏移裝置會防止其因重心較高而側翻。該機器人前部裝有三臂邊刷,后部裝有拖地裝置,可實現掃拖一體化,且這兩部分也能單獨運行,從而減少人工干預,提高清理的智能化程度。
1 設計思路及工作原理
1.1 整體設計思路
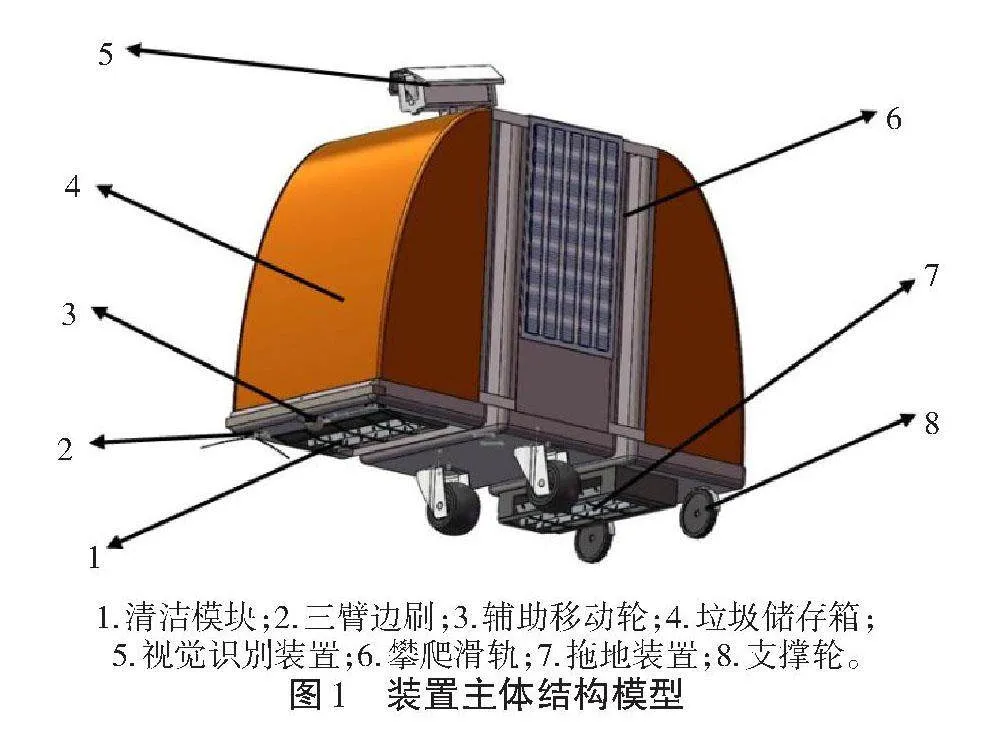
所設計的多形態爬樓掃拖一體化機器人由視覺識別裝置、清掃拖地裝置、重心偏移裝置等結構組成,裝置主體結構模型如圖1所示。多形態爬樓掃拖一體化機器人通過視覺識別裝置分析識別周邊環境的具體情況、垃圾或污垢的種類,從而規劃出更為合適的清理路徑;集成了清掃、拖地裝置,能一次性完成掃地和拖地任務,大大節省了清潔時間[5];通過重心偏移裝置并結合獨特的運動方式,使其能跨樓層清掃,極大地提高了機器的泛用性。
1.2 工作原理
多形態爬樓掃拖一體化機器人配備先進的視覺識別裝置,能邊工作邊識別周邊環境,并判斷垃圾或污垢類型[6]。將視覺識別裝置采集到的圖像數據上傳至芯片內部進行分析和判斷,使機器人能自主規劃最優的清理軌跡,提高工作效率。當遇到樓梯時,機器人采用獨特的攀爬方式,包括利用重心偏移裝置和三段式結構。機器人前部抬升后,重心移至前端,此時前部的移動輔助輪和三臂邊刷提供支撐,保持穩定。然后,機器人依次抬升中部和后部,完成攀爬。機器人將記憶此行為,并對重復場景重復攀爬路徑,實現連續攀爬樓梯。
在清理過程中,機器人將生成一張詳細的樓層圖,用于標注機器運行軌跡、無法處理的異物位置和無法清掃的位置。這種設計方便工作人員進行檢查與分析,或對無法處理的位置進行人工操作清理,保證清理的高效和徹底。
2 關鍵機構設計
2.1 清潔模塊
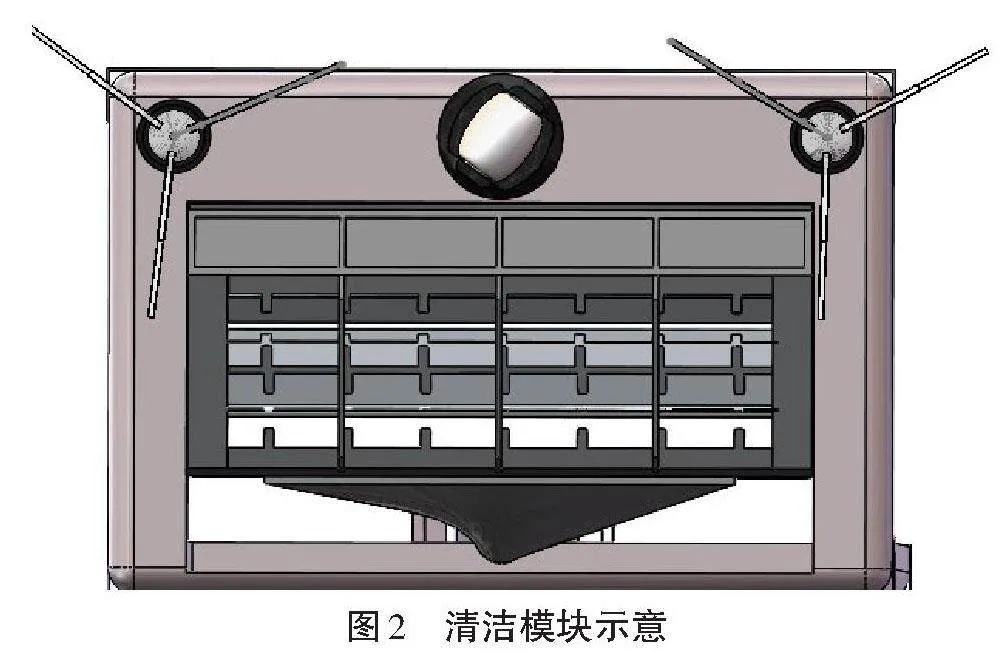
多形態爬樓掃拖一體化機器人配備了具有先進吸塵技術的清潔模塊,其由清掃和吸塵這兩個子模塊組成,如圖2所示。清掃模塊具有強大的清潔能力,前方的三臂邊刷通過高速旋轉將灰塵、毛發、污漬等雜物卷起,并吸入機器內部,甚至較大異物也能掃入儲存箱;吸塵模塊能徹底清除微小灰塵和顆粒,彌補邊刷無法將細小污漬掃進儲存箱的不足。清掃模塊與吸塵模塊相互搭配,將雜物掃至吸風口,然后由吸塵裝置吸入儲存箱,能有效清理各種污漬,提高機器的泛用性。相較于傳統的掃地機器人和掃帚,該機器人具有更卓越的清潔能力[7]。此外,該機器人配備大容量的儲存箱,能儲存更多的污垢和異物,減少頻繁清理塵盒帶來的麻煩,延長其一次作業的工作時間。
2.2 視覺識別裝置
視覺識別裝置安裝在機器人頂部,能全方位采集周圍環境信息,以便機器人快速對環境做出反應。視覺裝置與獨立芯片相結合,將識別到的圖像上傳到中央芯片中進行分析處理[8],并將處理結果通過智能系統發送至手機APP,以便工作人員及時查看機器人的工作狀態和環境。同時,深度處理后發送至機器的驅動裝置,使機器人能自主執行下一步操作,實現移動和清潔。機器人能自主識別污垢及異物的形狀、大小,判斷是否能被吸收清理。若遇到無法吸入儲存室的異物,機器人記憶后會傳遞給工作人員,并自動避讓。
機器人還能識別每節樓梯的高度,調整上升高度,確保平穩攀爬。最終,基于匯總的數據生成詳細樓層圖,包括機器人工作軌跡和無法識別或吸收的異物位置,以便工作人員指導機器。
2.3 重心偏移和攀爬裝置
機器人配備了分段式滑軌和配重滑塊的重心偏移裝置(安裝在機器內部頂部)[9]。為實現機器人爬梯功能,將機器人分為三部分,分段式滑軌也相應分為三段,每部分配備一段滑軌。當機器人遇到樓梯時,滑軌上的配重滑塊向機器人后方移動至中間,使其重心后移。隨后,最前面部分抬升到樓梯高度,以該部分為支點,抬升中間部分。接著,配重滑塊移至最前面,將重心轉移至前端,機器人隨后抬起后部。攀爬裝置與重心偏移裝置相結合,防止因重心不穩而導致機器人反轉,確保爬梯過程安全高效。攀爬完成后,機器人在樓梯上工作,并自動記憶此行為,以便在之后遇到樓梯時重復執行,實現自動化攀爬。
2.4 拖洗裝置
機器人配備清掃和拖洗裝置,真正實現了掃拖一體化[10]。拖洗裝置由水箱、清潔拖布的裝置和拖布構成。清掃裝置采用拖布環形滾動系統,將拖布分為兩部分,僅使用其中一段,另一段備用。運行一段時間后,自動切換至另一段拖布,并對前一段進行清洗。這種設計避免頻繁清理工具,只需要在清潔結束后更換水箱內的水,極大節省人力,提高清潔效率。
此外,拖洗裝置還裝配了升降裝置,在不需要拖洗的場景中升起拖洗裝置,使清掃裝置獨立運行。同樣地,對不需要清掃的場景,也可只使用拖洗裝置。這樣的設計擴大了機器的應用范圍,滿足更多清潔需求。
2.5 五輪驅動裝置
機器人搭載了五個輪子以實現移動,包括兩個驅動輪、兩個支撐輪和一個輔助輪,具有兩種運動模式[11]。一是驅動輪平行排列(標準運行模式),類似于汽車前輪,支撐輪自由旋轉,輔助輪使機器左右偏轉,用于清潔地面。二是驅動輪直線排列,即將輪子繞固定軸旋轉90°,類似于汽車同側輪排列,固定其中一個支撐輪,將其作為支點,實現機器的直角轉彎。這種模式適用于墻角或樓梯清潔時調整方向,提高轉向的便捷性。
3 主要結構件有限元分析
由于機器人需要長時間處理異物和污垢,因此,其工作件(包括清掃裝置和底盤)均由高強度合金鋼制成。此外,機器人搭配了拖洗裝置,部分零件也采用304不銹鋼。通過有限元分析對三臂邊刷和拖布傳動葉片進行檢測,確保機器材料的強度符合要求。
3.1 三臂邊刷靜力學分析
三臂邊刷是用三條高強度合金鋼制成的清掃臂,具有高硬度和優良的耐磨性、耐腐蝕性。邊刷合理均勻地排列在中心圓盤上,形成有序的布局。清掃臂由中心圓盤連接至中間工作馬達,確保工作時的穩定性。在工作過程中,機器人主要受三臂邊刷裝置施加的指向切線方向的壓力及地面對邊刷的垂直向上彈力,這對零件的硬度和耐磨性提出更高的要求。為確保機器人在極端環境下保持安全運轉的同時,還能發揮最大性能,對其進行有限元分析,對清掃臂施加一個垂直地面向下的壓力,三臂邊刷彈性模量為2.1×1011 N/m2,泊松比為0.28,張力強度為7.2×108 N/m2,屈服強度為6.2×108 N/m2,其應力云圖和位移云圖如圖3所示。
由圖3可知,對三臂邊刷施加5 N壓力,所受到的反作用力為4.8 N,等效應力的最大值為3.2×108 N/m2,小于零件的張力強度(7.2×108 N/m2),最大位移量為3.3 mm。由此可知,三臂邊刷的強度和變形量均在合理范圍內,符合設計要求。
3.2 拖布傳動葉片靜力學分析
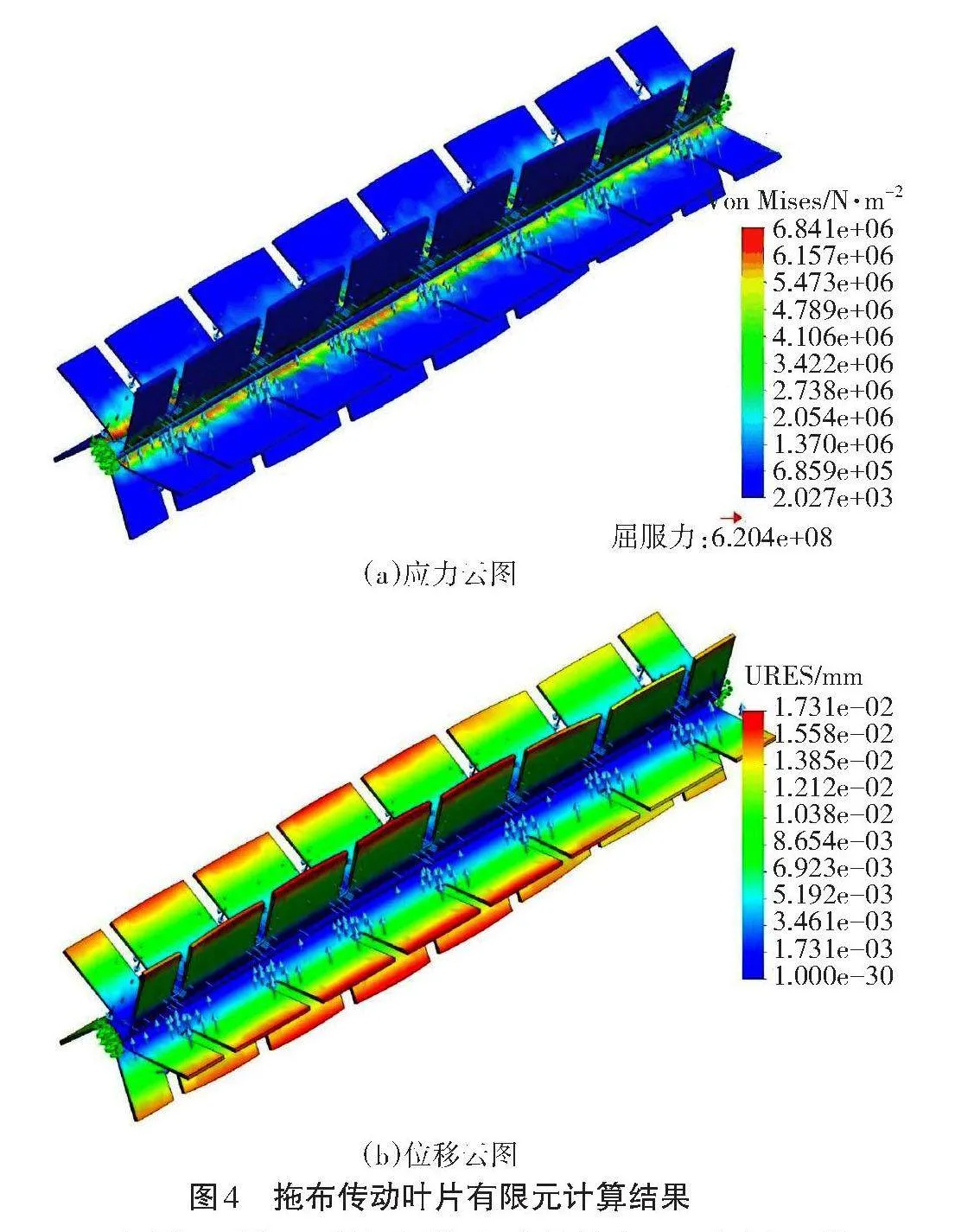
拖布傳動葉片由304不銹鋼制成,具有較強的耐腐蝕性和較高的硬度。五片相同的拖布傳動葉片均勻排列,并與水接觸,因此,提高拖布傳動葉片零件的防腐蝕性尤為重要。此外,水起到潤滑作用,所以在傳動軸表面加裝五片葉片,以增強葉片與拖布之間的摩擦力。工作時,機器受到沿葉片旋轉切線方向的拖布摩擦力,使拖布帶動傳動軸運轉。為了檢驗葉片的強度是否符合要求,對葉片進行靜力學分析,施加垂直于葉片的壓力以模擬拖布產生的摩擦力。拖布傳動葉片彈性模量為2.1×1011 N/m2,泊松比為0.28,張力強度為7.2e×108 N/m2,屈服強度為7.0×108 N/m2,其應力云圖和位移云圖如圖4所示。
由圖4可知,對拖布傳動葉片施加1 N壓力,所受到的反作用力為1.8×10-7 N,等效應力的最大值為6.8×106 N/m2,遠小于零件的張力強度(7.2×108 N/m2),最大位移量為0.017 mm。由此可知,拖布傳動葉片的強度和變形量均在合理范圍內,符合設計要求。
4 結語
本研究針對傳統清掃和拖洗方式在樓梯清掃和跨樓層清掃時的不便,設計出一款機器人,用以彌補這一缺陷。該機器人配備了清掃和拖洗裝置,并根據不同環境需求,實現清掃和拖洗裝置的獨立運行,從而實現真正的掃拖一體化。本研究為拖洗裝置設計了拖布環形滾動系統和升降裝置,進一步提高使用的便利性。此外,機器人還搭載了重心偏移裝置,確保在爬樓梯過程中重心保持在較低位置,增強安全性。
在充分考慮了機器人的各項功能后,使用SolidWorks軟件對機器人整體結構進行三維建模,并對三臂邊刷和拖布傳動葉片進行有限元分析,保障零件的強度和韌性,確保設計能滿足所有要求。因此,本研究設計的機器人不僅自動化程度高、清掃效率高,而且具備樓層清理和跨樓層清理的能力,在市場上具有廣闊的應用前景,為未來掃地機器人的發展提供技術借鑒。
參考文獻:
[1]盧桂萍,李春雷,劉卓沄,等.基于Arduino的樓梯自適應式清潔機器人設計與實現[J].機電工程技術,2023,52(1):161-165.
[2]張明坤,王成軍.基于目標導向的掃地機器人設計研究[J].齊齊哈爾大學學報(自然科學版),2019,35(1):39-42.
[3]蘇雷,張磊,邵建根,等.樓梯清潔機器人的爬樓規劃研究[J].江西師范大學學報(自然科學版),2023,47(1):77-81.
[4]王福鑫,魏楠,萬世勇,等.樓道智能清掃機設計研究[J].造紙裝備及材料,2020,49(3):124,128.
[5]廖錚,張凌浩.基于三維點云地圖的掃地機器人智能清潔設計策略研究[J].設計,2022,35(9):82-85.
[6]葉魯斌,劉皓月,張紀元,等.家居環境中的智能掃地機器人設計[J].計算機輔助設計與圖形學學報,2023,35(2):262-272.
[7]歐雪霞.基于STM32的智能掃地小車的設計與實現[J].電子制作,2021(21):27-30.
[8]湯偉,高涵,劉思洋.基于樹莓派的小型水域智能垃圾清理機器人系統設計與實現[J].科學技術與工程,2019,19(34):239-247.
[9]王義娜,劉賽男,王碩玉,等.全方位機器人的重心位置預測與軌跡跟蹤控制[J].控制理論與應用,2024,41(1):145-154.
[10]王索蔚.掃拖洗烘四合一更全能米家免洗掃拖機器人[J].計算機與網絡,2021,47(21):24-25.
[11]賈松敏,盧興陽,張祥銀,等.輪子打滑狀態下全向移動機器人軌跡跟蹤控制[J].控制與決策,2020,35(4):833-842.
