基于端電壓尖峰的無刷直流電機無位置傳感器換相控制策略
2024-06-30 00:00:00黃文暉閔華松
電機與控制學報 2024年5期
摘 要:針對現有的換相誤差補償方法需要額外濾波電路和檢測電路導致無傳感器換相方法變得更加復雜的問題,提出一種端電壓尖峰脈沖換相誤差補償方法,實現了對無刷直流電機無傳感器換相誤差的準確補償。研究了抗干擾性強的端電壓尖峰脈沖信號的變化特性,得出了端電壓尖峰脈沖持續時間是隨著換相誤差單調變化的結論,并利用端電壓尖峰脈沖設計了換相誤差閉環控制方法。該方法無需額外的濾波電路和檢測電路,簡化了換相誤差補償方法的電路設計,并且具備良好的魯棒性和準確性。搭建了仿真和實際實驗平臺,對比了補償前后的換相誤差,實驗結果表明,所提出方法能夠實現準確的換相誤差補償。仿真實驗和實際實驗中,換相誤差分別被控制在了1.1個電角度范圍內和4個電角度范圍內。在速度調控實驗中,補償后的無傳感器方法表現出了和霍爾傳感器相似的動態特性。相比于現有方法,提出方法更適合無刷直流電機無傳感器方法在高性能電機控制場景的應用。
關鍵詞:無刷直流電機;六步換相法;無傳感器控制;換相誤差補償;端電壓尖峰脈沖;閉環控制
DOI:10.15938/j.emc.2024.05.000
中圖分類號:TM351文獻標志碼:A
Sensorless control strategy for brushless direct current motor based on terminal voltage spikes
HUANG Wenhui, MIN Huasong
(Institute of Robotics and Intelligent Systems, Wuhan University of Science and Technology, Wuhan 430081, China)
Abstract:The existing commutation error compensation methods require additional filtering and detection circuits, leading to increased complexity in brushless DC motors (BLDCM) sensorless commutation methods. In response to this issue, a method for compensating commutation errors using terminal voltage spikes (TVS) is proposed, achieving accurate compensation for sensorless commutation errors in BLDCM. This paper investigates the strong anti-interference characteristics of the TVS signal and concludes that the duration of the TVS changes monotonically with the commutation error. Furthermore, a closed-loop control method for commutation error compensation is designed based on the duration of the TVS. This method eliminates the need for additional filtering and detection circuits, simplifying the circuit design for commutation error compensation while demonstrating good robustness and accuracy. Comparative analysis of phase errors before and after compensation is conducted using simulation and practical experimental platforms, with the results showing that the proposed method can achieve accurate commutation error compensation. In both simulation and practical experiments, the phase errors were controlled within a range of 1.1 electrical degrees and 4 electrical degrees, respectively. In speed control experiments, the sensorless method after compensation exhibited dynamic characteristics similar to those of Hall sensor-based methods. Compared to existing methods, the proposed method is better suited for the application of BLDCM sensorless methods in high-performance motor control scenarios.
Keywords:brushless direct current motor; six-step commutation; sensorless control; commutation correction; terminal voltage spike; hall signal restore; closed-loop control
0 引 言
無刷直流電機(brushless direct current motor,BLDCM)無傳感器驅動控制技術已被廣泛應用。無刷直流電機無傳感器驅動技術避免了編碼器或霍爾傳感器帶來的安裝、檢修等問題,也避免了它們額外造成的能量損耗[1-8]。但是,無傳感器驅動控制中存在的換相誤差降低了無刷直流電機的動態性能,限制了無刷直流電機無傳感器技術在高速場景的推廣使用。
根據文獻[9]對換相誤差的理論分析,換相誤差主要在換相點檢測和實現換相操作兩個環節中產生。換相點檢測環節是通過檢測電機的磁鏈或反電動勢信號來實現的。由于無刷直流電機普遍采用的是PWM調制策略,使得檢測反電動勢或磁鏈信號時,必須使用低通濾波器進行濾波,引入了不可避免的滯后換相誤差[10-13]。而且,在端電壓信號處理過程中,定子電阻的壓降以及中性點電壓的漂移會對反電動勢的波形造成影響,使換相點檢測出現相移,在低速時尤其明顯。換相操作根據采用的換相點檢測方式的不同存在差異,線電壓法[13]以及G函數磁鏈法[14]可以直接檢測換相點,無需移相器,避免了換相操作時引入的額外誤差。但是,端電壓過零點方法以及經典磁鏈法,在檢測到過零點后,需要移相30個電角度才能獲得換相點。其中,移相器易受到換相頻率的影響,產生額外的換相誤差[15]。換相點檢測和實現換相操作兩個環節產生的換相誤差不是固定的,而是會隨著電機的運行狀態發生動態變化[16],這使得準確補償換相誤差比較困難。
文獻[17]將換相誤差補償方法可以分為開環誤差補償方法和閉環誤差補償方法。常用的開環誤差補償方法通過對比無傳感器換相點和編碼器信號之間進行,建立速度和換相誤差之間的對應表,根據電機轉速對換相誤差進行開環補償[18]。該方法誤差補償精度差,且實際應用中無法建立準確的速度-誤差對應表。文獻[6]提出使用遲滯比較器來補償低通濾波器造成的換相誤差,但無法實現對換相誤差的準確補償。文獻[7]深入地分析了換相誤差產生機理,設計了分段模型,并結合遲滯比較器,實現了換相誤差的精確補償,但方法復雜,不易于參數調整和具體實現。相比與開環誤差補償方法,閉環誤差補償方法是更加準確可靠的方式。閉環誤差補償通常采用分析電機電氣信號的特殊性,并建立相關模型的方法來計算換相誤差,補償精度高,收斂性好。
閉環誤差控制方法中前沿的研究主要包括兩種方法:相電流積分法和反電動勢對稱法。相電流積分法利用磁鏈和相電流積分的相位差來實現換相誤差閉環控制,但是需要額外的高通濾波器和低通濾波器。文獻[19]為準確地補償換相誤差,提出采用3個二階高通濾波器的組合形式。但是,高通濾波器的使用使無傳感器驅動控制方法復雜化,增大了調試難度。文獻[20]引入了改進二階積分器,更好地處理相電流積分以及磁鏈的直流分量,降低濾波器參數的調試難度。同樣的,積分器的使用也增大了補償算法對計算資源的占用比例。文獻[21]提出反電動勢對稱法是通過對比同相相鄰反電動勢的電位差實現換相誤差閉環控制,該方法具備良好的誤差檢測精度和穩定性。但是,該方法需要中性點電壓和低通濾波器來獲得反電動勢信號,使得該方法存在漂移,需要使用偏移值補償。文獻[22]建立了三種過零點擾動模型,并設計了基礎延遲時間擇優策略和換相時間補償函數。該方法很好地解決了變負載和變速度下的換相誤差補償問題,但是模型切換會影響收斂性。以上方法雖然都通過分析特殊的電氣信號并采用閉環策略實現了精確的換相誤差補償。但是,額外的濾波電路及偏移值調整也使無傳感器方法復雜化,增大了實現難度,無法方便地部署到實際應用場景中。
為了更加簡便準確地實現換相誤差補償控制,本文對換相過程的續流現象進行了分析,推導了端電壓尖峰脈沖持續時間(續流時間)和換相誤差之間的函數關系,提出了一種基于端電壓尖峰脈沖的無刷直流電機換相誤差補償方法。此外,針對單一電周期內每個換相點換相誤差可能不一致,頻繁補償會產生振蕩的問題,文獻[18]提出通過計算換相點來代替檢測換相點的思路。本文在此基礎上設計了霍爾信號還原方法,提升換相誤差補償的準確性和穩定性。本文提出方法不僅可以準確補償換相誤差,而且無需額外的換相誤差檢測電路以及額外的濾波電路。
1 尖峰脈沖時間-換相誤差模型
1.1 無刷直流電機六步換相及尖峰脈沖產生過程
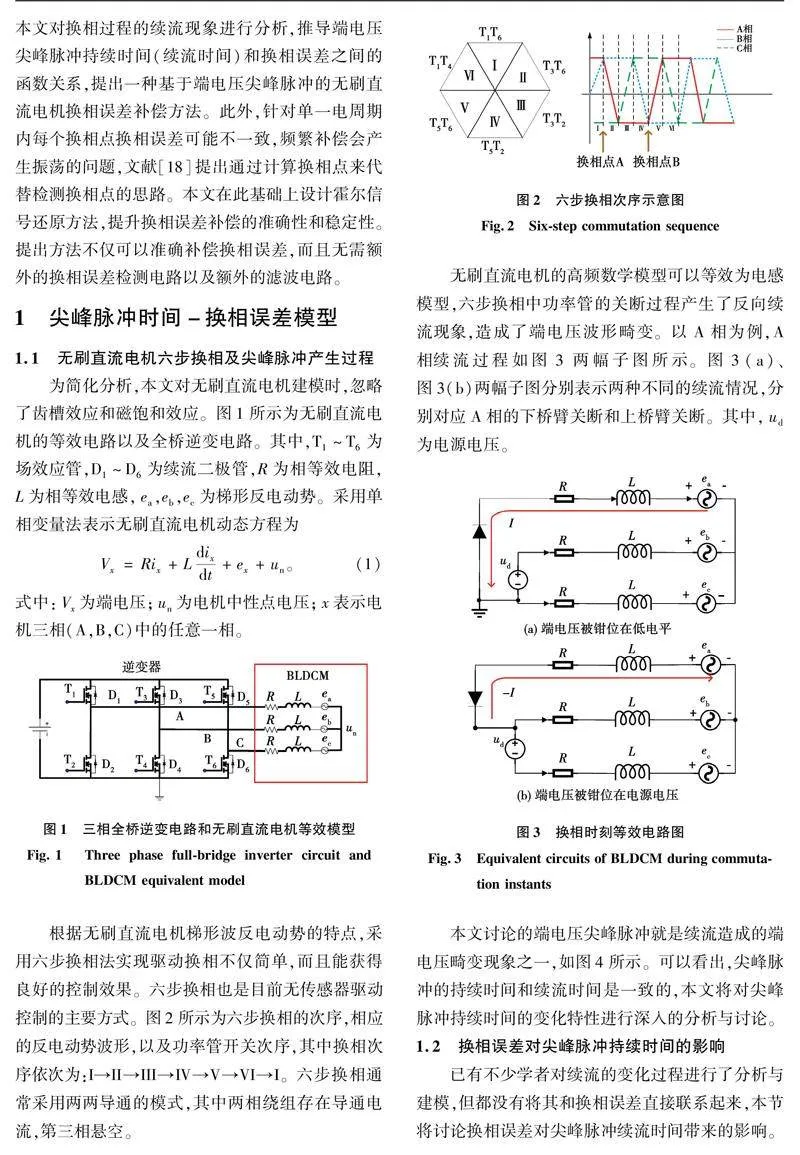
為簡化分析,本文對無刷直流電機建模時,忽略了齒槽效應和磁飽和效應。圖1所示為無刷直流電機的等效電路以及全橋逆變電路。其中,T1~T6為場效應管,D1~D6為續流二極管,R為相等效電阻,L為相等效電感,ea,eb,ec為梯形反電動勢。采用單相變量法表示無刷直流電機動態方程為
式中:Vx為端電壓;un為電機中性點電壓;x表示電機三相(A,B,C)中的任意一相。
根據無刷直流電機梯形波反電動勢的特點,采用六步換相法實現驅動換相,不僅簡單,而且能獲得良好的控制效果。六步換相也是目前無傳感器驅動控制的主要方式。圖2所示為六步換相的次序,相應的反電動勢波形,以及功率管開關次序,其中換相次序依次為:I-gt;II-gt;III-gt;IV-gt;V-gt;VI-gt;I。六步換相通常采用兩兩導通的模式,其中兩相繞組存在導通電流,第三相懸空。
無刷直流電機的高頻數學模型可以等效為電感模型,六步換相中功率管的關斷過程產生了反向續流現象,造成了端電壓波形畸變。以A相為例,A相續流過程如圖3兩幅子圖所示。圖3(a)、圖3(b)兩幅子圖分別表示兩種不同的續流情況,分別對應A相的下橋臂關斷和上橋臂關斷。其中,ud為電源電壓。
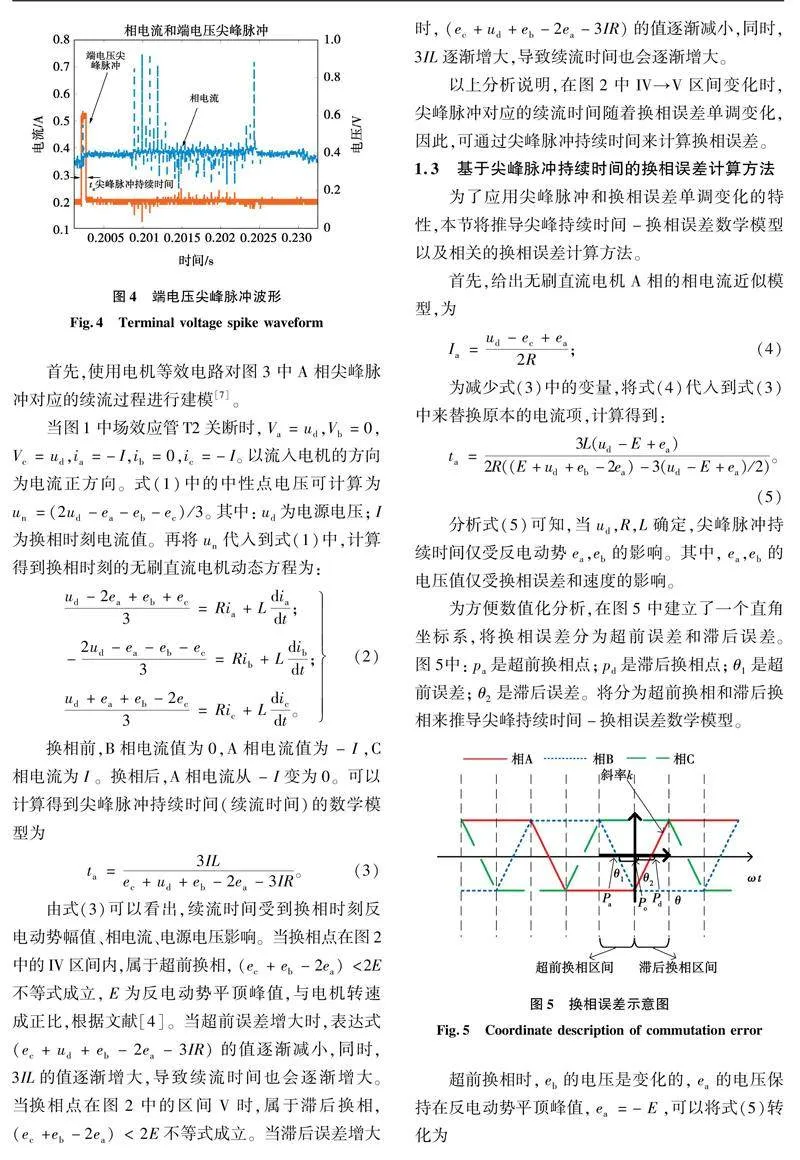
本文討論的端電壓尖峰脈沖就是續流造成的端電壓畸變現象之一,如圖4所示。可以看出,尖峰脈沖的持續時間和續流時間是一致的,本文將對尖峰脈沖持續時間的變化特性進行深入的分析與討論。
1.2 換相誤差對尖峰脈沖持續時間的影響
已有不少學者對續流的變化過程進行了分析與建模,但都沒有將其和換相誤差直接聯系起來,本節將討論換相誤差對尖峰脈沖續流時間帶來的影響。
分析式(5)可知,當ud,R,L確定,尖峰脈沖持續時間僅受反電動勢ea,eb的影響。其中,ea,eb的電壓值僅受換相誤差和速度的影響。
為方便數值化分析,在圖5中建立了一個直角坐標系,將換相誤差分為超前誤差和滯后誤差。圖5中:pa是超前換相點;pd是滯后換相點;θ1是超前誤差;θ2是滯后誤差。將分為超前換相和滯后換相來推導尖峰持續時間-換相誤差數學模型。
超前換相時,eb的電壓是變化的,ea的電壓保持在反電動勢平頂峰值,ea=-E,可以將式(5)轉化為
2 閉環誤差補償策略
由于換相誤差檢測滯后性的影響,直接將模型計算的換相誤差轉換為補償時間無法準確地實現換相誤差補償。本文采用閉環誤差補償策略,將模型計算誤差作為反饋量,結合PID控制率,保證了系統的收斂性和補償準確性。同時,考慮到誤差補償帶來的振蕩問題,設計了霍爾信號還原方法。
2.1 霍爾信號還原方法
傳統的誤差補償方法是對每一個換相點的換相誤差進行補償,當存在換相點換相誤差不一致的情況時,補償過程會造成額外的振蕩并降低誤差補償收斂速度。本文設計了霍爾信號還原方法,減少了換相點檢測次數以及補償次數,保證換相誤差補償的穩定性和準確性。
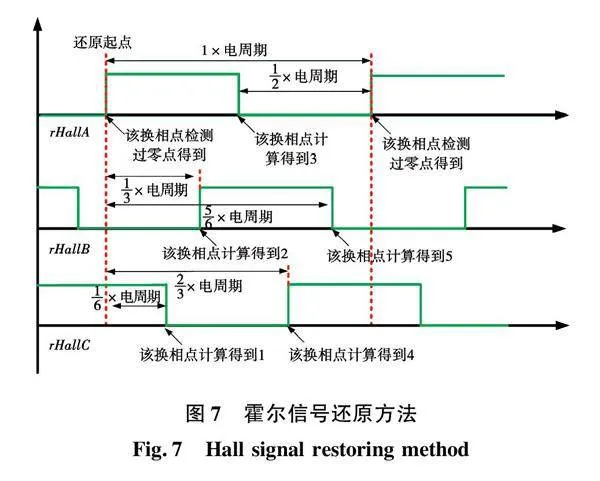
霍爾信號還原方法使用計算換相點來代替檢測,每個電周期僅需檢測單獨一相的換相點。單個電周期內的電機轉速可以被認為是恒定的,因此,其余換相點在已知電周期起止點的前提下通過計算插補得到是可行的[23]。計算過程如圖7所示,rHallA表示還原的A相霍爾信號,rHallB表示還原的B相霍爾信號,rHallC表示還原的C相霍爾信號。本文使用A相的過零點為基準點來實現換相點計算,每個電周期需要計算插補5個換相點,每個換相點的延時由電周期的持續時間決定。
2.2 數據采集及誤差補償計算方法
電流采樣參考ST公司提出的FOC控制中的采樣方法,使用PWM頻率的上升沿對電流進行初采樣[23]。再利用還原霍爾信號的上升沿對采樣電流進行二次采樣,獲得換相時刻電流。
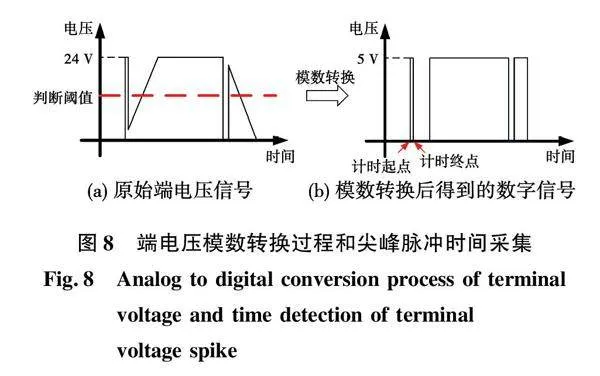
端電壓尖峰脈沖的時間采集無需濾波器。首先通過分壓電路獲得分壓后的模擬信號,再通過數模轉換獲得數字信號,最后檢測持續時間。端電壓尖峰脈沖的持續時間采集也由還原霍爾信號的上升沿觸發。每相端電壓尖峰脈沖的上升沿和還原霍爾信號的上升沿時序一致,可以將還原霍爾信號的上升沿作為尖峰脈沖持續時間的計時起點,將尖峰脈沖的下降沿作為計時終點。如圖8所示,通過分壓電路及模數轉換后,以還原霍爾信號的上升沿作為觸發信號,完成對應相的尖峰持續時間的采集。結合還原霍爾信號方法的使用,本文僅對A相的端電壓尖峰脈沖進行測量。
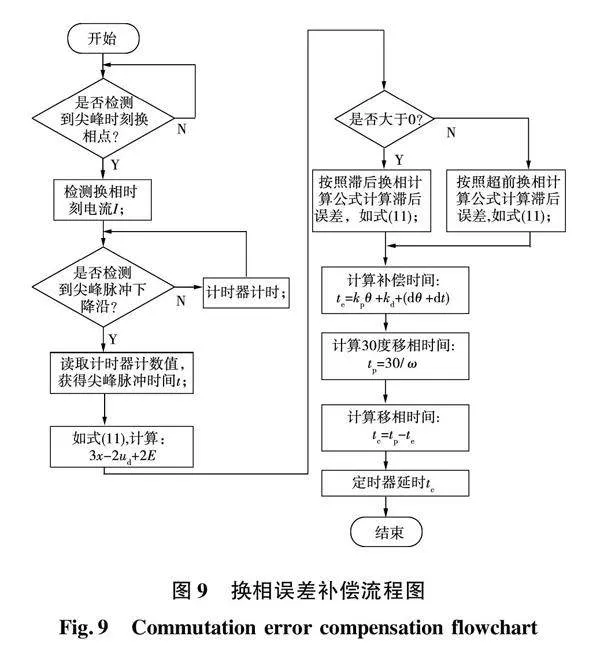
換相誤差補償無法直接補償誤差角度,是通過修正端電壓過零點法的延時時間實現,因此,誤差補償存在滯后性。無刷直流電機換相點滯后于反電動勢過零點30個電角度。因此,檢測到過零點后,需要計算延遲時間,延遲時間=((30×3.14)/(180×電機轉速(弧度/秒)))。通過將換相誤差折算成補償時間,修正延遲時間即可完成對換相誤差的補償。
為保證誤差補償的收斂性和準確性,參考電機位置環控制策略,設計了如圖9所示的誤差補償時間計算策略。
2.3 無傳感器換相補償策略整體設計
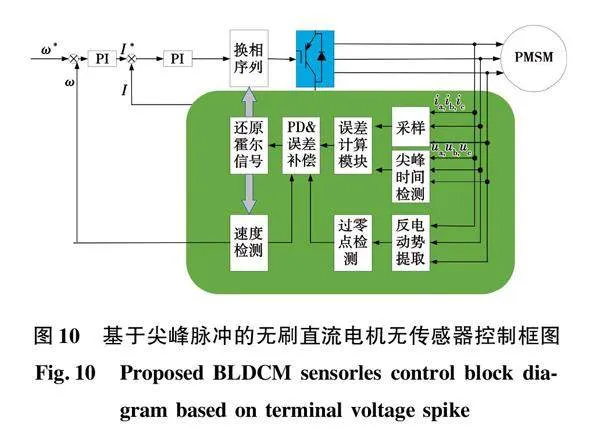
圖10所示為本文提出的無傳感器換相控制框圖,采用的是誤差反饋控制的模式。首先,檢測尖峰脈沖持續時間和換相時刻電流,將其發送到誤差計算模塊,基于尖峰脈沖持續時間-誤差模型計算得到換相誤差。然后,采用PD計算補償時間,在檢測到過零點后,補償相移時間,得到換相點。最后,通過霍爾信號還原方法,還原出霍爾信號,用于換相控制和速度控制。
3 仿真與實驗
3.1 實驗平臺
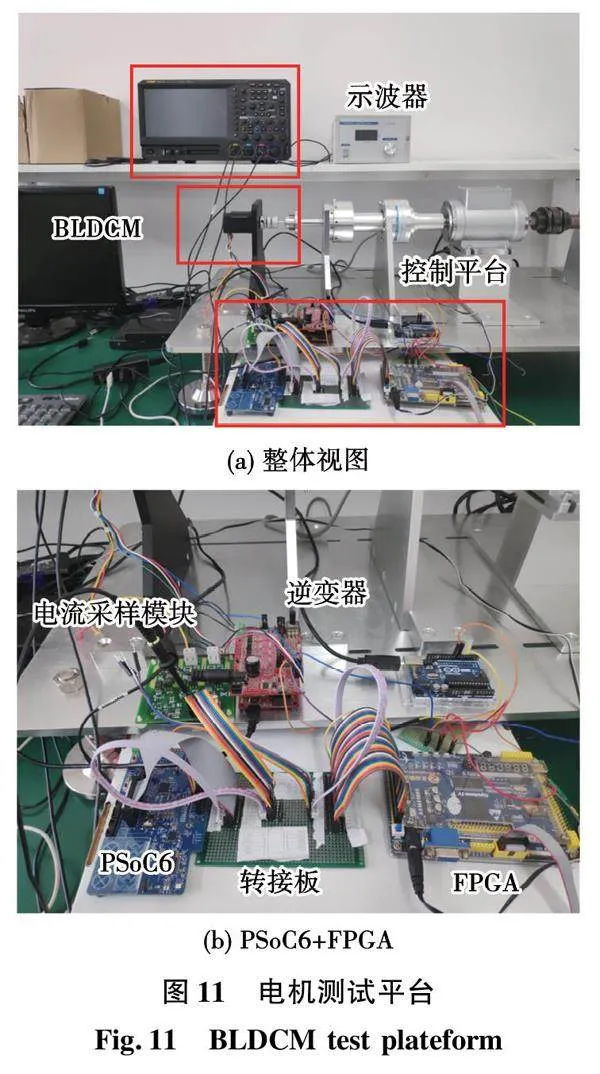
為驗證提出方法的有效性,通過如圖11所示的電機測試平臺進行實驗驗證。平臺由控制器、電流采集電路、驅動電路以及無刷直流電機組成。測試電機為24 V、80 W小型無刷直流電機,電機具體參數如表1。主控芯片采用PSoC6,三相全橋采用MOSFET,開關頻率為20 kHz。尖峰脈沖持續時間檢測和誤差計算在FPGA上完成,12位ADC進行模數轉換。為了更好地驗證本文提出方法,在FPGA上使用50 MHz頻率,對尖峰脈沖持續時間進行計時,時間分辨率為0.02 μs,可以實現對尖峰脈沖持續時間的準確采集,且FPGA可以實現高速處理和計算。
3.2 尖峰脈沖持續時間-誤差模型仿真實驗
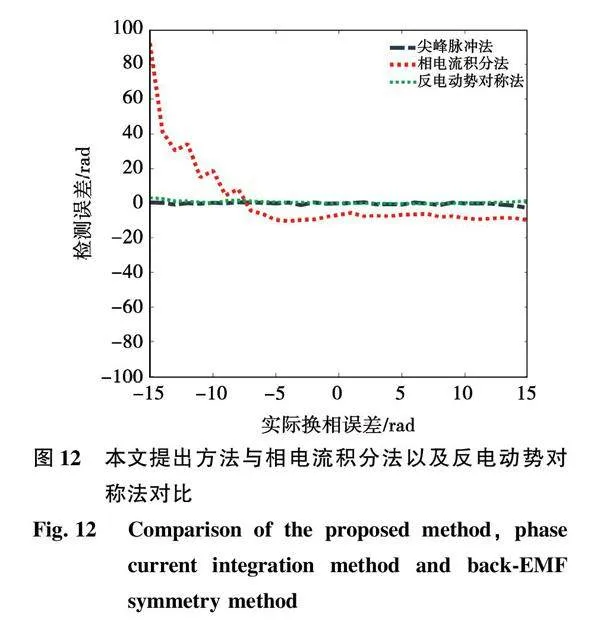
本文在Matlab/SIMULINK環境中搭建了本文的驗證模型,驗證了利用尖峰脈沖補償誤差的可行性和準確性,同時,也說明了額外濾波電路對誤差檢測造成的負面影響。仿真實驗中,對本文方法與State of the Art的相電流積分法以及反電動勢對稱法進行對比。
在仿真環境下,設定了30組不同的給定換相誤差,換相誤差從電角度-15°變化到電角度15°,間隔為1°,驅動條件為給定負載條件下給定轉速3 000 r/min,對提出方法、相電流積分法以及反電動勢對稱法的誤差檢測效果進行了對比。圖12中,x軸為實際的換相誤差,y軸表示方法估算誤差和實際誤差的差值,褐色點橫線表示是相電流積分法的檢測誤差,綠色實線表示的反電動勢對稱法的檢測誤差,藍色虛線表示的是本文提出方法的檢測誤差,誤差均為電角度。
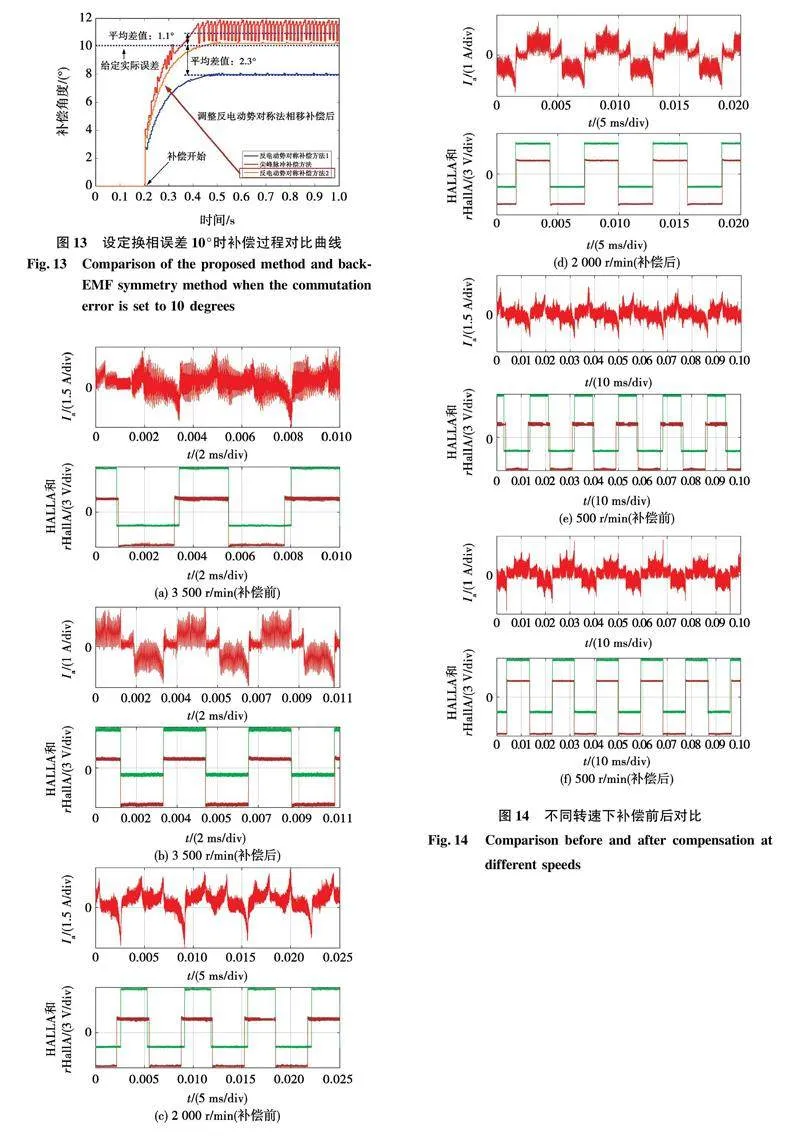
圖12中,相電流積分法的檢測誤差是高通濾波器濾除直流分量過程中引入的,而且,相電流積分法對于超前換相誤差檢測能力有限。此外,反電動勢對稱法比較依賴于偏移值的矯正。圖13中在給定滯后誤差下對本文方法和反電動勢對稱法進行了對比測試,反電動勢對稱方法1為不進行偏移補償時的效果,反電動勢對稱方法2為修改偏移補償后的效果,修改偏移值后,反電動勢對稱法的補償精度得到明顯提升。
可以看出,尖峰脈沖檢測換相誤差不僅無需額外的低通濾波器、高通濾波器以及偏移值,而且具備穩定可靠誤差檢測精度。由于尖峰脈沖時間檢測分辨率的影響,尖峰脈沖檢測換相誤差會存在一定的振蕩,但不影響整體的補償精度,提出方法的平均誤差可以控制在1.1°電角度,振動幅值在±0.8°電角度范圍內。可以滿足對換相誤差準確補償的要求。
3.3 實際平臺實驗驗證
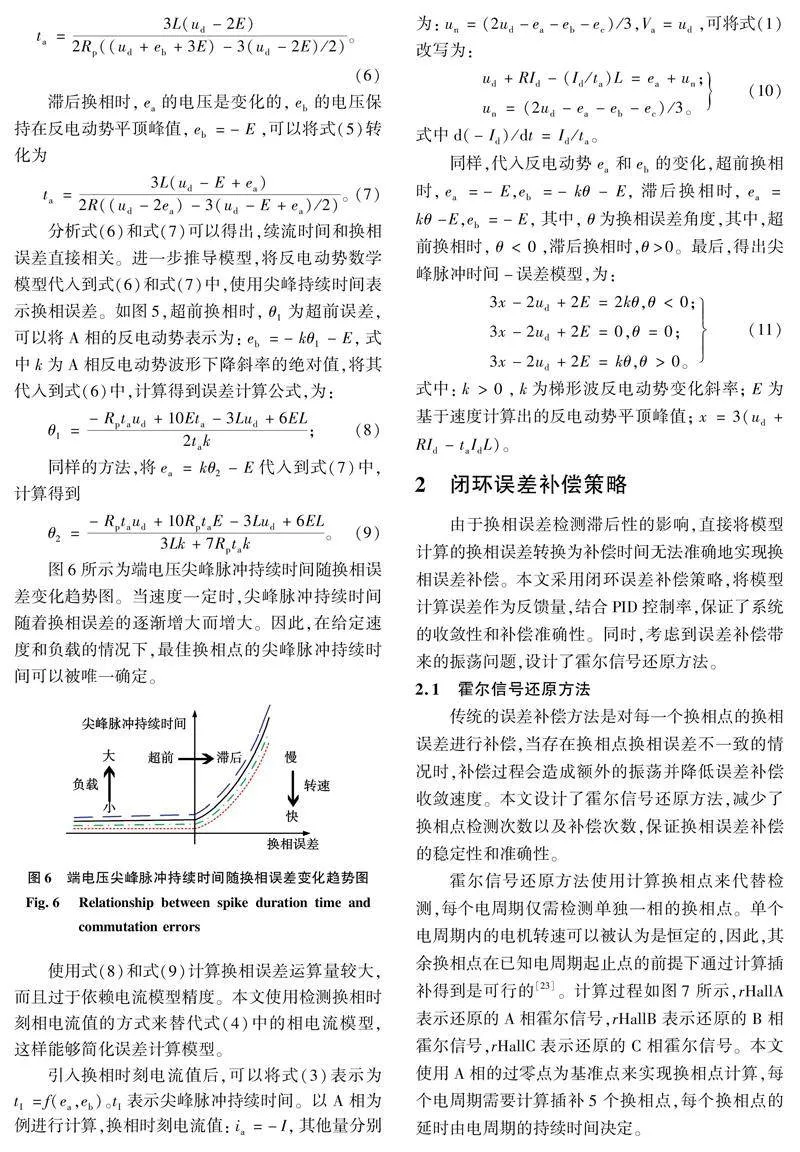
為了驗證提出方法的實際補償效果,在電機測試平臺上進行了補償實驗。圖14所示為實際平臺上設計不同轉速下誤差補償前后霍爾傳感器信號和還原霍爾信號對比圖。
圖14中,紅色曲線為相電流曲線,綠色曲線為還原霍爾信號曲線,褐色曲線為霍爾傳感器信號曲線。實驗結果表明,本文提出的方法可以準確地補償換相誤差。補償前,存在明顯的滯后誤差,最大誤差為14.8°電角度。補償后,換相誤差被控制在4°電角度范圍內。在多個速度測試下均可保證穩定準確的誤差補償精度。
實驗結果表明,本文提出方法在不同速度下均能很好的補償換相誤差,且不受換相誤差不一致問題的影響,有效改善了相電流波形畸變。
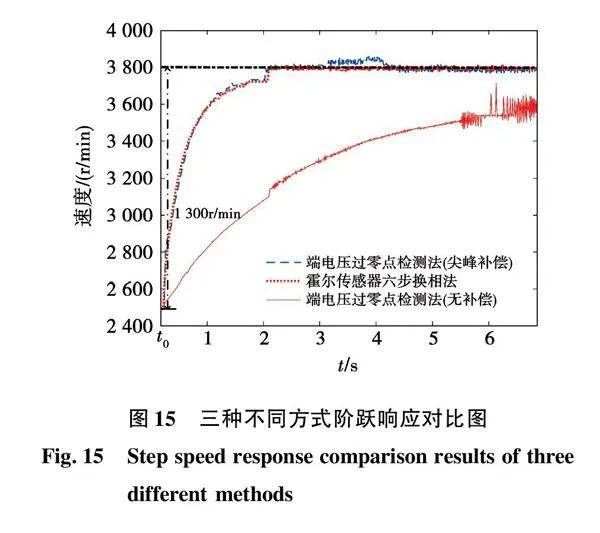
最后,為了驗證提出方法在動態實驗中的補償效果,本文在實際平臺上也設計了速度階躍響應對比實驗,實驗結果如圖15所示。速度控制采用PI控制策略。棕色點虛線表示霍爾傳感器方法的速度階躍響應曲線,藍色橫虛線表示端電壓過零點檢測法(尖峰脈沖誤差補償)的速度階躍響應曲線,紅色實線表示端電壓過零點檢測法(無補償)速度階躍響應曲線。換相方法均采用六步換相法。
補償前,換相誤差的不一致問題使得PWM導通時間明顯變短,如圖14所示。因此,補償前速度階躍響應過程中存在明顯的能量損耗,響應速度緩慢,存在明顯的速度控制誤差和振蕩。補償換相誤差后,速度階躍響應速度得到了明顯改善,速度穩態控制精度也得到了提升,證明了本文提出方法能夠在速度控制應用中實現動態換相誤差補償,提升能量轉換效率。
4 結 論
針對無傳感器驅動控制存在的換相誤差問題,本文提出了基于端電壓尖峰脈沖的換相誤差補償方法。分析得到了尖峰脈沖持續時間隨換相誤差單調變化的特性,推導了數學模型,并設計了結合PI控制率的閉環誤差補償策略。
首先,對所提方法進行了仿真和實際實驗驗證,仿真實驗結果表明,相比于相電流積分法,提出方法無需額外的高通濾波器和低通濾波器,相比于反電動勢對稱法,無需進行偏移值修正。其次,從不同速度下補償前后換相信號對比實驗可以看出,計算換相點來還原霍爾信號的方法不受誤差不一致問題的影響,能夠準確地實現換相誤差補償。最后,速度階躍響應曲線也證明了本文提出方法能夠實現動態誤差補償,降低了換相誤差在電機速度控制應用中產生的額外能量損耗。
本文提出方法無需額外濾波電路和偏移值調整,準確的實現了換相誤差補償,相比于換相前,換相誤差減小了72%,避免了復雜化無刷直流電機無傳感器驅動控制,更便于在一些復雜和高性能的驅動控制場景中應用。
參 考 文 獻:
[1]方紅偉,陳奇,王瑜.直流電機單相電感檢測法無位置傳感器控制[J].中國電機工程學報,2022,42(02):783.
FANG Hongwei, CHEN Qi, WANG Yu. Sensorless control of brushless DC motor with single-phase inductance detection[J]. Proceedings of the CSEE,2022,42(7):783.
[2]GAMAZO-REAL J C, VZQUEZ-SNCHEZ E, GMEZ-GIL J. Control of brushless DC motors using sensorless techniques and application trends[J]. Sensors (Basel),2010,10(7): 6901.
[3]倪有源,余長城,陳浩,等.端電壓平均值和準滑模觀測器的無刷直流電機控制[J].電機與控制學報, 2019,23(5):34.
NI Youyuan,YU Changcheng,CHEN Hao,et al. Control of BLDC motor based on average terminal voltage and quasi sliding mode [J]. Electric Machines and Control,2019,23(5):34.
[4]KIM T H, EHSANI M. Sensorless control of the BLDC motors from near-zero to high speeds[J]. IEEE Transactions on Power Electronics, 2004, 19(6): 1635.
[5]YEE H G, HONG C S, YOO J Y, et al. Sensorless drive for interior permanent magnet brushless DC motors[C]//Proceeding of the IEEE International Electric Machines and Drives Conference Record, May, 18-21, 1997, Milwaukee, WI, USA. 1997: TD1/3.1.
[6]CHUN T W, TRAN Q V, LEE HH, et al. Sensorless control of BLDC motor drive for an automotive fuel pump using a hysteresis comparator[J]. IEEE Transactions on Power Electronics, 2013, 29(2):1382.
[7]李東昇,袁杰,王坤東.SOGI級聯SFNF的高頻注入無傳感器電機控制方法[J].電機與控制學報,2024,28(3):24.
LI Dongsheng,YUAN Jie,WANG Kundong. High frequency injection sensor-less motor control method with cascade of SOGI and SFNF[J]. Electric Machines and Control,2024,28(3):24.
[8]張榮蕓,方星暉,時培成,等.基于改進PSO優化的IPMSM全速域無傳感器控制[J].電機與控制學報, 2022, 26(9):130.
ZHANG Rongyun,FANG Xinghui,SHI Peicheng, et al. Full speed range sensorless control of IPMSM based on improved PSO optimization[J].Electric Machines and Control,2022,26(9):130.
[9]LI W, FANG J, LI H, et al. Position sensorless control without phase shifter for high-speed BLDC motors with low inductance and noideal back EMF[J]. IEEE Transactions on Power Electronics, 2016,31(2):1354.
[10]SHAO J, NOLAN D, TEISSIER M, et al. A novel microcontroller-based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1734.
[11]ZHOU X, CHEN X, ZENG F, et al. Fast commutation instant shift correction method for sensorless coreless BLDC motor based on terminal voltage information[J]. IEEE Transactions on Power Electronics, 2017, 32(12): 9460.
[12]姚緒梁,林浩,魯光旭,等.一種基于線電壓差積分的無位置傳感器無刷直流電機換相誤差檢測和校正方法[J].電工技術學報, 2019, 34(22):4651.
YAO Xuliang,LIN Hao,LU Guangxu, et al. Line voltage difference integral method of commutation error adjustment for sensorless brushless DC motor [J]. Transactions of China Electrotechnical Society,2019,34(22):4651.
[13]CHEN C H, CHENG M Y. A new cost effective sensorless commutation method for brushless DC motors without phase shift circuit and neutral voltage[J]. IEEE Transactions on Power Electronics, 2007, 22(2): 644.
[14]CHEN S,LIU G,ZHU L.Sensorless control strategy of a 315 kW high-speed BLDC motor based on a speed-independent flux linkage function[J]. IEEE Transactions on Industrial Electronics, 2017,64(11):8607.
[15]JUNG D H, HA I J. Low-cost sensorless control of brushless DC motors using a frequency-independent phase shifter[J]. IEEE Transactions on Power Electronics,2000,15(4):744.
[16]LEE D M, LEE W C. Analysis of relationship between abnormal current and position detection error in sensorless controller for interior permanent-magnet brushless DC motors[J]. IEEE Transactions on Magnetics,2008,44(8):2074.
[17]LI T, ZHOU J. High-stability position-sensorless control method for brushless DC motors at low speed[J]. IEEE Transactions on Power Electronics, 2018,34(5):4895.
[18]SU G J, MCKEEVER J W. Low-cost sensorless control of brushless DC motors with improved speed range[J]. IEEE Transactions on Power Electronics,2004,19(2):296.
[19]GU C, WANG X, SHI X, et al. A PLL-based novel commutation correction strategy for a high-speed brushless DC motor sensorless drive system[J]. IEEE Transactions on Power Electronics,2017,65(5):3752.
[20]ZHANG H, LIU G, ZHOU X,et al. High-precision sensorless optimal commutation deviation correction strategy of BLDC motor with asymmetric back EMF[J]. IEEE Transactions on Industrial Informatics, 2020, 17(8): 5250.
[21]JIN H, LIU G, LI H, et al. A fast commutation error correction method for sensorless BLDC motor considering rapidly varying rotor speed[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 3938.
[22]余岳,李誠,劉建華,等.基于脈幅調制的超高速無刷直流電機過零點檢測補償策略研究[J/OL].電工技學報:1-14[2024-04-21].https://doi.org/10.19595/j.cnki.1000-6753.tces.230985.
YU Yue, LI Cheng, LIU Jianhua, et al. Research on zero-crossing detection and compensation strategy of ultra-high-speed brushless DC motor based on pulse amplitude modulation[J/OL]. Transactions of China Electrotechnical Society, 2024, 1-14[2024-04-21]. https://doi.org/10.19595/j.cnki.1000-6753.tces.230985.
[23]SGS-THOMSON Microelectronics.STM32 Motor Control SDK USER Manual [M/OL]. 2018[2018-10]. https://www.st.com/resource/en/user_manual/um2392-stm32-motor-control-sdk-stmicroelectronics.pdf.
(編輯:劉素菊)
收稿日期: 2022-08-29
基金項目:國家自然科學基金(62073249)
作者簡介:黃文暉(1994—),男,博士研究生,研究方向為機械臂單關節控制及動力學控制;
閔華松(1969—),男,博士,教授,研究方向為嵌入式與智能機器人。
通信作者:閔華松
