永磁同步電機新型模型預測電流控制
2024-06-30 00:00:00顏朝斌楊公德楊明發
電機與控制學報 2024年5期
關鍵詞:永磁同步電機




摘 要:為降低傳統多矢量模型預測電流控制(MPCC)算法的計算量和復雜度,并保證良好的控制性能,提出了快速篩選第二電壓矢量的新型多矢量MPCC算法。根據電流無差拍控制原則,通過直交軸電流差值定義直交軸電流判定因數,簡化了第二電壓矢量選擇過程,減輕了控制芯片的計算量,并保持了低電流脈動的優勢。在新型雙矢量MPCC算法基礎上,提出了結合直交軸電流判定因數和有效電壓矢量表用以直接選擇第二電壓矢量的新型三矢量MPCC算法。實驗結果表明,新型多矢量MPCC算法在保持傳統多矢量MPCC算法控制性能的同時,新型雙矢量MPCC算法的計算量減少33.96%,新型三矢量MPCC算法的計算量減少48.7%。
關鍵詞:永磁同步電機;模型預測電流控制;電流判定因數;雙矢量;三矢量;計算復雜度
DOI:10.15938/j.emc.2024.05.000
中圖分類號:TM351文獻標志碼:A
Research on new model predictive current control of permanent magnet synchronous motor
YAN Chaobin, YANG Gongde, YANG Mingfa
(1.College of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350108, China;2.Fujian Key Laboratory of New Energy Generation and Power Conversion, Fuzhou 350108, China)
Abstract:To reduce the computation and complexity of traditional multi-vector model predictive current control (MPCC) algorithm and ensure good control performance, a novel multi-vector MPCC algorithm is proposed to quickly screen the second voltage vector. According to the principle of current non-differential beat control, the d and q-axis current decision factors are defined by the d and q-axis current difference, which simplifies the selection process of the second voltage vector, reduces the calculation of the control chip, and maintains the advantage of low current ripple. On the basis of the new two-vector MPCC algorithm, a novel three-vector MPCC algorithm combining the d and q-axis current decision factors and the effective voltage vector table to directly select the second voltage vector is proposed. Experimental results are presented showing that the new multi-vector MPCC algorithm maintains the control performance of the traditional multi-vector MPCC algorithm while the computation of the new two-vector MPCC algorithm is reduced by 33.96% and the computation of the new three-vector MPCC algorithm is reduced by 48.7%.
Keywords:permanent magnet synchronous motor; model predictive current control; current decision factors; two-vector; three-vector; computational complexity
0 引 言
由于高效率、高功率密度和控制特性良好等優點,永磁同步電機(permanent magnet synchronous motor,PMSM)已廣泛應用于電動汽車、風力發電和家用電器等領域[1-2]。模型預測電流控制(model predictive current control, MPCC)因無需坐標變換,也無需電流內環及其參數整定,具有結構簡單、動態響應快、容易處理系統非線性約束等優點,在PMSM驅動控制領域獲得了眾多學者的青睞[3-4]。
傳統單矢量MPCC(one-vector-based MPCC,ONE-MPCC)算法具有結構簡單、動態響應快等特點。但ONE-MPCC算法在一個采樣周期內僅輸出一個幅值和方向固定的基本電壓矢量,導致PMSM在穩態運行時存在較大的電流波動[5]。為改善永磁同步電機控制效果,MPCC逐漸發展為在一個采樣周期輸出多個電壓矢量的多矢量MPCC,如雙矢量MPCC(two-vector-based MPCC,TWO-MPCC)算法和三矢量MPCC(three-vector-based MPCC,THREE-MPCC)算法[6]。文獻[7-8]將選取的最優電壓矢量與零電壓矢量進行電流無差拍調制,形成一種基于最優占空比的預測電流控制。文獻[9-10]在每一個采樣周期中進行兩次電壓矢量選擇,第二電壓矢量可選擇有效電壓矢量與零電壓矢量。文獻[11]在每個扇區用三個基本電壓矢量等效合成一個期望電壓矢量,該方法合成的期望電壓矢量覆蓋了任意方向與任意幅值。文獻[12]以減小電流誤差為選取原則,通過判斷第一最優電壓矢量產生預測電流值與參考電流值間的誤差矢量所處扇區編號來確定第二最優電壓矢量。在文獻[10]的基礎上,文獻[13]選擇第二個電壓矢量時對所有可選電壓矢量進行遍歷尋優,擴大了備選電壓矢量的覆蓋范圍。
MPCC一般通過遍歷所有電壓矢量來選擇最優電壓矢量,增加了控制系統的計算量和復雜度,特別是候選電壓矢量較多時會顯著增加控制芯片的計算負擔。為滿足更高開關頻率需求,需降低控制算法的執行時間,從而提高數字控制電路的控制頻率[14]。文獻[15]設計一種新型開關表,從開關表中選擇兩個有效電壓矢量。文獻[16]利用磁鏈矢量誤差的位置優化控制集,減少所需評估電壓矢量的個數。文獻[17]通過分析電壓矢量選擇過程,經過一次預測即可篩選最優電壓矢量,降低了算法的計算量和復雜度。文獻[18]將選取的第一個電壓矢量作用結果與無差拍原理計算的磁鏈參考值進行比較,將兩者的差值作為第二個電壓矢量選擇的標準。文獻[19]通過代價函數預測和評價三個不相鄰的有效電壓矢量,根據三個代價函數值的關系,確定兩個有效電壓矢量。文獻[20]根據微處理器多核心獨立運行特點,通過并行計算方式降低算法執行時間。
本文在現有MPCC相關文獻研究的基礎上,從降低MPCC算法的計算量和復雜度,并保證良好控制性能的角度出發,提出基于直交軸差值判定因數快速篩選電壓矢量的新型多矢量模型預測電流控制。根據直交軸電流無差拍控制原則,定義直交電流判定因數來簡化多矢量MPCC中有效電壓矢量的選擇過程。仿真和實驗結果驗證了本文所提控制策略的有效性和可行性。
1 PMSM的MPCC原理
1.1 PMSM離散數學模型
在同步旋轉坐標系下,PMSM的定子電流狀態方程為:
若λQilt;0,Qopt和Qi異號,表明uopt和ui的矢量組合滿足系統交軸電流無差拍控制要求。若λDilt;0,表明uopt和ui的矢量組合滿足系統直軸電流無差拍控制要求。在多個有效電壓矢量均能滿足交軸電流無差拍控制情況下,需加入直軸電流判定因數λD進一步選取第二最優電壓矢量uopt2。
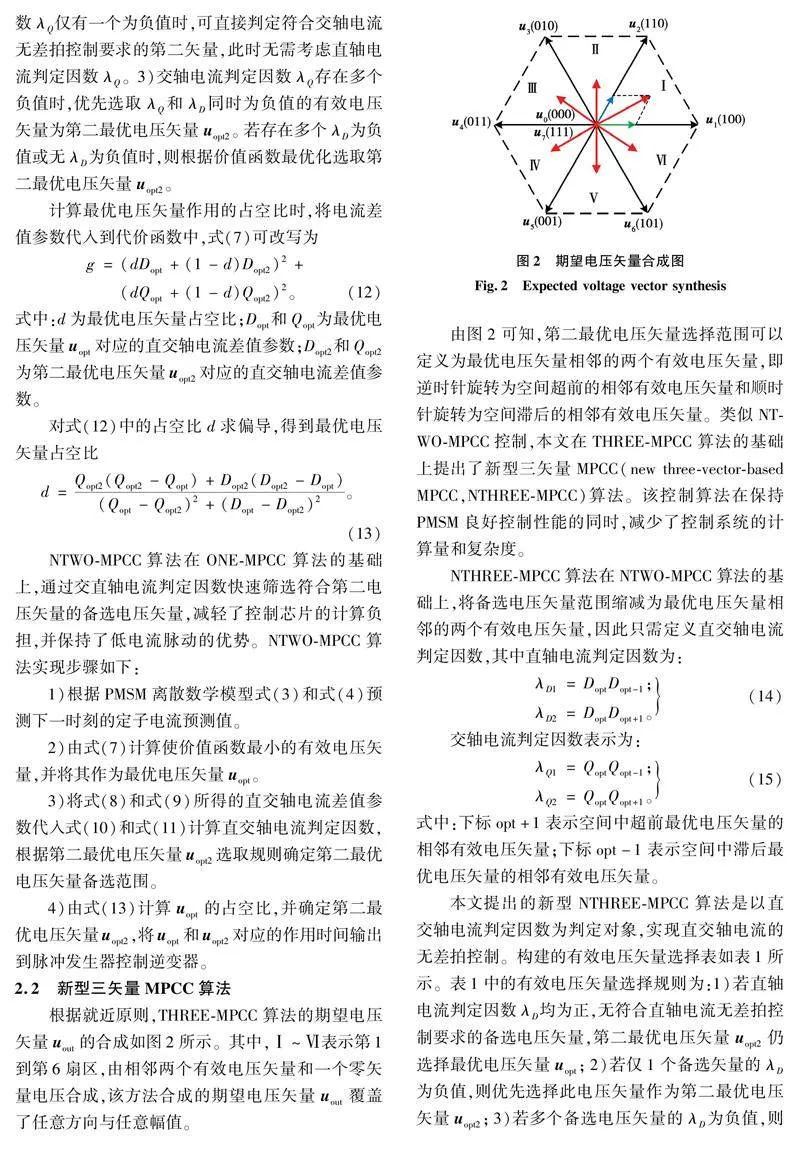
第二最優電壓矢量uopt2選取規則如下:①交軸電流判定因數λQ均為正時,沒有符合交軸電流無差拍控制要求的備選電壓矢量,第二最優電壓矢量uopt2仍選擇最優電壓矢量uopt。②交軸電流判定因數λQ僅有一個為負值時,可直接判定符合交軸電流無差拍控制要求的第二矢量,此時無需考慮直軸電流判定因數λQ。③交軸電流判定因數λQ存在多個負值時,優先選取λQ和λD同時為負值的有效電壓矢量為第二最優電壓矢量uopt2。若存在多個λD為負值或無λD為負值時,則根據價值函數最優化選取第二最優電壓矢量uopt2。
式中:下標opt+1表示空間中超前最優電壓矢量的相鄰有效電壓矢量,下標opt-1表示空間中滯后最優電壓矢量的相鄰有效電壓矢量。
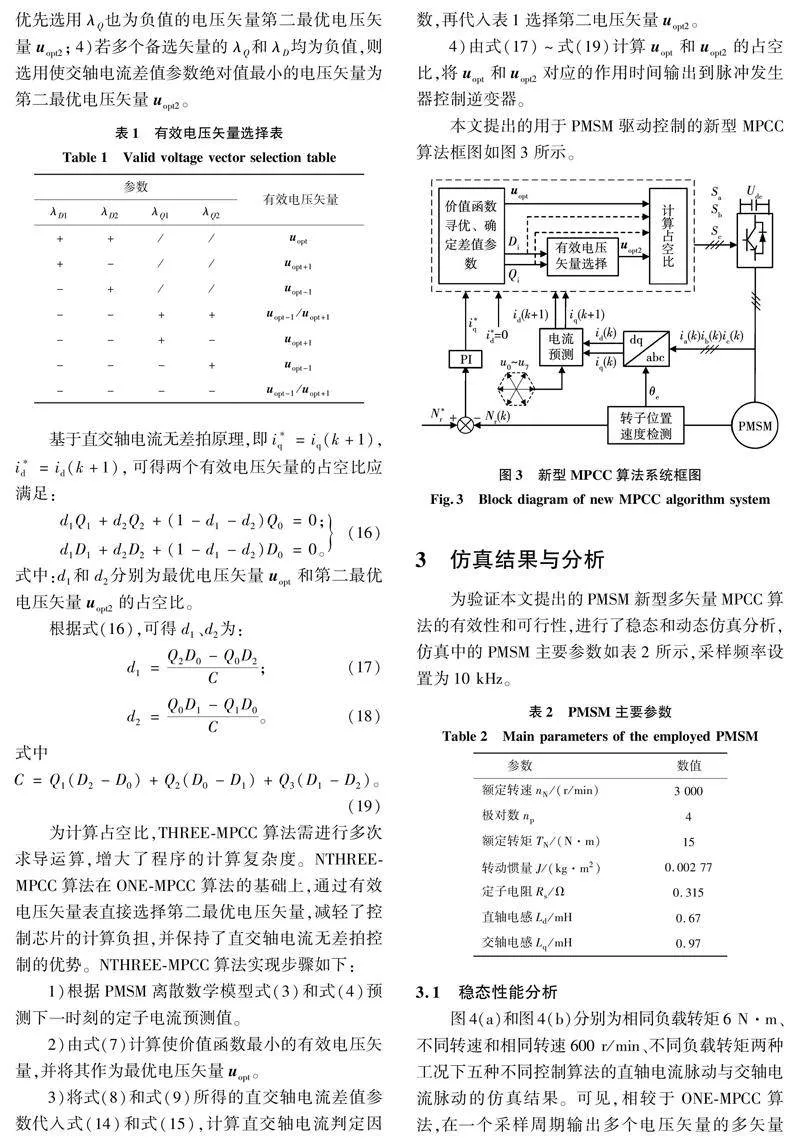
本文提出的新型NTHREE-MPCC算法是以直交軸電流判定因數為判定對象,實現直交軸電流的無差拍控制。構建的有效電壓矢量選擇表如表1所示。表1中的有效電壓矢量選擇規則為:①若直軸電流判定因數λD均為正,無符合直軸電流無差拍控制要求的備選電壓矢量,第二最優電壓矢量uopt2仍選擇最優電壓矢量uopt;②若僅1個備選矢量的λD為負值,則優先選擇此電壓矢量作為第二最優電壓矢量uopt2;③若多個備選電壓矢量的λD為負值,則優先選用λQ也為負值的電壓矢量第二最優電壓矢量uopt2;④若多個備選矢量的λQ和λD均為負值,則選用使交軸電流差值參數絕對值最小的電壓矢量為第二最優電壓矢量uopt2。
為計算占空比,THREE-MPCC算法需進行多次求導運算,增大了程序的計算復雜度。NTHREE-MPCC算法在ONE-MPCC算法的基礎上,通過有效電壓矢量表直接選擇第二最優電壓矢量,減輕了控制芯片的計算負擔,并保持了直交軸電流無差拍控制的優勢。NTHREE-MPCC算法實現步驟如下:
1)根據PMSM離散數學模型式(3)和式(4)預測下一時刻的定子電流預測值。
2)由式(7)計算使價值函數最小的有效電壓矢量,并將其作為最優電壓矢量uopt。
3)將式(8)和式(9)所得的直交軸電流差值參數代入式(14)和式(15),計算直交軸電流判定因數,再代入表1選擇第二電壓矢量uopt2。
4)由式(17)~式(19)計算uopt和uopt2的占空比,將uopt和uopt2對應的作用時間輸出到脈沖發生器控制逆變器。
本文提出的用于PMSM驅動控制的新型MPCC算法框圖如圖3所示。
3 仿真結果與分析
為驗證本文提出的PMSM新型多矢量MPCC算法的有效性和可行性,進行了穩態和動態仿真分析,仿真中的PMSM主要參數如表2所示,采樣頻率設置為10 kHz。
3.1 穩態性能分析
圖4(a)和圖4(b)分別為相同負載轉矩6 N·m、不同轉速和相同轉速600 r/min、不同負載轉矩兩種工況下五種不同控制算法的直軸電流脈動與交軸電流脈動的仿真結果。可見,相較于ONE-MPCC算法,在一個采樣周期輸出多個電壓矢量的多矢量MPCC算法均能有效降低直交軸電流脈動。NTWO-MPCC算法改進了占空比的計算方法,在兩種工況下交軸電流脈動雖大于TWO-MPCC算法,但直軸電流脈動低于TWO-MPCC算法。在5種MPCC控制算法中,NTHREE-MPCC算法與THREE-MPCC算法的直軸電流脈動和交軸電流脈動均最小,且脈動值幾乎相同。
圖4(c)和圖4(d)分別為兩種工況下的定子相電流THD分析結果。可見,NTWO-MPCC算法由于占空比計算的優化在兩種工況下的電流THD均優于TWO-MPCC算法,且在相同轉速低負載情況下更為明顯。同時,NTHREE-MPCC算法與THREE-MPCC算法控制性能最佳,定子相電流THD曲線也幾乎重合。
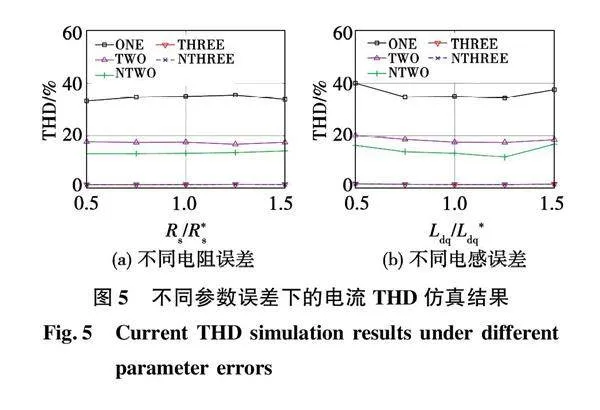
為進一步研究所提多矢量MPCC算法在不同參數誤差下的穩態性能,如圖5(a)和圖5(b)所示為不同電阻誤差(Rs/R*s)和電感誤差(Ldq/L*dq)下的電流THD仿真結果。可以看出,當電阻誤差在0.5至1.5之間對控制性能幾乎無影響,當電感誤差大于1.25或小于0.75時控制性能有較明顯的降低。
通過穩態仿真實驗,驗證了所提NTWO-MPCC算法在整體穩態性能上優于TWO-MPCC算法,所提NTHREE-MPCC算法能有效保持三矢量MPCC的控制性能優勢。
3.2 動態性能分析
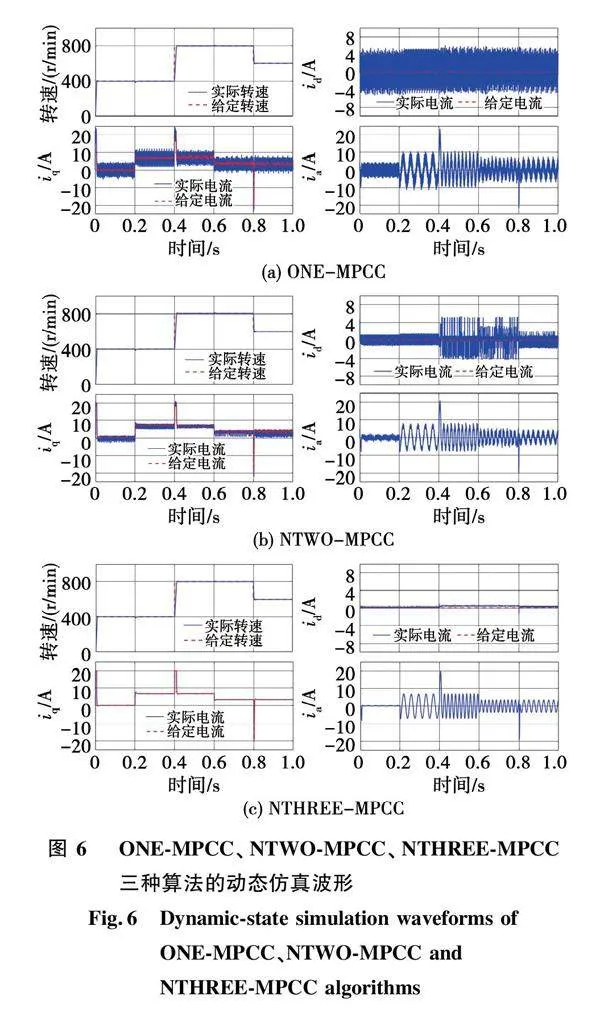
圖6給出了ONE-MPCC、NTWO-MPCC、NTHREE-MPCC三種控制算法在動態運行過程的仿真波形。
PMSM空載啟動,0 s時給定轉速400 r/min;0.2 s時突加6 N·m負載;0.4 s給定轉速增加至800 r/min;0.6 s時負載減至3 N·m運行;0.8 s給定轉速減至600 r/min。三種控制算法動態控制性能接近,均能在啟動后20 ms內達到給定轉速,且無超調,同時在加減速變化過程和加減載變化過程直交軸電流均能快速做出響應。
綜合以上仿真結果,所提NTWO-MPCC算法與TWO-MPCC算法相比,在保障控制性能的前提下具有更優的電流THD。所提NTHREE-MPCC算法與NTHREE-MPCC算法控制效果基本一致。
4 實驗結果與分析
為驗證本文所提出的PMSM新型MPCC算法的可行性與有效性。本文基于圖7所示的PMSM控制實驗平臺,對5種控制算法進行對比實驗分析。為合理比較各種MPCC算法,實驗均采用相同的轉速環PI參數,采樣頻率均設為10 kHz,所用PMSM的主要參數如表2所示。
4.1 穩態性能分析
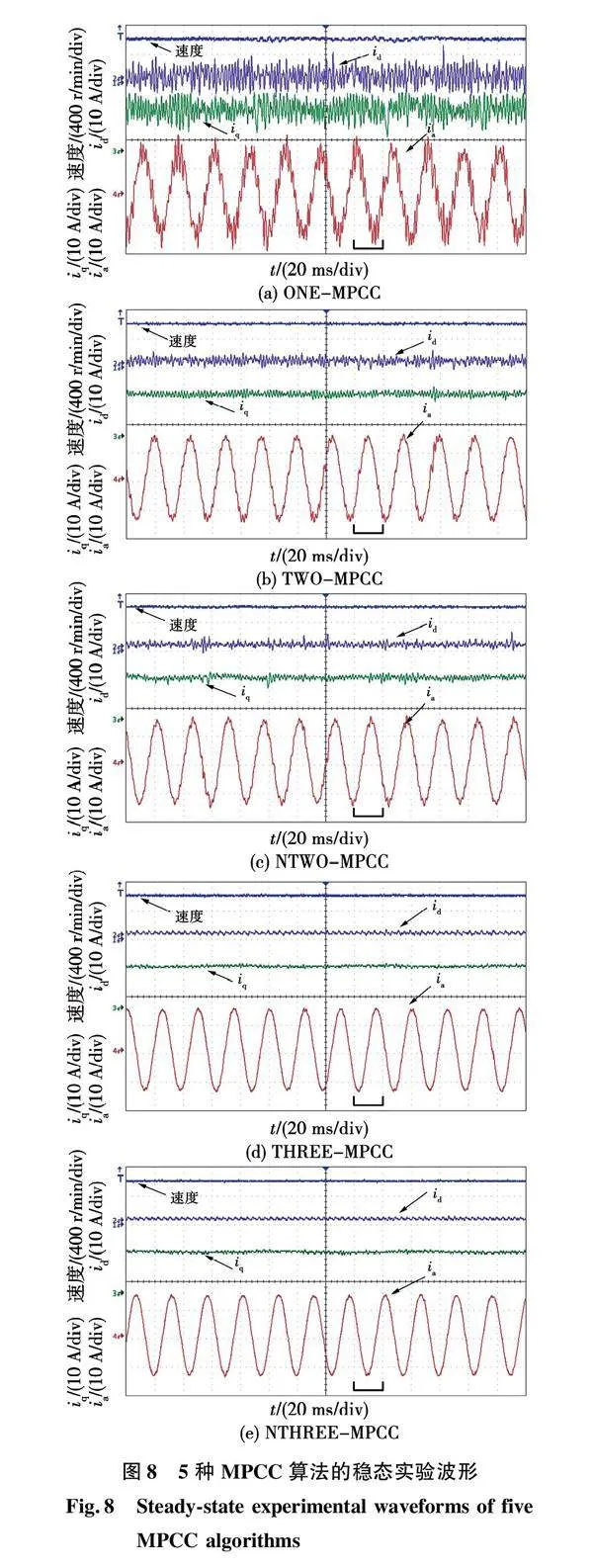
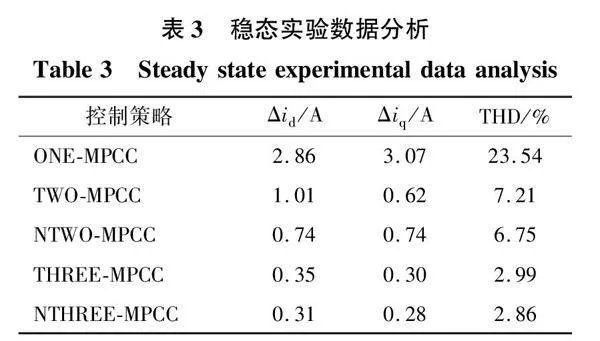
如圖8所示為5種MPCC算法在轉速為600 r/min、負載轉矩為6 N·m的工況下的穩態實驗波形。為直觀說明圖8的實驗結果,將穩態實驗數據通過示波器導出,進行直交軸電流脈動和定子相電流THD分析,結果如表3所示。
實驗結果驗證了多矢量MPCC控制能有效降低直交軸電流脈動。其中,改進占空比計算的NTWO-MPCC算法交軸電流脈動達到0.74 A高于TWO-MPCC算法的0.62 A;直軸電流脈動0.74 A低于TWO-MPCC算法的1.01 A,但從定子相電流THD可見,NTWO-MPCC算法具有比TWO-MPCC算法更佳的控制效果。在五種MPCC算法中,NTHREE-MPCC算法與THREE-MPCC算法的控制性能最佳,且直交軸電流脈動幾乎相同,定子相電流THD也幾乎相同,通過實驗驗證了所提NTHREE-MPCC算法有效保持了THREE-MPCC算法的控制性能。
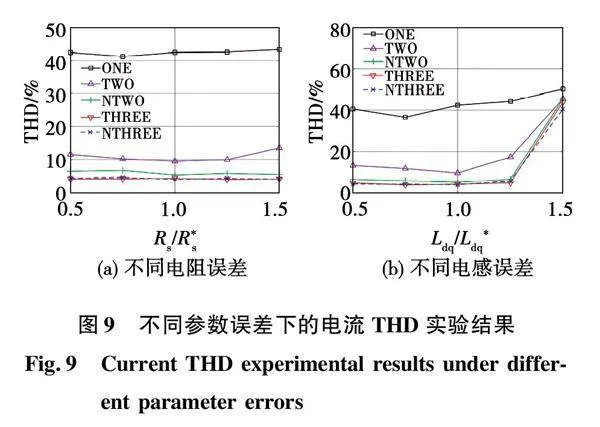
進一步研究所提MPCC算法在不同參數誤差下的穩態性能,如圖9(a)和圖9(b)所示為不同電阻誤差(Rs/R*s)和電感誤差(Ldq/L*dq)下的電流THD實驗結果。可以看出,電阻誤差對各種算法的控制性能影響較小,當電感誤差大于1.25時控制性能明顯降低。同時,從五種控制算法的控制結果可看出參數有誤差下的穩態性能和參數無誤差下的穩態性能的變化規律一致。
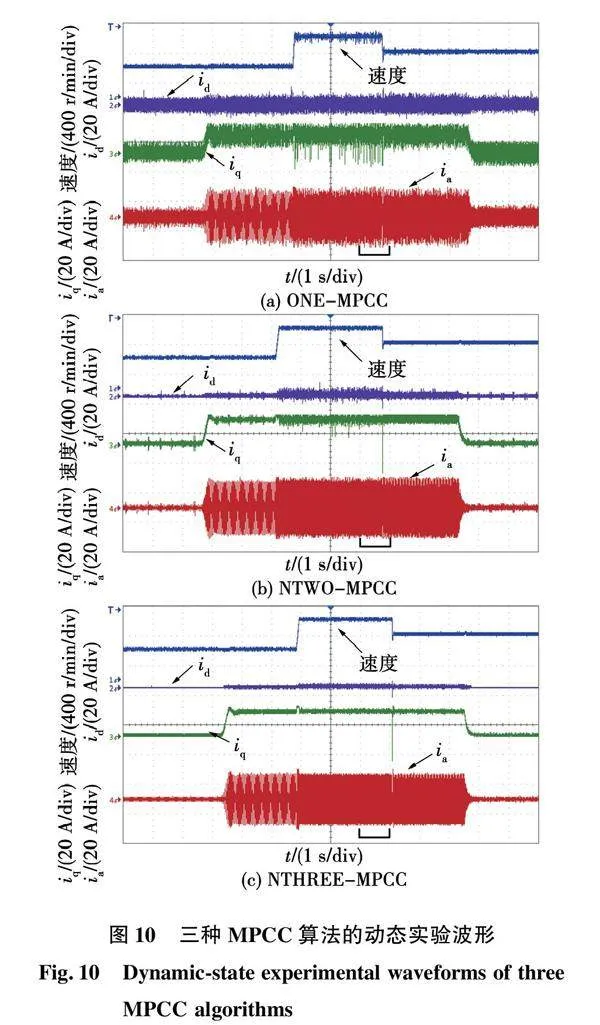
4.2 動態性能分析
圖10給出了ONE-MPCC、NTWO-MPCC及NTHREE-MPCC三種控制算法在動態運行過程中的實驗波形。實驗條件設置為:PMSM空載啟動,初始轉速為400 r/min,穩定運行一段時間后,將負載增至6 N·m,穩定運行一段時間,將轉速增加至800 r/min,繼續穩定運行一段時間,再將轉速降至600 r/min,最后待轉速穩定后將負載降為空載。實驗結果可以看出,三種算法在轉速變化過程和負載變化過程均能快速做出響應。
綜合以上實驗結果,所提NTWO-MPCC算法在保障了TWO-MPCC算法控制性能的前提上具有更優的控制性能。所提NTHREE-MPCC算法能保持與THREE-MPCC算法相同的控制性能。
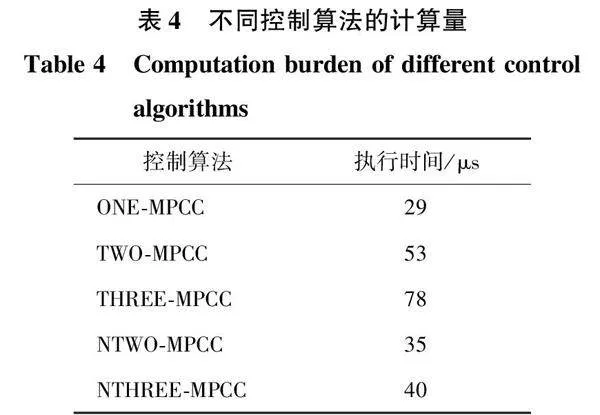
4.3 計算量比較
本文直接通過RTU-BOX控制系統中的Meter Code Time模塊獲得5種控制算法的執行時間,并將其作為計算量和復雜度的評判標準。該算法執行時間包含AD轉換程序執行時間、測速程序執行時間以及代碼實現執行時間等,通過實驗對比5種MPCC算法的計算量,見表4。
由表4可見,所提出的NTWO-MPCC算法的執行時間為35 μs,相較于TWO-MPCC算法的執行時間減小了33.96%。所提出的NTHREE-MPCC算法的執行時間為40 μs,相較于THREE-MPCC算法的執行時間優化了48.7%。結果表明,所提新型MPCC算法在保證傳統多矢量MPCC算法良好控制性能的基礎上,能有效減少多矢量MPCC算法的計算量。同時,計算量越低的控制算法可使控制系統獲得更高的開關頻率,進而獲得更優的控制性能。
5 結 論
本文針對傳統多矢量MPCC算法計算量較大的問題,提出了基于直交軸電流判定因數快速篩選第二電壓矢量的新型多矢量MPCC算法。研究結果表明,所提出的新型多矢量MPCC算法在保證傳統多矢量MPCC算法良好控制性能的基礎上,顯著降低了控制系統的計算量和復雜度。所提NTWO-MPCC算法相較于TWO-MPCC算法,計算量減少了33.96%同時優化了控制性能。所提NTHREE-MPCC算法在保持THREE-MPCC算法控制性能的同時計算量減少了48.7%。特別是隨著電力電子器件技術的不斷發展,功率開關器件允許的開關頻率不斷提高。因此,提高控制方法執行效率具有重要意義。
參 考 文 獻:
[1]DAI Ying, SONG Liwei, CUI Shumei. Development of PMSM drives for hybrid electric car applications[J].IEEE Transactions on Magnetics, 2007, 43(1): 434.
[2]章回炫, 范濤, 邊元均, 等.永磁同步電機高性能電流預測控制[J]. 電工技術學報, 2022, 37(17): 4335.
ZHANG Huixuan, FAN Tao, BIAN Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335.
[3]KAZMIERKOWSKI M P. Model predictive control of high power converters and industrial drives[J]. IEEE Industrial Electronics Magazine,2018,12(3) :55.
[4]HASSINE I M B, NAOUAR M W, MRABET B N. Model predictive-sliding mode control for three-phase grid-connected converters[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1341.
[5]陳卓易, 屈穩太. 基于PID型代價函數的永磁同步電機模型預測電流控制[J]. 電工技術學報, 2021, 36(14): 2971.
CHEN Zhuoyi, QU Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-Type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971.
[6]蘇曉楊, 蘭志勇, 蔡兵兵. 永磁同步電機模型預測電流控制比較研究[J]. 電機與控制應用, 2021, 48(10): 7.
SU Xiaoyang, LAN Zhiyong, CAI Bingbing. A comparative research of model predictive current control for permanent magnet synchronous motor[J]. Electric Machines amp; Control Application, 2021, 48(10): 7.
[7]史婷娜, 張維, 肖萌, 等. 基于矢量作用時間的永磁同步電機預測電流控制[J]. 電工技術學報, 2017, 32(19): 1-10.
SHI Tingna, ZHANG Wei, XIAO Meng, et al. Predictive current control for permanent magnet synchronous motor based on operating time of vector[J]. Transactions of China Electrotechnical Society, 2017, 32(19): 1.
[8]韓鐘輝. 永磁同步電機調速系統預測電流控制研究[D]. 中國礦業大學, 2019.
[9]徐艷平, 張保程, 周欽. 永磁同步電機雙矢量模型預測電流控制[J]. 電工技術學報, 2017, 32(20): 224.
XU Yanping, ZHANG Baocheng, ZHOU Qin. Two-vector based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(20): 224.
[10]陳榮, 翟凱淼, 舒胡平. 永磁同步電機雙矢量固定開關頻率模型預測控制研究[J].電工技術學報,2023,38(14):3812.
CHEN Rong, ZHAI Kaimiao, SHU Huping. Predictivecontrol of dual vector fixed switching frequency model for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3812.
[11]徐艷平, 王極兵, 張保程, 等. 永磁同步電機三矢量模型預測電流控制[J]. 電工技術學報, 2018, 33(5): 980.
XU Yanping, WANG Jibing, ZHANG Baocheng, et al. Three-vector-based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(5): 980.
[12]蘭志勇, 王波, 徐琛, 等. 永磁同步電機新型三矢量模型預測電流控制[J]. 中國電機工程學報, 2018, 38(S1): 243.
LAN Zhiyong, WANG Bo, XU Chen, et al. A novel three-vector model predictive current control for permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2018, 38(S1): 243.
[13]徐艷平, 王極兵, 周欽, 等. 永磁同步電動機雙優化三矢量模型預測電流控制[J]. 中國電機工程學報, 2018, 38(6): 1857.
XU Yanping, WANG Jibing, ZHOU Qin, et al. Double optimization three-vector-based model predictive current control for permanent magnet synchronous motors[J]. Proceedings of the CSEE, 2018, 38(6): 1857.
[14]賀詩明, 王亞東, 劉邦銀. 并聯逆變器變開關頻率交錯零矢量PWM方法[J].中國電機工程學報, 2022, 42(6): 2275.
HE Shiming, WANG Yadong, LIU Bangyin. Variable switching frequency interleaved zero-vector PWM scheme for paralleled inverters[J]. Proceedings of the CSEE, 2022, 42(6): 2275.
[15]李祥林, 薛志偉, 閻學雨, 等. 基于電壓矢量快速篩選的永磁同步電機三矢量模型預測轉矩控制[J]. 電工技術學報, 2022, 37(7): 1666.
LI Xianglin, XUE Zhiwei, YAN Xueyu et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1666.
[16]史涔溦, 王喆, 陳卓易, 等. 基于簡化控制集的雙三相永磁同步電機模型預測磁鏈控制[J]. 電機與控制學報, 2023, 27(3): 1.
SHI Cenwei, WANG Zhe, CHEN Zhuoyi, et al. Model predictive flux control algorithm for dual three-phase permanent magnet synchronous motor with simplified control set[J]. Electric Machines and Control, 2023, 27(3): 1.
[17]張永昌, 楊海濤, 魏香龍. 基于快速矢量選擇的永磁同步電機模型預測控制[J]. 電工技術學報, 2016, 31(6): 66.
ZHANG Yongchang, YANG Haitao, WEI Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66.
[18]葛興來, 胡曉, 孫偉鑫, 等. 永磁同步電機三矢量優化預測磁鏈控制[J]. 電機與控制學報, 2021, 25(8): 9.
GE Xinglai, HU Xiao, SUN Weixin, et al. Three vectors model predictive flux-linkage control of permanent magnet synchronous motor[J]. Electric Machines and Control, 2021, 25(8): 9.
[19]WANG Chen, JI Jinghua, TANG Hongyu, et al. Improved model predictive current control for linear vernier permanent-magnet motor with efficient voltage vectors selection[J]. IEEE Transactions on Industrial Electronics, 2023, 3(70): 2833.
[20]劉濤,習金玉,宋戰鋒,等.基于多核并行計算的永磁同步電機有限集模型預測控制策略[J].電工技術學報,2021,36(1): 107.
LIU Tao, XI Jinyu, SONG Zhanfeng, et al. Finite control set model predictivecontrol of permanent magnet synchronous motor based on multi-core parallel computing[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 107.
(編輯:劉素菊)
收稿日期: 2023-02-22
基金項目:國家自然科學基金青年基金項目(52107039);福建省自然科學青年基金項目(2021J05133)
作者簡介:顏朝斌(1998—),男,碩士研究生,研究方向為永磁同步電機預測控制技術;
楊公德(1988—),男,博士,副教授,碩士生導師,研究方向為永磁電機分析、設計與控制;
楊明發(1977—),男,博士,副教授,碩士生導師,研究方向為永磁電機控制與在線監測技術。
通信作者:楊公德
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
