基于無人機攝影測量的邊坡變形監測研究
2024-07-26 00:00:00江吉平
科技資訊 2024年11期





摘要:邊坡監測是指導邊坡穩定性分析的重要手段之一。針對傳統航線在邊坡采集中容易造成重疊度不一致、精度較低等弊端,研究適用于規則邊坡的精細模型航線,利用該航線可以使實驗邊坡三維模型平均地面分辨率達到毫米級,能夠清晰分辨并量測邊坡上的縫隙。實驗結果表明,邊坡模型上可以直觀發現毫米級縫隙,通過在模型上幾處縫隙的測量寬度與實際測量結果對比,小于等于1mm的長度誤差占83.3%,縫隙寬度測量平均誤差為0.95mm,測量結果精度較高。DEM疊加分析可以反應坡面整體變化情況,是傳統監測方法的有利補充。
關鍵詞:無人機攝影測量邊坡變形監測縫隙量測
ResearchonSlopeDeformationMonitoringBasedonUAVPhotogrammetry
JIANGJiping
DongguanFirstBranch,GuangzhouSiweiChengkeInformationEngineeringCo.,Ltd.,Guangzhou,GuangdongProvince,523040China
Abstract:Slopemonitoringisoneoftheimportantmeanstoguideslopestabilityanalysis.Inresponsetothedrawbacksoftraditionalroutesinslopecollectionsuchasinconsistentoverlapandlowaccuracy,afinemodelroutesuitableforregularslopesisstudied.Bythisroute,theaveragegroundresolutionofthe3Dmodeloftheexperimentalslopecanreachthemillimeterlevel,andgapsontheslopecanbeclearlydistinguishedandmeasured.Experimentalresultsshowthatmillimeter-levelgapscanbeintuitivelyobservedontheslopemodel,andthatbycomparingthemeasuringwidthofseveralgapsonthemodelwithactualmeasurementresults,thelengtherroroflessthanorequalto1mmaccountsfor83.3%,andtheaverageerrorofgapwidthmeasurementis0.95mm,indicatinghighmeasurementaccuracy.DEMoverlayanalysiscanreflecttheoverallchangesoftheslopesurface,whichisabeneficialsupplementtotraditionalmonitoringmethods.
KeyWords:UAVphotogrammetry;Slope;Deformationmonitoring;Gapmeasurement
邊坡指的是巖石或土壤等在自然因素或人為作用下形成的具有一定傾斜度的坡面。我國因邊坡變形坍塌造成的事故時有發生,對人民群眾的生命安全和財產安全等存在巨大威脅[1]。從大量事故中發現,邊坡的坍塌變形與變形監測的不重視、不及時、不準確等有著必然關系,因此對自然邊坡或人工邊坡的變形監測至關重要。邊坡的坍塌并不是毫無征兆,在坍塌之前必定存在一個形變的過程。所以在發生事故前及時采取觀測措施,并對數據進行分析可以避免事故的發生或者將損失降到最低。目前主要的變形監測內容包括:沉降變形監測、傾斜監測、裂縫監測、撓度監測等。采用的監測方法主要可以分為點式監測、線式監測、面式監測三種。
點式監測主要利用傳統的水準儀、全站儀和GNSS(全球定位導航系統)技術等,傳統儀器操作簡單成本低且精度高,但外業效率低、采集量大且一些邊坡存在危險。GNSS技術可以全天持續觀測且為自動采集降低用人成本,但設備成本較高且受到布設條件限制。線式監測主要是利用分布式線狀光纖傳感器,可以實時監測且精度高、數據穩定,但成本高維護困難[2]。面式主要有近景攝影測量、三維激光掃描、CCD(電荷耦合器件)技術以及InSAR(合成孔徑雷達)技術,近景攝影測量技術外業效率高且成本較低但是數據采集容易受到地形影響,三維激光掃描儀精度高速度快但是價格昂貴,CCD技術精度高成本低但需要較高的操作水平,InSAR技術精度高且不受天氣情況約束但是成本高、技術復雜[3]。
傳統的邊坡監測方法與新型監測方法均存在一定的優缺點。本文通過探討提高航測精度的因素,研究無人機攝影測量技術在邊坡變形監測中的可行性。
1研究區域
實驗所在地位于廣東某濱海大道旁的邊坡,該區域緊鄰海邊,屬于亞熱帶季風氣候。本次實驗采集的邊坡范圍長約50m,寬約10m。邊坡位置及現場如圖1所示。
首次拍攝前在邊坡上均勻的布設29個固定標志點,標志點大小為邊長20cm的正方形。該邊坡于2010年底建設完畢,如今已度過沉降變形期,考慮到此邊坡的穩固性,在邊坡上設置可以移動的標志點以達到變形的目的,如圖2所示。
無人機采集邊坡數據時,單次外業飛行共2個架次,獲得影像450張。此次邊坡實驗共飛行16個架次,采集影像3587張。
2航線設計
該航線設計的主要目的是生成邊坡的精細模型,將模型精度與模型分辨率提高到毫米級。針對此種較規則邊坡的航線設計無須引入其他復雜算法如蟻群算法等,只需根據坡面計算出無人機的位置,設置好每個航點的拍照動作與俯仰角,飛機開始執行任務后從第一個航點開始拍照。其工作模式類似于使用GNSS移動站進行點放樣,提前導入已經計算好的坐標,尋找目標位置后執行動作即可[4]。航線計算中主要有以下幾個關鍵部分:(1)根據輸入的測區邊界坐標,將斜面投影成平面;(2)根據設置的預期模型分辨率計算出飛機與待測面的距離,根據重疊度計算航點坐標并進行邊界判斷,如果計算的航點未包含測區邊界,則測區邊緣重疊不夠需要外擴航線;(3)航線內的航點坐標為地理坐標,所以最后將計算好的平面坐標進行高斯反算成地理坐標。高斯投影屬于正形投影,對于在中央子午線周圍小距離的坐標,經過投影后基本保持不變,針對此次實驗,設計模型分辨率為1mm,航線采用的重疊度為航向重疊80%,旁向重疊為75%,每相鄰航線之間的間距約為1.6m,實驗共生成450個航點,航線軌跡如圖3所示。
3模型生成與點云處理
利用大疆智圖生成模型和點云。通過模型的質量報告可知,利用精細邊坡航線生成的模型平均地面分辨率為1.23mm/pixel,實驗設計分辨率為1mm/pixel,考慮到海邊風速較大可能影響無人機的姿態位置等,模型分辨率符合實驗預期[5]。生成的密集彩色點云正視圖和模型相似,此處放點云側視圖,如圖4所示。
受限于鏡頭畸變、影像質量及匹配誤差的影響,無人機影像匹配得到的點云粗差噪聲較多,其中包括了一些極低或極高粗差點,在進行點云數據處理前首先對點云去噪處理。對去噪后的點云進行濾波處理,點云濾波是將地面點和地物點進行分類,只剩下地面點的過程。濾波后的點云進行補洞,生成的DEM以高度顯示如圖5所示。
4邊坡變形數據觀測精度分析
影像處理結束后進行變形分析,主要通過:(1)坐標對比,以第一次拍攝的模型為基礎提取固定標志點坐標并假定為真值,從后七次模型上提取相應的坐標與之對比;(2)人為改變可移動標志角點位置,通過模型提取變化后坐標計算的距離與改變實際距離作對比;(3)通過點云濾波生成DEM,對各期DEM進行疊加分析;(4)通過模型可以清楚發現邊坡的一些縫隙,對模型縫隙量測與外業量測寬度進行對比[6]。
4.1固定和移動標志點坐標對比
第一次的模型共提取坐標29個,并以此為基礎假定是真值。在第一次模型上采集的坐標選擇合理分布的7個點作為后面幾次影像數據空三時的控制點,另22個作為檢查點進行對比。利用第一次模型上采集的坐標為控制點,避免了利用全站儀或RTK引入的像控點精度誤差。變形監測重點為相對精度,故不采用其他定位儀器采集坐標。
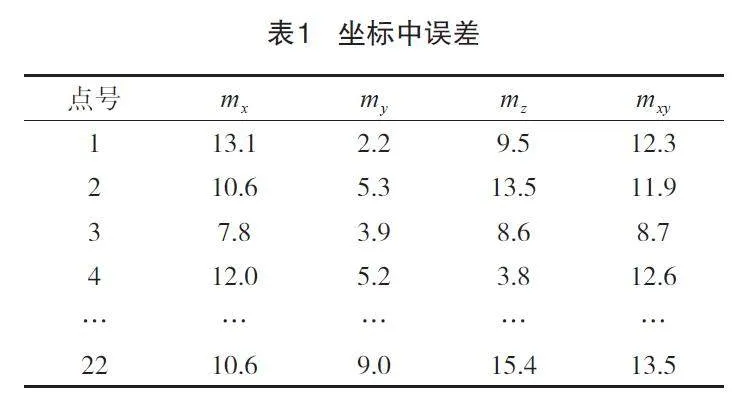
中誤差是衡量觀測精度的一種標準,也叫做均方根誤差。計算出不同檢查點多次測量的X方向、Y方向、Z方向與點位中誤差,中誤差如表1所示。
由表1可知,檢查點平均中誤差,mx=9.0mm,my=6.1mm,mz=17.3mm,平均點位中誤差mxy=10.8mm。其中在X方向上中誤差最小的為2.6mm,最大的為18.8mm;在Y方向上中誤差最小的為2.0mm,最大的為11.9mm;Z方向上中誤差最小的為3.9mm,最大的為35.7mm。由邊坡監測精度等級,四等邊坡監測點位中誤差小于12mm,高程中誤差小于2mm,此次實驗平面中誤差符合四等邊坡監測精度要求。
通過計算第6期模型平均移動距離誤差為8.2mm,第7期計算的平均移動距離誤差為6.4mm,第8期計算的平均移動距離誤差為5.9mm,3次計算的平均距離誤差為6.8mm。
4.2邊坡DEM疊加分析
將濾波后的點云進行插值補洞生成DEM,每次以第一期DEM做參考,下一期DEM作為比較對照,通過DEM疊加分析使兩期DEM法線相匹配,得到每兩期邊坡整體DEM差值直方圖。
對不同期DEM進行疊加差值分析,可以比較全面的反應出坡面變化情況,結果與坐標對比結果一致,計算出不同期變化范圍主要集中在0~15mm之間,結果具有一定可靠性。
4.3邊坡縫隙量測寬度對比
邊坡模型上可以直觀發現毫米級縫隙,通過在模型上幾處縫隙的測量寬度與實際測量結果對比,小于等于1mm的長度誤差占83.3%,縫隙寬度測量平均誤差為0.95mm,測量結果精度較高。
5結語
本文通過不同模型上固定標志點的坐標比較、縫隙量測寬度比較、改變可移動標志點模擬變形情況、對不同期邊坡DEM疊加差值四方面進行分析。提取多期模型的固定標志點坐標計算中誤差,點位中誤差為10.8mm,高程中誤差為17.3mm;縫隙量測寬度進行計算,平均誤差為0.95mm;對可移動標志點改變距離進行計算,平均誤差為6.8mm;對不同期DEM進行疊加差值,計算出不同期DEM變化范圍主要集中在0~15mm之間。邊坡模型上可以直觀發現毫米級縫隙,通過在模型上幾處縫隙的測量寬度與實際測量結果對比,小于等于1mm的長度誤差占83.3%,縫隙寬度測量平均誤差為0.95mm,測量結果精度較高。
參考文獻
[1]楊松勇.近景攝影測量技術在露天礦邊坡變形監測中的研究[D].贛州:江西理工大學,2020.
[2]費漢強,馬增,潘懿,等.基于實時動態全球定位測量的邊坡監測預警研究[J].礦業研究與開發,2023,43(7):54-59.
[3]侯健文.基于無人機攝影測量和深度學習的公路邊坡病害研究[D].太原:太原理工大學,2022.
[4]皮鶴,彭詩怡,曾憲明.基于無人機傾斜攝影測量的高速公路高邊坡監管信息提取[J].北京測繪,2023,37(4):620-624.
[5]李孟杰.基于無人機數字近景攝影測量的服役邊坡坡表變形監測技術研究[D].長沙:長沙理工大學,2023.
[6]陳小鴻.無人機航測角度對某露天礦區邊坡測量精度的影響分析[J].工程技術研究,2022,7(18):20-22.
