側掃聲納、多波束掃測在航道應急搜尋中的綜合應用
2023-10-20 00:48:16劉愛華
運輸經理世界 2023年17期
關鍵詞:設備
劉愛華
(福建省港航勘察設計院有限公司,福建福州 350002)
0 引言
隨著我國航運行業的發展,水路貨運量不斷上升,航道中貨運船舶往來越來越密集,這便不可避免地會出現集裝箱掉落等不可預見的事故。為最大限度地降低這些事故對航道正常運行的影響,需要以最快速、最高效的辦法準確確定集裝箱掉落的位置,進而為打撈集裝箱、促進通航順暢提供保障。在進行應急測量時,綜合利用現有的技術手段可以提高應急搜尋效率。
在應急測量中,常用的測量設備有單波束測深儀、多波束測深儀、側掃聲納系統等。單波束測深儀可獲得線狀水深,按照常規集裝箱尺寸測線,按照5m布設,單天單船掃測面積約0.3~0.5km2;多波束測深儀可獲得全覆蓋面狀水深,掃測時測量船速6 節左右,預計每天有效作業時間7h,每天工作量約70km,多波束有效測深寬度為水深的4~5 倍,綜合計算,單天單船掃測面積約3.5km2;側掃聲納系統可獲得海底全覆蓋地貌,按照同樣的船速和有效工作時間來計算,單天單船掃測面積約5.6km2。
單波束測深手段在多波束測深技術發明前一直在海洋測量中發揮重要作用,其缺點是信息量少、效率低;多波束測深手段可以獲取精確的水深和定位數據,且具有效率高、信息量大、分辨率高等優點,缺點是對船型選擇、安裝條件要求高,不適用于描述地物的輪廓;側掃聲納掃測手段可以快速獲取清晰的海底聲像圖,具有實時判讀海底地物的優點,缺點是無法獲取準確的水深數據和較精確的定位信息。綜上,單波束測深手段是上述三種技術手段中最低效的,多波束測深、側掃聲納掃測手段顯然更高效,都能確保目標測區全覆蓋、無遺漏。不過這兩種掃測手段也存在各自的優缺點,側掃聲納能得到高分辨率的二維海底地貌圖,并根據海底回波強度信息定性分析海底介質的組成[1],在效率上優于多波束,能夠更高效、更快速地判讀海底目標物,但在定位精度上不如多波束手段;多波束能精確水深數據和位置信息,在定位精度上優于側掃聲納手段,但在效率上略低于側掃聲納手段。
在應急搜尋測量時,如何最大限度地發揮側掃聲納和多波束兩種手段各自優勢,來更快速更高效地完成應急掃測任務,成為現在航道應急掃測應用研究的方向。
1 側掃聲納
側掃聲納是一種利用回聲測深原理探測海底地貌和水下物體的設備,又稱旁側聲納或海底地貌儀。“側掃”指的是這種聲納系統不是掃測正前方的水域情況,而是對兩側水下環境進行監測。同時,這種聲納通過拖動海床上方的拖魚聲納探頭,能夠形成該水域環境的圖像數據。側掃聲納系統的工作原理是換能器基陣向測量船航向正下方兩側傾斜發射聲波,并接收兩側一定寬度內的海底目標和地貌的反向散射聲波,返回聲波信號的強弱即可反映海底起伏和地質軟硬信息。
每一次發射均可獲得換能器兩側一窄條海底或地物的回波信號,利用工作站對回波信號進行處理,顯示在顯示器上為一條橫線,橫線上每一點所顯示的位置與亮度分別與回波到達的時刻及回波信號強度相對應。將每一次發射所獲得的回波信號一線接一線地縱向排列顯示在顯示器上,便能得到一幅反映海底地貌特征的二維聲像圖,聲像圖能夠以不同的顏色或不同的黑白程度反映海底地貌的特征。根據聲像圖可以快速發現可疑物體,并判斷出物體的性質、大小和形狀[2]。
目前應用的側掃聲納設備一般具有高、低兩種頻率,且可以同步采集。高低頻的采集數據對不同水下的目標物具有不同的分辨能力和識別能力。
2 多波束掃測
多波束測深系統又稱為多波束測深儀、條帶測深儀或多波束測深聲納等,它是一種多傳感器組成的復雜系統,能同時獲得多個相鄰窄波束的回聲。其工作原理是利用發射換能器陣列向海底發射寬扇區覆蓋的聲波,利用接收換能器陣列進行窄波束接收,能得到上百個被測點的水深值,可以快速測出沿航線方向一定范圍內水下目標的大小、形狀和高低變化,形成三維點云圖像[3]。
3 工程實例
某集裝箱運輸公司所屬輪船于2021 年8 月5 日03:00 在某港2#錨地發生集裝箱落海事件,共有13 個空集裝箱落水,集裝箱規格均為40 尺(約13.33m)高柜,其單個內尺寸為:12032×2352×2698(mm)。集裝箱掉落水域附近涉及該港重要航道,所涉及的水域范圍廣、航道通航密度大,因此需要以最快速、最高效的辦法準確定位出掉落的集裝箱并進行打撈,排除航道礙航風險,盡早恢復通航。
由于時間緊、任務量大,項目組經過仔細分析商討,確定采用側掃聲納對掉落的集裝箱進行初步搜尋,確保測區全覆蓋、無遺漏,采用多波束對航道重點水域及側掃聲納掃測過程中獲取的疑似集裝箱掉落的位置水域進行精確定位,獲取集裝箱的位置、凸出海底面的高程,以及掉落集裝箱附近水域的實際水深情況,為后續打撈工作提供數據支持。
3.1 側掃聲納外業實施
3.1.1 側掃聲納設備安裝調試
設備采用Klein490 側掃聲納系統,將側掃聲納設備的拖魚聲納探頭在測量船一側拖曳入水,入水深度為1.5m 左右,準確量取GPS 天線與側掃聲納拖魚的相對位置,以便進行定位校正(見圖1)。安裝完成后,測量船以低航速平穩航行,接通電源測試整套設備,確保設備各單元正常工作,各項參數符合要求。接著測量船在穩定的航速和航向下進行掃測。
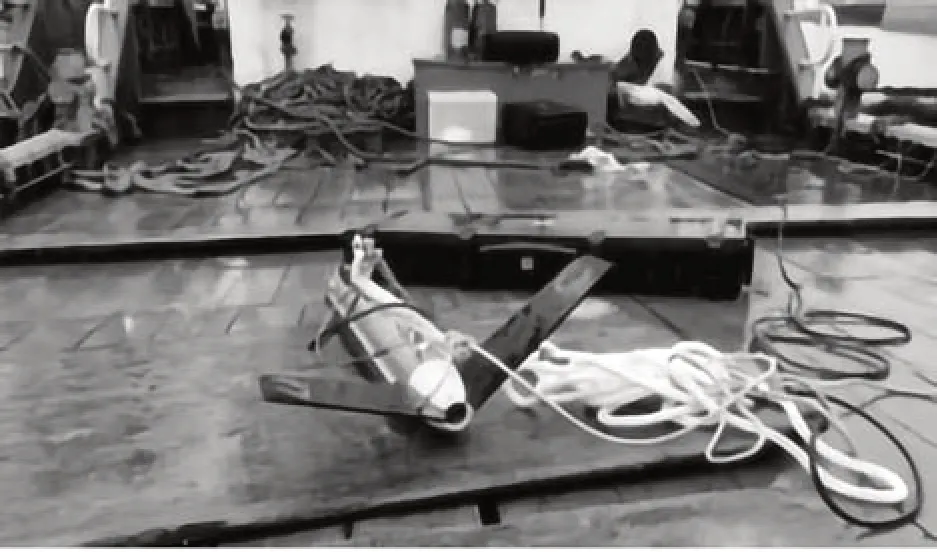
圖1 側掃聲納現場安裝調試圖
3.1.2 側掃聲納掃測實施
掃測實施時海況符合測量要求,設備儀器及軟件系統運轉正常。正式掃測前,在掃測區域進行試測。調節采集軟件各單元設備收發參數,確保采集到清晰可見、辨別度高的聲學圖像(見圖2)。掃測時,將測量船的航速設置為不大于7 節,技術人員實時對聲學圖像的清晰度和可辨識度進行評估,若信號質量不穩定或聲學圖像質量不滿足后處理要求,需及時調整相應的參數,確保信號質量穩定。
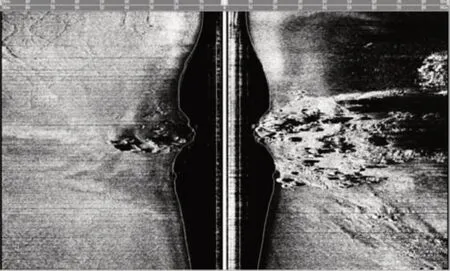
圖2 側掃聲納瀑布圖
3.2 多波束掃測外業實施
3.2.1 多波束掃測設備安裝調試
設備采用SeaBat T20-P 多波束測深儀,設備應安裝在距船頭二分之一船長處,吃水1.18m。在測量船首尾線上中部重心較低的位置安裝羅經傳感器,并使其北方向指向船首,方向線與船首尾線平行。測定設備的安裝坐標,將測得的坐標輸入導航及采集軟件中。連接各組設備,接通電源檢測整套系統。掃測前對橫搖偏差(Roll)、縱搖(Pitch)、艏搖(Yaw)等參數進行校準(現場安裝調試情況見圖3)。

圖3 多波束現場安裝調試圖
3.2.2 多波束掃測實施
多波束掃測針對航道的重點水域及側掃聲納過程中疑似集裝箱掉落的位置水域進行掃測。
多波束系統安裝完成后,準確量取羅經和探頭、傳感器以及GPS 等設備、系統的相對位置,然后在采集和導航軟件中輸入這些位置信息。平面定位儀器采用Trimble SPS 461,導航軟件采用PDS2000。
內業處理軟件采用軟件Caris Hips 9.0,用以處理內業數據,最終按照1∶10 的密度要求(測點間距0.1m)進行抽稀輸出數據,三維數據點云圖見圖4。
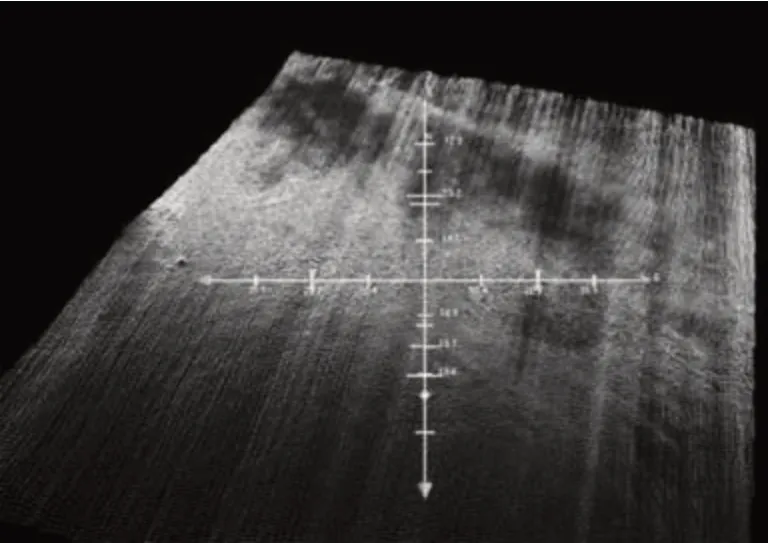
圖4 三維數據點云圖
3.3 掃測結果
通過3d 對重點航道、重點水域全覆蓋掃測,共計完成測線192km,多波束掃測疑似區2.5km2,發現疑似點如圖5、圖6 所示。結果比單獨采用側掃聲納或多波束掃測方式提前約2~3d。可見綜合采用兩種技術手段,可以大大提高搜尋掉落集裝箱的效率,更快速恢復航道正常通航,避免造成更大損失。
圖5 側掃聲納疑似點圖

圖6 多波束疑似點圖
3.4 經驗啟示
3.4.1 考慮到此次掃測期間潮差大、水流急,如果集裝箱沒有沉沒而是隨潮流漂移,就很難搜尋定位。此時只能先確保主要通航水域沒有障礙物,但浮箱流向未知,需加強對重點水域進行動態監測。
3.4.2 在重大應急任務面前,需儲備足夠的支撐保障,既需要儲備足夠的專業、高效的應急掃測隊伍,同時也需要儲備足夠的能隨時調遣的多專業技術裝備等。
3.4.3 落水集裝箱漂移方向,是否埋入泥底等情況未知,若能掌握事發水域流場信息,能為判定落水集裝箱走向提供較大幫助。在日常,非常有必要提前對重點水域開展風場、水文、水流、海床等課題研究,儲備相關資料,建立流場模型,模擬掉落物、漂移物軌跡等,為制訂搜尋掃測方案提供參考,提高應急掃測效率,系統防范掉落物掉落對通航安全帶來的風險。
4 結語
上述案例表明,綜合采用側掃聲納和多波束兩種技術手段,相較于只使用其中一種技術手段,工作效率更高,有利于航道管理部門更快地搶通修復航道,能夠減輕和消除航道集裝箱掉落引起的危害,保證船舶航行安全。同時,綜合采用側掃聲納和多波束兩種技術手段,能夠取得更準確、更直觀的搜尋結果,提高應急掃海的效率,可為航道快速復航提供有力的數據支持。
隨著各種技術手段的進步,在未來,通過不斷實踐,更多、更新的測量技術手段將被綜合應用,會進一步提高應急測量的效率。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00