高速高功率密度無軸承永磁薄片電機設計與優化
2024-07-24 00:00:00李健陳紅李大偉裴同豪劉嘉韻
電機與控制學報 2024年6期
關鍵詞:優化設計
摘" 要:
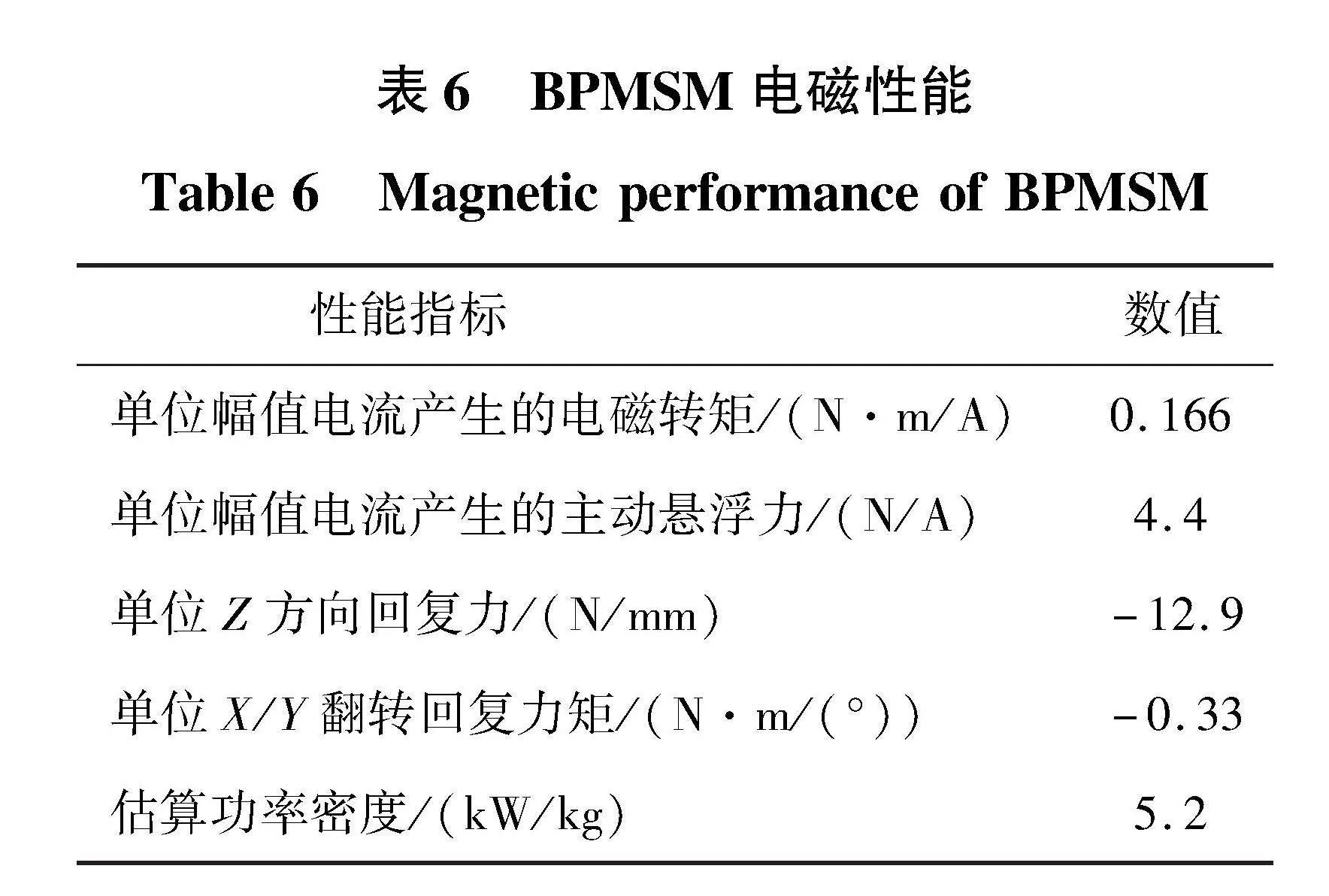
傳統無軸承電機在高速和高功率密度之間難以取得平衡,為此圍繞高速高功率密度無軸承永磁薄片電機,對其拓撲結構、繞組形式、主要尺寸等方面進行優化設計,在保證轉速和功率密度的基礎上有效地提升懸浮性能。通過對運行工況的分析,得出電機拓撲結構需具備的基本特點,提出一種采用環形集成繞組的表貼式無軸承永磁薄片電機。在兼顧轉矩和懸浮力輸出性能、機械防護可靠性的基礎上,對電機的電磁氣隙長度和永磁體參數等主要尺寸進行優化設計。針對電機飽和、繞組端部伸出等不利因素,分別采取了超前角弱磁、定子略長的性能提升策略,有效地避免了懸浮力的大幅度跌落。搭建20 000 r/min的無軸承永磁薄片電機有限元仿真模型并制造實物樣機。通過對電磁轉矩和主、被動懸浮力的分析,證明了本文設計的無軸承永磁薄片電機兼具良好的轉矩與懸浮力輸出性能,單位幅值電流產生的電磁轉矩、主動懸浮力分別為0.166 N·m、4.4 N,電機輸出功率10 kW、功率密度5.2 kW/kg。
關鍵詞:無軸承永磁薄片電機;高速高功率密度;環形繞組;優化設計;弱磁控制;端部效應
DOI:10.15938/j.emc.2024.06.017
中圖分類號:TM32
文獻標志碼:A
文章編號:1007-449X(2024)06-0171-10
收稿日期: 2022-10-19
基金項目:山東省自然科學基金(ZR2020QE218)
作者簡介:李" 健(1999—),男,碩士研究生,研究方向為無軸承永磁電機設計;
陳" 紅(1991—),女,博士,講師,研究方向為永磁電機設計;
李大偉(1989—),男,博士,教授,博士生導師,研究方向為特種電機設計;
裴同豪(1995—),男,博士研究生,研究方向為無軸承永磁電機設計;
劉嘉韻(1997—),男,博士研究生,研究方向為無軸承電機控制。
通信作者:陳" 紅
Design and optimization of bearingless permanent magnet slice motors for high speed and high power density applications
LI Jian1,2,nbsp; CHEN Hong1," LI Dawei2," PEI Tonghao2," LIU Jiayun2
(1.College of Electrical Engineering and Automation, Shandong University of Science and Technology, Qingdao 266590, China;
2.School of Electrical and Electronic Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
Abstract:
Focusing on the design of bearingless permanent magnet slice motors for high speed and high power density applications, the topology, winding structure, main dimensions, control method and process scheme were optimized. Through the analysis of working conditions, the features of the topology can be concluded. As a result, a surface-mounted type bearingless permanent magnet slice motor with dual-three phase toroidal combined windings was proposed. Taking both the torque and suspension force into consideration, the ratio of the internal and external diameter, the length of magnetic gap and the parameters of the permanent magnets were optimized. Besides, to avoid the decrease of suspension force due to saturation and end-winding effect, the control method leading-angle field-weakening was adopted as well as making the stator slightly longer than the rotor. The finite element analysis model and the experimental prototype were set up to evaluate the torque and suspension force performance. It is proved that the proposed model is able to produce the needed torque and suspension force with good performance.
Keywords:bearingless permanent magnet slice motor; high speed and high power density; toroidal winding; optimization; field-weakening control; end-winding effect
0" 引" 言
隨著新興制造業、新能源汽車和航空電氣化的快速發展,對高速、高集成度電機系統的需求日益增加,其性能優劣甚至可能成為行業發展的“卡脖子”問題。當前,絕大部分高速電機仍采用機械軸承支撐,其在高速工況下運行時的摩擦嚴重,導致電機溫升增加、損耗增大等一系列問題。為了解決上述問題,氣浮軸承、磁懸浮軸承等技術被相繼提出,但受氣體密封工藝和工作環境的約束,后者會使電機的軸向長度增加,導致系統的集成度和電機的最高轉速上限降低。因此,無軸承電機作為一種電機與磁懸浮軸承融合的想法被提出,具有無摩擦、純凈度高等優點,尤其適用于航空航天和醫藥化工等高精尖領域[1-3]。作為一種高集成度的無軸承電機,無軸承永磁薄片電機(bearingless permanent magnet slice motor, BPMSM)推動了該領域本體結構和控制方法的進一步簡化,同時順應了電機系統高速化、高功率密度的發展趨勢,具有良好的應用前景[4]。
目前針對BPMSM的研究,也主要圍繞高速化和高功率密度兩個角度展開。文獻[5]提出了一種采用環形繞組的無槽定子結構的BPMSM拓撲,有效地降低了高速運行時電機的鐵損耗,實驗驗證其能夠運行于20 000 r/min的高速工況。文獻[6-7]通過縮小電機尺寸、采用碳纖維熱套防護等措施,將該類BPMSM拓撲的轉速分別提升至了115 000 r/min和150 000 r/min。文獻[8]提出了一種轉子外徑僅有4 mm的微型BPMSM拓撲,并通過克服逆變電路功率器件的限制,將電機的轉速上限提升至了760 000 r/min。但是,上述結構的轉矩輸出能力較弱,系統功率等級較低。為了提升BPMSM的功率密度,文獻[9-10]提出了一種L型定子齒結構。該結構中,繞組纏繞于定子齒部且其軸線平行于轉子鐵心軸線,可以充分利用軸向磁路提升電磁負荷。文獻[11-12]提出了一種采用輔助齒的游標式BPMSM拓撲,該結構引入了磁場調制效應,利用其多工作磁場諧波的特性能夠提高電機的輸出轉矩。文獻[13-14]提出了一種寬氣隙定子分段結構的BPMSM拓撲,其最大輸出轉矩和懸浮力分別能夠達到20 N·m和160 N。但是,上述結構的轉速受到比較大的限制,基本上運行于1 000 r/min的轉速等級。
因此,設計同時滿足高速、高功率密度的BPMSM是一種耦合度較高的復雜問題,關于該方面的研究較少。本文圍繞高速高功率密度無軸承永磁薄片電機的設計,針對拓撲結構、繞組設計、主要尺寸等方面進行優化,提出一種采用環形集成繞組的表貼式BPMSM。首先分析電機的應用場景,確定電機拓撲結構的基本特點;其次對電機的電磁氣隙長度、永磁體極弧系數和厚度等主要尺寸進行優化設計;然后針對電樞反應引起的飽和效應導致懸浮力下降的問題,采取超前角弱磁的策略并對該角度進行優化,同時考慮薄片式結構對繞組端部伸出較為敏感的現象采取定子略長的加工方案;最后搭建20 000 r/min的無軸承永磁薄片電機有限元仿真模型并制造實物樣機。通過對電磁轉矩和主、被動懸浮力的分析,證明本文設計的無軸承永磁薄片電機兼具良好的轉矩與懸浮力輸出性能。
1" BPMSM工作原理
在同時通入轉矩電流成分和懸浮電流成分的工況下,BPMSM能夠同時產生轉矩與懸浮力,其轉矩的產生原理與普通永磁電機相同。根據經典電機設計公式,電機轉矩和主要設計參數之間的關系為
T=BmATVR。(1)
式中:Bm,AT分別為磁負荷和轉矩繞組電負荷;VR為轉子體積。
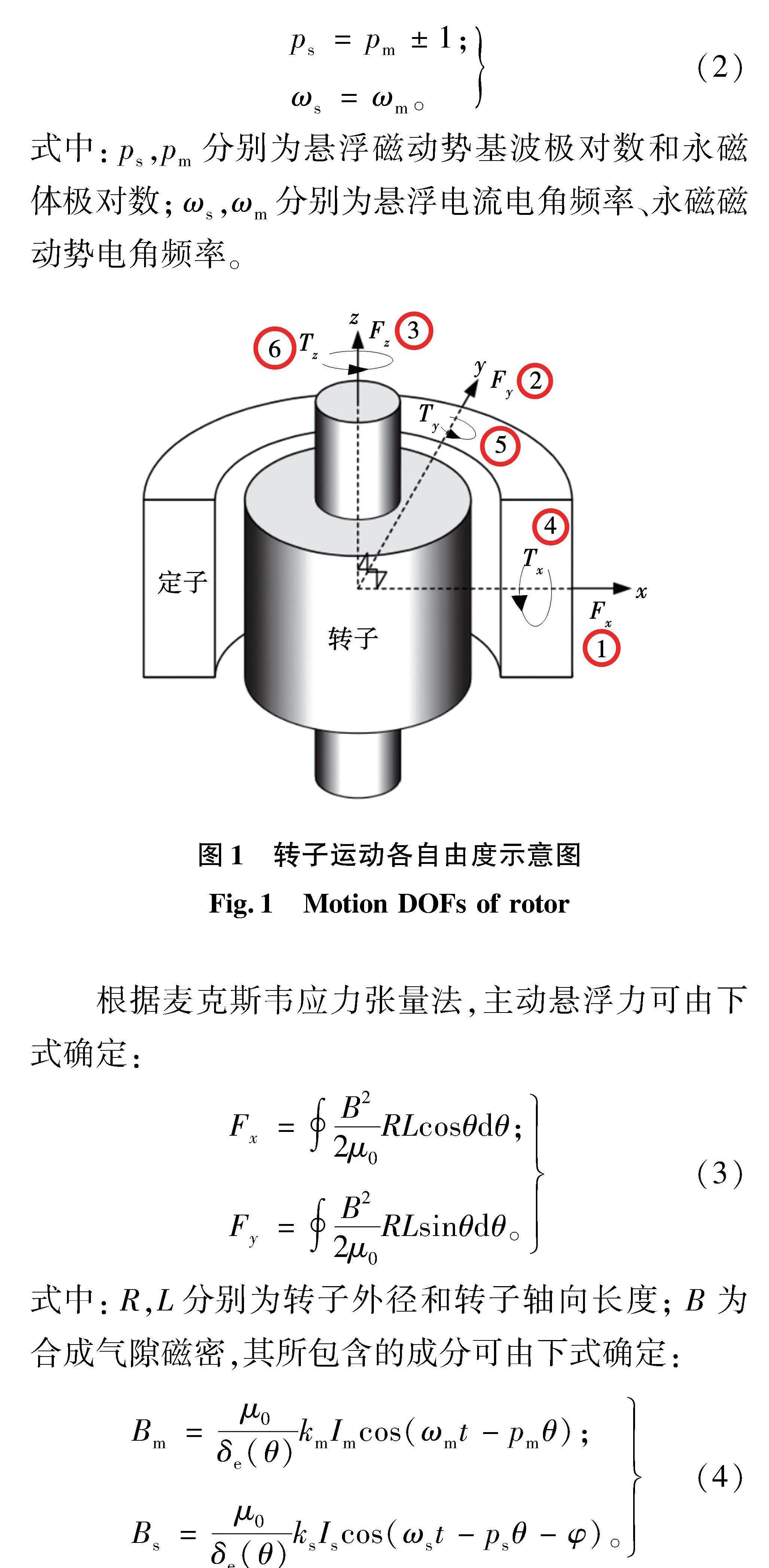
另一方面,無軸承電機區別于傳統電機的最大特點是其除了控制轉子z軸旋轉自由度從而控制轉矩輸出外,還需要平衡如圖1所示的其他五個自由度,包括沿 x、y、z 軸的平移自由度以及繞 x、y 軸的翻轉自由度。本文所研究的BPMSM在圖中1、2兩個自由度上能夠實現主動懸浮,在3、4、5三個自由度上能夠實現被動懸浮。
1.1" 主動懸浮原理
BPMSM的主動懸浮是在繞組中增加懸浮電流成分,由其產生的磁場與原有磁場相互作用從而產生圖1中1、2兩個自由度上的主動懸浮力,大小和方向由懸浮電流的大小和相位決定。恒定主動懸浮力的產生條件[15]為:
ps=pm±1;
ωs=ωm。(2)
式中:ps,pm分別為懸浮磁動勢基波極對數和永磁體極對數;ωs,ωm分別為懸浮電流電角頻率、永磁磁動勢電角頻率。
根據麥克斯韋應力張量法,主動懸浮力可由下式確定:
Fx=∮B22μ0RLcosθdθ;
Fy=∮B22μ0RLsinθdθ。(3)
式中:R,L分別為轉子外徑和轉子軸向長度;B為合成氣隙磁密,其所包含的成分可由下式確定:
Bm=μ0δe(θ)kmImcos(ωmt-pmθ);
Bs=μ0δe(θ)ksIscos(ωst-psθ-φ)。(4)
式中:δe為電磁氣隙,其可能隨轉子位置而變化;km、ks分別為永磁磁動勢常系數和懸浮磁動勢常系數;Im、Is分別為等效勵磁電流和懸浮電流幅值;φ為懸浮電流初始相位。
1.2" 被動懸浮原理
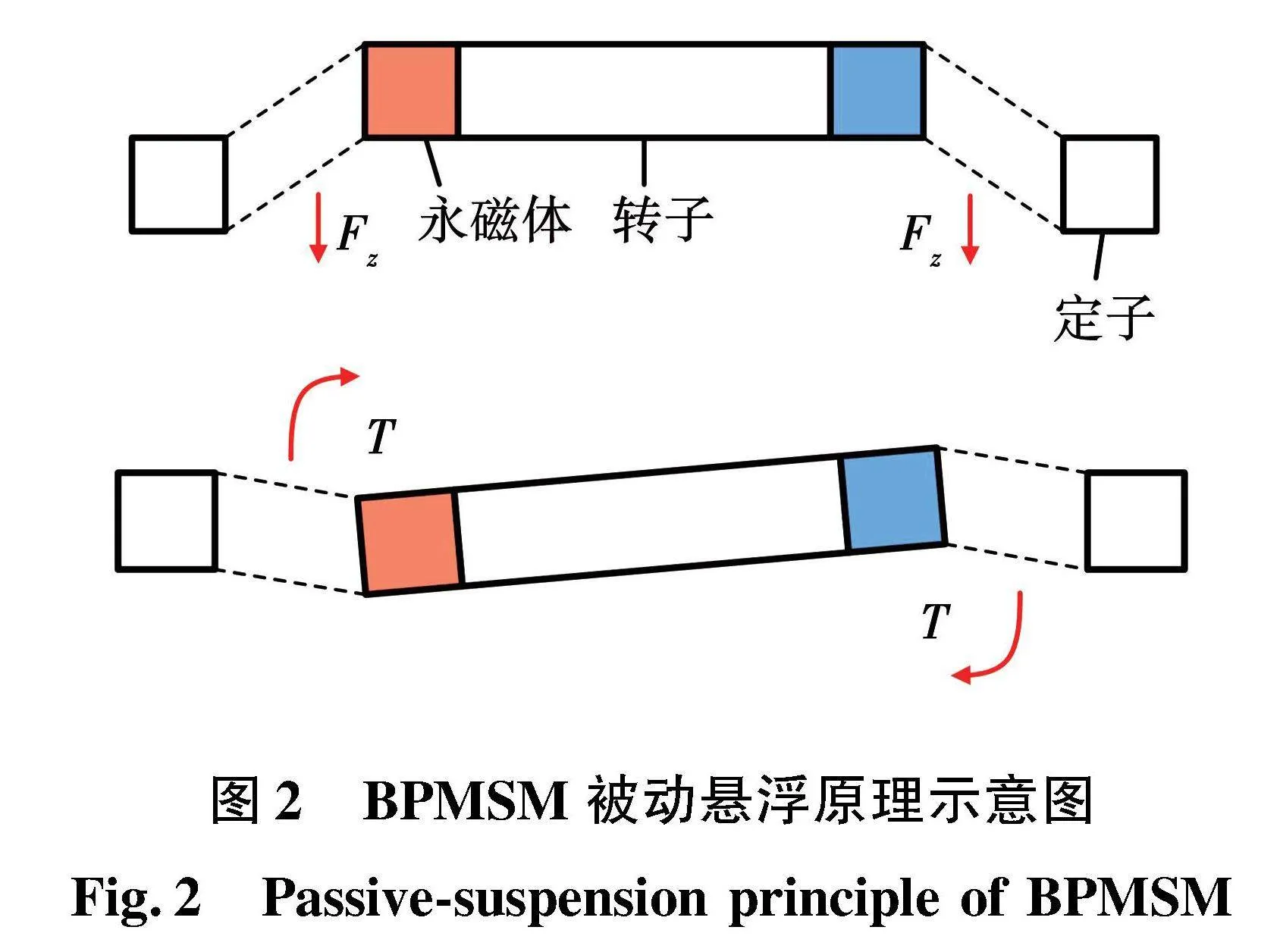
BPMSM的被動懸浮是依靠磁阻力產生圖1中3、4、5三個自由度上的回復力或回復力矩[16],這是其轉子長徑比較小的特點帶來的優勢。回復力(矩)的大小由轉子電磁結構和各自由度運動量決定,方向與各自由度運動方向相反,如圖2所示。
2" 拓撲設計與參數優化
2.1" 拓撲構造
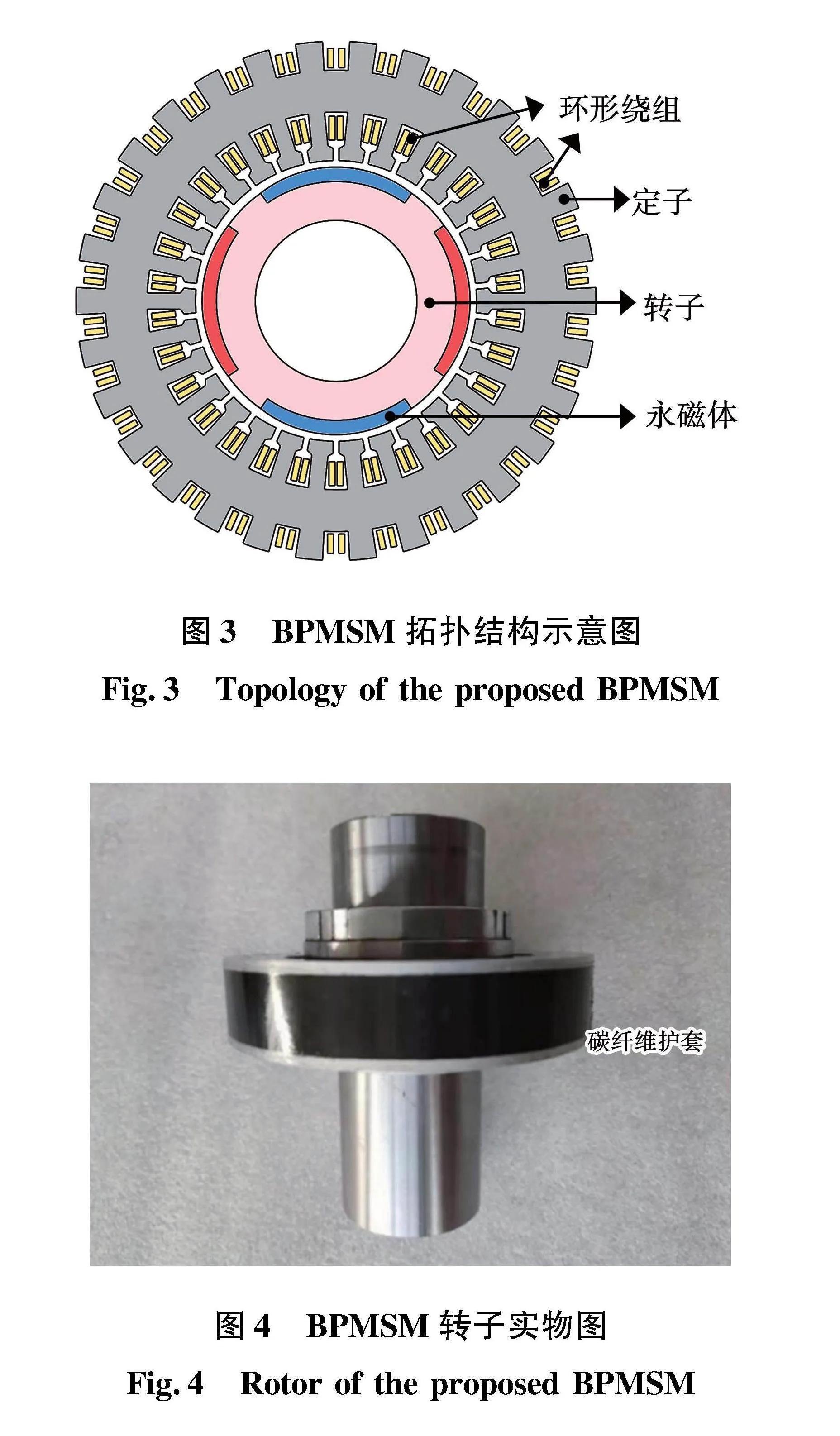
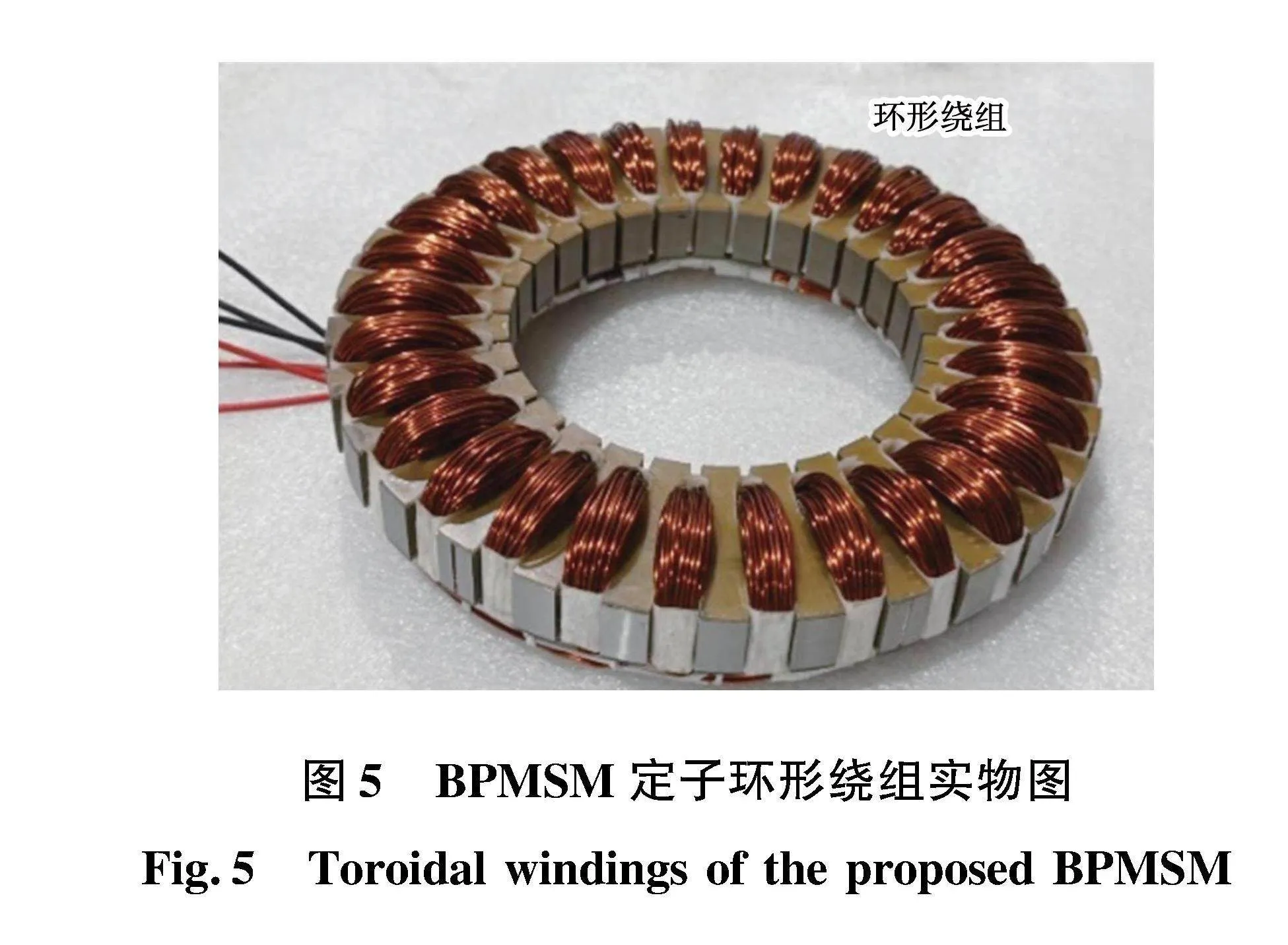
本文提出的BPMSM拓撲如圖3所示。轉子永磁體采用表貼式結構,通過碳纖維護套保證高速運行可靠性,如圖4所示。定子繞組采用環形結構,如圖5所示,其充分利用了BPMSM長徑比小的特點減輕繞組端部的重量、減小銅損耗從而提升功率密度。
2.2" 繞組設計
傳統無軸承電機采用兩套繞組結構,轉矩繞組與懸浮繞組共用一個槽。因此,轉矩的輸出能力會受到槽面積分配的限制[17-18]。同時,還會導致電機銅損耗增加、繞線工藝復雜等一系列問題。
為避免上述問題,本文僅采用一套集成繞組同時通入兩種電流成分,實現轉矩和主動懸浮力的輸出,其連接方式如圖6所示。
上圖中,繞組采用雙三相結構形式,并聯支路數為2,各線圈組ua-wb中通入的電流情況為:
iu=itu+isu;
i′u=itu-isu;
iv=itv+isv;
i′v=itv-isv;
iw=itw+isw;
i′w=itw-isw。(5)
式中:itu~itw為各相繞組通入的轉矩電流成分;isu~isw為各相繞組通入的懸浮電流成分。
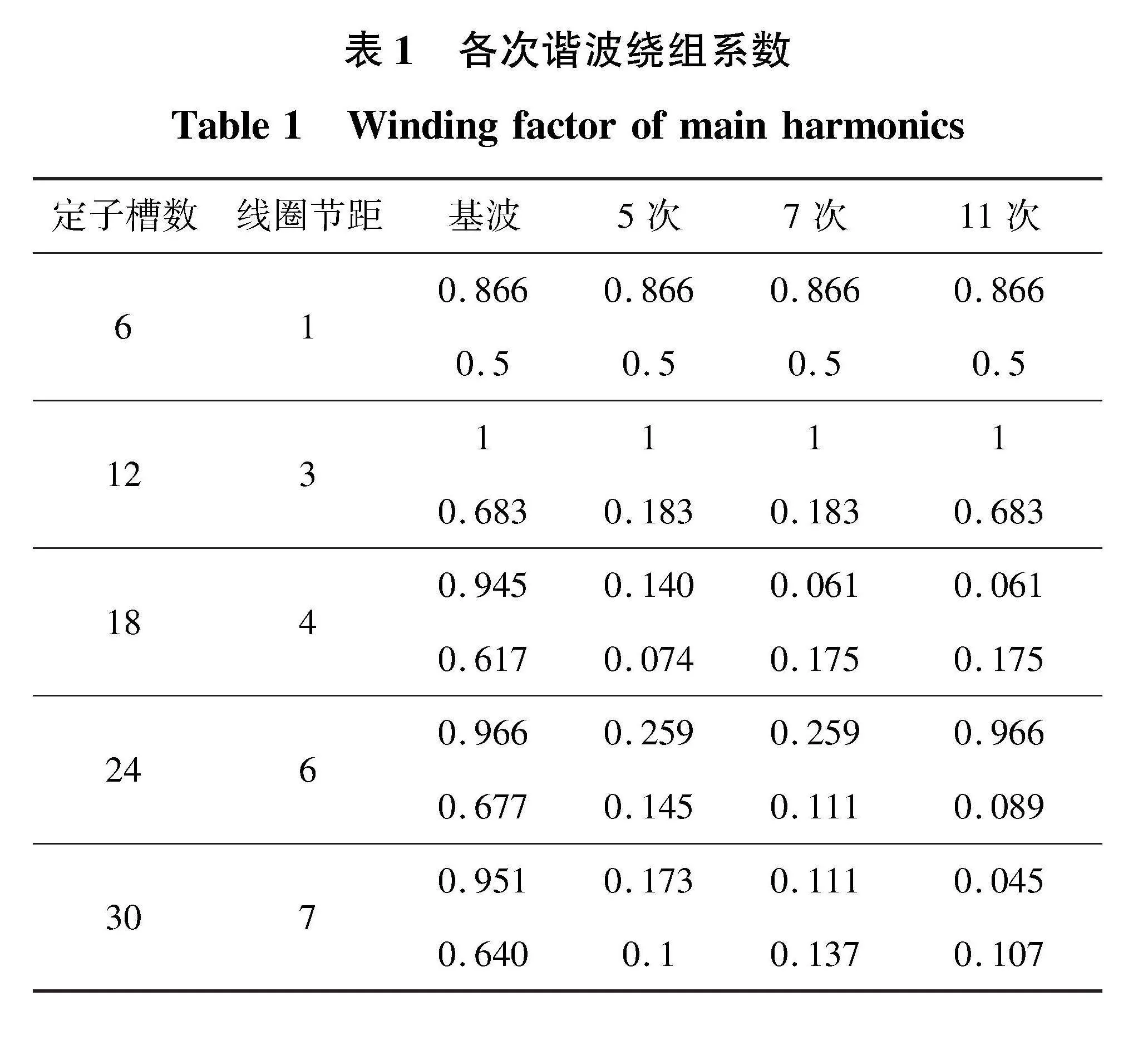
接著需要選取一種較優的極槽配合,使得集成繞組的轉矩、懸浮基波系數盡可能地高,低次諧波系數盡可能地低[19-20]。本文選取轉子永磁體極對數為2,懸浮基波極對數為1。在合理的槽數范圍內,對繞組系數進行了分析,如表1所示。表中單元格上層為轉矩系數、下層為懸浮系數。
由該表得出,采用分數槽分布式繞法,即定子槽數為18槽或30槽時,最符合極槽配合選取的目標。本文以基波繞組系數為主,選取定子槽數為30。
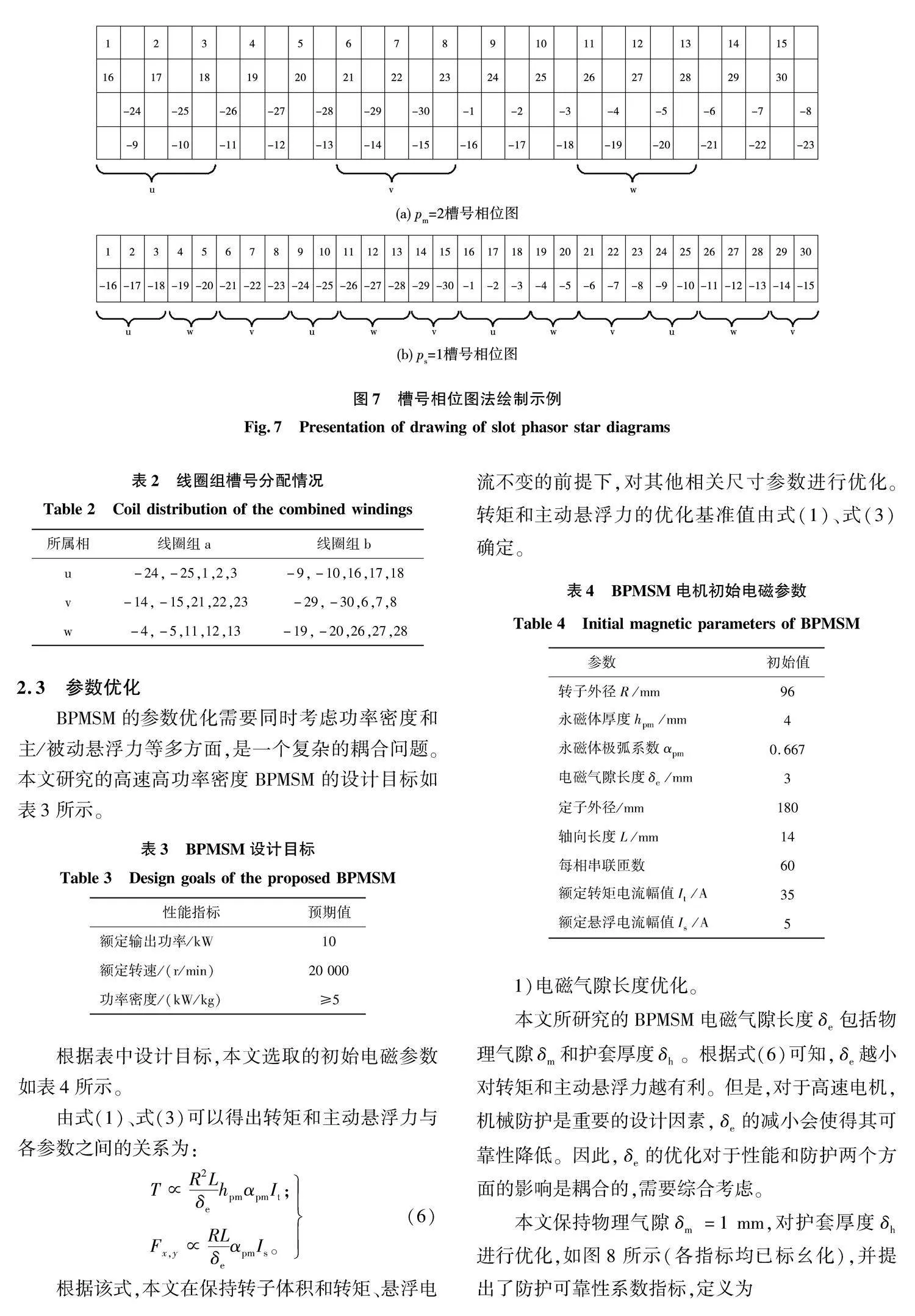
最后,需要確定各線圈組所包含的槽號,即確定各線圈組轉矩電流和懸浮電流的相位。本文提出了一種基于槽號相位圖法的設計思路,該方法僅需繪制pm=2、ps=1對應的兩張槽號相位圖,避免了槽數較多時槽矢量星形圖存在的繪制復雜等問題。此外,該方法具備更好的可編程性,能夠實現快速自動化設計。具體過程如下:
首先,計算pm=2對應的槽號相位圖的基本參數[21-22]。其橫行數為2pm=4,每一橫行所跨為360°電角度;每一橫行所含小格數為30;相鄰槽號在圖中的位移小格數為2;同一槽號正負兩格之間相差為180°電角度。繪制對應的槽號相位圖并進行三相分相,如圖7(a)所示。
其次,計算ps=1對應的槽號相位圖的基本參數。其橫行數變為2ps=2;每一橫行所含小格數仍為30;相鄰槽號在圖中的位移格數變為1。繪制對應的槽號相位圖,按照上述分相結果進行標注,如圖7(b)所示。
然后,選定u相反向的線圈為:-24,-25,1,2,3。v相滯后u相120°電角度(即圖中左移10格),其反向的線圈為:-14,-15,21,22,23。w相即對應圖中右移10格,其反向的線圈為:-4,-5,11,12,13。最終的槽號分配結果如表2所示。
2.3" 參數優化
BPMSM的參數優化需要同時考慮功率密度和主/被動懸浮力等多方面,是一個復雜的耦合問題。本文研究的高速高功率密度BPMSM的設計目標如表3所示。
根據表中設計目標,本文選取的初始電磁參數如表4所示。
由式(1)、式(3)可以得出轉矩和主動懸浮力與各參數之間的關系為:
T∝R2LδehpmαpmIt;
Fx,y∝RLδeαpmIs。(6)
根據該式,本文在保持轉子體積和轉矩、懸浮電流不變的前提下,對其他相關尺寸參數進行優化。轉矩和主動懸浮力的優化基準值由式(1)、式(3)確定。
1)電磁氣隙長度優化。
本文所研究的BPMSM電磁氣隙長度δe包括物理氣隙δm和護套厚度δh。根據式(6)可知,δe越小對轉矩和主動懸浮力越有利。但是,對于高速電機,機械防護是重要的設計因素,δe的減小會使得其可靠性降低。因此,δe的優化對于性能和防護兩個方面的影響是耦合的,需要綜合考慮。
本文保持物理氣隙δm=1 mm,對護套厚度δh進行優化,如圖8所示(各指標均已標幺化),并提出了防護可靠性系數指標,定義為
c=FHδ′hδhB。(7)
式中:FH為護套所受環向總應力的基準值;δhB、δ′h分別為護套厚度的基準值和實際值。
圖8驗證了推斷:隨δh增大,轉矩和主動懸浮力下降而防護可靠性增強。綜合考慮,本文δh的選擇值如圖中所標示。特別地,主動懸浮力在圖中a點處并未按預期呈下降趨勢,其原因是定子鐵心飽和程度的下降。因此,飽和對主動懸浮力的影響可能大于尺寸參數對其的影響,是值得關注的問題。
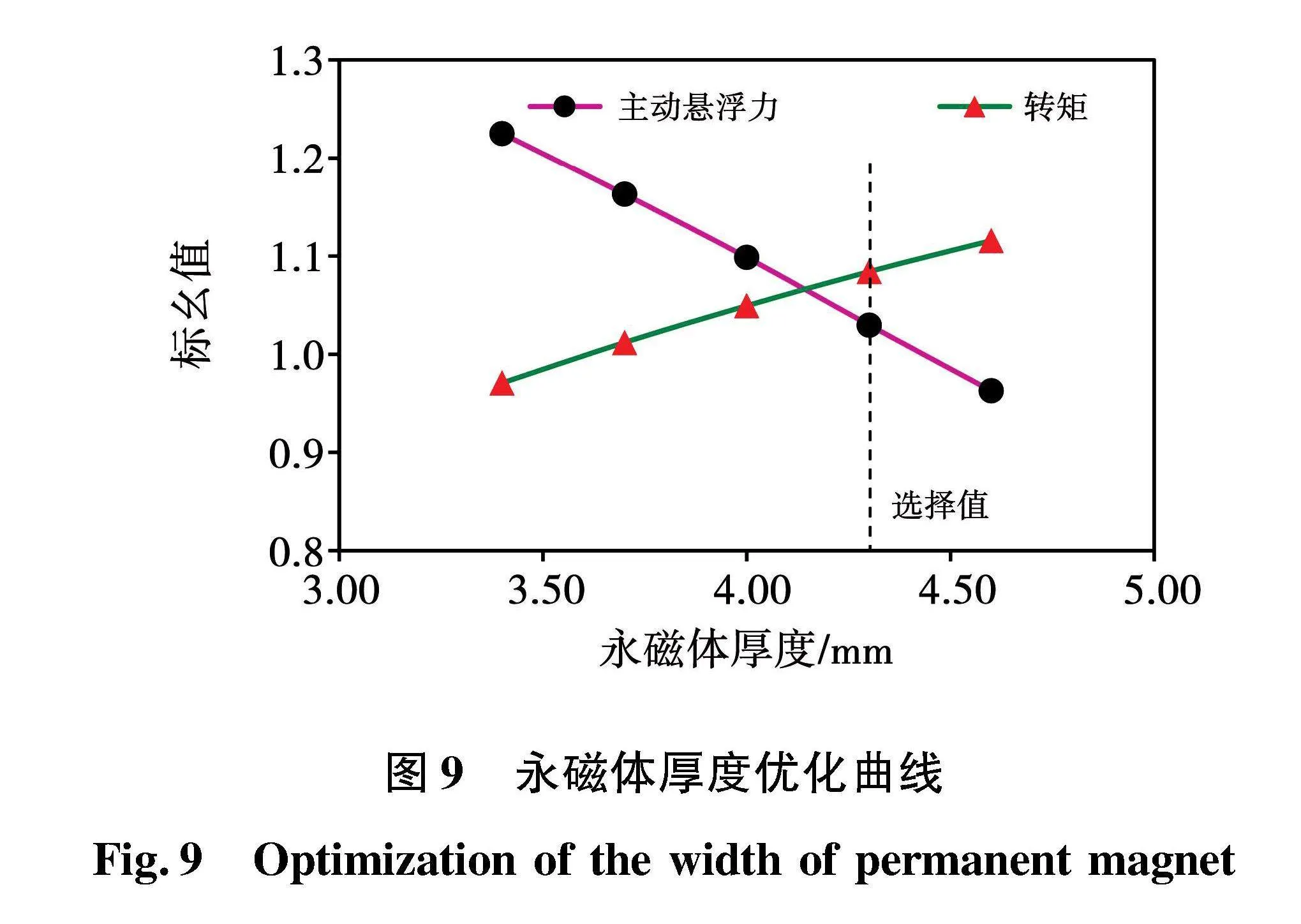
2)永磁體厚度優化。
根據式(6)可知,永磁體厚度hpm越大對轉矩越有利。但是,永磁體作為氣隙磁路的一部分,hpm的增大可能會導致主動懸浮力下降。本文對hpm進行了優化,如圖9所示。
圖9驗證了推斷:隨hpm增大,轉矩增大而主動懸浮力下降,幾乎呈線性變化。本文以功率密度為首要因素,選擇值如圖中所示。
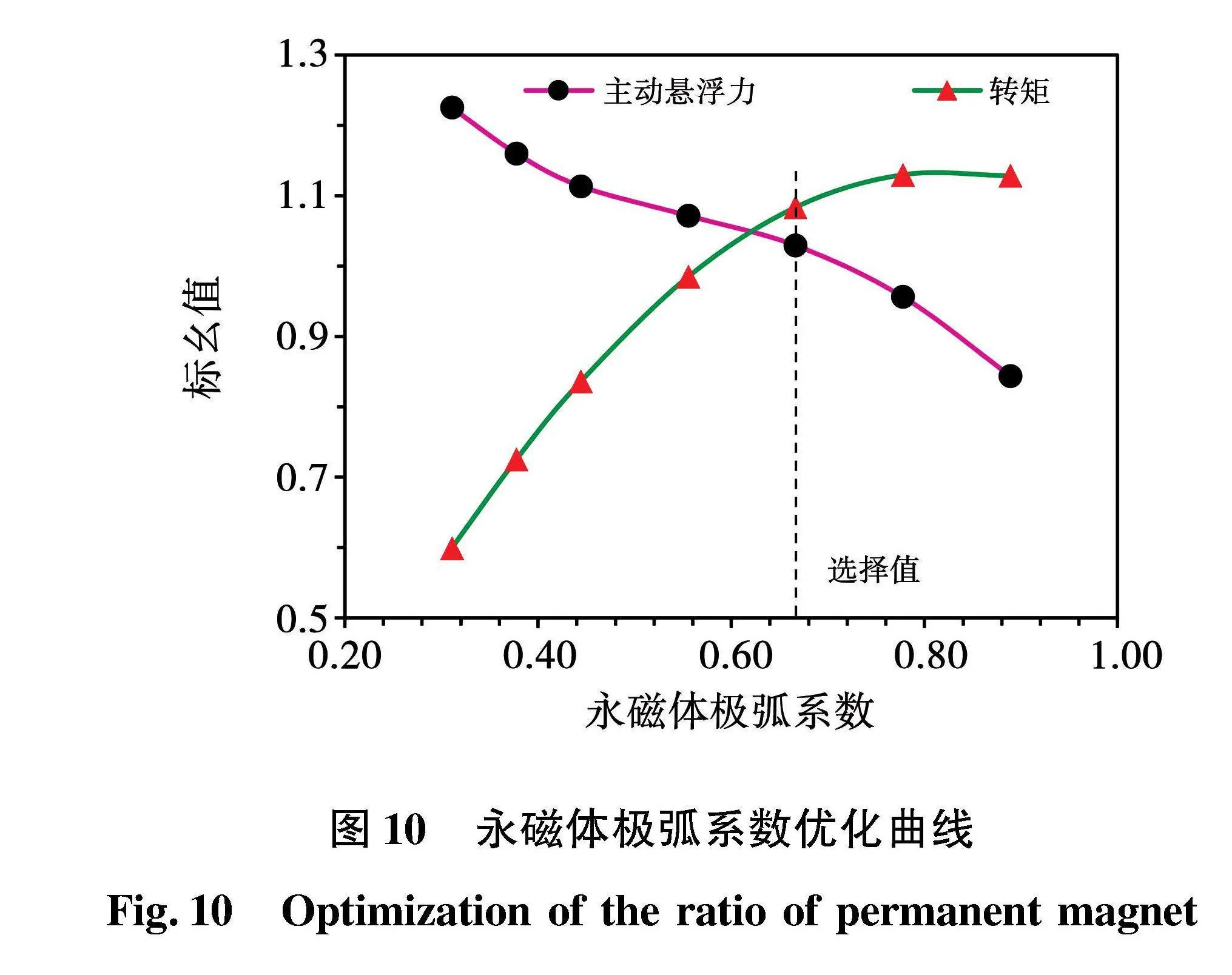
3)永磁體極弧系數優化。
根據式(6)可知,永磁體極弧系數αpm越大對轉矩和主動懸浮力越有利。但是,在極弧系數增大的同時可能會導致飽和程度增加,帶來負面的影響。本文對αpm進行了優化,如圖10所示。
圖10驗證了推斷:隨αpm增大,轉矩增大。但是,主動懸浮力卻隨αpm的增大而減小。綜合考慮轉矩和主動懸浮力,本文選擇值如圖所示。特別地,在選擇值以后,主動懸浮力下降速率加快,其原因是飽和程度的增加。
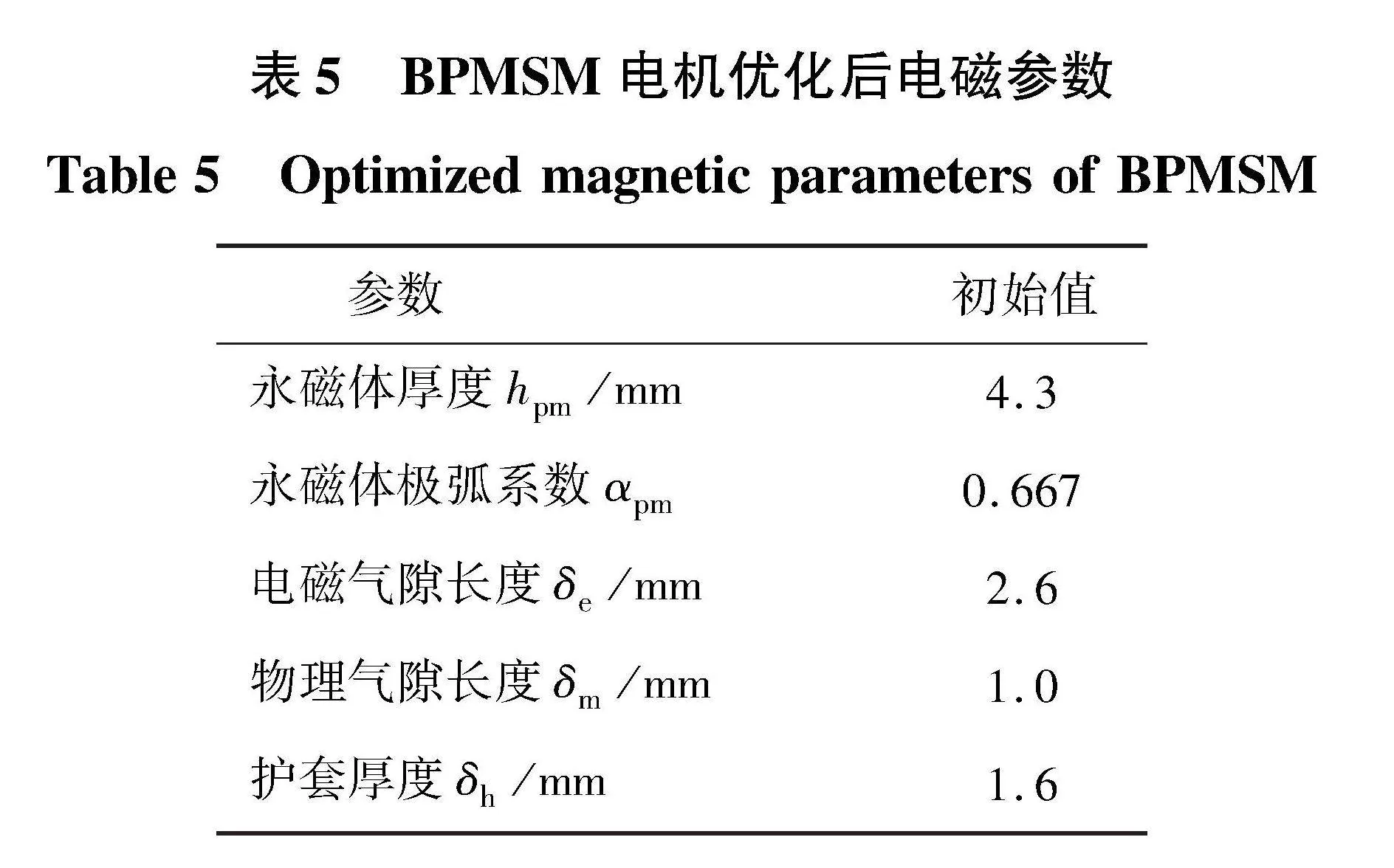
綜上所述,對于本文研究的高速高功率密度BPMSM而言,參數優化的過程伴隨著轉矩、主動懸浮力、機械防護可靠性等因素之間的耦合,需要綜合衡量。此外,飽和對主動懸浮力的影響不可被忽略。通過優化后更新的主要尺寸參數如表5所示。
3" 性能提升策略
3.1" 降低飽和程度
上述優化是基于Id=0的前提進行的,其引起的飽和現象對主動懸浮力的負面影響明顯,需要采取措施進行抑制。
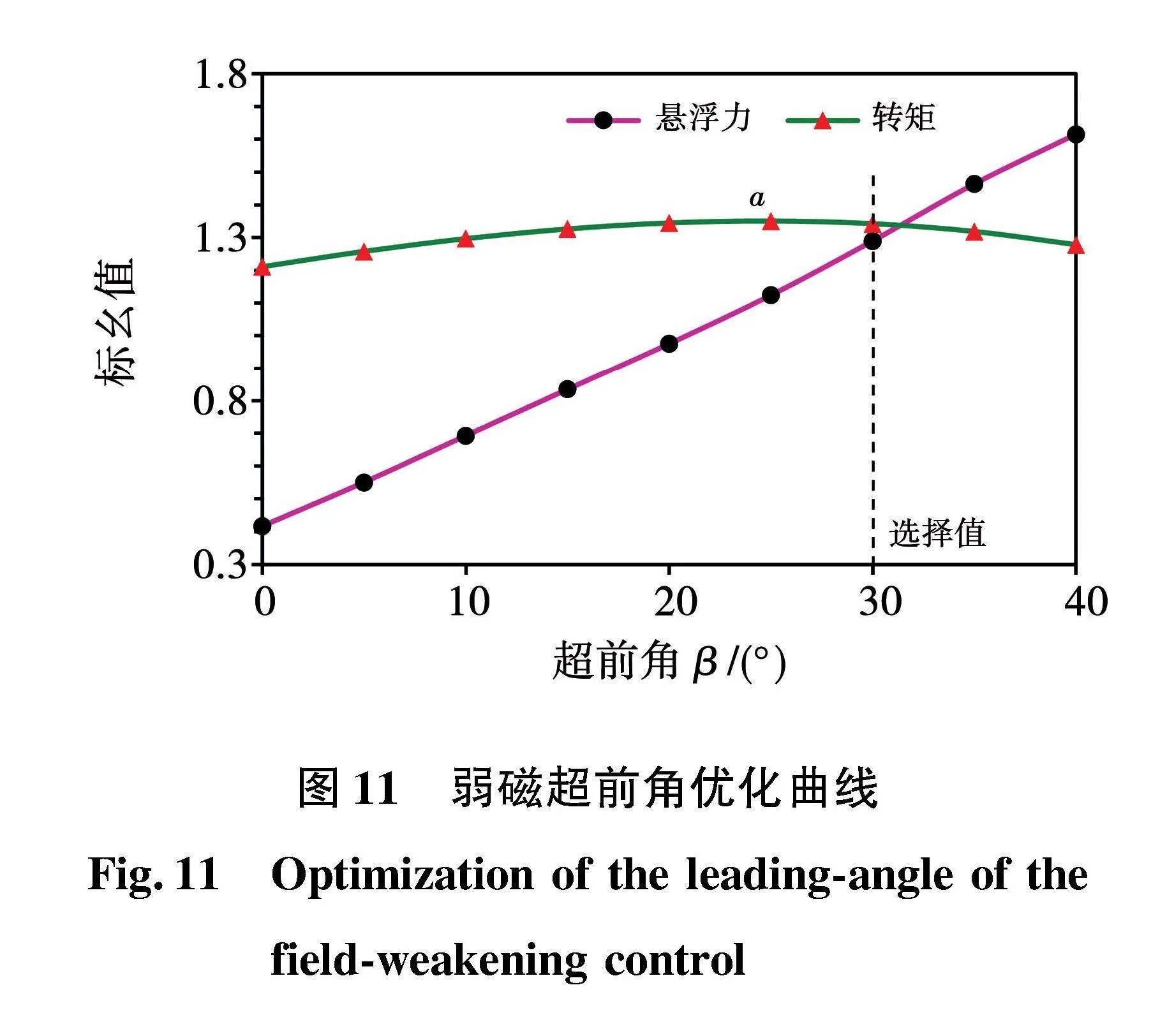
因此,本文研究的BPMSM采用凸極轉子,利用其d-q軸電感不等的特點,實現弱磁抑制飽和的同時保持轉矩輸出能力。基于表5給出的參數,改變弱磁超前角β,得出轉矩和主動懸浮力隨其變化的曲線,如圖11所示。
由圖11可知,隨著弱磁超前角β增加,主動懸浮力隨其近似線性增加。因此,降低飽和程度是提升主動懸浮力的有效策略。同時,轉矩在圖中a點處達到最大值,其對應磁阻轉矩與永磁轉矩之和最大的點。為了兼顧轉矩和主動懸浮力,本文選擇的超前角如圖所示。
3.2" 抑制端部效應
由于BPMSM長徑比小的特點,其對繞組端部伸出導致的端部效應更加敏感,可能會對轉矩和主動懸浮力帶來負面影響。因此,對端部效應進行抑制是BPMSM設計時需要特別關注的問題。
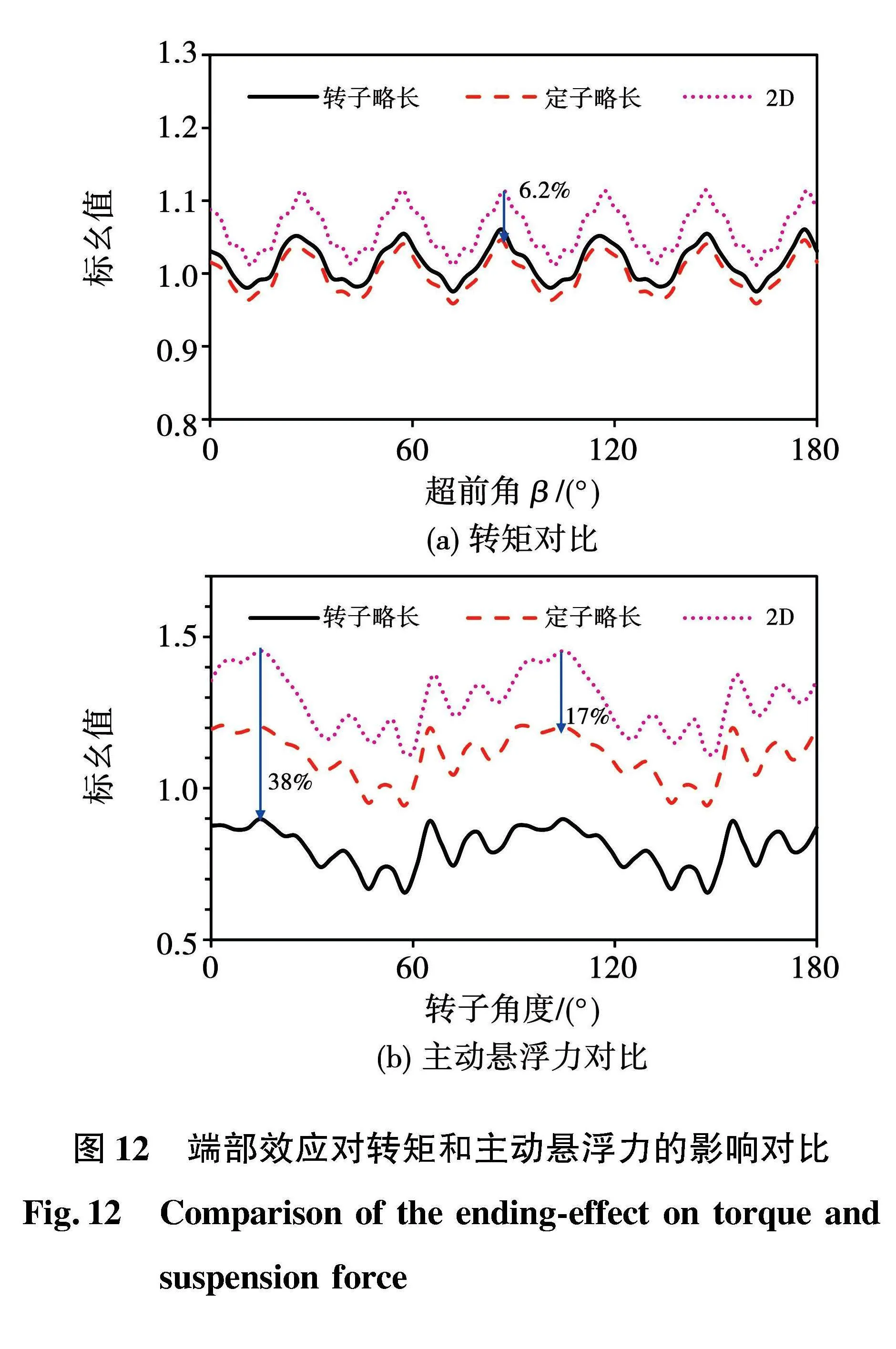
在實際加工中,定轉子通常是不等長的,本文對比了定轉子等長(圖中2D)、轉子略長和定子略長三種方案下轉矩、主動懸浮力的變化情況,如圖12所示。
由圖12(a)可知,端部效應對轉矩的影響小,最大降落僅有6.2%。由圖12(b)可知,端部效應對主動懸浮力的影響大。對比定轉子等長和轉子略長的情況,最大降落有38%,這是因為繞組端部伸出正對轉子鐵心,增強了端部效應的影響。采用定子略長的方案,最大降落僅有17%,能夠有效抑制端部效應帶來的負面影響。因此,本文所研究的BPMSM在加工時采用定子略長的方案。
4" 性能仿真分析
4.1" 電磁性能仿真分析
對于圖12所展示的定子略長的轉矩和主動懸浮力波形而言,轉矩平均值約5.7 N·m,轉矩脈動約8.7%;懸浮力平均值約22 N,懸浮力脈動約24%。
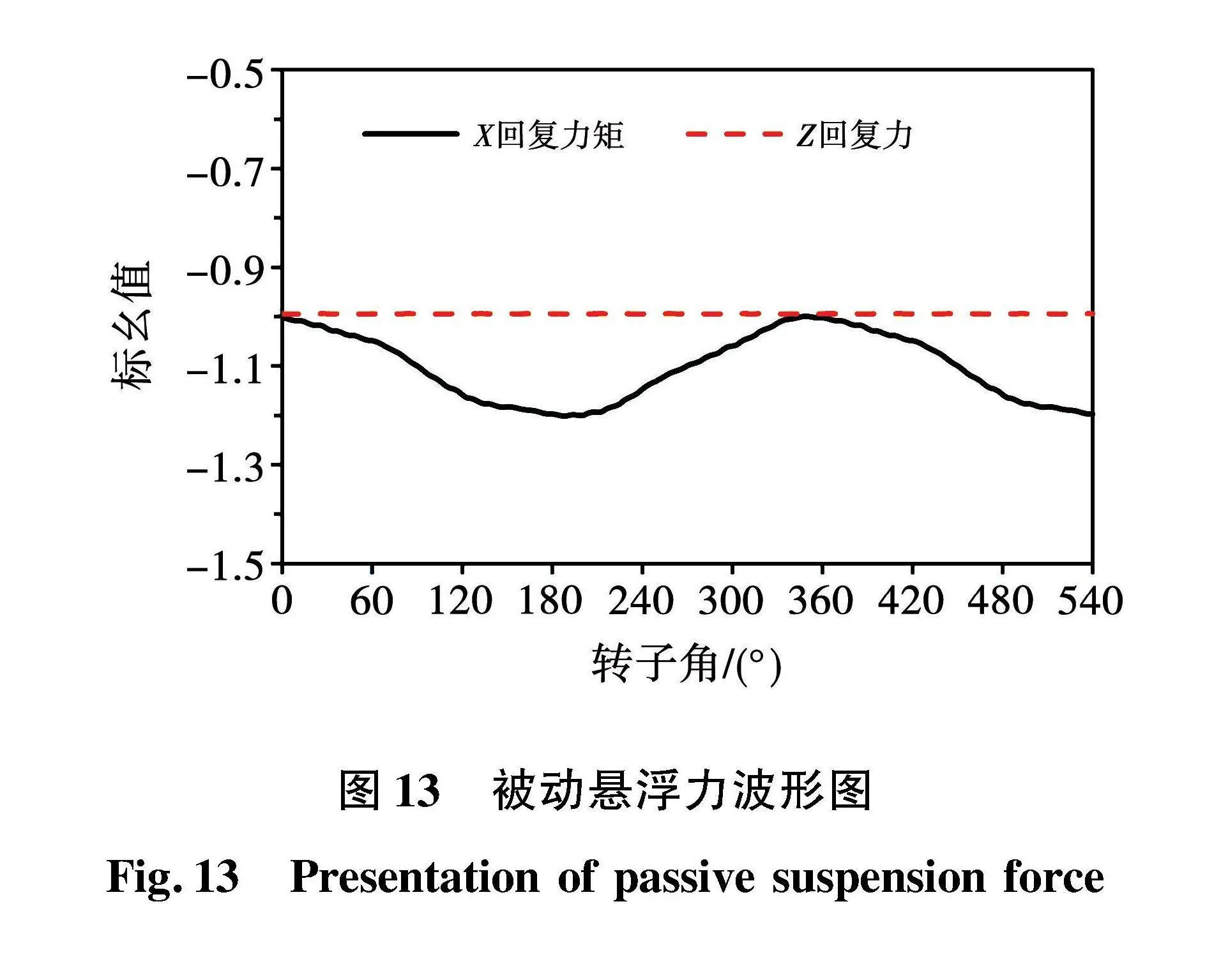
此外,需要分析設計BPMSM的被動懸浮性能。為此,將轉子分別沿Z軸平移1 mm、沿X軸翻轉1°,得到Z方向回復力和X方向回復力矩的波形,如圖13所示。
由圖13可知,Z方向回復力幾乎不變,其真實值約-13 N,方向與轉子平移方向相反;X方向回復力矩隨轉子旋轉略有波動,其平均值約-0.33 N·m,方向與轉子翻轉方向相反。因此,回復力、力矩的存在,使得BPMSM在Z和X/Y扭轉自由度上能夠實現穩定的被動懸浮。
電磁性能總結如表6所示。
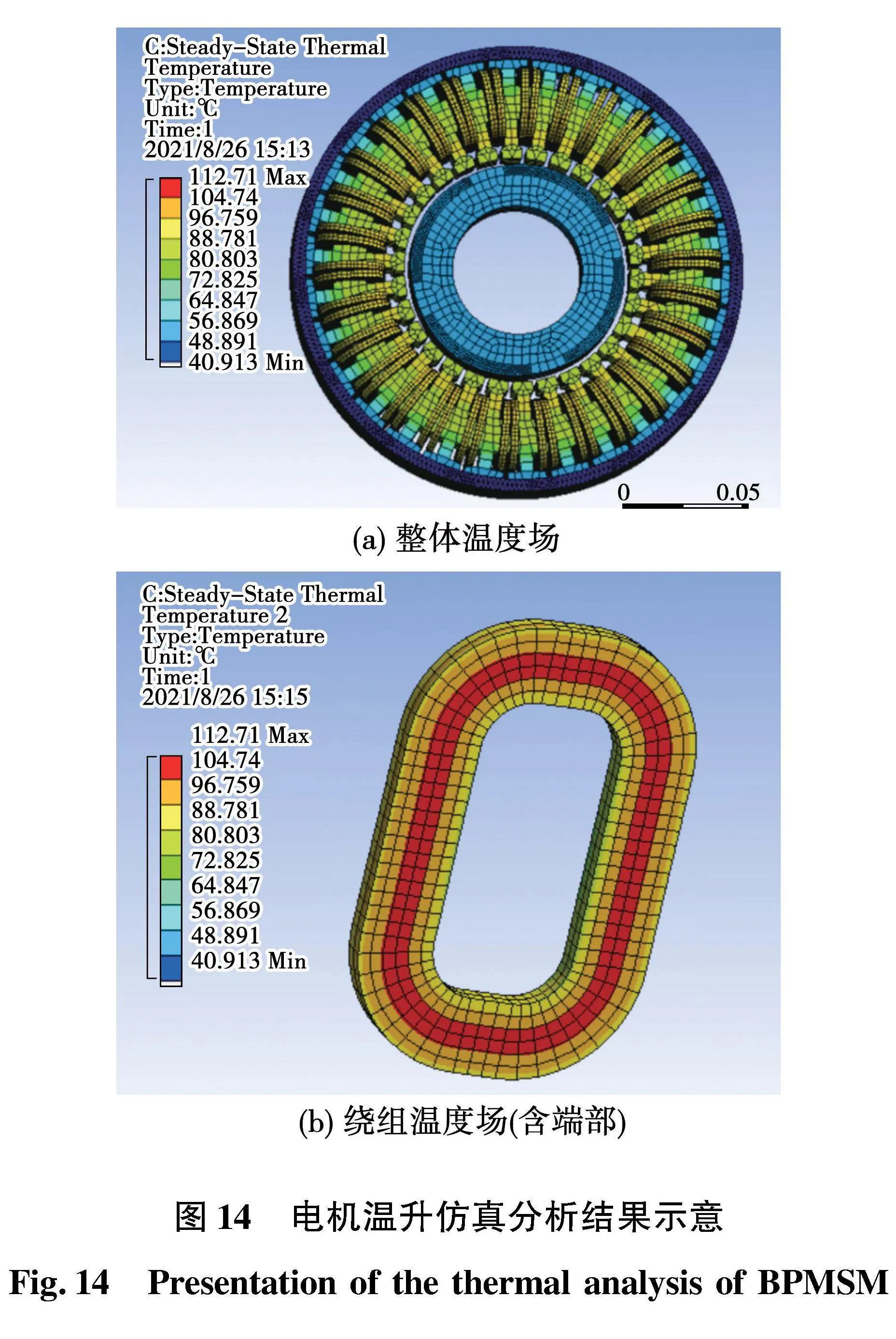
4.2" 溫度場仿真分析
由于本文提出的BPMSM運行轉速高、預期輸出的功率密度高,電機的電、磁負荷都比較大,因此電機的散熱是需要重點考慮的問題[23]。本文采取機殼水冷為主、轉子開設腰形孔風冷為輔的冷卻方式,對電機的溫升進行了仿真,結果如圖14所示。
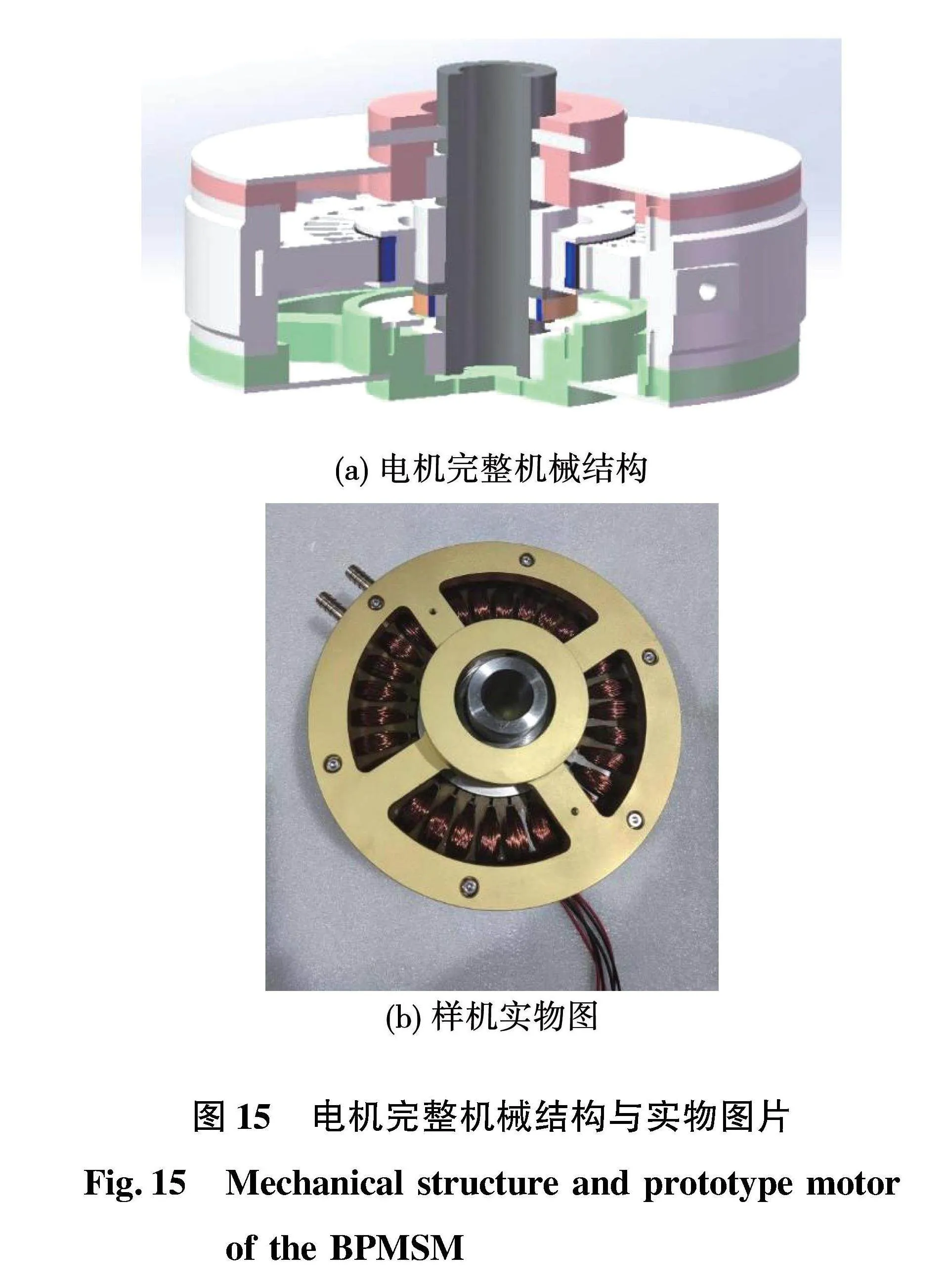
由上圖可知,電機溫升最高處為繞組及其端部的中心,約113°,考慮安全裕量,采用絕緣等級為F級的導線較為合適。配合該冷卻方式的電機完整機械結構和實物圖片如圖15所示。
5" 結" 論
本文提出了一種高速高功率密度無軸承永磁薄片電機拓撲,其采用外加碳纖維護套的表貼式永磁體結構和環形集成繞組,并提出了一種基于槽號相位圖的集成繞組快速設計方法。在綜合考慮功率密度、懸浮性能、高速機械防護等因素的基礎上,本文針對所提出的拓撲中可能導致各因素耦合的尺寸參數進行了優化設計。此外,為了解決電樞反應引起的電機飽和、繞組的端部伸出引起的端部效應等導致懸浮力下降的問題,本文分別采取超前角弱磁控制、定子比轉子略長的性能提升策略,有效地抑制了懸浮力的下降。
電磁轉矩與主、被動懸浮性能的有限元分析表明,本文所設計的無軸承永磁薄片電機在20 000 r/min的高速工況下運行時,單位幅值電流產生的電磁轉矩、主動懸浮力分別為0.166 N·m、4.4 N,電機輸出功率10 kW、功率密度5.2 kW/kg。本文的拓撲設計、參數優化流程、性能提升策略等,對高速高功率密度無軸承永磁薄片電機的設計與控制具有普遍性的指導意義。
參 考 文 獻:
[1]" 朱熀秋,郝正杰,潘偉,等.無軸承無刷直流電機的研究、應用及發展趨勢[J].電工技術學報,2019,34(21):4428.
ZHU Huangqiu, HAO Zhengjie, PAN Wei, et al. Research, application and development trends of bearingless brushless DC motor [J]. Transactions of China Electrotechnical Society, 2019,34(21):4428.
[2]" CHEN J, ZHU J, SEVERSON E L. Review of bearingless motor technology for significant power applications[J]. IEEE Transactions on Industry Applications,2019,56(2):1377.
[3]" 許穎, 朱熀秋.無軸承永磁同步電機系統及其關鍵技術發展綜述[J].中國電機工程學報,2019,39(10):2994.
XU Ying, ZHU Huangqiu. Development of bearingless permanent magnet synchronous motor system and key technologies[J]. Proceedings of the CSEE,2019,39(10):2994.
[4]" 廖啟新. 無軸承薄片電機基礎研究[D].南京:南京航空航天大學,2009.
[5]" STEINERT D, NUSSBAUMER T, KOLAR J W. Slotless bearingless disk drive for high-speed and high-purity applications[J]. IEEE Transactions on Industrial Electronics,2014,61(11):5974.
[6]" MITTERHOFER H, GRUBER W, AMRHEIN W. On the high speed capacity of bearingless drives[J]. IEEE Transactions on Industrial Electronics, 2013,61(6): 3119.
[7]" PUENTENER P,SCHUCK M,STEINERT D,et al.A 150 000 r/min bearingless slice motor[J]. IEEE/ASME Transactions on Mechatronics, 2018,23(6): 2963.
[8]" SCHUCK M, PUENTENER P, HOLENSTEIN T, et al. Scaling and design of miniature high-speed bearingless slice motors[J]. Electronic and Information-technology, 2019,136(2): 112.
[9]" WEINREB B S, NOH M, FYLER D, et al. Design and implementation of a novel interior permanent magnet bearingless slice motor[J]. IEEE Transactions on Industry Applications, 2021, 57(6): 6774.
[10]" 張煒. 無軸承永磁薄片電機預測控制及擾動抑制研究[D].鎮江:江蘇大學,2020.
[11]" GRUBER W, REMPLBAUER R, GBL E. Design of a novel bearingless permanent magnet vernier slice motor with external rotor[C]//2017 IEEE International Electric Machines and Drives Conference (IEMDC), May 21-24,2017, Miami, USA. 2017: 1-6.
[12]" STALLINGER T, GBL E, REMPLBAUER R, et al. Performance evaluation of a novel bearingless PM Vernier motor[C]//2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), December 12-15,2017, Honolulu, USA.2017:408-413.
[13]" GRUBER W, NUSSBAUMER T, GRABNER H, etal. Wide air gap and large-scale bearingless segment motor with six stator elements[J].IEEE Transactions on Magnetics,2010,46(6):2438.
[14]" GRUBER W, SILBER S, AMRHEIN W, et al. Design variants of the bearingless segment motor[C]//SPEEDAM2010, June 14-16, Pisa, Italy. 2010:1448-1453.
[15]" 朱熀秋,魏杰.內置式無軸承永磁同步電機徑向懸浮力建模[J].電機與控制學報,2013,17(5):45.
ZHU Huangqiu, WEI Jie. Radial suspension force modeling on interior bearingless permanent magnet synchronous motors[J]. Electric Machines and Control,2013,17(5):45.
[16]" 廖啟新,王曉琳,鄧智泉.無軸承薄片電機二維被動懸浮特性[J].電機與控制學報,2008,12(2):117.
LIAO Qixin, WANG Xiaolin, DENG Zhiquan. 2D analysis of passive suspension characteristics of bearingless slice motors[J]. Electric Machines and Control, 2008,12(2):117.
[17]" 崔征山,周揚忠,周祎豪.基于改進子域模型的雙繞組無軸承磁通切換電機磁場解析計算[J].電機與控制學報,2022,26(3):66.
CUI Zhengshan, ZHOU Yangzhong, ZHOU Weihao. Analytical calculation of magnetic field of dual-winding bearingless fluxswitching permanent magnet motors based on improved subdomain model[J]. Electric Machines and Contorl, 2022,26(3):66.
[18]" 王喜蓮,崔睿珍,郝毅,等.考慮磁飽和的共懸浮繞組式無軸承開關磁阻電機徑向力模型[J].電機與控制學報,2021,25(6):46.
WANG Xilian, CUI Ruizhen, HAO Yi, et al. Radial force model of a bearingless switched reluctance motor with sharing suspension windings considering magnetic saturation [J]. Electric Machines and Contorl, 2021,25(6):46.
[19]" 丁強, 鄧智泉, 王曉琳. 無軸承交替極永磁電機集中式懸浮繞組結構及其優化設計方法[J]. 電工技術學報, 2015,30(18): 104.
DING Qiang,DENG Zhiquan,WANG Xiaolin.Structure of concentrated suspension windings and its optimization design methods of bearingless consequent-pole permanent magnet motor[J].Transactions of China Electrotechnical Society,2015,30(18):104.
[20]" 武谷雨, 丁強, 王曉琳, 等. 基于磁動勢星形圖的無軸承永磁電機懸浮繞組結構優化設計[J]. 中國電機工程學報, 2016,36(21): 5930.
WU Guyu, DING Qiang, WANG Xiaolin, et al. Optimization design methods of concentrated levitation winding structures in bearingless permanent magnet motors based on the magnetic motive force star graph[J]. Proceedings of the CSEE, 2016,36(21): 5930.
[21]" SEVERSON S E, NILSSEN R, UNDELAND T, et al. Dual-purpose no-voltage winding design for the bearingless AC homopolar and consequent pole motors[J]. IEEE Transactions on Industry, 2015,51(4): 2884.
[22]" SEVERSON S E, NILSSEN R, UNDELAND T, et al. Design of dual-purpose no-voltage combined windings for bearingless motors[J]. IEEE Transactions on Industry Applications, 2017,53(5): 4368.
[23]" 韓繼超,董桀辰,張勇,等.變速抽水蓄能電機在發電工況不同轉速下磁場和損耗研究[J].大電機技術,2024(1):48.
HAN Jichao,DONG Jiechen, ZHANG Yong, et al. Research on magnetic field and loss of variable speed pumped storage generator-motor at different speeds under the generator condition[J]. Large Electric Machine and Hydraulic Turbine, 2024(1):48.
(編輯:劉素菊)
猜你喜歡
航空兵器(2016年4期)2016-11-28 21:47:29
科技資訊(2016年19期)2016-11-15 08:34:13
電腦知識與技術(2016年24期)2016-11-14 00:09:15
文理導航(2016年30期)2016-11-12 14:56:57
文藝生活·中旬刊(2016年10期)2016-11-04 06:29:49
中國科技博覽(2016年22期)2016-11-01 14:23:46
中國科技博覽(2016年22期)2016-11-01 13:48:02
中國科技博覽(2016年19期)2016-10-19 12:24:15
中國科技博覽(2016年18期)2016-10-19 08:57:06
科技視界(2016年22期)2016-10-18 15:25:08