帶恒功率負載多電平Buck變換器逆解耦自適應滑模控制
2024-07-24 00:00:00吳家榮盧振坤文春明
電機與控制學報 2024年6期
摘" 要:
針對帶恒功率負載(CPL)多電平Buck變換器的強耦合問題及負阻抗特性引起的不穩定問題,提出一種逆解耦自適應滑模控制策略。建立帶CPL多電平Buck變換器的非線性數學模型,基于逆系統方法證明系統的可逆性,并推導逆系統表達式,將模型線性化解耦為多個偽線性子系統,抵消負阻抗特性的影響。通過選取線性滑模面和指數趨近律以減弱滑模抖振,并將自適應機制引入到滑模控制中,進而為線性子系統分別設計自適應滑模控制器,進一步提高系統控制性能。基于李雅普諾夫理論對控制系統的穩定性和魯棒性進行驗證。與現有控制方法進行比較,仿真結果表明,所提控制策略具有更強的魯棒性和優越性。最后,搭建原理樣機進行實驗對比,實驗結果驗證了所提控制策略的正確性和有效性。
關鍵詞:多電平Buck變換器;恒功率負載;逆系統;自適應控制;滑模控制;解耦控制
DOI:10.15938/j.emc.2024.06.012
中圖分類號:TM46
文獻標志碼:A
文章編號:1007-449X(2024)06-0120-11
收稿日期: 2022-09-01
基金項目:國家自然科學基金(61561008);廣西高校中青年教師科研基礎能力提升項目(2021KY0164);廣西民族大學人才引進科研啟動項目(2020KJQD25)
作者簡介:吳家榮(1988—),男,博士,副教授,研究方向為電力電子變換器建模與魯棒控制;
盧振坤(1979—),男,博士,教授,研究方向為電力電子控制系統設計與優化;
文春明(1969—),男,博士,教授,研究方向為新能源汽車及其控制。
通信作者:吳家榮
Inverse decoupling adaptive sliding mode control for multilevel Buck converters with constant power load
WU Jiarong," LU Zhenkun," WEN Chunming
(College of Electronic Information, Guangxi Minzu University, Nanning 530006, China)
Abstract:
To solve the problem of strong coupling and the issue of instability caused by negative impedance characteristics of multilevel Buck converters with constant power load (CPL), an inverse decoupling adaptive sliding mode control strategy was proposed. The nonlinear mathematical model of multilevel Buck converters with CPL was established. The reversibility of the system was proved by the inverse system method, and the expression of the inverse system was deduced. The model is linearly decoupled into multiple pseudo-linear subsystems. The negative impedance characteristics are offset. Linear sliding mode surfaces and exponential convergence laws were selected to reduce sliding mode chattering, and an adaptive mechanism was introduced to the sliding mode control, adaptive sliding mode controllers were designed for the linear subsystems respectively to further improve the control performance of the system. Furthermore, the stability and robustness of the control system were verified based on the Lyapunov theory. Compared with the existing control method, the simulation results show that the proposed control strategy has stronger robustness and better superiority. Finally, a prototype was built for experiments, and the experimental comparison results verify correctness and effectiveness of the proposed control strategy.
Keywords:multilevel Buck converters; constant power load; inverse system; adaptive control; sliding mode control; decoupling control
0" 引" 言
多電平DC-DC(multilevel DC-DC,MD)變換器因較傳統兩電平DC-DC變換器具有更低的電壓應力、更多的電平輸出、更小的濾波體積等優點,已逐漸在低壓、低功率領域得到了應用與研究[1-2]。為使MD變換器能正常工作且具有良好工作性能,保證飛跨電容(flying capacitor,FC)電壓穩定至各自平衡值極其關鍵[3-4]。然而,MD變換器是一類復雜的非線性系統,具有多輸入多輸出特性,輸出電壓與FC電壓之間存在強耦合作用,給FC電壓的平衡及系統的解耦控制帶來挑戰[5]。
為了解決上述問題,現有文獻的處理方法可大致分為三類,即增加外部電路方法、線性解耦法和精確反饋線性化(exact feedback linearization,EFL)解耦法。對于增加外部電路方法,文獻[6]提出增強型FC電壓平衡方法,該方法通過在原拓撲上增加外圍電路以達到改善FC電壓平衡的目標。文獻[7]提出一種在MD Buck變換器輸出端并聯接入RLC諧振電路的控制方案,以加快FC電壓的調節速度。然而,增加外部電路法加大了系統的體積和損耗,難以兼顧FC電壓和輸出電壓的耦合性,提高了系統的控制難度。為此,線性解耦法被提出。文獻[8]對MD Buck變換器提出一種基于線性解耦矩陣法的平衡控制策略,提升了系統的穩定性。文獻[9]基于線性解耦法實現MD Buck變換器系統解耦的基礎上,設計了等效滑模控制器以提高系統的控制性能。然而,線性解耦法建立在小信號模型基礎上,難以滿足現有應用對更高控制性能和更強魯棒性的要求。為了克服上述缺陷,基于EFL的解耦控制方法被關注。文獻[3]采用EFL控制與最優控制相結合的方法實現了MD Buck變換器的解耦控制,提高了系統的動態性能。為實現FC電壓和輸出電壓的解耦,文獻[10]對工作于電感電流連續導電模式(continuous conduction mode,CCM)下的四電平Buck變換器提出一種EFL控制方法,降低了控制器設計的復雜度。然而,EFL方法的缺陷在于其強依賴于被控對象的精確數學模型。
滑模控制(sliding mode control,SMC)對系統不確定性、外界干擾和未建模動態具有強魯棒性,能有效克服EFL方法的上述缺陷[11-12]。然而,SMC的切換增益大小需視不確定擾動的上界值而定,這難以在系統實際運行中進行估量,導致系統的穩定難以維持[13]。此外,隨著電力電子應用的推廣,大量的電子負載連接到MD變換器上。當電子負載輸出功率恒定時,該類負載可視為恒功率負載(constant power load,CPL)[14-15]。CPL的負阻抗特性不僅會增加系統的非線性,還會嚴重減小系統的阻尼系數,給帶CPL MD變換器的穩定控制帶來困難[16]。而現有研究對MD變換器的研究仍停留在輸出端僅接有純電阻負載的情形,難以滿足同時為純電阻負載和CPL供電的需求。
鑒于此,本文對帶CPL MD Buck變換器提出一種逆解耦自適應滑模控制策略。一方面,采用逆系統方法實現系統的線性化與解耦,抵消CPL負阻抗特性的影響,利于控制器的設計;另一方面,對變換器采用SMC技術,解決EFL方法嚴重依賴被控對象精確數學模型的問題,提升系統的魯棒性。此外,引入自適應技術估計SMC的切換增益,提高系統的穩定性能。最后,進行仿真比較和實驗對比驗證。
1" 數學模型
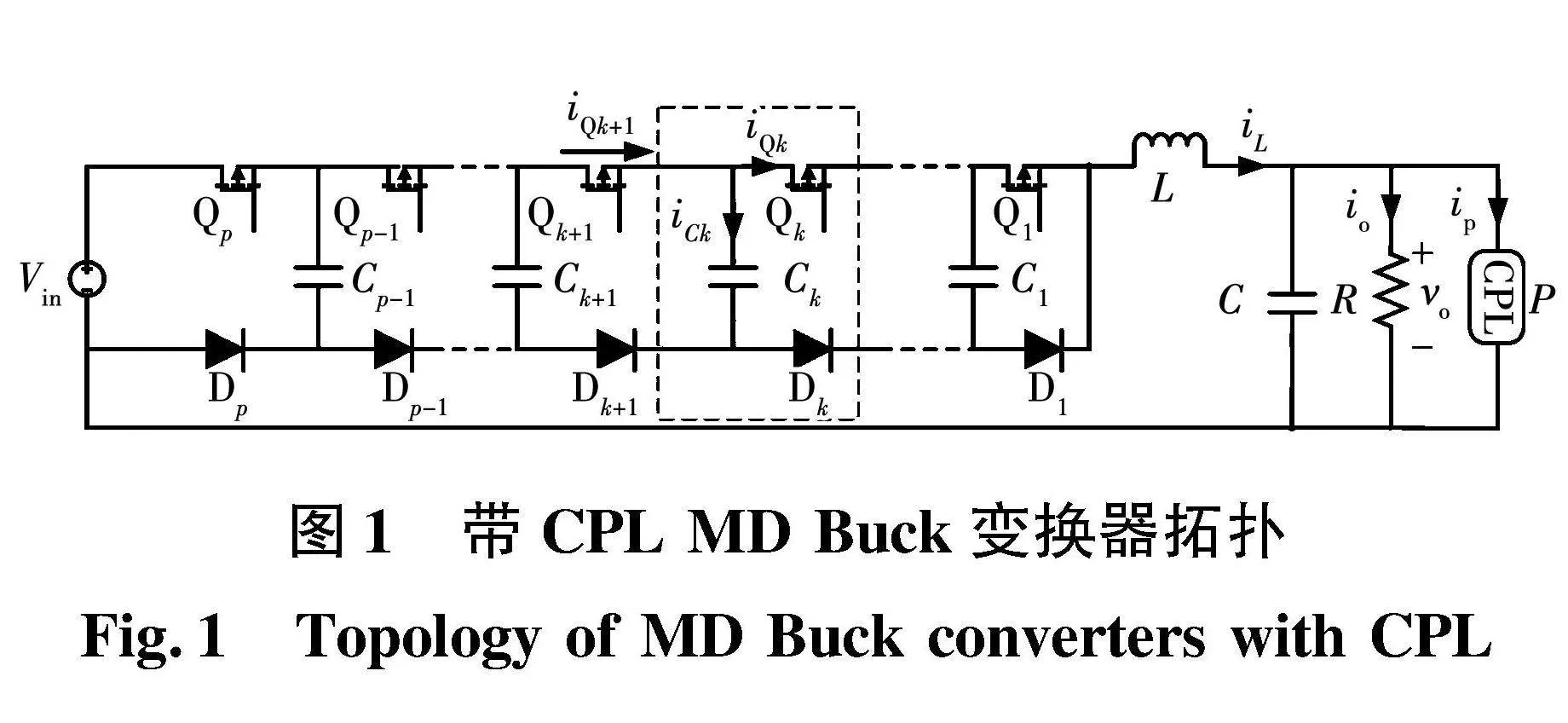
圖1給出了帶CPL MD Buck變換器的電路拓撲,主要包含輸入電壓Vin、電感L、電容C、阻性負載電阻R、恒功率負載CPL以及p個串聯的基本單元組成。其中,開關管Qk(k=1,2,…,p)、二極管Dk(k=1,2,…,p)及飛跨電容Ck(k=1,2,…,p-1)組成一個基本單元,如虛線框所示。Qk和Dk互不導通,P代表CPL的功率。理想狀態下,開關管的占空比均為d,且Qk+1和Qk相位差2π/p,此時FC電壓平衡于kVin/p,輸出電壓vo=dVin。
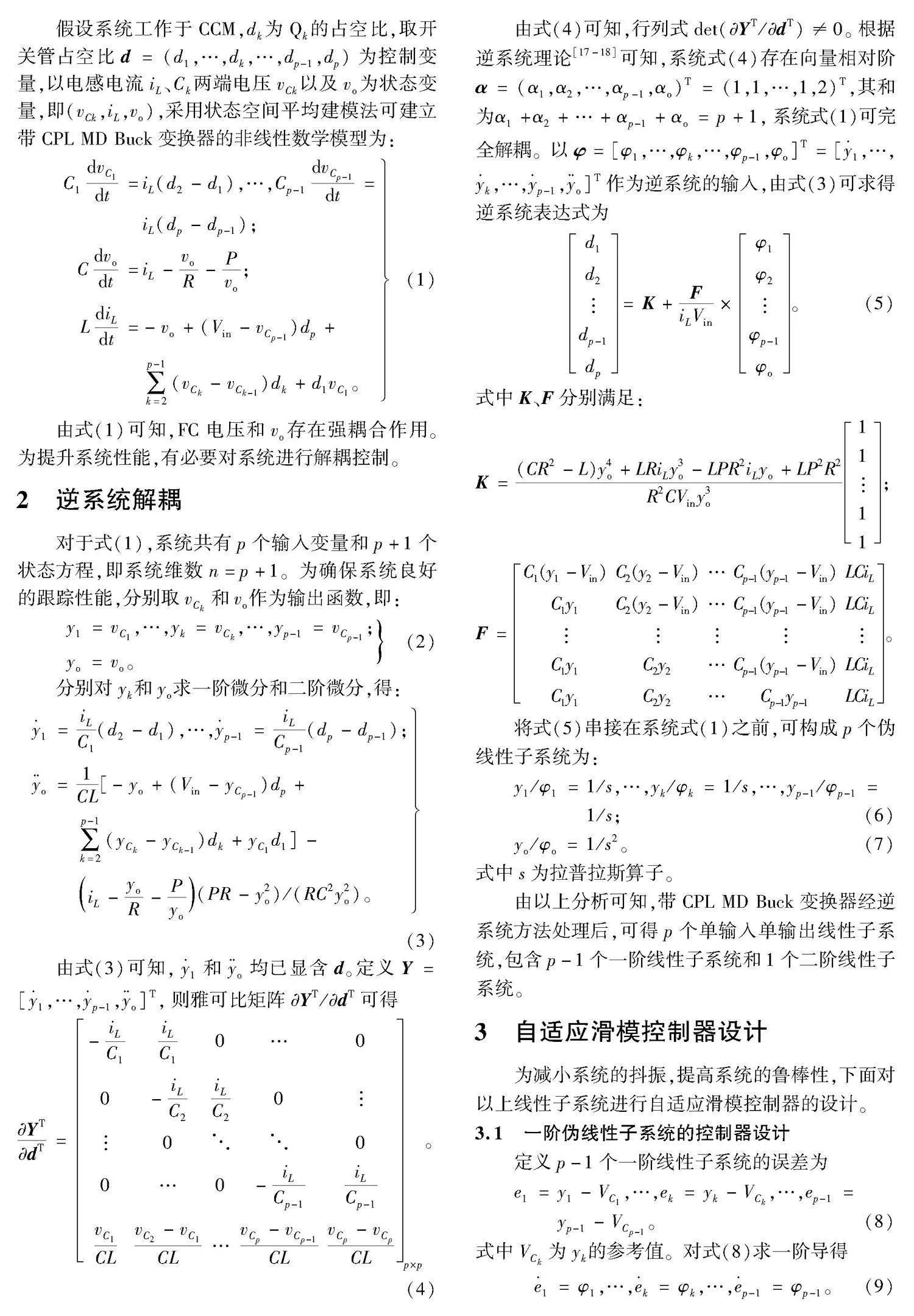
假設系統工作于CCM,dk為Qk的占空比,取開關管占空比d=(d1,…,dk,…,dp-1,dp)為控制變量,以電感電流iL、Ck兩端電壓vCk以及vo為狀態變量,即(vCk,iL,vo),采用狀態空間平均建模法可建立帶CPL MD Buck變換器的非線性數學模型為:
C1dvC1dt=iL(d2-d1),…,Cp-1dvCp-1dt=iL(dp-dp-1);
Cdvodt=iL-voR-Pvo;
LdiLdt=-vo+(Vin-vCp-1)dp+
∑p-1k=2(vCk-vCk-1)dk+d1vC1。(1)
由式(1)可知,FC電壓和vo存在強耦合作用。為提升系統性能,有必要對系統進行解耦控制。
2" 逆系統解耦
對于式(1),系統共有p個輸入變量和p+1個狀態方程,即系統維數n=p+1。為確保系統良好的跟蹤性能,分別取vCk和vo作為輸出函數,即:
y1=vC1,…,yk=vCk,…,yp-1=vCp-1;
yo=vo。(2)
分別對yk和yo求一階微分和二階微分,得:
y·1=iLC1(d2-d1),…,y·p-1=iLCp-1(dp-dp-1);
y··o=1CL[-yo+(Vin-yCp-1)dp+
∑p-1k=2(yCk-yCk-1)dk+yC1d1]-
iL-yoR-Pyo(PR-y2o)/(RC2y2o)。(3)
由式(3)可知,y·1和y··o均已顯含d。定義Y=[y·1,…,y·p-1,y··o]T,則雅可比矩陣YT/dT可得
YTdT=-iLC1iLC10…0
0-iLC2iLC2000
0…0-iLCp-1iLCp-1
vC1CLvC2-vC1CL…vCp-vCp-1CLvCp-vCpCLp×p。(4)
由式(4)可知,行列式det(YT/dT)≠0。根據逆系統理論[17-18]可知,系統式(4)存在向量相對階α=(α1,α2,…,αp-1,αo)T=(1,1,…,1,2)T,其和為α1+α2+…+αp-1+αo =p+1,系統式(1)可完全解耦。以φ=[φ1,…,φk,…,φp-1,φo]T=[y·1,…,y·k,…,y·p-1,y··o]T作為逆系統的輸入,由式(3)可求得逆系統表達式為
d1d2dp-1dp=K+FiLVin×φ1φ2φp-1φo。(5)
式中K、F分別滿足:
K=(CR2-L)y4o+LRiLy3o-LPR2iLyo+LP2R2R2CViny3o1111;
F=C1(y1-Vin)C2(y2-Vin)…Cp-1(yp-1-Vin)LCiL
C1y1C2(y2-Vin)…Cp-1(yp-1-Vin)LCiLC1y1C2y2…Cp-1(yp-1-Vin)LCiLC1y1C2y2…Cp-1yp-1LCiL。
將式(5)串接在系統式(1)之前,可構成p個偽線性子系統為:
y1/φ1=1/s,…,yk/φk=1/s,…,yp-1/φp-1=
1/s;(6)
yo/φo=1/s2。(7)
式中s為拉普拉斯算子。
由以上分析可知,帶CPL MD Buck變換器經逆系統方法處理后,可得p個單輸入單輸出線性子系統,包含p-1個一階線性子系統和1個二階線性子系統。
3" 自適應滑模控制器設計
為減小系統的抖振,提高系統的魯棒性,下面對以上線性子系統進行自適應滑模控制器的設計。
3.1" 一階偽線性子系統的控制器設計
定義p-1個一階線性子系統的誤差為
e1=y1-VC1,…,ek=yk-VCk,…,ep-1=
yp-1-VCp-1。(8)
式中VCk為yk的參考值。對式(8)求一階導得
e·1=φ1,…,e·k=φk,…,e·p-1=φp-1。(9)
根據滑模控制理論可知,采用指數趨近律能有效減弱滑模抖振[19]。因此,將線性滑模面及指數趨近律分別設計為:
s1=e1,…,sk=ek,…,sp-1=ep-1;(10)
s·1=-c1sgn(s1)-c11s1,…,s·k=
-cksgn(sk)-ckksk,…,s·p-1=
-cp-1sgn(sp-1)-cp-1,p-1sp-1。(11)
式中:ckgt;0為切換增益,決定了控制運動點收斂至滑模面的速率;ckkgt;0為常數。
結合式(9)~式(11),可求得p-1個FC電壓的控制律分別為
φ1=-c1sgn(s1)-c11s1,…,φk=
-cksgn(sk)-ckksk,…,φp-1=-cp-1sgn(sp-1)-cp-1,p-1sp-1。(12)
3.2" 二階偽線性子系統的控制器設計
定義二階線性子系統的誤差為
eo=yo-Voref。(13)
式中Voref為yo的參考值。對式(13)求二階導,得
e··o=φo。(14)
定義二階滑模面及滑模控制律分別為:
so=e·o+βeo;(15)
s·o=-cosgn(so)-cooso。(16)
式中:β為大于0的常數;cogt;0為切換增益;coogt;0為常數。結合式(13)~式(16),求得vo的控制律為
φo=-βe·o-cosgn(so)-cooso。(17)
下面對系統的穩定性和魯棒性進行驗證。
由于變換器在運行期間,常受到電路參數變化、外界擾動等不確定干擾的影響,假設系統式(9)和系統式(14)分別存在有界干擾Gk(t)和O(t),則式(9)和式(14)可修改為:
e·1=φ1+G1(t),…,e·k=φk+Gk(t),…,e·p-1=φp-1+Gp-1(t);
e··o=φo+O(t)。(18)
式中|Gk(t)|gt;0和|O(t)|gt;0均有界, 即|Gk(t)|lt;Nk,|O(t)|lt;M,其中Nk和M分別為|Gk(t)|和|O(t)| 的上界。
取李雅普諾夫函數為
V1=0.5s21+…+0.5s2p-1+0.5s2o。(19)
結合式(11)、式(16)和式(18),對式(19)求一階導得
V·1=s1s·1+…+sp-1s·p-1+sos·o=
s1[-c1sgn(s1)-c11s1+G1(t)]+…+
sp-1[-cp-1sgn(sp-1)-cp-1,p-1sp-1+Gp-1(t)]+
so[-cosgn(so)-cooso+O(t)]lt;|s1|×
G1(t)-c1|s1|-c11s21+…+|sp-1|×
Gp-1(t)cp-1|sp-1|-cp-1,p-1s2p-1+|so|×
O(t)-co|so|-coos2olt;-(c1-N1)|s1|-
c11s21-…-(cp-1-Np-1)|sp-1|-cp-1,p-1s2p-1-(co-M)|so|-coos2o。(20)
為保證V·1lt;0,則需滿足:
N1lt;c1,…,Nklt;ck,…,Np-1lt;cp-1;
Mlt;co。(21)
由式(21)可知,切換增益ck和co的選擇分別取決于|Gk(t)| 和|O(t)| 的上界值Nk和M。若ck和co選擇過大以確保系統的穩定性,可能會導致運動點趨近滑模面時速率過大,進而引起嚴重的抖振現象。因此,本文引入自適應律[20-21]來更新ck和co。假設c^k和c^o分別表示Nk和M的估計值,則自適應律可設計為:
c^·1=ρ1|s1|,…,c^·k=ρk|sk|,…,c^·p-1=
ρp-1|sp-1|;
c^·o=γ|so|。(22)
式中:ρkgt;0;γgt;0。
為了驗證系統式(6)和式(7),使用式(12)和式(16)中的控制律以及式(22)中的自適應律,閉環系統是漸近穩定的。
取李雅普諾夫函數為
V2=V1+12ρ1(c^1-N1)2+…+
12ρk(c^k-Nk)2+…+12ρp-1(c^p-1-Np-1)2+
12γ(c^o-M)2。(23)
將式(19)和式(22)代入式(23),并對式(23)求一階導,得
V·2=s1[-c^1sgn(s1)-c11s1+G1(t)]+…+
sp-1[-c^p-1sgn(sp-1)-cp-1,p-1sp-1+Gp-1(t)]+
so[-c^osgn(so)-cooso+O(t)]+
1ρ1(c^1-N1)c^·1+…+1ρp-1(c^p-1-Np-1)c^·p-1+
1γ(c^o-M)c^·o=G1(t)s1-N1|s1|-
c11s21+…+Gp-1(t)sp-1-Np-1|sp-1|-
cp-1,p-1s2p-1+O(t)so-M|so|-coos2olt;
-[N1-G1(t)]|s1|-c11s21-…-
[Np-1-Gp-1(t)]|sp-1|-cp-1,p-1s2p-1-
[M-O(t)]|so|-coos2olt;0。(24)
因此,系統式(6)和式(7)在(ek,eo)=(0,0)處是漸近穩定的。聯立式(5)、式(12)、式(17)和式(22),可求得帶CPL MD Buck變換器的控制律d為
d1d2dp-1dp=K+FiLVin-c^1sgn(s1)-c11s1-c^2sgn(s2)-c22s2-c^p-1sgn(sp-1)-cp-1,p-1sp-1-βe·o-c^osgn(so)-cooso。(25)
式中K、F均滿足式(5)。
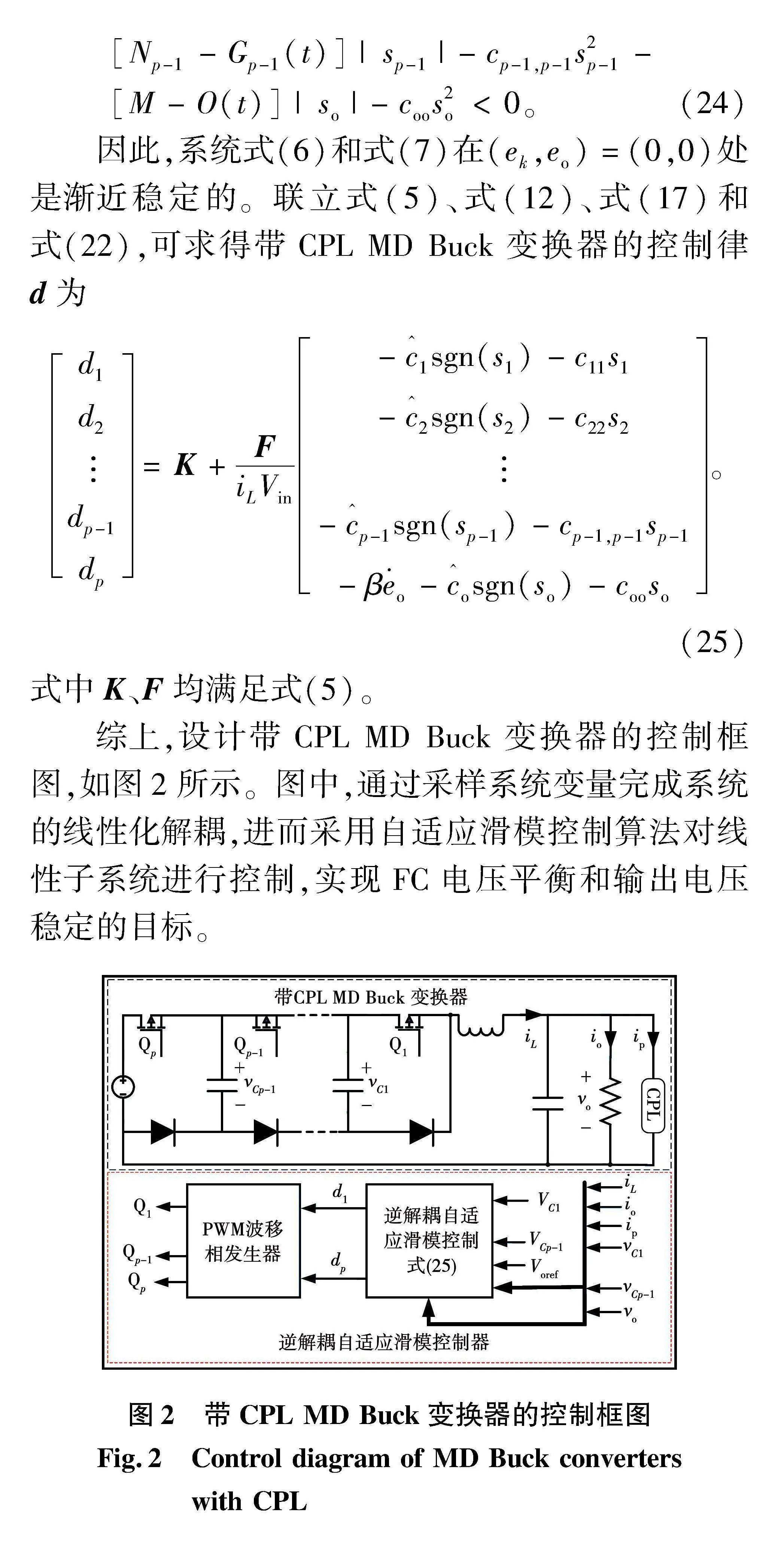
綜上,設計帶CPL MD Buck變換器的控制框圖,如圖2所示。圖中,通過采樣系統變量完成系統的線性化解耦,進而采用自適應滑模控制算法對線性子系統進行控制,實現FC電壓平衡和輸出電壓穩定的目標。
4" 仿真結果
為了驗證所提控制策略的有效性和優越性,在MATLAB/Simulink平臺上搭建了帶CPL七電平Buck變換器仿真模型進行研究,其中p=6,并采用一個閉環控制Buck變換器來等效CPL。所提逆解耦自適應滑模控制(inverse decoupling adaptive sliding mode control,ID-ASMC)與文獻[8]提出的線性解耦比例積分控制(linear decoupling proportional integral control,LD-PIC)進行對比。系統參數取為:Vin=60 V,Voref=30 V,C1=C2=C3=C4=C5=200 μF,L=1 mH,C=330 μF,R=27.5 Ω,fs=50 kHz,P=25 W。為保證系統的穩定性和魯棒性,所提控制策略的參數選取為:c11=c22=c33=c44=c55=1×105,ρ1=ρ2=ρ3=ρ4=ρ5=200,β=900,γ=800,coo=1×105。
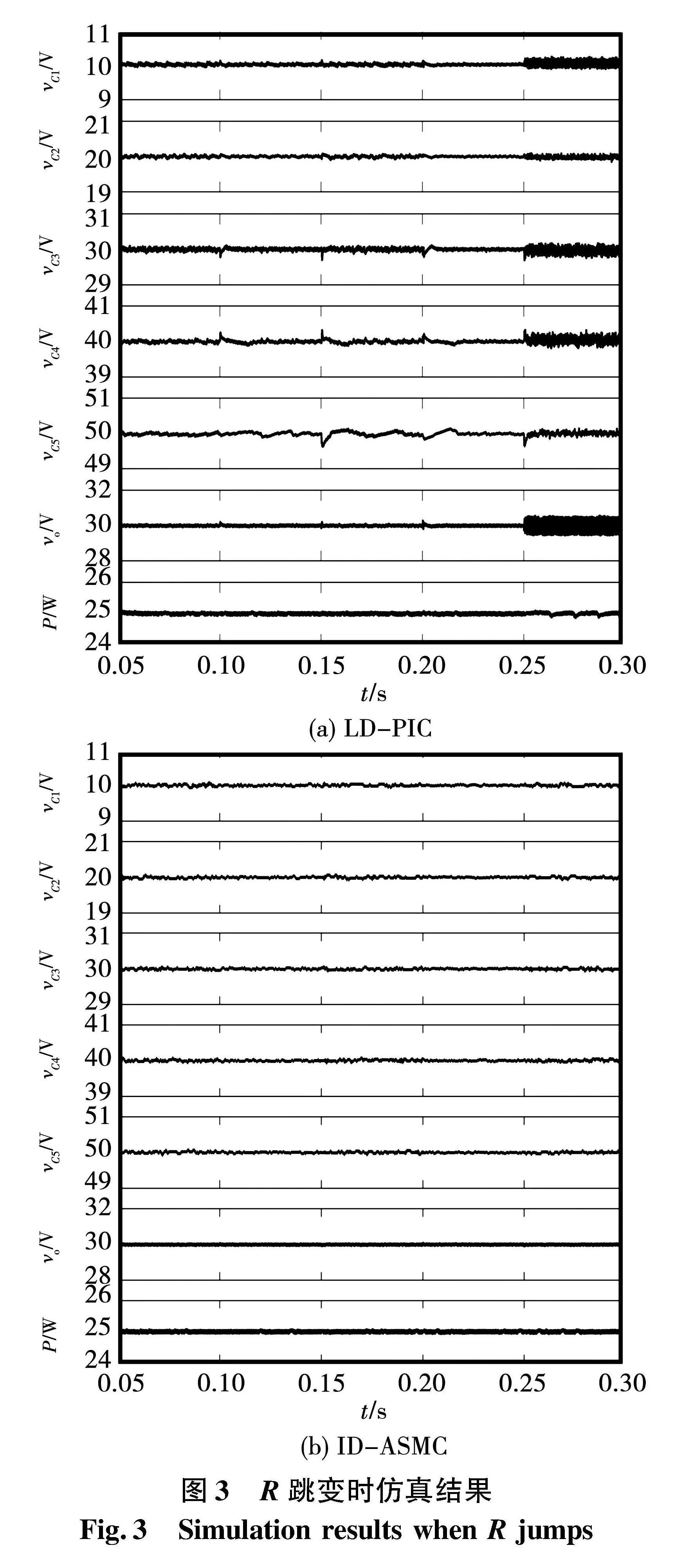
圖3給出了R分別在0.1 s(27.5 Ω→70 Ω)、0.15 s(70 Ω→27.5 Ω)、0.2 s(27.5 Ω→10 000 Ω)和0.25 s(10 000 Ω→27.5 Ω)跳變時2種控制方法的仿真結果。可以看出,在2種控制策略下,vC1、vC2、vC3、vC4、vC5分別平衡于10、20、30、40、50 V,即Vin/6、2Vin/6、3Vin/6、4Vin/6、5Vin/6,vo穩定于30 V,并能給CPL提供25 W的功率,保證系統的穩定。當R跳變時,LD-PIC下的FC電壓和vo均有一定的波動。如:當R由10 000 Ω下降至27.5 Ω時,在LD-PIC下,vo的電壓波動最大值達0.78 V,vC5的電壓波動量為0.3 V,其他FC電壓有振蕩過程。而在ID-ASMC下,阻性負載擾動對vo和FC電壓的影響甚微,系統表現出良好的抗干擾性能。
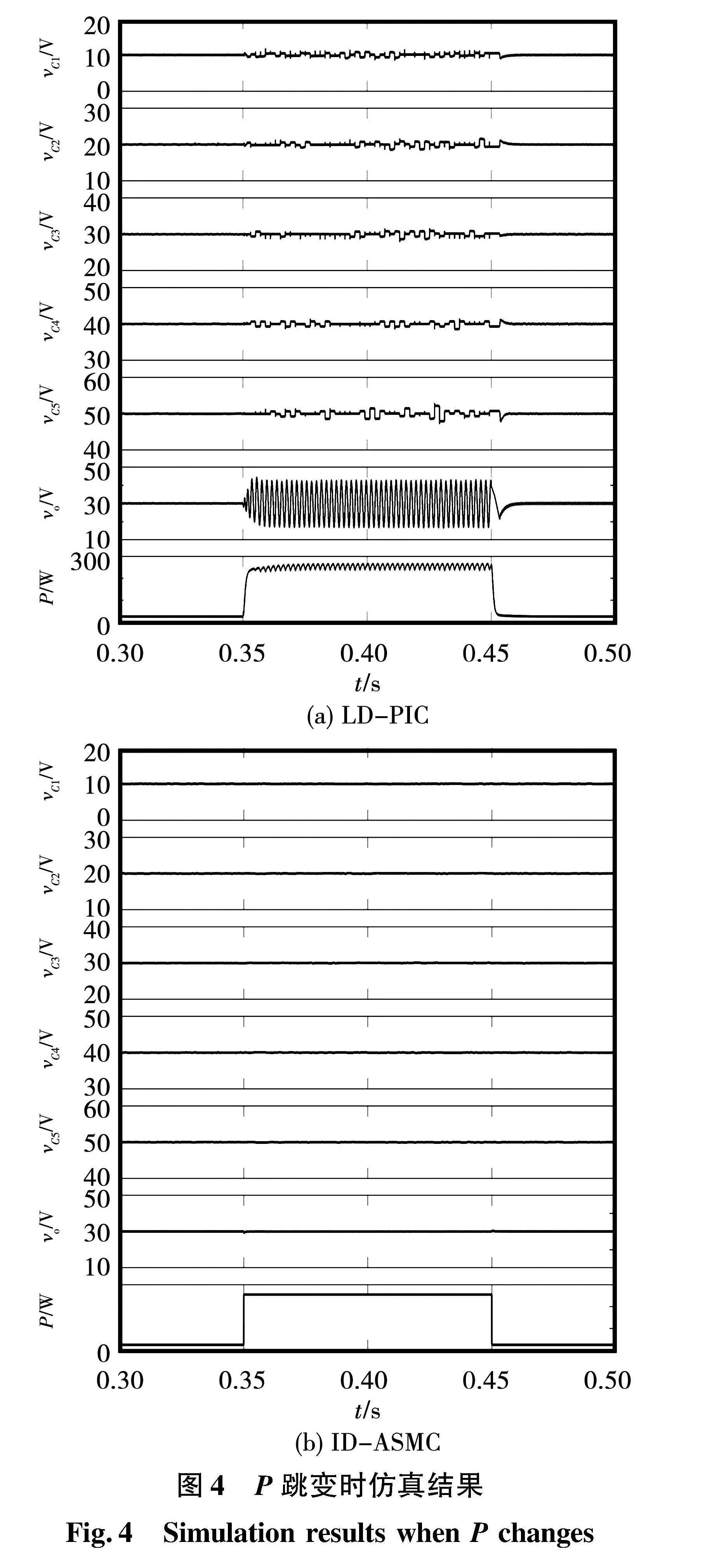
圖4給出了P分別在0.35 s(25 W→256 W)和0.45 s(256 W→25 W)變化時2種控制方法的仿真結果。在LD-PIC下,vo出現嚴重的振蕩,難以穩定于30 V,其電壓峰峰值為26.8 V。此外,vC1、vC2、vC3、vC4、vC5均存在不同程度的振蕩過程,在各自的平衡值附近波動。而在ID-ASMC下,FC電壓和vo均無電壓波動和振蕩過程,穩定于各自參考值,受P變化的影響極小,表現出更強的魯棒性,有效抑制了負阻抗特性對系統的影響。
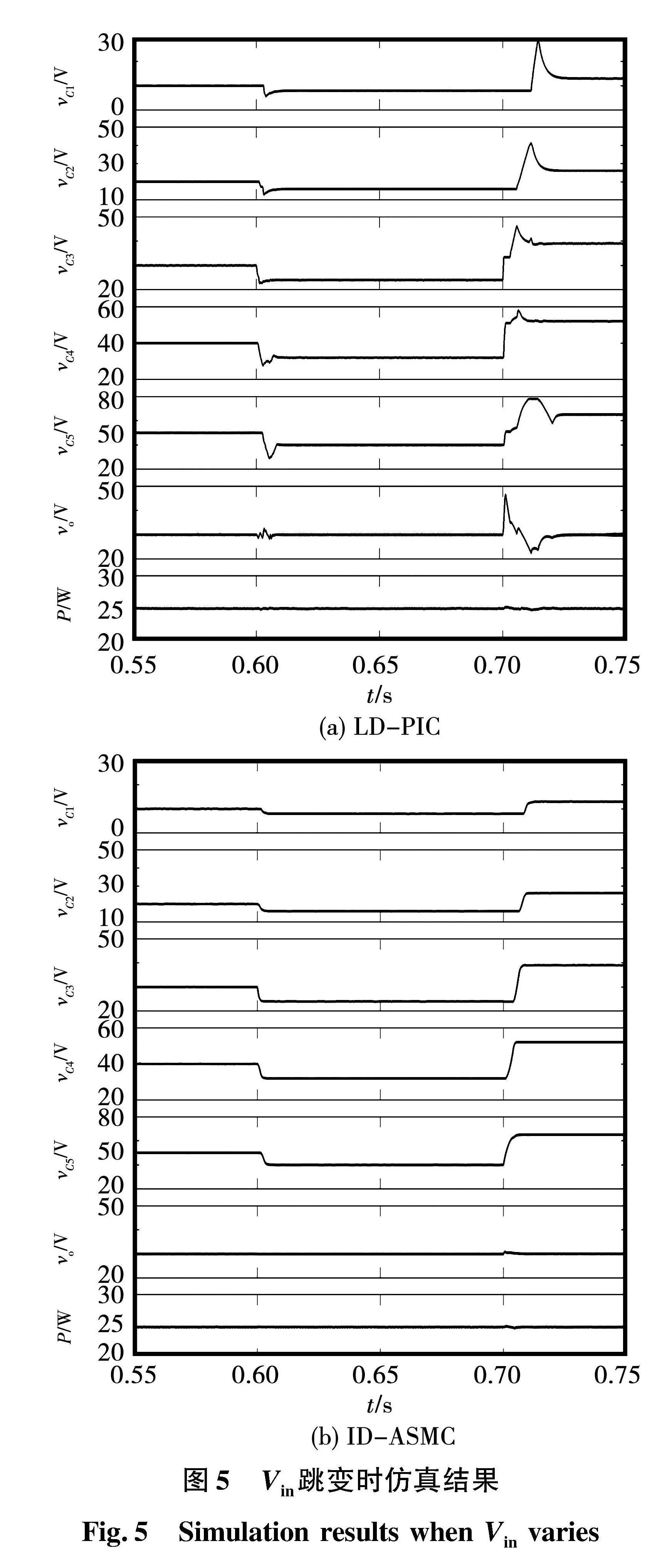
圖5給出了Vin分別在0.6 s(60 V→48 V)和0.7 s(48 V→78 V)變化時2種控制方法的仿真結果。由于vCk平衡于kVin / p,所以Vin變化的同時,FC參考電壓也隨之發生改變。在LD-PIC下,vo波動嚴重,vCk(k=1,2,3,4,5)均能平衡于kVin / 6,但vCk均存在嚴重的電壓波動。如:當Vin由48 V跳變至78 V時,在LD-PIC下,vCk的電壓波動量分別為17、14、8、6、14 V,vo的電壓波動量為18.5 V。在ID-ASMC下,vo存在1.2 V的電壓波動,而vCk能無超調地穩定于各自參考值,受Vin的影響極小,驗證了所提ID-ASMC實現了FC電壓和輸出電壓的解耦。
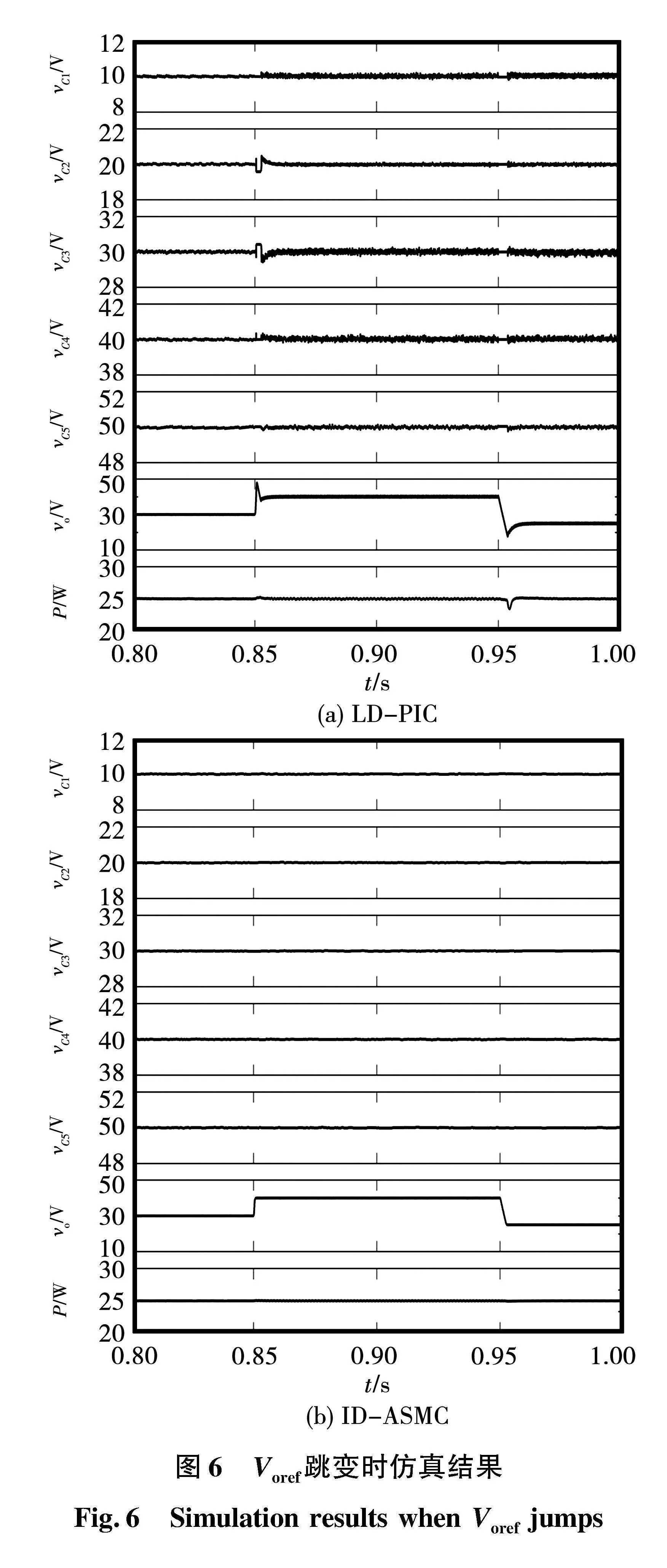
圖6給出了Voref分別在0.85s (30 V→40 V)和0.95 s (40 V→25 V)變化時2種控制方法的仿真結果。當Voref由40 V突降至25 V時,在LD-PIC下,vo存在7 V的電壓下沖,vCk(k=1,2,3,4,5)均受到Voref突變的影響。在ID-ASMC下,Voref變化對FC電壓幾乎毫無影響,同時vo能快速平滑跟蹤Voref的變化,給CPL提供恒定的25 W功率,進一步驗證了所提ID-ASMC能有效實現FC電壓和輸出電壓的解耦。
為了進一步說明所提控制策略在低電平變換器應用的有效性,基于MATLAB平臺對帶CPL三電平Buck變換器進行仿真研究,并與LD-PIC作比較。變換器參數設計為:Vin=28 V,Voref=11 V,R=50 Ω,C=940 μF,C1=220 μF,L=330 μH,fs=50 kHz,P=7 W。控制參數取為:ρ1=900,c11=1×106,β=6×103,γ= 1×103,coo=1×107。
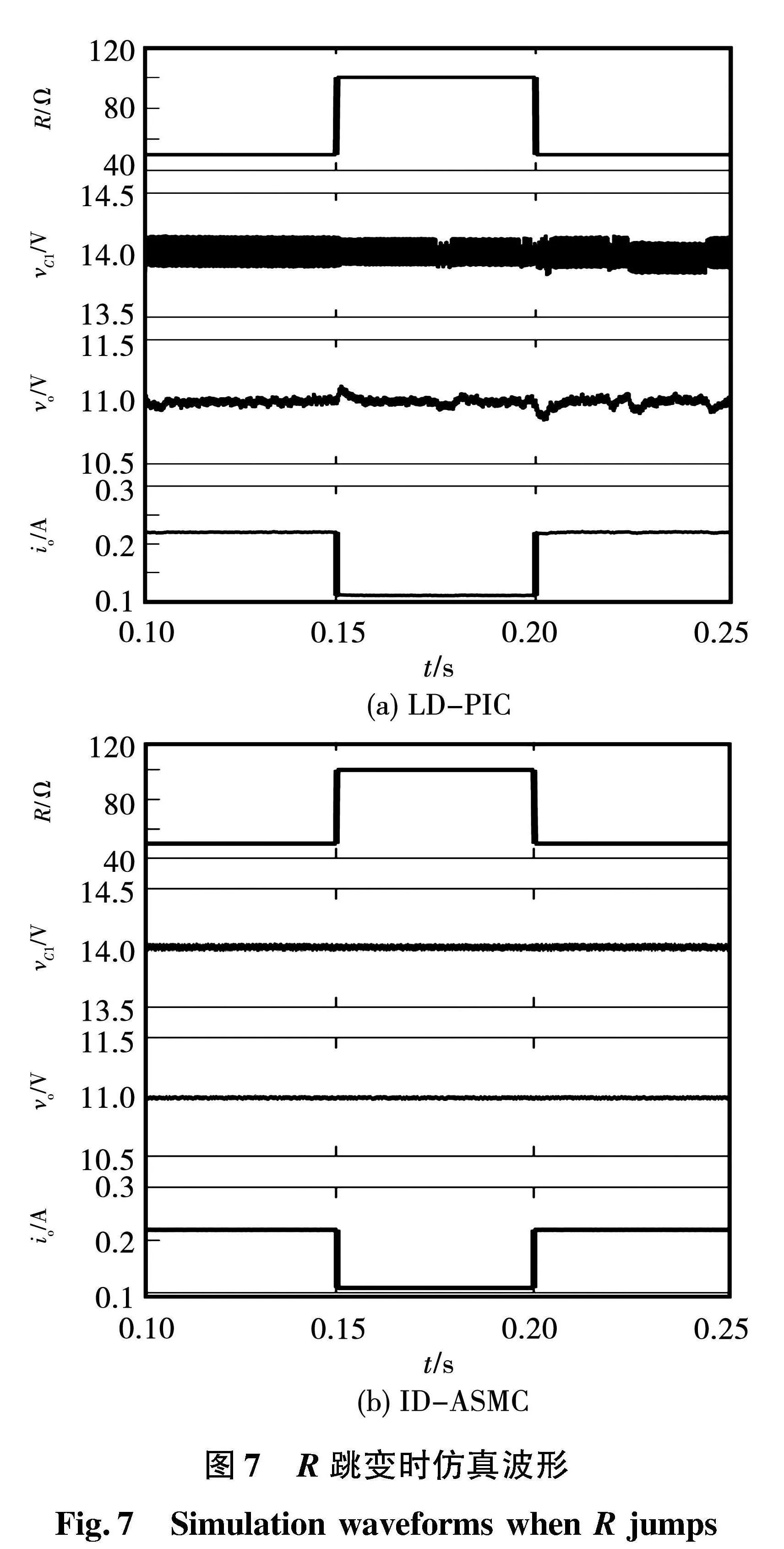
圖7給出了R分別于0.15 s(50 Ω→100 Ω)和0.2 s(100 Ω→50 Ω)跳變時仿真波形。由圖7可知,在2種控制策略下,vo均穩定于11 V,vC1均平衡于14 V,即Vin/2。當R由100 Ω變化至50 Ω時,在LD-PIC下,vC1存在0.1 V的電壓波動,vo的電壓波動量為0.2 V;而在ID-ASMC下,vC1和vo幾乎不受R變化的影響,具有更好的抗擾動性能。
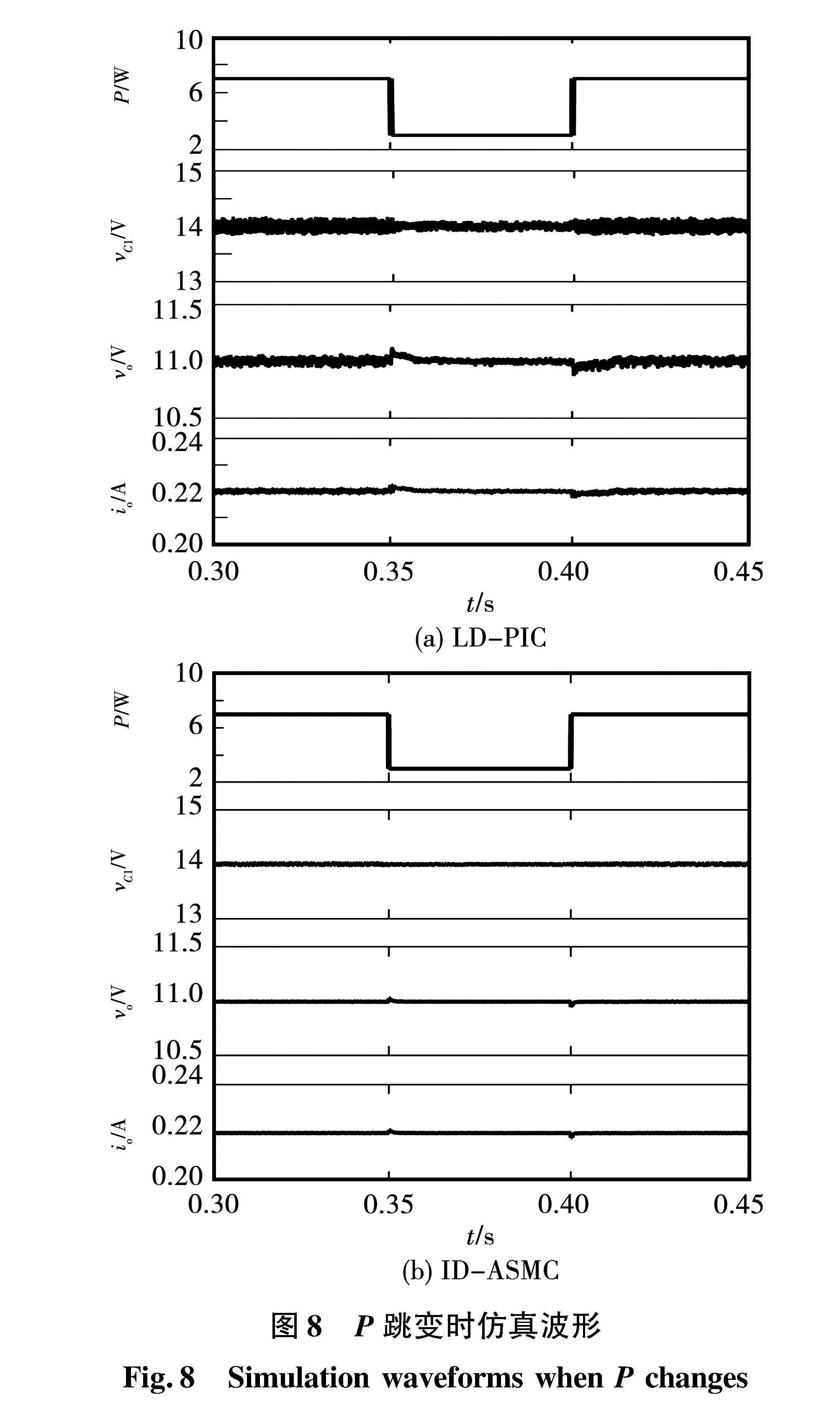
圖8給出了P分別于0.35 s(7 W→3 W)和0.4 s(3 W→7 W)改變時的仿真波形。當P由7 W突降至3 W時,在LD-PIC下,vC1電壓波動明顯,vo電壓波動量為0.2 V,而在ID-ASMC下,vC1和vo電壓波動不明顯,抑制CPL負阻抗特性的效果更佳,具有更強的魯棒性能。
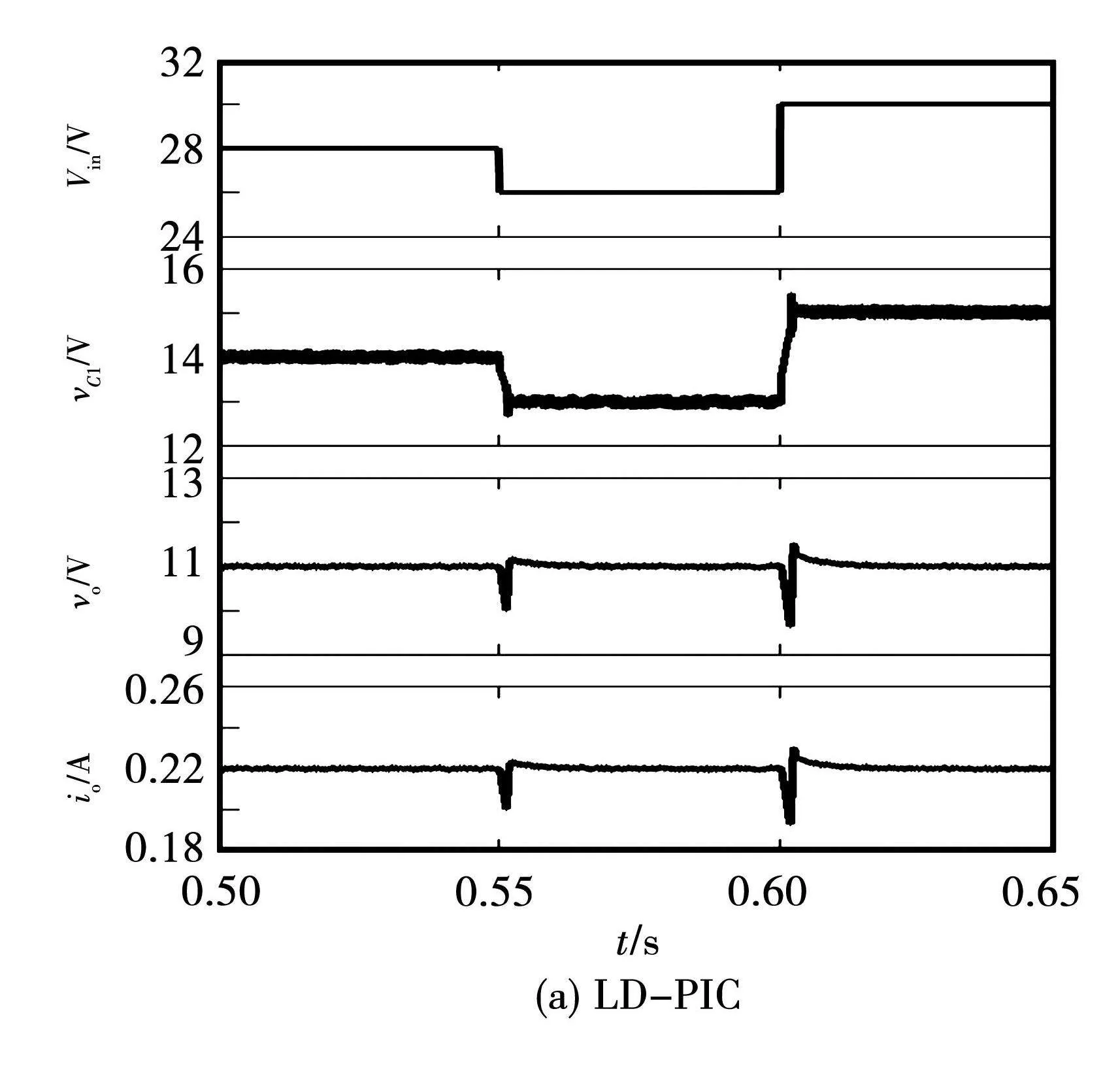
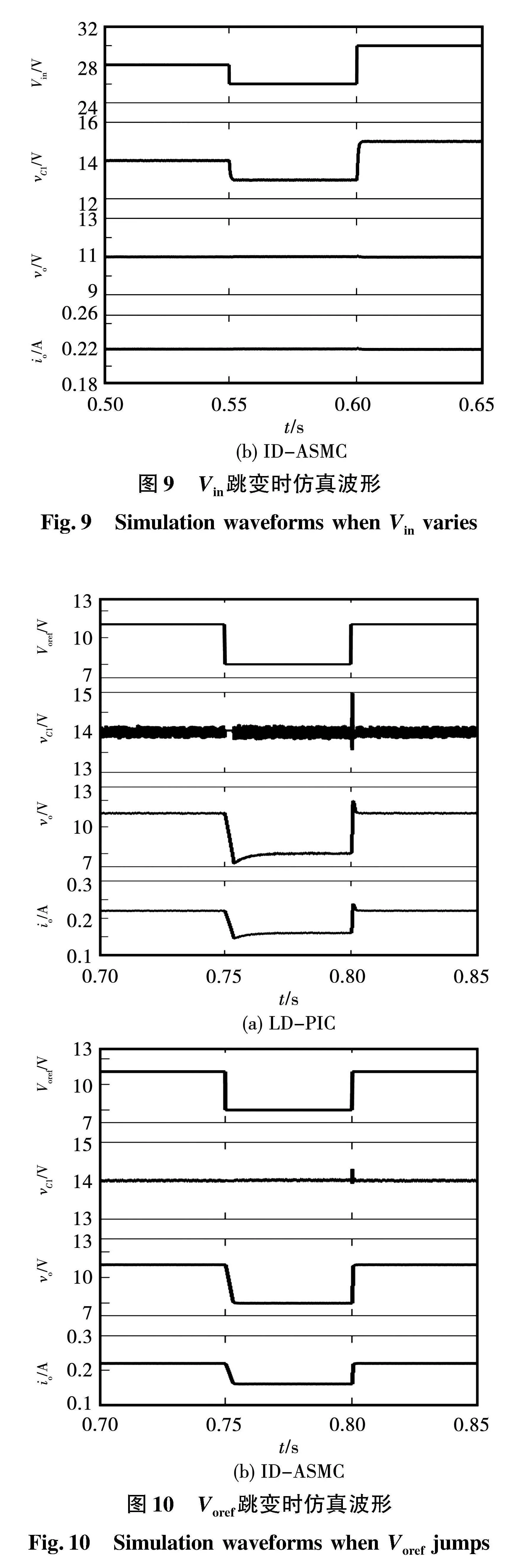
圖9給出了Vin分別于0.55 s(28 V→26 V)和0.6 s(26 V→30 V)跳變時的仿真波形。當Vin由26 V突升至30 V時,在LD-PIC下,vC1由13 V上升至15 V,均平衡于Vin/2,但存在0.4 V的電壓超調,vo出現1.8V的電壓波動;在ID-ASMC下,vC1能無超調地由13 V過渡至15 V,vo無明顯電壓變化,具有更好的解耦效果。
圖10給出了Voref分別于0.75 s (11 V→8 V)和0.8 s(8 V→11 V)變化時的仿真波形。當Voref由8 V突升至11 V時,在LD-PIC下,vC1和vo均存在電壓過沖,其值分別為1 V和1.3 V,而在ID-ASMC下,vC1僅存在0.2 V的電壓波動,vo能平滑地由8 V躍變至11 V,表現出更好的解耦性能。
5" 實驗結果
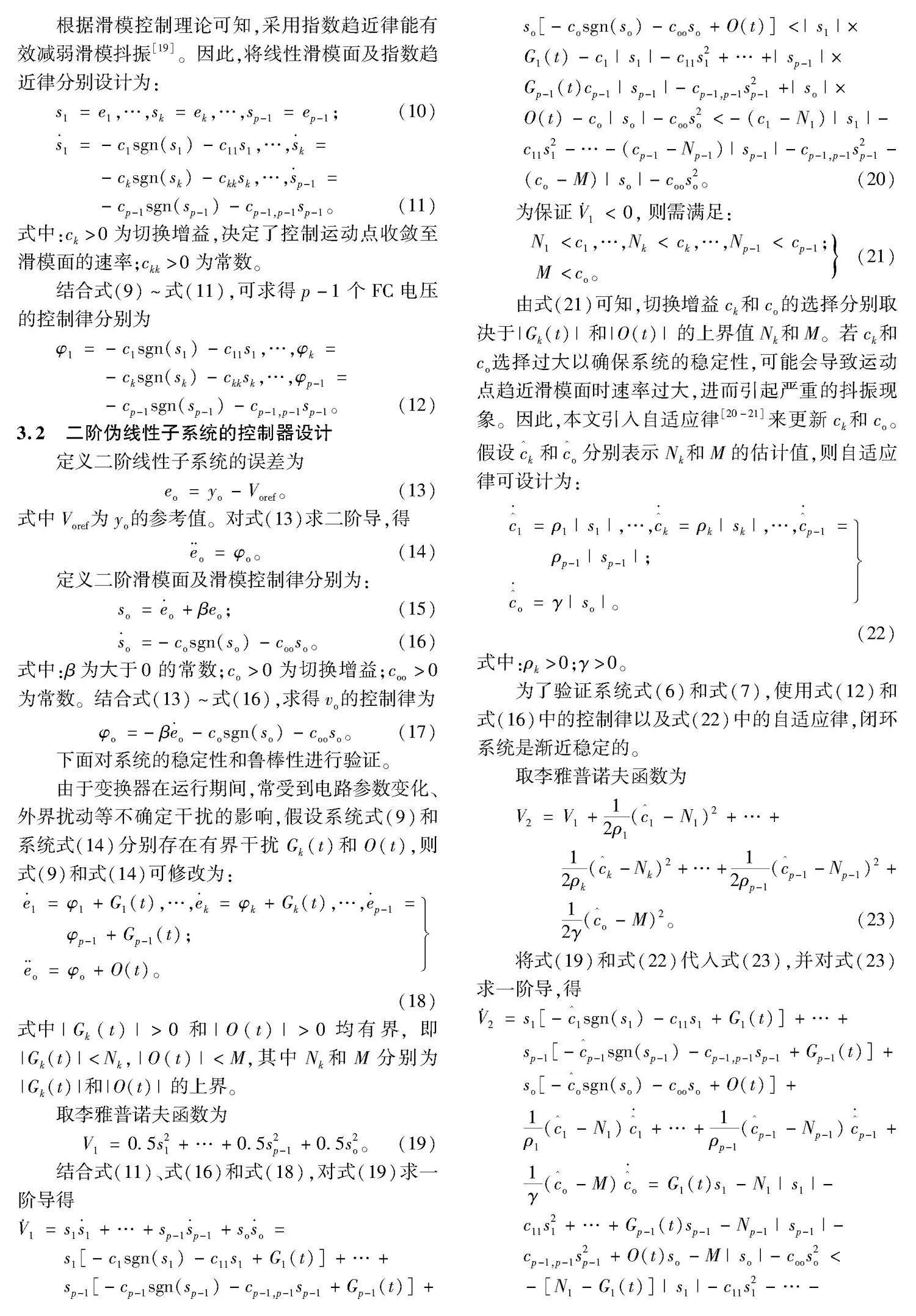
為了驗證所提控制策略的正確性,搭建了一臺與仿真參數一致的帶CPL三電平Buck變換器原理樣機,如圖11所示。該樣機由一個直流電子負載來設定CPL,采用TMS320F2812數字信號處理器(DSP2812)作為主控板,選用IRF840和TLP250分別用作開關管和驅動電路。系統采用CHB-25NP傳感器和CHV-25P傳感器分別對電流、電壓進行采樣,并通過DSP2812的12位模/數轉換器進行數據轉換。同時,所提控制策略的實驗結果與LD-PIC方法進行比較。
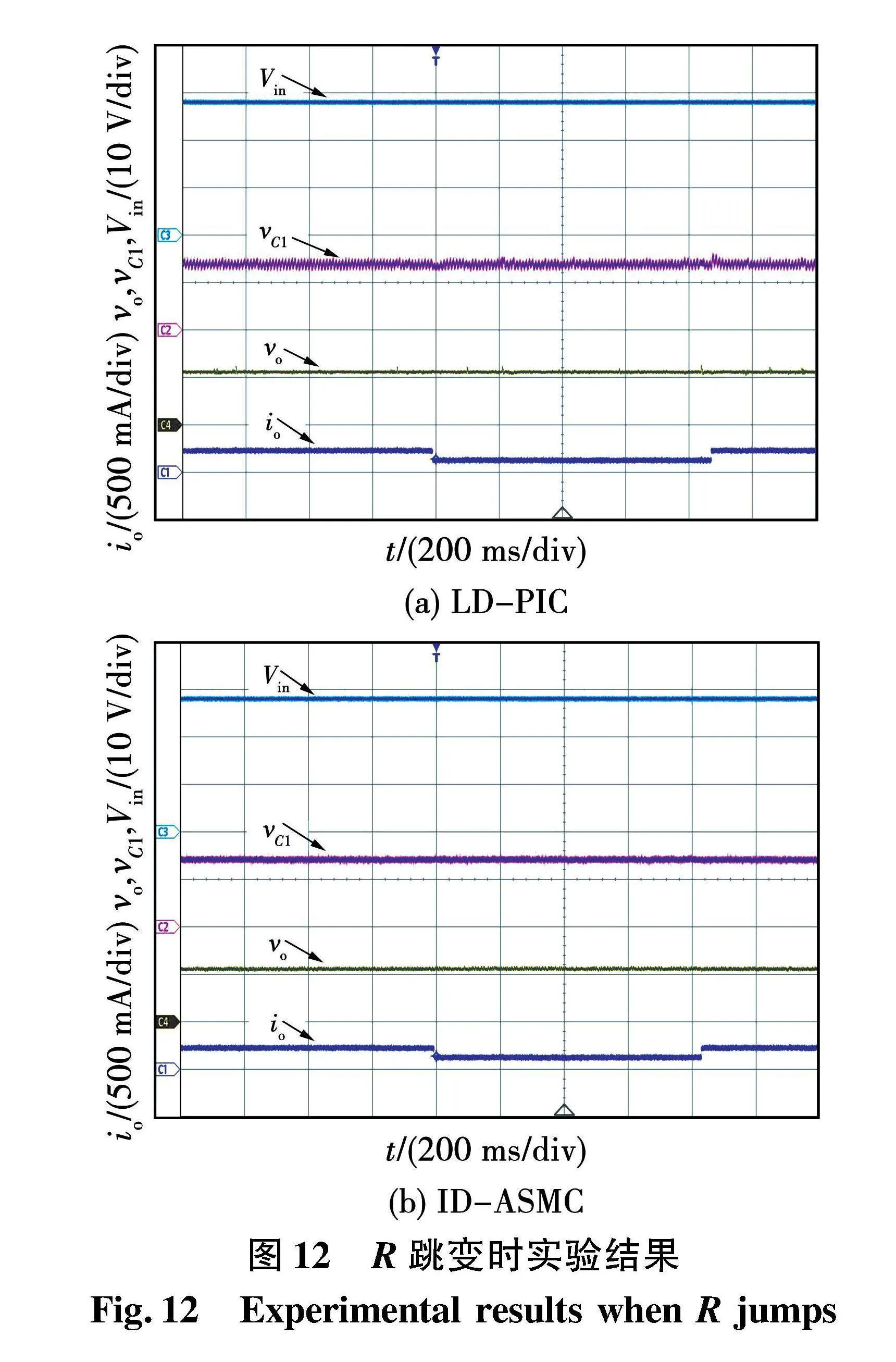
圖12給出了與圖7跳變過程一致的R跳變實驗結果。由圖12可知,vo穩定于11 V,vC1平衡于14 V,即Vin/2。當R由100 Ω跳變至50 Ω時,在LD-PIC下,vC1和vo均存在電壓波動,其波動量分別為2.3 V和2.1 V,而在ID-ASMC下,vC1和vo幾乎不受R變化的影響,表現出更強的抑制阻性負載擾動能力。
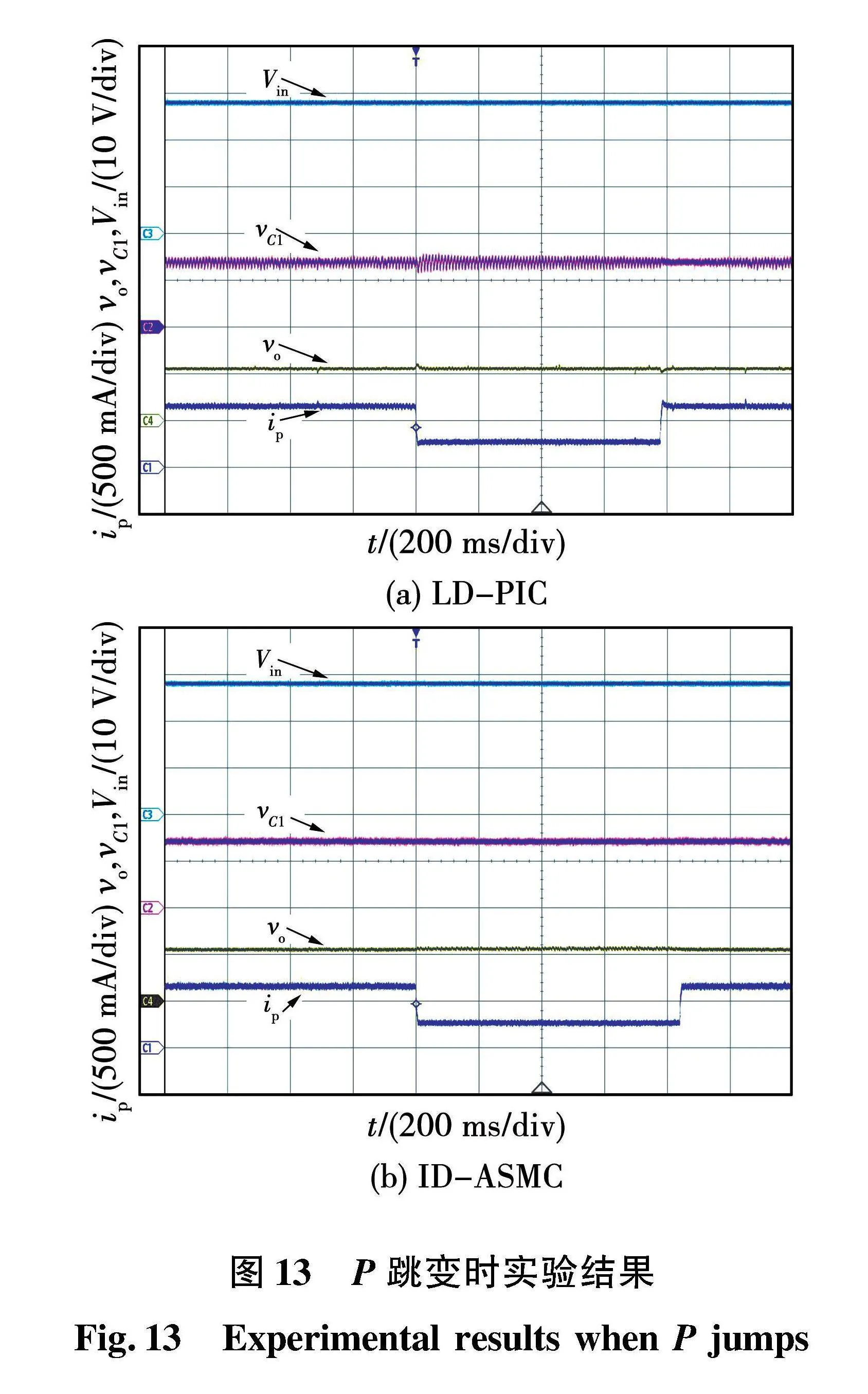
圖13給出了與圖8跳變過程一致的P改變時實驗結果。當P由7 W突降至3 W時,在ID-PIC下,vC1經過嚴重振蕩后平衡于14 V,其電壓峰峰值為3 V,vo存在1.5 V的電壓波動;而在ID-ASMC下,vC1和vo受P變化影響極小,能有效抑制CPL負阻抗特性對系統的影響,表現出更強的魯棒性能。
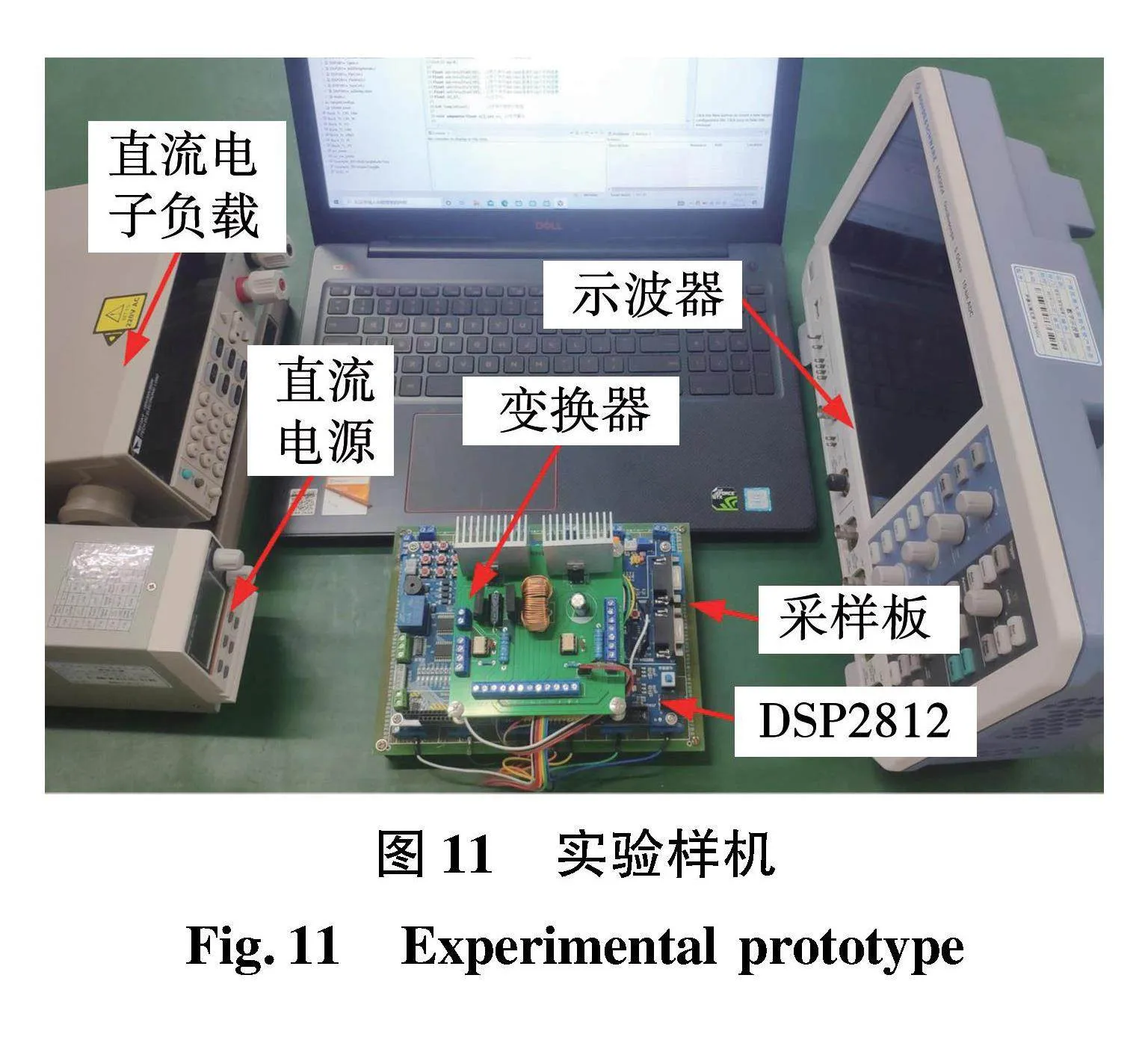
圖14給出了與圖9跳變過程一致的Vin變化時實驗結果。由圖可知,vC1平衡于Vin / 2,vo穩定于11 V。當Vin由26 V變化至30 V時,在ID-PIC下,vC1存在3.3 V的電壓超調,經振蕩衰減后穩定于15 V,vo存在一定的波動,但ID-ASMC較ID-PIC具有更好的控制效果,vC1能無超調變化至15 V,vo受Vin變化的影響甚微,實現了vC1和vo的解耦。
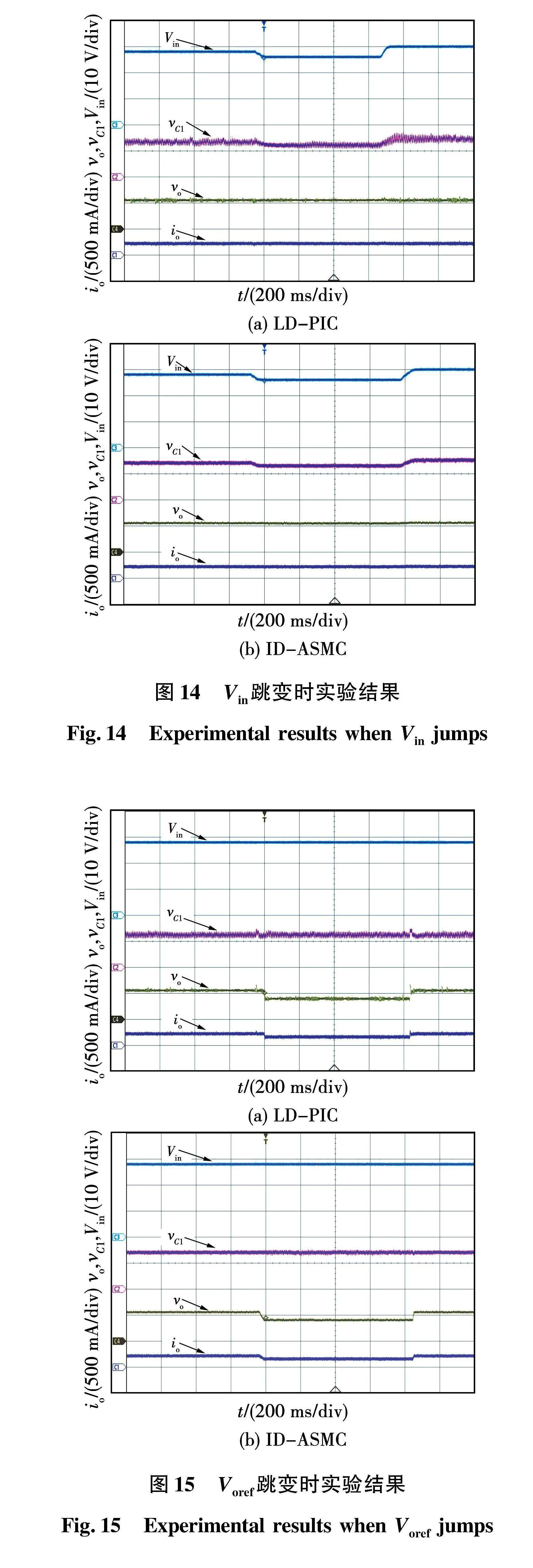
圖15給出了與圖10跳變過程一致的Voref跳變時實驗結果。當Voref由8 V變化至11 V時,在ID-PIC下,vC1和vo分別存在1.8 V和2.9 V的電壓波動,之后分別穩定于14 V和11 V,而ID-ASMC比ID-PIC具有更好的動態調節性能,vC1和vo幾乎不受Voref變化的影響,進一步驗證了vo和vC1的解耦。
然而,通過對相應的實驗波形及仿真波形進行分析比較發現,當擾動發生時,實驗結果與仿真結果存在一定的誤差,如電壓波動量不一致等。這是因為電路元器件寄生參數對實際控制系統的動態性能有影響[22],上述問題可能是由于實驗電路不可避免的元器件寄生參數所引起。
6" 結" 論
本文提出了一種逆解耦自適應滑模控制策略,解決了帶CPL多電平Buck變換器的飛跨電容電壓的平衡問題及飛跨電容電壓與輸出電壓的解耦難題,抵消了CPL負阻抗特性對系統的影響,有效提高了變換器的穩定性能。經過與LD-PIC方法分別帶CPL七電平Buck變換器、帶CPL三電平Buck變換器的仿真比較,結果表明了本文所提ID-ASMC策略具有更優越的動靜態調節性能和更好的解耦效果。最后,與LD-PIC方法帶CPL三電平Buck變換器進行實驗對比,結果表明本文所提ID-ASMC方法具有更好的控制性能和更強的魯棒性。然而,由于實驗條件的限制,難以及時對帶CPL七電平Buck變換器進行實驗驗證,該驗證工作及寄生參數對變換器的性能影響將是下一步的研究內容。同時,本文所提控制策略可推廣至其他帶CPL多電平DC-DC變換器控制應用中。
參 考 文 獻:
[1]" APPARAO D, WU Bin, RICARDO L F, et al. Evolution of topologies, modeling, control schemes, and applications of modular multilevel converters[J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2017,5(4):1631.
[2]" LING Rui, SHU Zhihui, HU Qing, et al. Second-order sliding-mode controlled three-level Buck DC-DC converters[J]. IEEE Transactions on Industrial Electronics, 2018, 65(1): 898.
[3]" WU Jiarong, LU Yimin. Decoupling and optimal control of multilevel Buck DC-DC converters with inverse system theory[J]. IEEE Transactions on Industrial Electronics,2020,67(9):7861.
[4]" DARGAHI V, SADIGH A K, CORZINE K. New flying-capacitor-based multilevel converter with optimized number of switches and capacitors controlled with a new logic-form-equation based active voltage balancing technique[C]//2016 IEEE Applied Power Electronics Conference and Exposition, March 20-24, 2016, Long Beach, CA, USA. 2016: 1481-1488.
[5]" 馮穎盈, 阮新波.多電平Buck變換器的解耦控制與閉環設計[J]. 中國電機工程學報, 2007, 27(10): 106.
FENG Yingying, RUAN Xinbo.Decoupling control and closed-loop design of Buck multi-level converter[J]. Proceedings of the CSEE, 2007, 27(10): 106.
[6]" STALA R. The switch-mode flying-capacitor DC-DC converters with improved natural balancing[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1369.
[7]" DELMAS L, GATEAU G, MEYNARD T A, et al. Stacked multicell converter: control and natural balancing[C]//2002 IEEE 33rd Annual Power Electronics Specialists Conference, June 23-27, 2002, Cairns, QLD, Australia. 2002: 689-694.
[8]" 張元媛, 阮新波.多電平直流變換器中飛跨電容電壓的一種控制策略[J]. 中國電機工程學報, 2004, 24(8): 38.
ZHANG Yuanyuan, RUAN Xinbo.A novel control strategy for the flying capacitor voltage of the multilevel converter[J]. Proceedings of the CSEE, 2004, 24(8): 38.
[9]" SUN R Y, WU X H, LI W L, et al.Equivalent sliding mode control for multi-level buck converter[C]//2016 IEEE International Conference on Aircraft Utility Systems, October 10-12, 2016, Beijing, China. 2016: 460-465.
[10]" CAI Pei, WU Xiaohua, SUN Runyu. Exact feedback linearization of general four-level buck DC-DC converters[C]//2017 29th Chinese Control and Decision Conference, May 28-30, 2017, Chongqing, China. 2017: 4638-4643.
[11]" 邵冰冰, 趙書強, 高本鋒, 等. 基于反饋線性化滑模控制的直驅風電場經柔直并網系統次同步振蕩抑制策略[J]. 中國電機工程學報, 2021, 41(9): 3093.
SHAO Bingbing, ZHAO Shuqiang, GAO Benfeng, et al.Sub-synchronous oscillation mitigation strategy of direct-drive wind farms via VSC-HVDC system based on feedback linearization sliding mode control[J]. Proceedings of the CSEE, 2021, 41(9): 3093.
[12]" 劉宇博, 王旭東. 電動汽車車載電源LLC諧振變換器滑模控制[J]. 電機與控制學報, 2020, 24(3): 133.
LIU Yubo, WANG Xudong. Sliding mode control of LLC resonant converter for electric vehicle power supply[J]. Electric Machines and Control, 2020, 24(3): 133.
[13]" WU Jiarong, LU Yimin. Adaptive backstepping sliding mode control for Boost converter with constant power load[J]. IEEE Access, 2019,7: 50797.
[14]" 游逍遙, 劉和平, 苗軼如, 等. 帶恒功率負載的雙極性直流系統穩定性分析及其有源阻尼方法[J]. 電工技術學報, 2022, 37(4): 925.
YOU Xiaoyao, LIU Heping, MIAO Yiru, et al. Stability analysis and active damping method of the bipolar DC system with constant power loads[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 925.
[15]" HASSAN M A, SU C L, CHEN F Z, et al.Adaptive passivity-based control of a DC-DC Boost power converter supplying constant power and constant voltage loads[J]. IEEE Transactions on Industrial Electronics, 2022, 69(6): 6204.
[16]" MARTNEZ-TREVIO B A, AROUDI A E, VALDERRAMA BLAVI H, et al. PWM nonlinear control with load power estimation for output voltage regulation of a Boost converter with constant power load[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 2143.
[17]" 陳曉芩,周東華,陳茂銀.基于逆系統方法的DGMSCMG框架伺服系統解耦控制研究[J].自動化學報,2013,39(5):505.
CHEN Xiaocen, ZHOU Donghua, CHEN Maoyin. Decoupling control of gimbal servo system of DGMSCMG based on dynamic inverse system method[J]. Acta Automatica Sininca, 2013, 39(5): 505.
[18]" 朱熀秋, 顧志偉. 基于模糊神經網絡逆系統的五自由度無軸承永磁同步電機自抗擾控制[J]. 電機與控制學報, 2021, 25(2): 74.
ZHU Huangqiu, GU Zhiwei. Active disturbance rejection control for 5-degree-of-freedom bearingless permanent magnet synchronous motor based on inverse system using the fuzzy neural network[J]. Electric Machines and Control, 2021, 25(2): 74.
[19]" SINGH S, KUMAR V, FULWANI D. Mitigation of destabilising effect of CPLs in island DC micro-grid using non-linear control[J]. IET Power Electronics, 2017, 10(3): 387.
[20]" BARABONES O, ALKORTA P, GARRIDO A J. An adaptive sliding mode control scheme for induction motor drives[J]. International Journal of Circuits, Systems and Signal Processing, 2007, 1(1): 73.
[21]" 趙希梅, 王晨光.永磁直線同步電機的自適應增量滑模控制[J]. 電工技術學報, 2017, 32(11) : 114.
ZHAO Ximei, WANG Chenguang. Adaptive incremental sliding mode control for permanent magnet linear synchronous motor[J].Transactions of China Electrotechnical Society,2017,32(11):114.
[22]" REATTI A, CORTI F, TESI A, et al. Effect of parasitic components on dynamic performance of power stages of DC-DC PWM Buck and Boost converters in CCM [C]//2019 IEEE International Symposium on Circuits and Systems, May 26-29, 2019, Sapporo, Japan. 2019: 1-5.
(編輯:邱赫男)