電動汽車充電樁電量遠程監控系統設計與分析
2023-10-17 06:10:54
農機使用與維修 2023年10期
關鍵詞:系統
(衢州職業技術學院,浙江 衢州 324000)
0 引言
電動汽車充電樁是專門用于為電動汽車充電的設備,類似于傳統汽車加油站中的油槍。可以將交流電或直流電轉換為適合電動汽車電池充電的電能。充電樁通常由充電頭、控制器、計量裝置和安全保護系統等組成[1-2]。電動汽車充電樁遠程監控是指通過互聯網等遠程通訊技術,對電動汽車充電樁進行實時監控和管理,可以實時了解充電樁的運行狀態、充電量、充電速度等信息,對充電樁進行遠程診斷和故障排除,以提高充電樁的可靠性和穩定性,同時也為電動汽車用戶提供更加便利和高效的充電服務[3]。
本研究基于GPRS網絡通信技術,旨在研究一套電動汽車充電樁遠程監控系統,對其關鍵部件的設計進行系統闡述,并提出未來電動汽車充電樁電量監控系統的主要發展趨勢。研究結果可以為用戶提供便捷、高效的充電服務,促進電動汽車充電基礎設施的建設和普及。
1 電動汽車充電樁遠程監控系統設計方案
電動汽車充電樁遠程監控系統設計方案如圖1所示,選擇 GPRS 模塊作為充電樁控制器與監控中心之間的通信方案,GPRS模塊可以提供移動通信網絡的連接,從而實現遠程監控和控制。GPRS模塊通信速度較快,數據傳輸穩定可靠,適用于實時監測和控制[4]。采用 STM32嵌入式系統作為充電樁控制器,STM32嵌入式系統是一種高性能、低功耗的芯片,具有豐富的接口資源和強大的計算能力,可以滿足充電樁控制器的需求[5]。同時,STM32嵌入式系統的開發工具和生態系統比較完善,可以降低開發難度和成本。選擇GPRS模塊作為通信方案需要考慮到移動網絡信號的覆蓋范圍和穩定性,同時還需要考慮到通信安全性和數據隱私保護[6]。在開發過程中,需要進行充分的測試和驗證,確保通信和控制的穩定性和可靠性。

圖1 系統基本結構示意圖
1.1 遠程監控系統組成
電動汽車充電樁遠程監控系統通常包括以下組成部分。
1)充電樁硬件。包括充電頭、計量裝置、控制器等,用于將交流電或直流電轉換為適合電動汽車電池充電的電能,并將電能輸送到電動汽車的電池中。
2)遠程監控平臺。用于實時監控和管理充電樁,包括充電樁的運行狀態、充電量、充電速度等信息,同時也可以進行遠程診斷和故障排除。
3)通信技術。用于將充電樁的信息傳輸到遠程監控平臺,通常采用無線通訊技術,如GPRS、3G、4G等[7]。
1.2 充電樁電量數據監控中心功能
電動汽車充電樁電量遠程數據監控中心是一個負責管理和監控電動汽車充電樁電量的中心系統,通常由監控軟件、服務器、數據庫等組成(圖2),主要功能如下[8]。
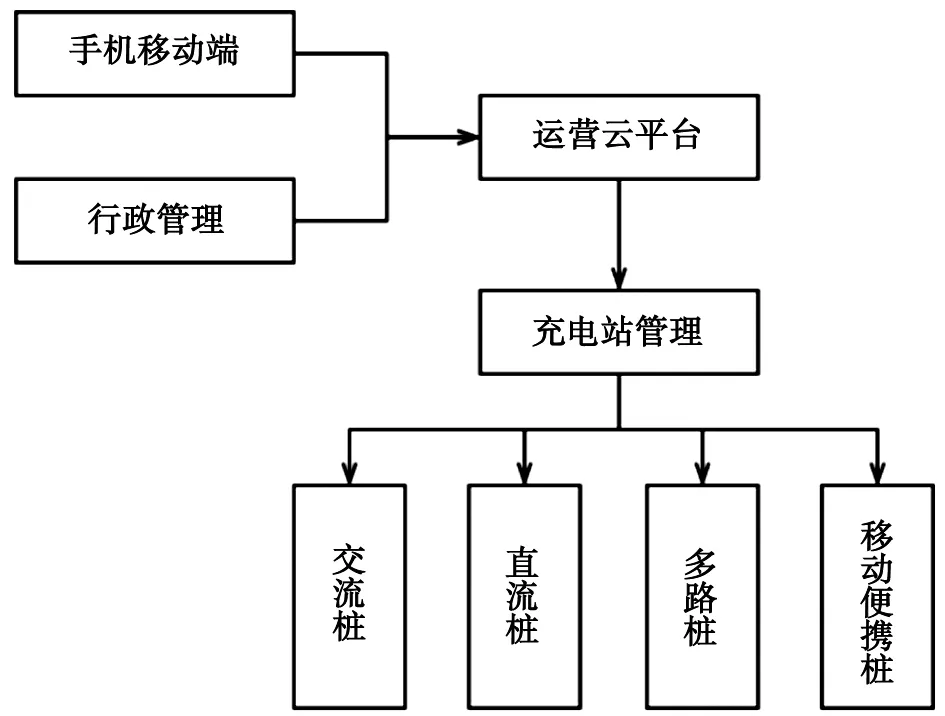
圖2 充電樁電量遠程監控系統整體結構示意圖
1)充電樁管理。對電動汽車充電樁進行管理和維護,包括充電樁的注冊、授權、故障處理、升級等操作。
2)充電樁監控。實時監控充電樁的運行狀態、充電情況、故障信息等,并對異常情況進行報警處理。
3)充電數據統計。收集充電樁的使用數據,包括充電電量、充電時間、充電費用等,并進行分析和統計。
4)用戶管理。管理用戶信息和充電記錄,支持用戶查詢和充值等操作。
5)數據分析。通過對充電數據的分析和挖掘,提供電動汽車的使用情況、充電樁的使用率等數據,幫助企業和政府進行決策和規劃。
為了實現對電動汽車充電樁的全面管理和監控,電動汽車充電樁數據監控中心通常需要與充電樁控制器進行數據通信,收集充電樁的實時運行數據和故障信息,并對這些數據進行分析和處理,從而實現對充電樁的智能化管理和優化。
1.3 監控中心服務器的設計
電動汽車充電樁數據監控中心服務器通常是一臺專門的服務器設備,可以連接到GPRS網絡或其他互聯網網絡,以便于充電樁控制器和用戶設備進行數據通信和管理[9]。該服務器可以通過云端平臺或其他方式提供數據存儲、數據分析和數據可視化等服務,從而實現對充電樁的遠程監控和管理。除了上述功能和組成部分外,還可以進一步擴展和完善,如可以支持其他通信協議,如4G、5G、Wi-Fi、LoRa、NB-IoT等,以滿足不同場景和需求下的數據傳輸和通信,并且可以支持多種支付方式,如刷卡、支付寶、微信等,以滿足用戶的支付需求和提高用戶的使用體驗。
2 充電樁系統硬軟件設計
2.1 控制器的設計
ARM Cortex-M3是一種常見的嵌入式處理器架構,STM32F103是一種使用該架構的微處理器,常用于開發嵌入式系統。本研究選擇使用STM32F103微處理器來實現電動充電樁遠程監控系統,作為主要的控制和計算單元,來實現遠程監控功能。ARM開發板的GPIO 配置如表1所示。

表1 ARM開發板的GPIO 配置
2.2 充電樁GPRS模塊硬件設計
GPRS通信是一種基于移動通信網絡的數據傳輸技術,通常用于無線數據傳輸和遠程控制等應用場景[9]。在電動汽車充電樁控制器與監控中心之間的通信中,本研究選擇采用GPRS通信技術。通過GPRS通信,充電樁控制器可以實時向監控中心傳輸充電數據、異常報警等信息,同時監控中心也可以通過GPRS網絡下發指令,控制充電樁的開啟、關閉、調節充電電流等操作。與傳統的有線通信相比,GPRS通信具有無線傳輸、覆蓋范圍廣、成本低等優勢,因此被廣泛應用于遠程監控、數據傳輸等領域。
本研究采用的 GPRS 通信模塊最終選取使用的是基于SIM800C芯片的模塊,SIM800C芯片是一款由SIMCOM公司推出的GSM/GPRS模塊芯片,主要用于支持移動通信、短信、數據傳輸和GPS等功能。該芯片支持全球四頻段GSM/GPRS網絡,提供了多種接口和協議,包括UART串口、USB、SPI、I2C、TCP/IP和HTTP等。此外,SIM800C芯片還支持語音和FAX數據傳輸功能,并且集成了GPS模塊,能夠支持GPS和GLONASS定位服務。
GPRS 模塊是由多個部分所共同組成的,這些模塊具備不同的功能,如閃存、射頻模塊等。SIM800C 的功能框圖如圖3所示。

圖3 GPRS 模塊的功能框圖
2.3 軟件開發環境
電動汽車充電樁電量遠程監控系統的軟件程序運行環境使用文本編輯器進行,編程語言使用Python,電動汽車充電樁遠程監控系統使用多種通信協議進行遠程監控和控制,連接云平臺進行遠程監控和控制,電動汽車充電樁電量遠程監控系統的軟件程序代碼如下:
#include
#include
#include
#include
#include
// 定義電動汽車充電樁結構體
typedef struct {
int id; // 充電樁ID
float power; // 充電樁電量
bool status; // 充電樁狀態(開/關)
time_t last_time; // 上次更新時間
} ChargingPile;
// 定義電動汽車充電樁數組
ChargingPile charging_piles[] = {
{1, 90.5, true, 0},
{2, 80.3, false, 0},
{3, 75.0, true, 0},
{4, 68.2, true, 0},
{5, 60.1, false, 0},
{6, 50.7, true, 0},
{7, 45.9, true, 0},
{8, 30.8, false, 0}
};
// 獲取當前時間
time_t get_current_time()
{
time_t current_time;
time(¤t_time);
return current_time;
}
// 獲取兩個時間之間的時間差(秒)
int get_time_diff(time_t start_time, time_t end_time)
{
return difftime(end_time, start_time);
}
// 更新充電樁電量和狀態
void update_charging_pile(int id, float power, bool status)
{
// 查找充電樁
for(int i = 0; i if(charging_piles[i].id == id) { // 更新充電樁電量和狀態 charging_piles[i].power = power; charging_piles[i].status = status; charging_piles[i].last_time = get_current_time(); printf("充電樁 %d 電量更新為 %.2f kWh,狀態為 %s
", id, power, status ? "開" : "關"); break; } } } // 模擬更新充電樁電量和狀態 void simulate_update_charging_pile() { // 隨機更新一個充電樁 int index = rand() % (sizeof(charging_piles) / sizeof(ChargingPile)); float power = (float)(rand() % 100) + 1; bool status = rand() % 2 == 0 ? true : false; update_charging_pile(charging_piles[index].id, power, status); } int main() { // 初始化隨機數種子 srand((unsigned)time(NULL)); // 模擬更新充電樁電量和狀態 for(int i = 0; i <10; i++) { simulate_update_charging_pile(); } // 循環更新充電樁電量和狀態 while(true) { // 模擬更新充電樁電量和狀態 simulate_update_charging_pile(); 本研究通過對電動汽車充電樁電量遠程監控系統的設計主要得出以下結論。 本研究選擇采用GPRS通信技術,充電樁控制器可以實時向監控中心傳輸充電數據、異常報警等信息,同時也可以下發指令,控制充電樁的開閉、調節充電電流等操作。 電動汽車充電樁電量遠程數據監控中心可以實現充電樁管理、充電樁監控、充電數據統計、用戶管理和數據分析等功能。3 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
