基于改進型轉矩分配函數的開關磁阻電機轉矩與峰值電流優化研究
2024-06-30 00:00:00許愛德孫景浩冷冰楊洋
電機與控制學報 2024年5期

摘 要:開關磁阻電機(switched reluctance motor,SRM)使用傳統的轉矩分配函數控制時由于轉矩分配函數的開關角度恒定,使其在換相階段出現較為明顯的轉矩脈動和較高的峰值電流現象。針對這一現象,提出實時調節開關角度的指數型轉矩分配函數的控制方法來降低轉矩脈動與相峰值電流。與傳統的轉矩分配控制進行比較分析,所提算法能夠在不同電機轉速下抑制轉矩脈動和降低SRM定子繞組換相峰值電流,在中低速情況下,實時優化轉矩分配函數開關角與重疊角,提高了SRM的運行效率。以一臺2.2 kW的12/8開關磁阻電機作為控制對象,建立控制系統仿真模型,通過仿真和實驗驗證了所提算法的有效性。
關鍵詞:開關磁阻電機;轉矩分配函數;開關角度;轉矩脈動;峰值電流
DOI:10.15938/j.emc.2024.05.000
中圖分類號:TM352文獻標志碼:A
Optimization of torque and peak current of switched reluctance motor based on improved torque sharing function
XU Aide SUN Jinghao LENG Bing YANG Yang2
(1.College of Information and Science Technology,Dalian Maritime University,Dalian 116026,China;
2.College of Marine Electrical and Engineering,Dalian Maritime University,Dalian 116026,China)
Abstract:Switched reluctance motor (SRM) uses the traditional torque sharing function control, due to the switching angle of the torque sharing function is constant, so that it has more obvious torque ripple and high peak current phenomenon in the commutation stage. In view of this phenomenon, this paper proposes a control method for the exponential torque sharing function that adjusts the switching angle in real time to reduce torque ripple and phase peak current. Compared with the traditional torque sharing control, the proposed algorithm can suppress torque ripple and reduce the commutation peak current of SRM stator winding at different motor speeds, and optimize the switching angle and overlap angle of the torque sharing function in real time under medium and low speeds, which improves the operating efficiency of SRM. A 2.2 kW 12/8 switched reluctance motor is taken as the control object, and the simulation model of the control system is established, and the effectiveness of the proposed algorithm is verified by simulation and experiments.
Keywords:switched reluctance motors; torque sharing function; switch angle; torque ripple; peak current
0 引 言
開關磁阻電機具有結構簡單、成本低、調速范圍廣、可靠性高等優勢,在電動汽車、航空航天、家用電器、重工業等領域具有重要的應用價值[1-2]。隨著時代的進步,在各個領域對電機驅動系統的效率、噪聲、轉矩脈動等指標要求越來越高。從實用角度出發,在驅動電機行業內SRM的電機特性以及其突出的優勢已經可以和其他電機相媲美,但SRM與其他類型電機相比較仍舊存在轉矩脈動大、效率低、噪聲高等一些應用局限性和不足之處有待改善提升[3-4]。
盡管SRM系統具有嚴重的非線性,導致對SRM的研究帶來挑戰。近40年來通過各界學者的努力專研,在SRM轉矩脈動最小化控制、銅損耗最小化控制、開關頻率最小化分析計算等方面已經取得了一定的進展[5-6]。在過去的幾十年中為了控制SRM在能夠產生理想額定轉矩的同時達到轉矩脈動最小化的目標。開關磁阻電機在換相重疊區間內轉矩由勵磁相和退磁相疊加而成,由于電機的勵磁相和退磁相疊加總和不穩定,造成電機輸出轉矩與額定轉矩存在差值,從而引起轉矩脈動。除了在電機本體結構優化來抑制轉矩脈動外,國內外學者還提出了多種優化控制方法來降低脈動,其中涵蓋了傳統的控制、直接轉矩控制、智能控制、預測控制、轉矩分配函數控制等。這些控制方法在轉矩脈動抑制方面具有很成功的效果,但沒有在SRM運行效率及其損耗問題上有更好的優化[7-8]。直接轉矩控制策略能夠較好地降低SRM的轉矩脈動,但控制開關管的導通規則過于復雜,將會引起更高的開關損耗和轉矩失控現象,運行效率較低[9-10]。轉矩分配函數(torque sharing function,TSF)控制的主要核心原理是設計SRM更加貼合參考轉矩的轉矩分配函數,根據電機的運行狀態來分配各相輸出的轉矩表達式,重點設計的原則是保證換相重疊區間的各相實際轉矩疊加之和等于總參考轉矩,實現勵磁相和退磁相的轉矩疊加平滑輸出。文獻[11]提出選擇不同類型的轉矩分配函數對轉矩脈動抑制與銅耗最小化綜合控制的概念。在TSF的基礎上考慮銅耗及轉矩電流比為優化目標進行研究,有效的提高了電機系統性能。文獻[12]提出根據SRM的運行狀態來隨時調節導通區間的導通時間,減小換相重疊區的導通時間,實現高效控制電機運行的目標。文獻[13]提出一種實時地把SRM的轉矩誤差轉化為一個反饋增益,將反饋增益結合李雅普諾夫函數實現轉矩誤差的快速收斂,從而更好地抑制轉矩脈動。文獻[14]所提TSF控制,根據SRM的磁鏈變化率絕對值轉化為轉矩誤差,通過PI控制補償最終實現轉矩脈動的抑制。文獻[15]中TSF控制利用不同的占比平衡原則選取最滿足設計的目標函數進行電機控制。
本文提出一種基于指數型TSF在不同轉速下實時調節轉矩分配函數開關角度的控制方法。同時考慮轉矩脈動和SRM定子繞組換相峰值電流2個問題。給出了適合電機在中低轉速下的轉矩分配函數開關角度選擇的控制方法。在MATLAB/Simulink仿真環境中將所提控制算法的結果與傳統TSF進行對比分析,驗證了所提算法能夠有效降低轉矩脈動和相電流峰值。最后,介紹了實驗平臺及SRM控制系統的詳細參數。在實驗平臺上驗證了所提算法相比于傳統轉矩分配函數控制可以實現開關磁阻電機的轉矩脈動和換相峰值電流的優化,實驗結果與仿真結果相近。
1 SRM的非線性建模
本文選用一臺三相12/8極SRM作為控制研究對象,開關磁阻電機的驅動系統的幾個重要部分包括功率變換器、開關磁阻電機、控制器、控制電路以及反饋系統的電壓電流檢測電路。圖1為SRM功率變換器的不對稱半橋拓撲結構。
SRM的存在相間耦合以及系統的高度非線性,導致其精確數學模型建立較為困難。為了反映SRM復雜的電磁關系,以k相為例,SRM靜止參照系中電壓平衡方程如下:
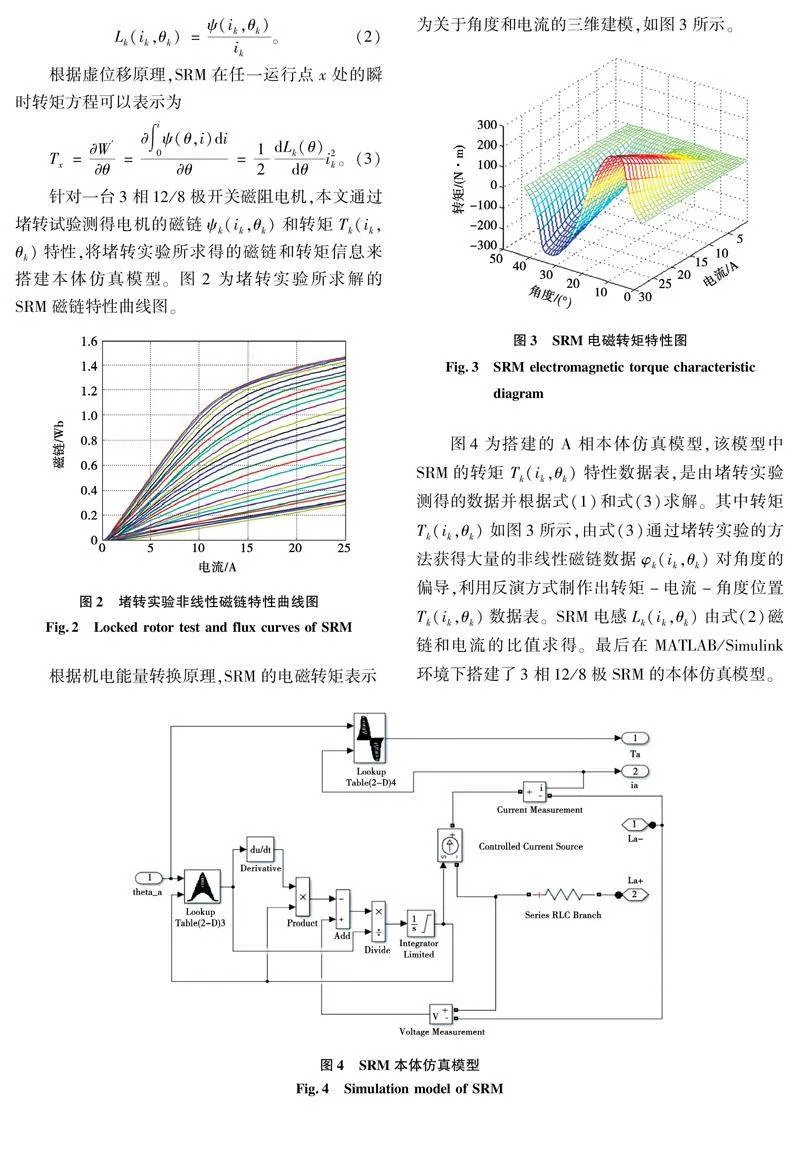
針對一臺3相12/8極開關磁阻電機,本文通過堵轉試驗測得電機的磁鏈ψk(ik,θk)和轉矩Tk(ik,θk)特性,將堵轉實驗所求得的磁鏈和轉矩信息來搭建本體仿真模型。圖2為堵轉實驗所求解的SRM磁鏈特性曲線圖。
根據機電能量轉換原理,SRM的電磁轉矩表示為關于角度和電流的三維建模,如圖3所示。
圖4為搭建的A相本體仿真模型,該模型中SRM的轉矩Tk(ik,θk)特性數據表,是由堵轉實驗測得的數據并根據式(1)和式(3)求解。其中轉矩Tk(ik,θk)如圖3所示,由式(3)通過堵轉實驗的方法獲得大量的非線性磁鏈數據φk(ik,θk)對角度的偏導,利用反演方式制作出轉矩-電流-角度位置Tk(ik,θk)數據表。SRM電感Lk(ik,θk)由式(2)磁鏈和電流的比值求得。最后在MATLAB/Simulink環境下搭建了3相12/8極SRM的本體仿真模型。
2 傳統的轉矩分配函數控制
2.1 傳統轉矩分配函數的基本原理
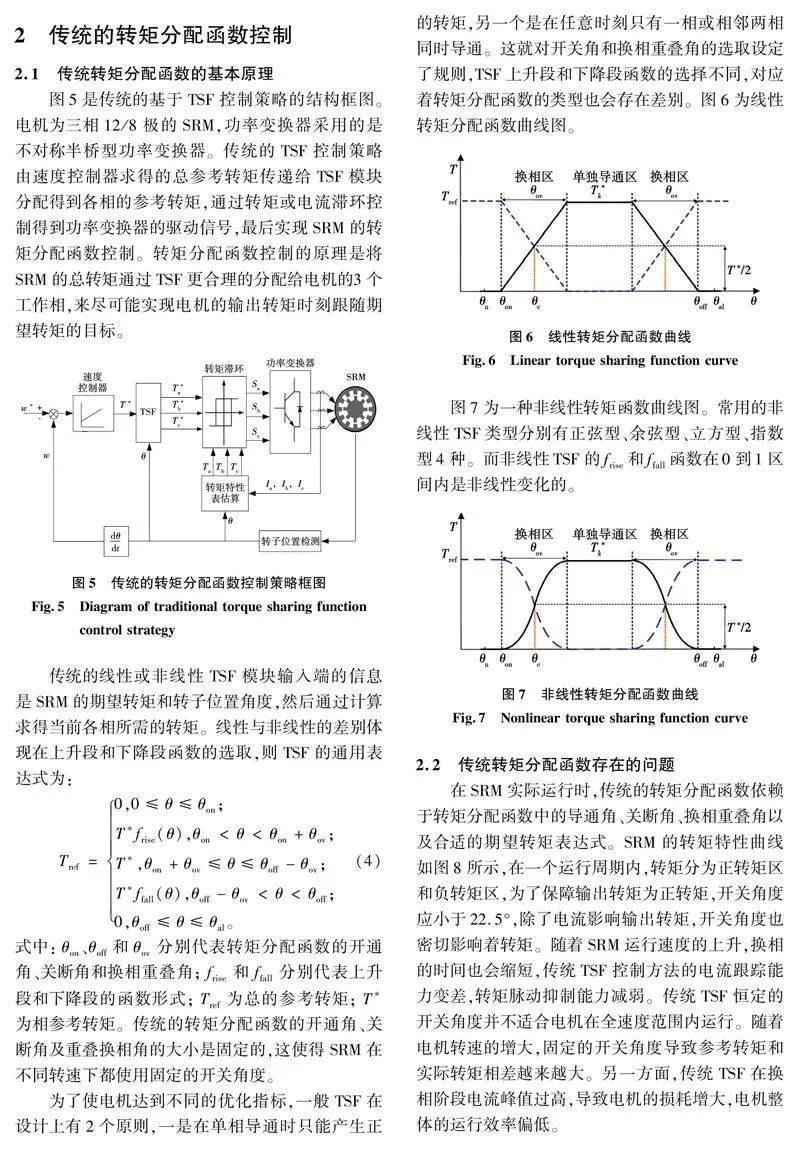
圖5是傳統的基于TSF控制策略的結構框圖。電機為三相12/8極的SRM,功率變換器采用的是不對稱半橋型功率變換器。傳統的TSF控制策略由速度控制器求得的總參考轉矩傳遞給TSF模塊分配得到各相的參考轉矩,通過轉矩或電流滯環控制得到功率變換器的驅動信號,最后實現SRM的轉矩分配函數控制。轉矩分配函數控制的原理是將SRM的總轉矩通過TSF更合理的分配給電機的3個工作相,來盡可能實現電機的輸出轉矩時刻跟隨期望轉矩的目標。
傳統的線性或非線性TSF模塊輸入端的信息是SRM的期望轉矩和轉子位置角度,然后通過計算求得當前各相所需的轉矩。線性與非線性的差別體現在上升段和下降段函數的選取,則TSF的通用表達式為:
式中:θon、θoff和θov分別代表轉矩分配函數的開通角、關斷角和換相重疊角;frise和ffall分別代表上升段和下降段的函數形式;Tref為總的參考轉矩;T*為相參考轉矩。傳統的轉矩分配函數的開通角、關斷角及重疊換相角的大小是固定的,這使得SRM在不同轉速下都使用固定的開關角度。
為了使電機達到不同的優化指標,一般TSF在設計上有2個原則,一是在單相導通時只能產生正的轉矩,另一個是在任意時刻只有一相或相鄰兩相同時導通。這就對開關角和換相重疊角的選取設定了規則,TSF上升段和下降段函數的選擇不同,對應著轉矩分配函數的類型也會存在差別。圖6為線性轉矩分配函數曲線圖。
圖7為一種非線性轉矩函數曲線圖。常用的非線性TSF類型分別有正弦型、余弦型、立方型、指數型4種。而非線性TSF的frise和ffall函數在0到1區間內是非線性變化的。
2.2 傳統轉矩分配函數存在的問題
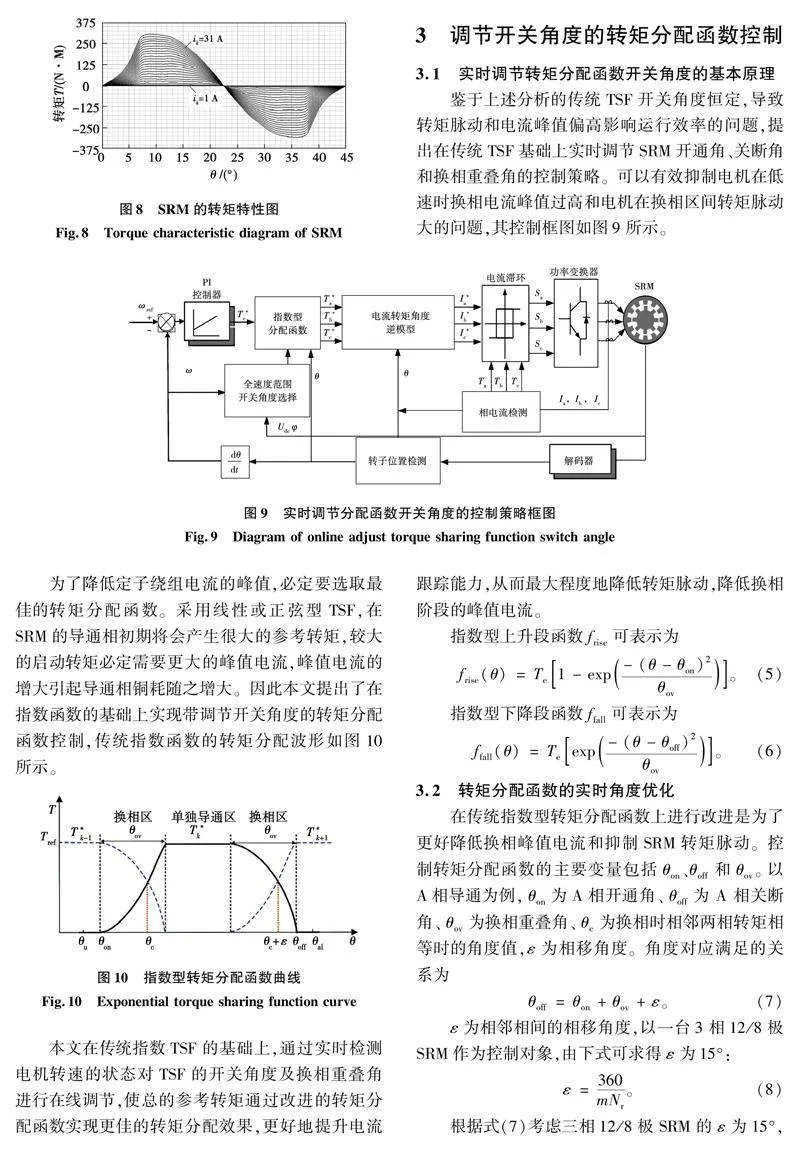
在SRM實際運行時,傳統的轉矩分配函數依賴于轉矩分配函數中的導通角、關斷角、換相重疊角以及合適的期望轉矩表達式。SRM的轉矩特性曲線如圖8所示,在一個運行周期內,轉矩分為正轉矩區和負轉矩區,為了保障輸出轉矩為正轉矩,開關角度應小于22.5°,除了電流影響輸出轉矩,開關角度也密切影響著轉矩。隨著SRM運行速度的上升,換相的時間也會縮短,傳統TSF控制方法的電流跟蹤能力變差,轉矩脈動抑制能力減弱。傳統TSF恒定的開關角度并不適合電機在全速度范圍內運行。隨著電機轉速的增大,固定的開關角度導致參考轉矩和實際轉矩相差越來越大。另一方面,傳統TSF在換相階段電流峰值過高,導致電機的損耗增大,電機整體的運行效率偏低。
3 調節開關角度的轉矩分配函數控制
3.1 實時調節轉矩分配函數開關角度的基本原理
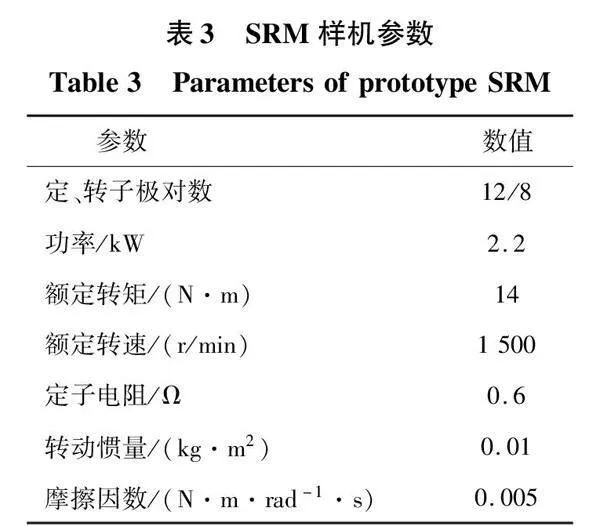
鑒于上述分析的傳統TSF開關角度恒定,導致轉矩脈動和電流峰值偏高影響運行效率的問題,提出在傳統TSF基礎上實時調節SRM開通角、關斷角和換相重疊角的控制策略。可以有效抑制電機在低速時換相電流峰值過高和電機在換相區間轉矩脈動大的問題,其控制框圖如圖9所示。
為了降低定子繞組電流的峰值,必定要選取最佳的轉矩分配函數。采用線性或正弦型TSF,在SRM的導通相初期將會產生很大的參考轉矩,較大的啟動轉矩必定需要更大的峰值電流,峰值電流的增大引起導通相銅耗隨之增大。因此本文提出了在指數函數的基礎上實現帶調節開關角度的轉矩分配函數控制,傳統指數函數的轉矩分配波形如圖10所示。
本文在傳統指數TSF的基礎上,通過實時檢測電機轉速的狀態對TSF的開關角度及換相重疊角進行在線調節,使總的參考轉矩通過改進的轉矩分配函數實現更佳的轉矩分配效果,更好地提升電流跟蹤能力,從而最大程度地降低轉矩脈動,降低換相階段的峰值電流。
SRM控制過程中,開通角θon一般在相繞組定、轉子凸極不對齊位置打開,關斷角θoff一般在定、轉子凸極接近對齊位置關斷。在降低相峰值電流的同時并達到參考轉矩的需求,TSF的設計需在產生極大轉矩前產生激勵電流。SRM在對齊位置時的電流相對較大。當控制激勵電流的開通角超前打開時,電機相峰值電流就會越高;在對齊位置后若上一相還存在電流,將會導致負轉矩的產生。
如表1所示,參考轉矩Tref=5 N·m,電機轉速在200 r/min和800 r/min時選擇不同的開關角度下2個性能指標數值是不同的,選擇最佳開通角度需要通過檢測電機的實際運行工況來設定。設置了不同的最佳開通角的篩選條件,有利于分段解決轉矩分配函數低轉速相電流峰值過高和高轉速轉矩脈動抑制能力減弱等問題。
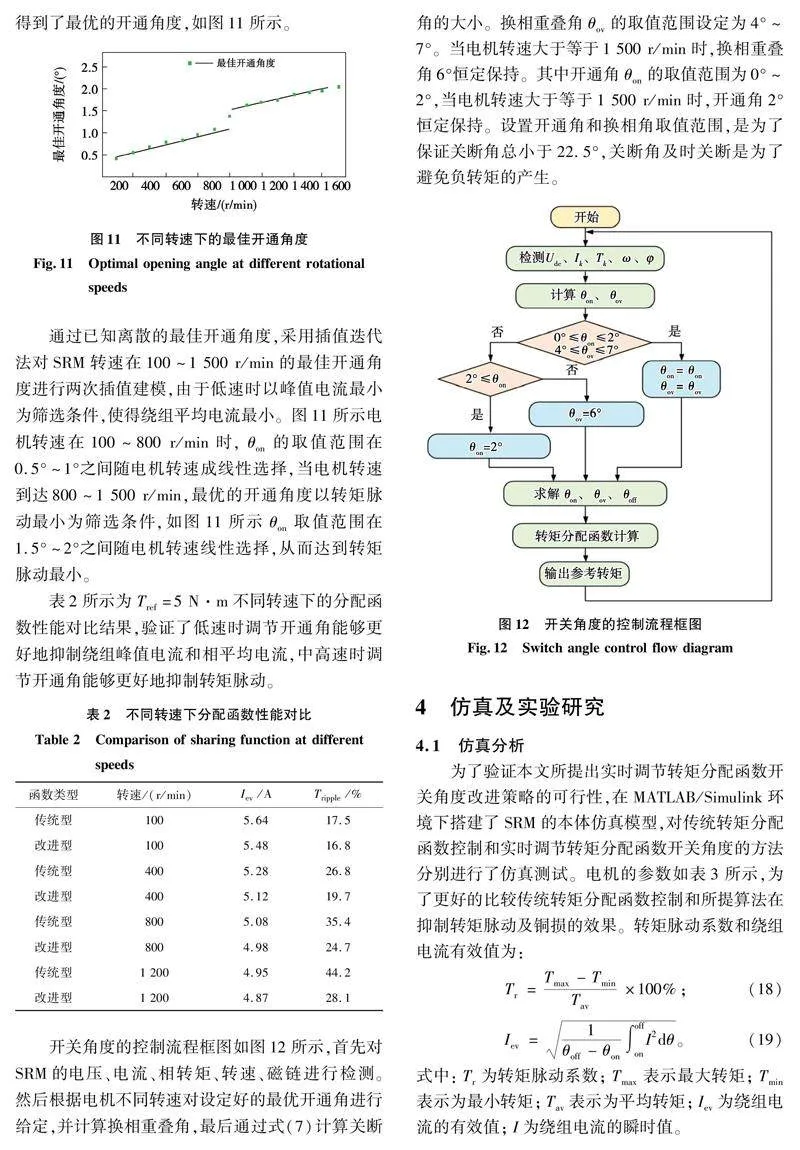
根據SRM不同的轉速,設置了TSF開通角度對應的篩選條件,低速時由于峰值電流較高,以峰值電流最小為篩選條件,中高速時由于隨著電機運行速度的上升,換相時間縮短,轉矩脈動抑制能力減弱,以轉矩脈動最小為篩選條件。如圖11所示,在不同轉速下仿真,得到了最優的開通角度。
通過已知離散的最佳開通角度,采用插值迭代法對SRM轉速在100~1 500 r/min的最佳開通角度進行兩次插值建模,由于低速時以峰值電流最小為篩選條件,使得繞組平均電流最小。圖11所示電機轉速在100~800 r/min時,θon的取值范圍在0.5°~1°之間隨電機轉速成線性選擇,當電機轉速到達800~1 500 r/min,最優的開通角度以轉矩脈動最小為篩選條件,如圖11所示θon取值范圍在1.5°~2°之間隨電機轉速線性選擇,從而達到轉矩脈動最小。
如表2所示,為Tref=5 N·m不同轉速下的分配函數性能對比結果,驗證了低速時調節開通角能夠更好地抑制繞組峰值電流和相平均電流,中高速時調節開通角能夠更好地抑制轉矩脈動。
開關角度的控制流程框圖如圖12所示,首先對SRM的電壓、電流、相轉矩、轉速、磁鏈進行檢測。然后根據電機不同轉速對設定好的最優開通角進行給定,并計算換相重疊角,最后通過式(7)計算關斷角的大小。換相重疊角θov的取值范圍設定為4°~7°。當電機轉速大于等于1 500 r/min時,換相重疊角6°恒定保持。其中開通角θon的取值范圍為0°~2°,當電機轉速大于等于1 500 r/min時,開通角2°恒定保持。設置開通角和換相角取值范圍,是為了保證關斷角總小于22.5°,關斷角及時關斷是為了避免負轉矩的產生。
4 仿真及實驗研究
4.1 仿真分析
為了驗證本文所提出實時調節轉矩分配函數開關角度改進策略的可行性,在MATLAB/Simulink環境下搭建了SRM的本體仿真模型,對傳統轉矩分配函數控制和實時調節轉矩分配函數開關角度的方法分別進行了仿真測試。電機的參數如表3所示,為了更好的比較傳統轉矩分配函數控制和所提算法在抑制轉矩脈動及銅損的效果。轉矩脈動系數和繞組電流有效值為:
式中:Tr為轉矩脈動系數;Tmax表示最大轉矩;Tmin表示為最小轉矩;Tav表示為平均轉矩;Iev為繞組電流的有效值;I為繞組電流的瞬時值。
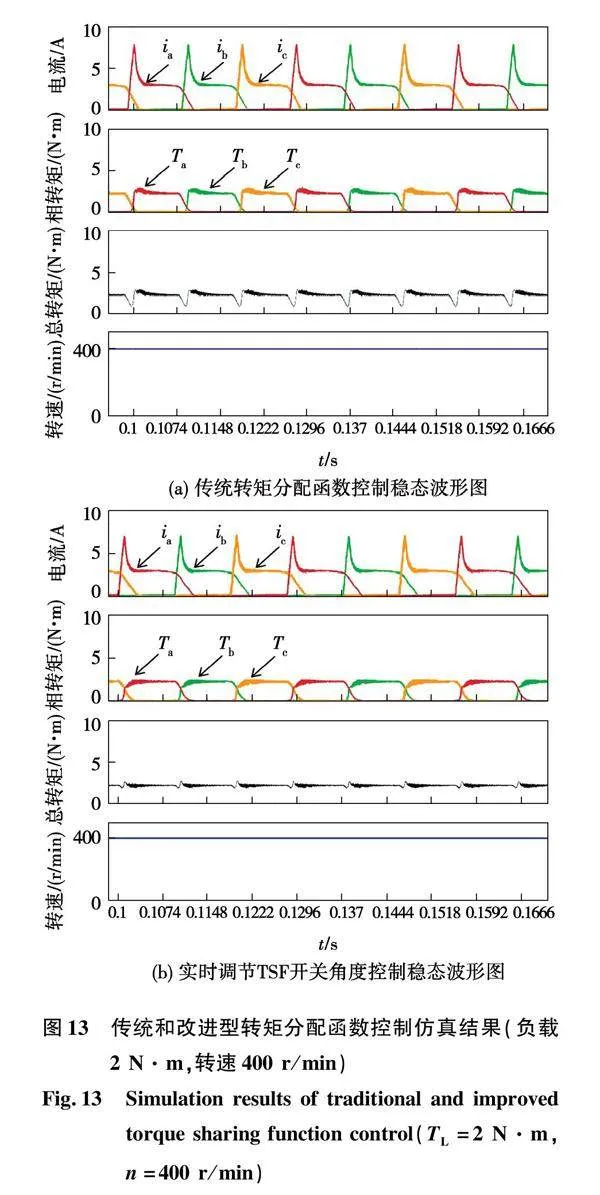
為了對比傳統轉矩分配函數控制和實時調節轉矩分配函數開關角度改進策略在抑制轉矩脈動和降低相峰值電流的控制效果,通過仿真驗證2種算法在不同轉速下的轉矩脈動系數和繞組電流有效值。圖13為電機轉速在低速400 r/min, 參考轉矩為Tref=2 N·m的仿真波形圖。其中圖13(a)為基于傳統開關角度恒定的轉矩分配控制波形圖,其中包括相電流、相轉矩、總轉矩和電機轉速波形。從仿真波形可以看出,傳統的TSF在初始的換相階段由于設定的開通角度較小,導致后一相繞組的相峰值電流快速上升至8.5 A,由于電機轉矩特性,相轉矩仍然不足夠跟蹤上其參考值,造成轉矩脈動。開關角度恒定情況下的轉矩脈動系數為26.4%,繞組電流的有效值4.75 A。圖13(b)為實時調節轉矩分配函數開關角度控制的仿真波形。實時調節開關角度的轉矩分配控制在換相重疊區能有效抑制負轉矩的產生,相繞組的相峰值電流為7.2 A,電機的總轉矩脈動系數降低到19.5%,繞組電流的有效值降低4.32 A。電機在低速時,改進方法在降低電機轉矩脈動的同時也能夠更好地降低相峰值電流,降低電機運行時繞組電流有效值,進而提高電機運行效率。
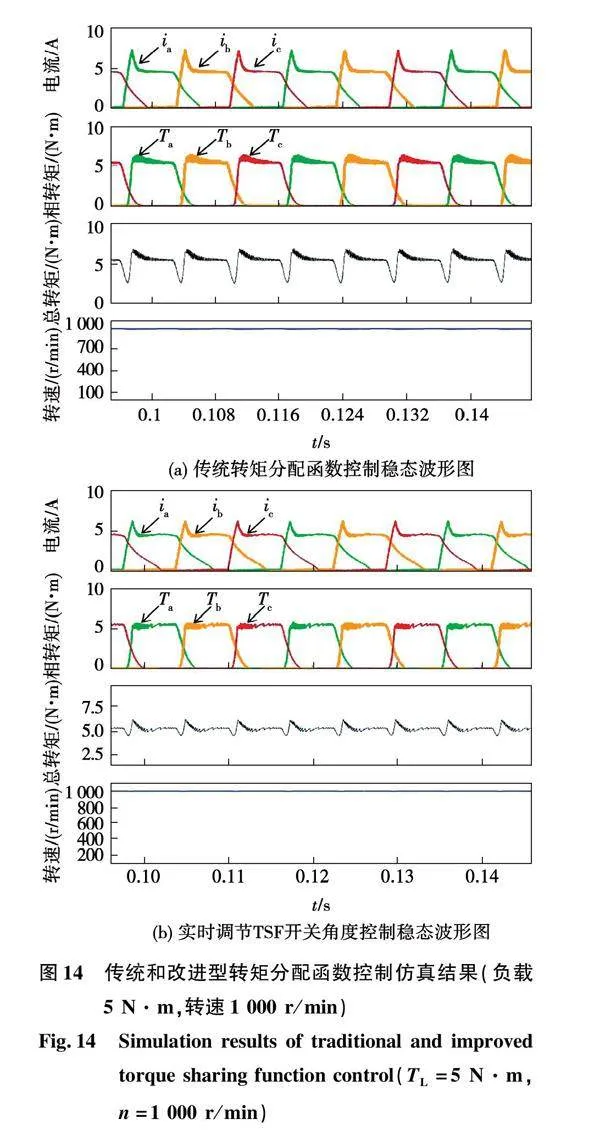
圖14為傳統和改進型轉矩分配函數控制仿真結果,當負載加大到5 N·m,電機轉速加大到中速1 000 r/min時,隨著SRM轉速的升高會導致更大的轉矩脈動。如圖14(a)所示,隨著電機轉速提高,此時傳統的轉矩分配函數控制的轉矩脈動系數經過計算可得為43.5% ,相繞組的單相峰值電流為6.8 A,繞組電流的有效值為5.12 A。圖14(b)為實時調節轉矩分配函數開關角度控制的仿真波形。通過對轉矩分配函數開關角度優化選擇,電機的總轉矩波動降低為25.2%,相繞組的單相峰值電流降為5.8 A,繞組電流的有效值降為5.04 A。電機在中高速運行時,改進的實時調節轉矩分配函數開關角度控制能夠更好地使電機總轉矩波動最小化,有利于電機更平穩地運行。
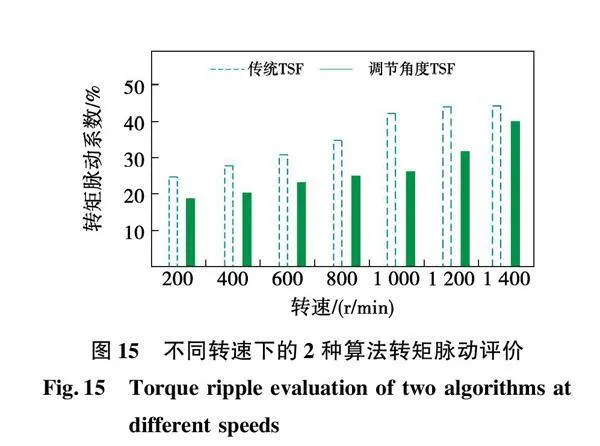
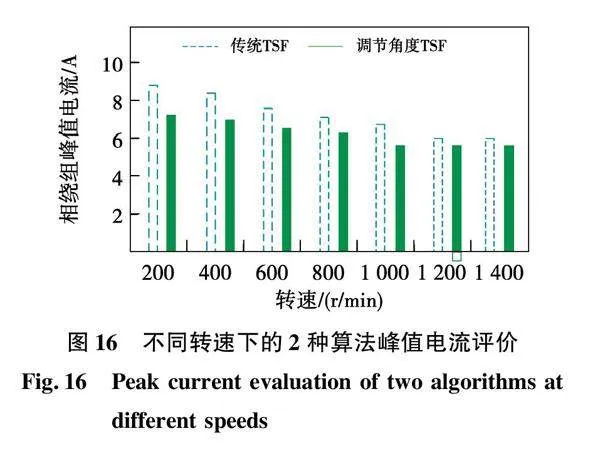
如圖15和圖16所示,為了驗證算法的穩定性,參考轉矩恒定5 N·m,電機轉速在200~1 400 r/min對傳統轉矩分配函數控制和實時調節轉矩分配函數開關角度控制進行轉矩脈動系數和峰值電流評估。結果表明,在中低速情況下,實時優化轉矩分配函數開關角控制能夠較好地抑制轉矩脈動,并降低相繞組峰值電流,從而降低電機銅損,提高電機運行效率。
4.2 實驗結果
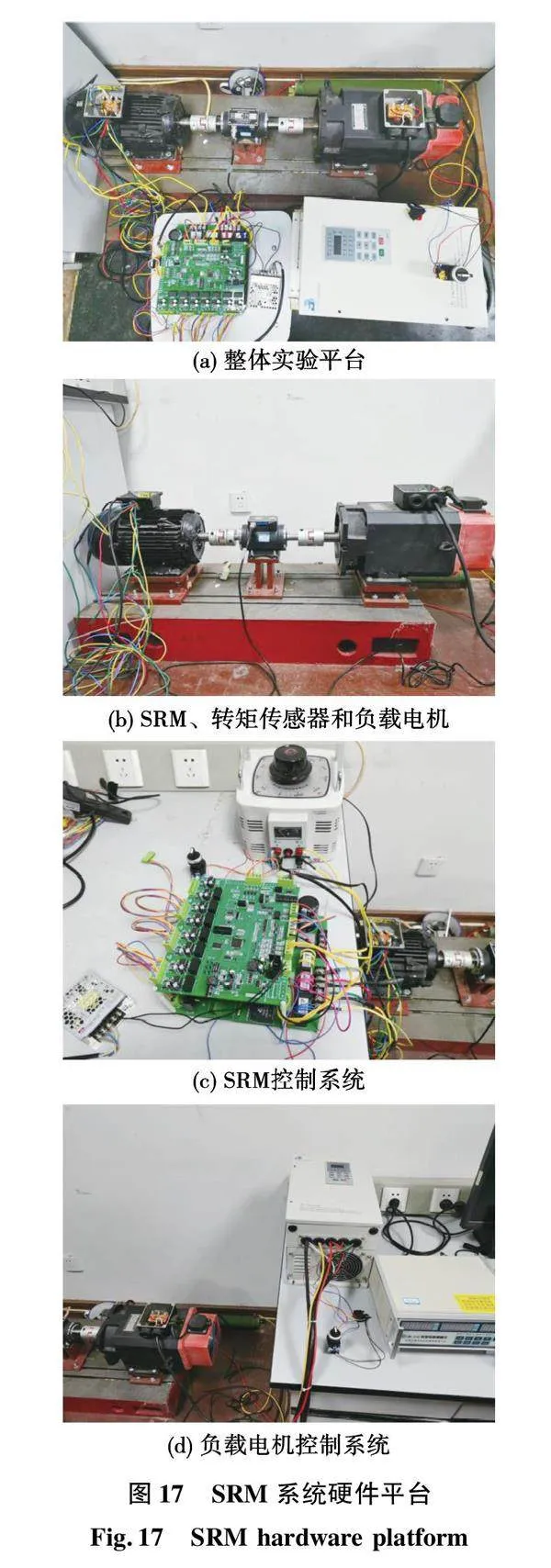
以一臺2.2 kW三相12/8極開關磁阻電機為控制對象搭建實驗平臺進行實驗驗證。圖17為該實驗的實驗平臺,電機參數見表3。
該實驗平臺主要包括開關磁阻電機及其控制器、轉矩傳感器和負載異步電機及其控制器。控制器選用TMS320F2812。異步電機作為電機負載,能輸出恒定力矩。相電流用電流探頭采集,輸出轉矩用JN338型轉矩轉速測量儀進行測量,功率變換器采用三相不對稱半橋的拓撲結構。
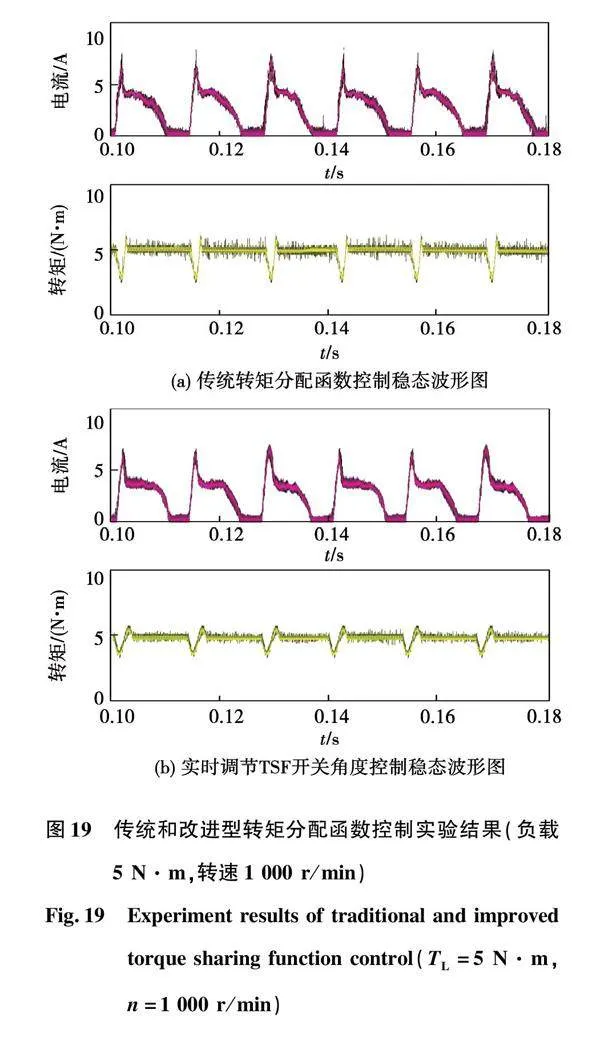
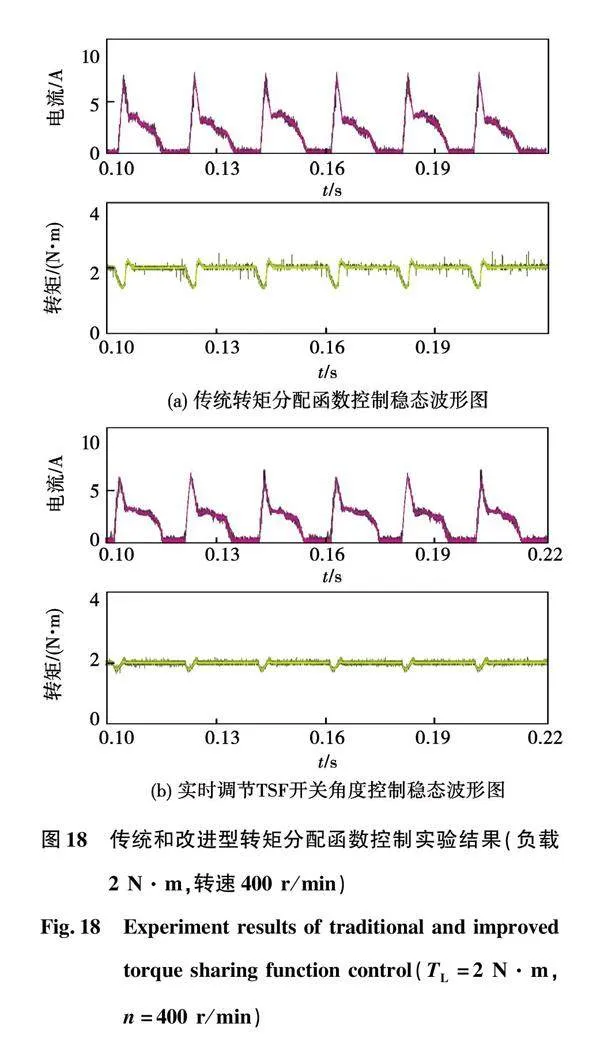
實驗分別在傳統轉矩分配函數控制和實時調節TSF開關角度控制下進行,電機分別運行在400 r/min和1 000 r/min。圖18和圖19為不同參考轉矩和轉速下的相電流和電磁轉矩波形,實驗結果與仿真結果相似,證明了本文所提方法對降低相峰值電流和抑制轉矩脈動方面有一定的優化效果。
5 結 論
本文提出一種實時調節轉矩分配函數開關角的控制策略來降低開關磁阻電機的轉矩脈動和相繞組峰值電流。與傳統轉矩分配控制相比,該方法在電機不同轉速下實時調節轉矩分配函數的開關角度。在保證系統穩定性和響應速度的同時,結果表明本文提出的控制策略在中低速能夠有效地降低轉矩脈動,減小換相期間的電流峰值和相繞組電流有效值,進而減小電機運行的銅耗,提高電機運行效率,證明了所提方法的有效性。同時該方法對電機的參數較為依賴,日后還有很大改進空間。
參 考 文 獻:
[1]VUJICIC P V. Minimization of torque ripple and copper losses in switched reluctance drive [J]. IEEE Transactions on Power Electronics, 2012,27(1):388.
[2]許愛德,樊印海,李自強.空間電壓矢量下SRM轉矩脈動最小化[J]. 電機與控制學報,2010,14(1):35.
XU Aide, FAN Yinhai, LI Ziqiang. SRM torque ripple minimization based on space voltage vector [J]. Electric Machines and Control,2010,14(1):35.
[3]李存賀,王國峰,李巖,等.開關磁阻電機直接自適應神經網絡控制[J].電機與控制學報,2018,22(1):29.
LI Cunhe, WANG Guofeng, LI Yan, et al. Direct adaptive neural network control of switched reluctance motors [J]. Electric Machines and Control, 2018,22(1):29.
[4]何昆侖,許愛德,曹玉昭. 基于12扇區的開關磁阻電機直接轉矩控制脈動抑制研究[J].電機與控制應用,2016,43(10): 19.
HE Kunlun, XU Aide, CAO Yuzhao. Research of switched reluctance motor direct torque control ripple reduction based on twelve sector division [J]. Electric Machines amp; Control Application,2016,43(10): 19.
[5]夏長亮,王明超,史婷娜,等. 基于神經網絡的開關磁阻電機無位置傳感器控制[J].中國電機工程學報,2015,25(13):123.
XIA Changliang, WANG Mingchao, SHI Tingna, et al. Position sensorless control for switched relutance motors using neural network [J]. Proceedings of the CSEE, 2015, 25(13):123.
[6]CAI Y, WANG Y, HU H,et al. Research on rotor position model for switched reluctance motor using neural network [J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(6):2762.
[7]GAN C, WU J, YANG S, et al. Phase current reconstruction of switched reluctance motors from DC-Link current under double high-frequency pulses injection [J]. IEEE Transactions on Industrial Electronics,2015,62(5):3262.
[8]GAN C, WU J, SHEN M, et al. Investigation of skewing effects on the vibration reduction of three-phase switched reluctance motors [J]. IEEE Transactions on Magnetics, 2015,63(4):34.
[9]LI Jialing, DING Wen, YUAN Jiangnan, et al. An improved model predictive control method of switched reluctance motor based on direct torque control[J]. IEEE Transactions on Electrical Machines and Systems, 2021, 24(10):2568.
[10]CATATA E H, LUQUE D B, AZCUE-PUMA J L. Direct instantaneous torque control of three phase 6/4 switched reluctance generator operating at low speeds [J]. IEEE Transactions on Electrical Engineering, 2019,10(1109): 1.
[11]孫慶國,吳建華.基于轉矩分配函數在線修正的開關磁阻電機轉矩脈動抑制策略[J].電機與控制學報,2017,21(12):1.
SUN Qingguo,WU Jianhua. Torque ripple minimization for switched reluctance motors by online modification of torque sharing function[J].Electric Machines and Control,2017,21(12):1.
[12]XUE X D, CHENG K W, HO S L. Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives [J]. IEEE Transactions on Power Electronics, 2019,24(9):2076.
[13]SAHOO S K, DASGUPTA S, PANDA S K, et al. A Lyapunov function-based robust direct torque controller for a switched reluctance motor drive system [J]. IEEE Transactions on Power Electronics, 2012,27(2):555.
[14]YE J, BILGIN B. An extended-speed low-ripple torque control of switched reluctance motor drives [J]. IEEE Transactions on Power Electronics,2015,30(3): 1457.
[15]YE J, HENSLEY F. Torque ripple and copper loss minimization for a family of mutually coupled switched reluctance machines [J]. IEEE Transactions on Electronics,2017,10(11):546.
(編輯:劉琳琳)
收稿日期: 2022-09-30
基金項目:國家自然科學基金(51407021);中央高校基本科研業務費(3132015214)
作者簡介:許愛德(1974—),女,博士,教授,研究方向為電機與控制;
孫景浩(1997—),男,碩士,研究方向為電機與控制;
冷 冰(1998—),男,碩士,研究方向為開關磁阻電機驅動控制;
楊 洋(1997—),男,碩士,研究方向為電機與控制。
通信作者:許愛德
