面向月球科研站任務的地月準實時遙操作模擬驗證系統設計與關鍵技術研究
2024-03-08 02:52:24胡國林羅益鴻梁家林萬文輝
上海航天 2024年1期
王 鎵,胡國林,羅益鴻,梁家林,萬文輝,趙 迪,薄 正,4
(1.北京航天飛行控制中心,北京 100094;2.中國科學院 空天信息創新研究院/遙感科學國家重點實驗室,北京 100101;3.華中科技大學 機械工程學院,湖北 武漢 430074;4.中國科學院 空間應用工程與技術中心,北京 100094)
0 引言
作為地球唯一的天然衛星,自古以來月球就是人類文明發展的重要參與者與見證者[1]。未來深空探測領域將呈現“近地軌道-地月空間-火星”的發展趨勢[2],月球作為深空探測前沿,必將成為各航天強國的首選探測目標[2]。據《2021 年中國航天白皮書》,我國將在2030 年前實現載人登月,之后將建造月球科研站。月球科研站不僅是解決關鍵月球科學問題、實現重大原創科學發現的有力工具,而且還是推動航天技術跨越提升、促進多學科融合發展的重要引擎[2]。月球科研站任務系統復雜,挑戰艱巨,必須在實施登月階段開展方案論證和系統設計,并對制約任務實施的關鍵技術早布局,為后續任務順利實施奠定基礎。
基于此,本文擬設計面向月球科研站任務的地月準實時遙操作模擬驗證系統,提出基于海量多尺度遙感數據的聯合處理方法,研制基于空地多運動平臺協同定位的原型軟件,并開發帶有力覺反饋的預測仿真驗證平臺。以期能夠在地面環境中真實還原遠端的遙操作作業場景,提高遙操作的執行效率和準確性,為地面人員的方案設計、操作手訓練、故障處置等提供實時支持,為我國月球科研站任務的實施奠定基礎。
1 月球科研站遙操作特點難點
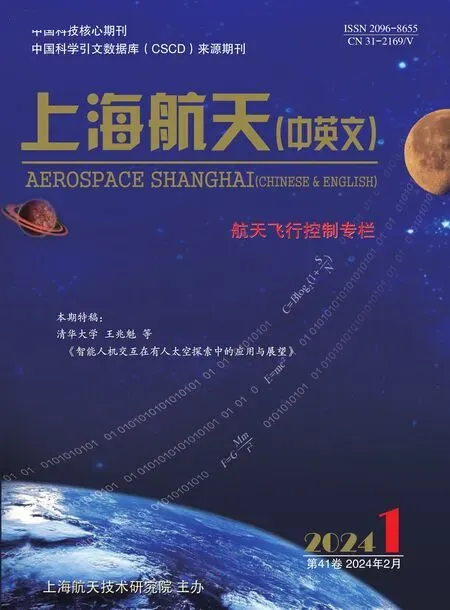
我國在2020 年完成“三步走”之后,月球探測目標逐步轉變為“科學深化研究與資源開發利用”,“無人”和“有人”這2 種探測形式進行同步開展、互為補充[2],如圖1 所示。具體包括:繼續開展無人探測[3],建立機器人月球科研站能力體系;同步實施有人探月技術攻關,重點突破重型運載、載人地月往返、月面航天員出艙等關鍵技術[4];進行人-機聯合探測,實現月球資源開發利用,促進可持續發展[2]。
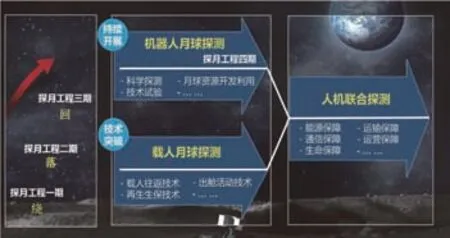
圖1 我國月球探測未來發展特點[2]Fig.1 Future development characteristics of the lunar exploration in China[2]
月球科研站建設是一項綜合的系統工程,需要完成空間建造、太空制造、天文觀測、生物實驗等科學任務。其中,遙操作系統負責整個科研站部件單元和各個運動平臺的指揮、控制與協同,是月球科研站運行的“神經中樞”,具有極其重要的地位。此外,宇航員也將參與月面活動,以遙操作的方式控制月球車或者月面機器人單獨、伴隨或聯合作業,將面臨更大風險。月球科研站任務對巡視探測的范圍、效率、精度等需求會明顯提高,能主動發現感興趣的科學目標,最終實現精準探測[5]。受天地間傳輸距離影響,數據通信過程中會有較大時延,且一旦時延超過一定限制會使連續的閉環系統變得不穩定,普通抑制時延的控制算法又很難保證大時延下遙操作系統的穩定性和安全性[6]。因此,新的任務需求遙操作系統向更高效、更智能、更安全的方向發展,以滿足未來復雜地形條件下實施大范圍、遠距離、高效、精準的科學探測任務需求。
目前月面遙操作系統通常采用以下方法:首先操作人員在地面搭建一套遠程集中監控系統,等待月面機器人系統回傳月表圖像及其他傳感器信息;然后對事件或路徑進行決策;最后以遙操作的方式控制月面機器人執行相應命令[7-9]。這種方式能夠解決單一任務、單個對象、簡單場景的遠程控制,但面對系統非線性高、耦合性強、可靠性要求較高[10]的月球科研站這類多操作者(協同)的高度復雜任務,遙操作系統在大范圍、高精度、高實時性、智能化等方面還須進一步提升和加強。
2 準實時遙操作模擬驗證系統構建
針對當前月面遙操作系統控制效率較低的問題,設計了基于狀態預測修正和混合現實(Mixed Reality,MR)的地月準實時遙操作模擬驗證系統,如圖2 所示。初始化階段,MR 仿真子系統利用全球遙感數據進行大范圍三維重構、渲染和地形增強顯示,在地面控制中心構造靜態虛擬月面任務場景[11]。接著,依靠重建的月面任務場景(主要指月面環境和月面機器人數字模型),地面操作人員通過人機交互子系統操控虛擬機器人運動,生成運動指令,并發送至預測修正子系統進行預先仿真(包括機器人的位置、速度、姿態等),經驗證無誤后再發送至月面真實機器人。等待各類傳感器數據下傳至地面(數據量和延時均較小),預測修正子系統首先對虛擬機器人的狀態進行參數辨識,完成短周期預測修正,然后再根據月面圖像(數據量和延時均較大),對虛擬機器人的位姿進行進一步精化以實現長周期預測修正。期間,MR 仿真子系統同步更新虛擬機器人狀態及任務場景,從而使地面操控人員能夠感受與真實月面任務延時同步變化的高臨場感任務場景。
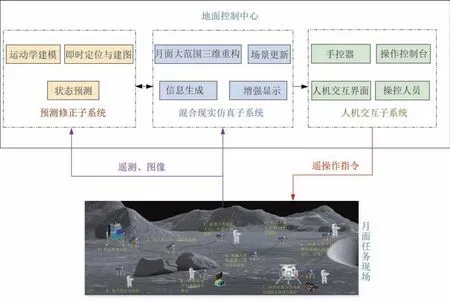
圖2 基于MR 的地月準實時遙操作系統控制方案[1,11]Fig.2 Control scheme for the Earth-Moon quasi-real-time teleoperation system based on MR[1,11]
基于以上分析,本文從月球科研站多目標大區域協同探測需求出發,梳理了構建地月準實時遙操作模擬驗證系統需突破的關鍵技術,如圖3所示。
圖3 遙操作關鍵技術Fig.3 Key technologies for teleoperation
1)海量多尺度遙感數據環境感知技術
遙感測圖是深空探測任務的一項重要工作,通過搭載的相機等傳感器實現地外天體表面多尺度的二維、三維制圖是獲取地外天體形貌和構造信息的基本手段。月球科研站任務需通過全球遙感數據制作全月大范圍或局部高分辨率的地形產品,支持未來深空探測任務的科學目標制定、月球地質構造成因和演化研究、安全著陸區選址等科學研究和工程任務[2,12]。未來,探測范圍將由公里級擴展至百公里級以上,新的任務需求遙操作系統具有統一的大范圍感知結果。然而深空探測任務因軌道姿態測量精度較差、易受時變光照和復雜地形等環境因素影響,使得月球遙感測圖極具挑戰[13]。因此,為將這些不同范圍、不同分辨率的遙感數據進行融合感知,需研究全球可覆蓋千公里范圍的多任務、多尺度的海量遙感數據融合處理方法,實現多層次、多尺度的遙感數據優化融合[14]。
2)空地協同高精度定位技術
隨著機器人移動、人工智能、協同操作技術的發展,在月球科研站任務中,宇航員、有/無人月球車、月面機器人等平臺的運動性能將不斷增強,從而對各運動平臺的定位能力提出了更高的要求。無人月球車、宇航員、月面移動機器人等各移動平臺需要按照已經制定的探測計劃,在著陸區一定范圍內開展實驗組件布設、巡視探測、科學考察及月壤或巖石的采集等工作。這些操作的執行,尤其是對較遠距離(公里級)的探測,都離不開精確導航定位技術的引導。由于月面環境的特殊性,現有地面成熟的移動導航定位技術并不適用[15-16],需結合地月遙操作系統組成特點,研究空地協同的一體化定位框架,突破月面長距離、超視距導航定位技術瓶頸。
3)基于MR 的預測仿真技術
月球科研站任務中有許多如獲取月球樣品、樣品的物理特性分析、移動設備抓取等接觸性遙操作,尤其在精細操作方面,力覺的重要性更是突顯。視覺、力覺等感覺系統的相互配合,能夠更好地實現對各種形狀、尺寸、質量目標的自適應抓取。對遙操作接觸力的預測和仿真,可以有效減少碰撞或接觸力過載的風險[17]。通過研究基于MR 的預測仿真技術,尤其是加入了遙操作力覺建模和預測,可以有效避免直接與遠程執行機構交互的時延影響,提高遙操作過程中的感知和決策能力。
3 海量多尺度遙感數據環境感知技術研究
目前全球制圖產品的分辨率一般較低,主要用于提供著陸區宏觀的地形、地貌信息,無法支撐巡視探測任務的中、短期任務規劃和局部精細地形、地貌的分析。局部制圖產品盡管分辨率較高,但覆蓋范圍有限。此外,各國對于月球探測數據的基準不統一,不同探測任務遙感數據存在較為明顯的幾何偏差[13]。隨著月球科研站任務的不斷深入,無人月球車、宇航員、月面移動機器人等平臺將不斷獲取局部更高或超高分辨率的感知數據,可將這些高精度數字高程圖(Digital Elevation Map,DEM)與先驗不同數據源的DEM 進行高效融合,以形成大范圍、統一、無縫的月球科研站感知結果。本文首先構建多源軌道器影像的統一平差模型,實現對多重覆蓋影像的優化處理,消除其中的不一致性,得到基于先驗數據的大范圍感知結果;然后建立多分辨率地形融合模型,融合高分辨率的感知結果;最終得到無縫的感知結果,流程如圖4 所示。
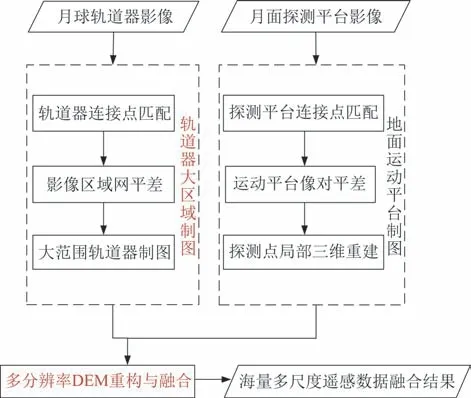
圖4 海量多尺度遙感數據環境感知算法流程Fig.4 Flowchart for the environment awareness algorithm based on massive multi-scale remote sensing data
3.1 基于兩步法的軌道器大區域制圖
大區域影像制圖需處理的軌道器影像數據量繁重,同時解決全部影像的精化模型會帶來效率較低且精度難以滿足要求等困難,此外還需解決影像與控制數據之間的幾何不一致性。針對上述問題,采用一種“兩步法”的軌道器大區域制圖策略[18-20]。
首先建立軌道器影像的成像幾何模型,然后依據預選著陸區范圍對軌道器影像進行分區。對于每個分區,先對影像進行區域網平差處理,以消除影像間的幾何偏差以及影像與控制數據間的幾何不一致性,然后再對各影像進行正射糾正和均光鑲嵌。為了解決分區影像間的幾何不一致性,設計了基于TPS 模型的配準校正方法。令制圖中心位置的數字正射影像圖(Digital Orthophoto Map,DOM)為基準,將附近相鄰DOM 與基準DOM 進行配準,配準校正后的DOM 則成為后續其他相鄰DOM 的基準,以此類推,最終可得到高精度、大區域、幾何無縫的制圖產品,具體見文獻[19]。
3.2 多分辨率DEM 重構與融合
由于月球科研站需使用大范圍的感知產品,而這些先驗的DEM 大部分分辨率不一致,且多個DEM 間重疊度不均一。本文采取一種由初至精的點云配準方法,使不同分辨率的點云能夠自動配準。初始配準主要是減小點云之間的旋轉和平移錯位,保證后續匹配不致朝向錯誤方向。精細配準采用非剛性最近點迭代法(Non-Rigid Iterative Closest Point,ICP)算法,通過求出代價函數的最小值實現點云精確配準[21]。在進行點云初始配準時,首先通過比較高、低分辨率點云的快速點特征直方圖(Fast Point Feature Histogram,FPFH)特征,找到歐式距離最近的幾個點組成關鍵點集,然后再通過采樣一致性初始配準算法(Sample Consensus Initial Alignment,SAC-IA)實現剛體變換優化[22],為后續精確配準提供較好的初始位置和方向。
3.3 實驗結果
采用無人機、激光雷達、ZED(配手持云臺)等分別獲取試驗區的高分辨率點云和地面序列影像。試驗區選取我國甘肅省金昌市金昌試驗基地,如圖5 所示。其中,圖5(b)、圖5(c)為人工制作的撞擊坑。其中,無人機獲取的DEM 分辨率為0.02 m,經重采樣后轉化為1 m 分辨率,地面立體相機生成的地形數據分辨率為0.04 m,如圖6 所示,其中:同步定位與地圖構建(Simultaneous Localization and Mapping,SLAM)融合后的結果及精度驗證如圖7 所示,其中,圖7(a)、圖7(b)分別為融合前、后點云的接近圖,可以看出,融合后點云的貼合度更高。實驗中,利用GPS 測量了實驗區的7 個控制點,對比控制點的平面位置結果,融合中誤差優于0.07 m。
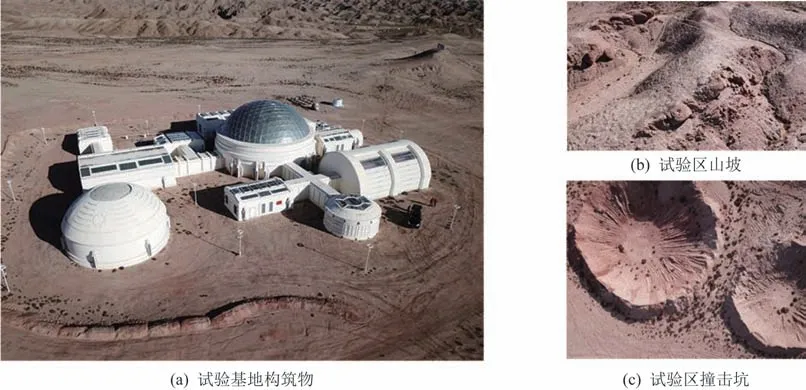
圖5 金昌實驗基地Fig.5 Jinchang experimental base
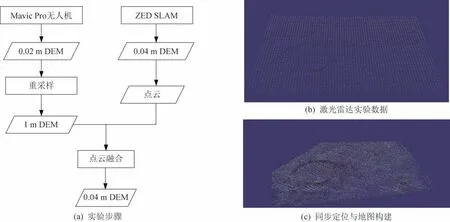
圖6 實驗步驟和實驗數據Fig.6 Experimental procedure and the related experimental data
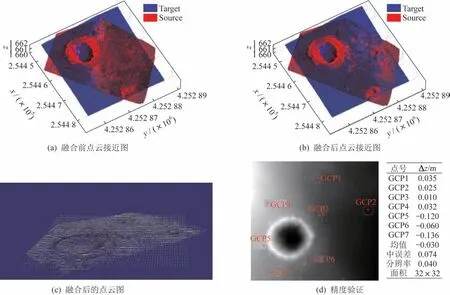
圖7 融合后的實驗結果及精度驗證Fig.7 Experimental results before and after fusion and the accuracy verification
4 空地協同高精度定位技術研究
高精度導航定位作為深空探測任務的關鍵技術,在探測目標接近、路徑規劃和安全避障等方面發揮著至關重要的作用[14]。本文研究了無/有人月球車、宇航員等多平臺的運動特性,綜合利用慣導、視覺等數據,通過組合導航的方式實現了各探測平臺的高精度定位,解決了視覺測程定位在貧紋理區域不易進行連續特征跟蹤、無法實現穩健定位的難題。在此基礎上,研究基于極坐標系的軌道器數據(空)與地面(地)數據的特征關聯方法,利用軌道器觀測結果對探測平臺的定位結果進行約束與優化,突破了長距離移動各平臺定位的累計誤差瓶頸,從而實現遠距離、超視距、高精度、穩健定位,相應技術路線如圖8 所示。
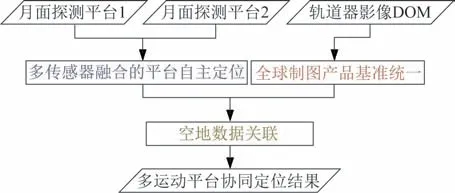
圖8 空地協同高精度定位算法流程Fig.8 Flowchart for the high-precision localization algorithm based on air-ground collaboration
4.1 多傳感器集成的運動平臺定位
本文提出了一種基于立體序列影像、同慣導集成的運動平臺、多傳感器集成的定位方法[23]。針對立體影像特點,在進行高精度相機標定前提下,通過ORB 算法提取序列立體影像上的特征點,如圖9所示。基于特征點匹配關聯,結合慣性測量單元(Inertial Measurement Unit,IMU)數據,估計相鄰幀間的運動,最后通過多幀圖像慣導數據的光束法平差完成運動平臺位置參數估計。
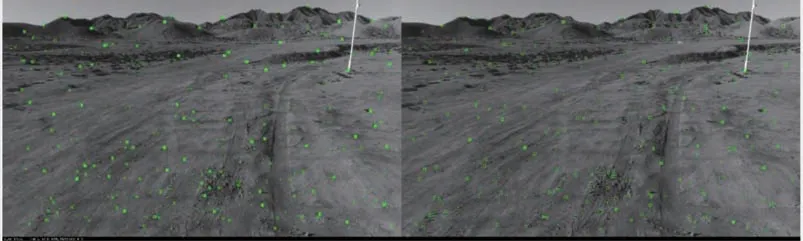
圖9 立體影像特征點匹配Fig.9 Feature point matching between stereo images
由于IMU 獲取數據頻率高于立體相機,無法直接利用IMU 數據計算得到位姿的變化結果。因此,需對IMU 數據預積分,使得IMU 數據與視覺信息對齊。預積分方式為式(1)~式(3),其中式(1)為相對旋轉矩陣積分、式(2)為相對速度積分、式(3)為相對位置積分:
式中:為k時刻角速度值,弧度/s;為陀螺零偏,弧度/s;為陀螺白噪聲,弧度/s;為i時刻慣導姿態矩陣轉置;為j時刻姿態矩陣;為j時刻速度矢量,m/s;為i時刻速度矢量,m/s;g重力加速度,m/s2;Δtij為i~j時刻間時長,s ;分別為i和j時刻的位置矢量,m;為i時刻速度,m/s。
4.2 全球制圖產品基準統一
進行空天協同定位處理的前提是擁有基準統一的軌道器制圖數據。本文提出了一種基于球面三角網的全月產品高精度配準方法[24]。該配準方法直接使用球坐標進行全局配準,能有效避免復雜的地圖投影變換導致的變形問題,從而切實提高校正精度[25],主要步驟如圖10 所示。
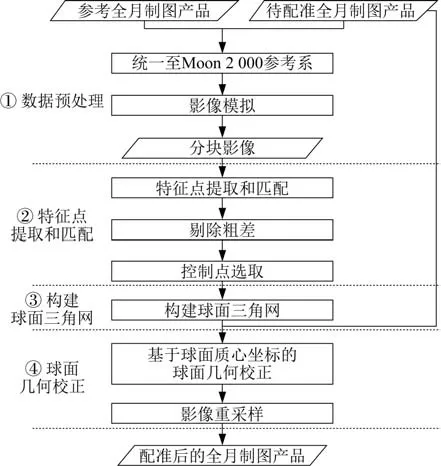
圖10 基于球面三角網的全月產品高精度配準算法流程[26]Fig.10 Flowchart of the high precision registration algorithm based on spherical triangular meshes for lunar global mapping products[26]
在數據預處理時,為了將復雜的3D-3D 或3D-2D 匹配轉換為2D-2D 匹配,利用Hill shading 方法首先將DEM 處理為模擬影像,后續對單模和多模態制圖產品進行特征點提取和匹配時,再分別采用ASIFT 算法和CFOG 算法。基于球面質心坐標進行幾何校正的實質是將待配準球面三角形的頂點位置轉換至對應參考球面三角形的頂點位置。
本文采用ALFELD 等[27]給出的方法定義球面重心坐標。令球面三角形P3個頂點的集合為V={v1,v2,v3},ni為平面Pi(Pi=span(V{vi}),i=1,2,3)的單位法向量。那么,對于球面S上的任意點v,有:
式中:αi為平面Pi與向量vi的方向角(Oriented Angle),(°);β為平面Pi與向量vi的相似角(Analogues Angle),(°)。
如圖11 所示。那么,球面三角形P內任意點v的球面重心坐標λi可用式(5)計算:
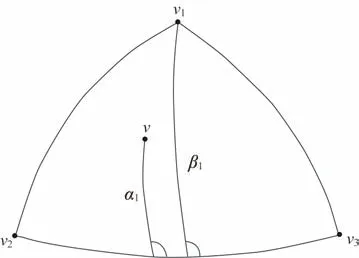
圖11 式(5)計算球面重心坐標[26]Fig.11 Spherical barycentric coordinates calculated by Eq.(5)[26]
記參考球面三角形為P′,其頂點為V′={v1′,v2′,v3′},各頂點位置可通過式(6)計算:
4.3 空地數據關聯
在進行空地協同定位時,月面各運動平臺與軌道器影像間關聯的建立是精準定位的前提和基礎。空地數據間分辨率差異較大,并且地面探測車DOM結果與軌道器數據屬于不同傳感器獲取的數據,兩者之間灰度特性存在差異。同時,探測車DOM 的紋理受視角變化影響,存在紋理幾何變形。因而,通常情況下難以直接進行空地數據的關聯。本文結合地面探測車DOM 的數據特點,采用基于極坐標分布的空地信息配準策略[26],如圖12 所示。
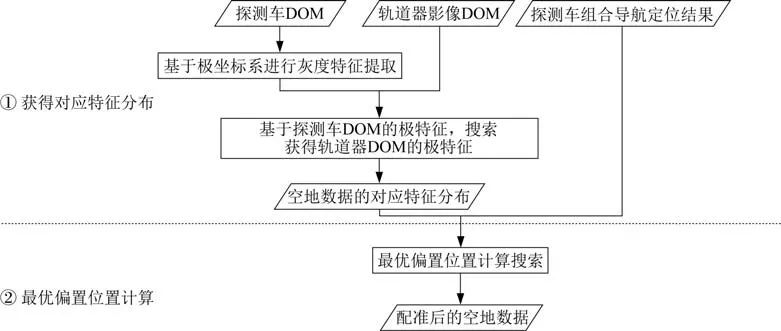
圖12 空地信息配準算法流程Fig.12 Flowchart of the air-ground image registration algorithm
首先基于極坐標系,在某個極方向對地面探測車DOM 進行灰度特征提取,得到的特征集合為Flr={flri,i∈PN},其中,flri為極特征,PN為極方位角范圍。然后根據得到的極特征flri的距離參數和方位參數,在軌道器DOM 的對應位置周圍搜索選取相應的特征,記得到的特征集合為Fhr={fhri,i∈PN}。依次對余下極方向按照一定的間隔進行特征點提取,便可獲得全部空地數據的對應特征分布。然后以探測平臺組合導航的定位結果作為初值,在其誤差范圍內進行最優偏置位置計算搜索,選取相似度最高的作為最終關聯結果,完成空地數據配準。記S(Xoff,Yoff)為偏移位置為(Xoff,Yoff)時空地影像間的整體特征相似度,可用式(7)來計算:
式中:n為圖像中特征點的個數;S為某個特征的相似程度值;c為特征權重;可分別用式(8)和式(9)計算:
式中:phi、poi分別為對應Fhr與Flr的極性值;γ為預設系數;d為特征距離原點的距離。
4.4 實驗結果
1)多運動平臺聯合定位
在試驗區利用雙目圖像及自帶慣導進行集成定位測試,探測車行走閉合環,軌跡如圖13 所示。實驗過程中,總行駛里程為268.5 m,閉合差為1.68 m,定位精度為行駛里程的0.63%(優于1%)。
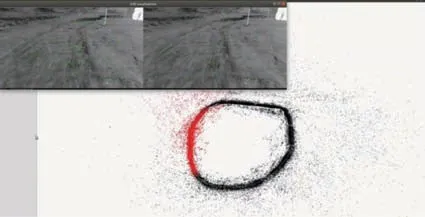
圖13 視覺+慣導閉合行駛路徑Fig.13 Closed travel path based on vision+inertial navigation systems
2)全球制圖產品融合
以Moon Clementine UVVIS Warped Color Ratio Mosaic 200 m[28]作為參考,對CE1_TMap_GDOM_120 m[29]進行配準校正。參考數據的空間分辨率為200 m/pixel,待校正數據的空間分辨率為120 m/pixel,平面定位精度為100.0 m~1.5 km[30]。
在數據預處理時,將2 個數據按照經緯度劃分為規則的影像塊,對于高緯度區域還需進一步轉換為極方位立體投影。然后采用多模態圖像匹配方法[31],將其進行特征點提取與匹配,并用RANSAC算法剔除粗差。接著在每個影像塊內部劃分若干個不規則的三角網,選取距離格網中心最近的點作為后續構建球面三角網的控制點。共劃分50×50 個格網,選取了131 082 個控制點,中心坐標為(45°E,45°N)的某30°×30°影像塊的匹配結果如圖14 所示。把參考數據和待校正數據視為相同的拓撲結構,利用匹配的控制點分別構建兩者的球面Delaunay 三角網,即完成了全局配準至局部配準的轉換。
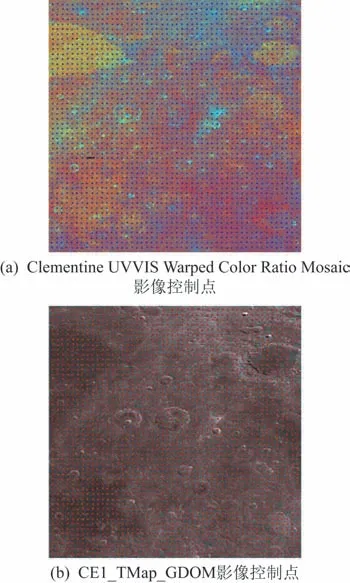
圖14 中心坐標為(45°E,45°N)的某30°×30°影像塊匹配結果[24]Fig.14 Matching results of a 30°×30° image block centered at(45°E,45°N)[24]
隨機選取16 377 個檢查點定量分析配準的精度,以1°為采樣間隔制作彩色編碼圖,如圖15 所示,分別為配準前后檢查點的平面殘差分布。可以看出,處理前2 個數據的平面不一致性較大,殘差分布很不均勻,呈現出月球背面大于月球正面、南半球大于北半球的特點,最大殘差值超過5 000 m。進行配準校正處理后,產品與參考數據的平面殘差大幅減小,且分布較為均勻,表明了方法的有效性。

圖15 配準前后平面殘差分布[24]Fig.15 Planimetric difference maps before and after registration[24]
3)空地協同定位
為驗證協同定位算法的有效性及精度,開發了協同定位原型軟件。通過該軟件可以獲得真實的位姿信息、立體影像數據,并基于仿真過程的相關信息對定位結果進行定量評價。實驗中,利用該軟件控制探測車按照預設行駛路徑生成500 幀立體影像,并同步將仿真的立體影像位置輸出作為評價參考。探測車在行進過程中,近實時地將地面影像與軌道器數據進行匹配,利用定位結果將地面DOM疊加至軌道器DOM上,如圖16所示。其中,軌道器DOM 的分辨率為1 m,探測車DOM 的分辨率為0.1 cm。以仿真影像的真實位姿參數為參考,評價實驗過程中探測車定位算法的精度,得到協同定位平均誤差為0.677 m。
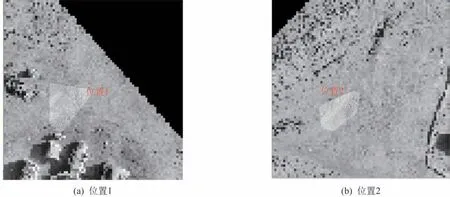
圖16 空地協同定位精度Fig.16 Localization precision results based on air-ground collaboration
5 力覺預測與顯示驗證技術研究
為了減少傳輸時延對遙操作穩定性的影響,采用力覺預測的方式,解決欠采樣情況下力反饋不足的問題。運用基于模型修正的遙操作力覺預測和反饋方法,搭建力覺預測與顯示驗證平臺。以視覺顯示和力覺反饋相融合的方式給操作者提供增強的力覺反饋[32],如圖17 所示。首先,轉運機械臂按照預先設定的軌跡自主移動,操作者控制主端的力反饋設備,并將其運動信息傳輸至虛擬(環境中的)精細機械臂。接著,仿真整個作業任務過程。最后,經由網絡服務器(Socket 通信)將主端虛擬環境中的全部運動信息(包括精細機械臂和轉運機械臂)傳遞到從端。為了保證機械臂運動軌跡在上述兩種(虛擬、真實)環境中完全一致,本平臺采用增強現實技術,將從端機械臂末端的運動路徑疊加顯示至真實場景中。
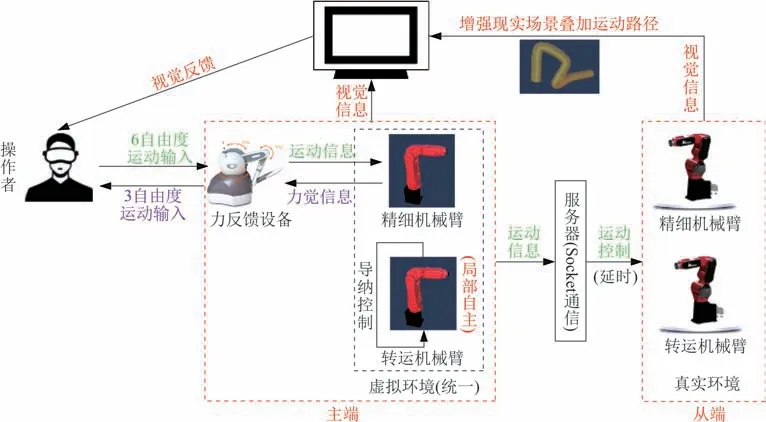
圖17 力覺預測與顯示驗證平臺架構[32]Fig.17 Architecture of the force prediction and display verification platform[32]
5.1 平臺軟硬件組成
模塊主要包括:仿真控制計算機、投影顯示系統、力反饋設備、操作面板、后臺處理單元等,可實現人機交互輸入、遙操作力覺反饋,操作場景展示,時延數據傳輸等,其實物組成如圖18(a)所示。操作者對操縱手柄、操作面板、力反饋設備和仿真控制臺交互,仿真控制計算機負責執行場景運算、虛擬力預測、時延處理和仿真渲染等,控制流程如圖18(b)所示。
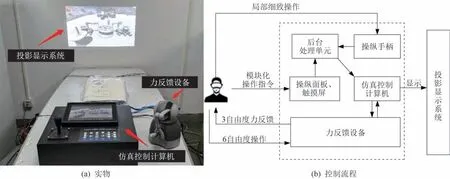
圖18 力覺預測與顯示驗證仿真控制臺組成Fig.18 Composition of force prediction and display verification simulation console
5.2 力覺預測算法
操控對象與物體發生接觸時,兩者間不僅發生了碰撞力,還會產生接觸力[32]。本文使用彈簧-阻尼-質子線性模型(MBK 模型[33])表達接觸力,如式(10):
式中:f(t)為接觸力的大小,N;x(t)為操控對象穿刺到碰撞對象的深度,m(t)為操控對象穿刺到碰撞對象的速度,m/s;(t)為操控對象穿刺到碰撞對象的加速度,m/s2;m為x(t)的系數;b為(t)的 系數;k為(t)的系數。
在虛擬環境中,需要對環境中的接觸力進行計算和預測。為解決力反饋信息不連續問題,搭建了簡化的RNN 模型如圖19 所示。訓練時,安裝六維力傳感器至真實機械臂末端,共采集有效數據190 組。隨機選取10%的數據作為驗證集,其余作為訓練集。經實驗,發現batch size=2 時,效果最好。隱藏層為2、節點數為30 時,RNN 模型的訓練結果見表1。

表1 RNN 模型不同參數的訓練結果[32]Tab.1 Training results of the RNN model with different parameters[32]

圖19 RNN 簡化模型Fig.19 Simplified RNN model
采用訓練后的網絡對按壓力進行預測,預測值與真值的對比如圖20 所示。考慮在按壓物體的過程中,與其他五維力相比,僅Z方向的力會有明顯變化,故在圖中只顯示該方向的力變換。可以看出,與真實力相比較,預測曲線的整體變化趨勢與真值較為一致。但對力的峰值估計還有一定誤差,不過也在可接受的范圍之內。
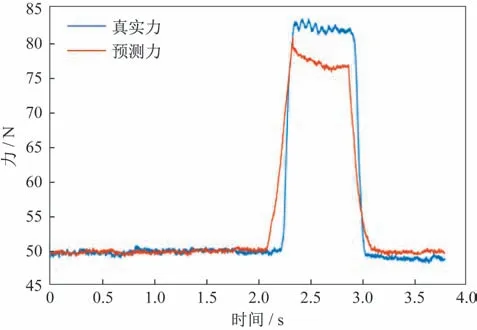
圖20 預測力與真實力對比[32]Fig.20 Comparison between the predicted force and true force[32]
5.3 實驗結果
針對月面多機器人協作搬運和維護作業搭建了仿真操作場景,利用力覺預測與顯示驗證平臺進行了帶有力覺反饋和顯示的雙機械臂協同搬運操作實驗。轉運機械臂完成范圍較大的運動,搬運構件到達搬運目標點附近后,再由精細機械臂引導搬運構件至目標位置。引導過程中的作用力反饋至仿真控制臺,經計算和預測后,再將力覺信息反饋給操作者。在場景中通過接觸點的顏色變化,可動態實時更新力覺信息,方便操作者對操作數據和實驗結果進行調整。地面操作者通過手控器控制精細機械臂完成裝配任務如圖21 所示。其中,精細機械臂末端法蘭通過物體自身的溫度梯度圖顯示末端受力的大小及方向。實驗表明:采用力覺預測的方式可以給操作者以真實的力覺感受,減少操作者的力覺認知負擔,實現更加自然的人機交互。
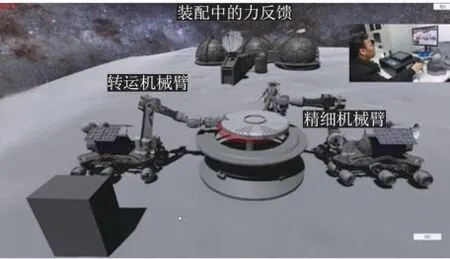
圖21 月球科研站任務力覺遙操作仿真驗證界面[32]Fig.21 Simulation verification interface of the force teleoperation for lunar scientific research stations[32]
6 結束語
基于狀態預測修正和MR 技術設計了面向月球科研站任務的地月準實時遙操作模擬驗證系統,對其中的大區域環境感知、空地協同定位、力覺預測與顯示等關鍵技術進行了重點研究,取得了較好的實驗效果,開發的相關原型軟件和仿真驗證平臺可用于后續深空探測或載人登月任務遙操作軟件功能的驗證和操作人員訓練。月球科研站任務所亟需的遙操作系統,未來應向真實感和沉浸感更強、穩定性和安全性更高、交互更自然、操作感受更直觀的方向發展。面向中國探月工程四期、小行星探測等重大任務,開展面向星表巡視探測系統的自主感知與智能操控等關鍵技術研究,充分利用人工智能技術為深空探測器“增智賦能”意義重大[5]。