基于多傳感器信息的汽車低速車速估計方法*
2023-07-31 04:24:00浦震峰上官文斌王偉瑋蔣開洪
汽車工程 2023年7期
浦震峰,唐 亮,上官文斌,王偉瑋,蔣開洪
(1.北京林業大學工學院,北京 100083;2.華南理工大學機械與汽車工程學院,廣州 510621;3.寧波拓普集團股份有限公司,寧波 315800)
前言
隨著智能車輛技術的發展,車輛控制的精細化程度越來越高,高精度的車速信息是實現車輛運動控制的基礎。在自動泊車功能中,準確實時的輪速和車速信息可提高車輛位姿估算的準確性[1-2],實現精準地泊車和減少控制時的超調沖擊。然而,受限于泊車系統硬件電子元件的特性和執行機構的性能,泊車算法會限制最高車速。泊車最高車速一般為10 km/h。在泊車過程中,車速經常會低于5 km/h。由于車速過低,輪速傳感器發出的脈沖信號間隔時間增長,輪速信號的準確性和實時性大大下降,這會導致車輛位姿估算的精度下降。多普勒雷達、五輪儀等可直接精確測量車速,但是由于成本限制和結構布置等因素,此類設備無法應用于量產汽車。但是隨著低速場景下控制需求的增加,利用標準車載傳感器進行低速車速估算的需求也在日益增加。
目前車速估計的方法主要有兩種。一種是利用輪速傳感器信號和慣性測量單元(IMU)信號設計車速估計器,同時利用全球定位系統(GPS)的數據進行校正。但是常規GPS 精度低,傳感器信號受環境因素影響大,常出現信號丟失的情況,其可靠性難以滿足控制系統的需求[3-4]。Ding等[5]利用全球定位系統、慣性測量單元以及輪轂電機狀態信息,設計了面向四輪獨立驅動車輛的縱向車速估計算法。另一種是通過傳感器信息和建立的車輛動力學模型,設計狀態觀測器,估算車速。該方法的準確性與所建立的車輛動力學模型密切相關[6]。國內外諸多學者對輪速信號的噪聲以及車速估計做了廣泛的研究工作。在消除輪速信號的周期性噪聲方面,為解決齒圈的非理想等間距所產生的周期性噪聲,基于齒圈幾何模型和遞推約束最小二乘估計算法,Rallo 等[7]提出了一種在線濾波方法,試驗證明了該濾波算法不會消除系統本身的速度波動特征信息。對高速行駛時輪速傳感器的信噪比降低以及由輪速信號計算數據的發散性等問題,韓宗奇等[8]提出先將輪速信號在頻域中進行“濾波”,再通過傅里葉逆變換獲得時域下的真實信號。
在基于運動學和動力學的車速估計研究方面,陳浩等[9]利用1階擴張狀態觀測器,將車輛縱向動力學方程中的未知非線性部分作為擴張狀態進行估計,降低了模型精度對車速估計的影響。Karlsson等[10]以加速度計和陀螺儀測量值為輸入,提出了一種基于深度學習卷積神經網絡(CNN)的車速估算方法。高振海等[11]基于車輛動力學模型,提出了一種以底盤域傳感器信息為輸入、基于混合神經網絡架構的車速估計算法。Hashemi 等[12]基于卡爾曼濾波器,將LuGre 輪胎模型和車輛動力學相結合,提出了一種車輛縱向車速估計方法。在大加速度工況下,由于車輛模型和輪胎模型會具有很強的非線性,此時經典的卡爾曼濾波器將不再適用,文獻[13]~文獻[15]中將適用于非線性系統的擴展卡爾曼濾波器和無跡卡爾曼濾波器應用到車速估計中。為避免濾波發散,提高估計精度,周衛琪等[16-17]提出利用最小偏度單形采樣策略和遺傳算法改進無跡卡爾曼濾波器來減小噪聲干擾對車輛狀態估計精度的影響。
近年來,隨著分布式驅動電動汽車控制技術的發展,針對全輪驅動的分布式驅動電動汽車的縱向車速估計方法已經成為車輛動力學領域的熱點問題。高博麟等[18]利用分布式驅動電動汽車的優勢設計了基于聯邦卡爾曼濾波技術的多方法融合的車速估計方法。趙治國等[19]針對分布式驅動混合動力汽車,利用其后輪轂電機轉矩可測和前輪驅動轉矩可推算的特點,設計了對噪聲方差及均值具有自適應功能的無跡卡爾曼車速估計算法。余卓平等[20]融合運動學和動力學縱向車速估計方法,利用加速度傳感器信息和各車輪滑移率反饋值提出了一種縱向車速非線性自適應估計算法。
然而,針對車輛在極低速工況下的車速估計研究則相對較少。目前,用于確定車輪角速度的多是增量編碼器類型的傳感器[7],均是以脈沖數為基礎計算輪速。當輪速極低時,每單位時間的脈沖數較低甚至為零,除非檢測到脈沖,否則無法更新輪速信息。Pino等[21]采用增加霍爾傳感器的采樣時間以及使用特殊化后的卡爾曼濾波器方法,以減小在低速工況下輪速傳感器的量化噪聲。中高速工況下的車速估計研究主要是為解決當車輪滑移和側偏時,車速無法直接通過輪速進行簡單計算得到的問題,而低速工況下的車速估計研究主要解決低速工況下,輪速信號精度變低、更新周期變長等因素對車速估算的影響。
綜上所述,目前對車速估計算法的研究主要集中在輪速信號的噪聲處理以及中高速工況下的車速估算上,關于極低速工況下的車速估計研究較少。為提高低速下車速估算的實時性和準確性,本文針對電驅動汽車提出了一種基于多傳感器信息的低速車速估計方法:建立了基于自適應加權融合的輪速算法,提高輪速信息的更新頻率;利用電驅動汽車傳動系統簡單的特點,提出基于電機轉速信號的車速估計模型;通過交互多模型融合算法將基于輪速脈沖信號的估計車速和基于電機轉速的估計車速進行加權融合,提高車速估計的精度。
1 基于多傳感器信息融合的低速車速估計算法
1.1 算法框架
傳感器輸入的信號有:4個輪速傳感器提供4個車輪的輪速脈沖信號Ii,i∈{fl,fr,rl,rr},轉向盤角度傳感器提供轉向盤轉角信號δ,慣性測量單元提供車輛縱向加速度axIMU、側向加速度ayIMU和車輛橫擺角速度信號ωrIMU,驅動電機的旋轉變壓器提供驅動電機的轉速信號nf、nr。
基于測量的信號,建立兩個車速估算模型I(基于多輪速脈沖信號的車速估算模型)和模型II(基于電機轉速信號的車速估算模型)。
(1)模型I 的估算方法。首先根據轉向盤轉角δ判斷車輛處于直行或是轉彎工況。如果是直行工況,則根據各輪速脈沖信號的跳變時刻,將4 個車輪的輪速進行加權融合計算得到更新周期更短的輪速信息。如果是轉彎工況,則利用阿克曼轉向定理,通過輪速換算以縮短輪速信息的更新周期。最后,基于車輛運動學,利用縮短更新周期后的輪速信息和車輛橫擺角速度計算車輛質心處的縱向車速和側向車速。
(2)模型II 的估算方法。首先根據電機轉速信號nf、nr和轉向盤轉角信號δ,利用整車傳動模型計算輪速,再根據車輛運動學模型計算車輛質心處的縱向車速和側向車速。
(3)基于模型I 估算車速時,可有效地避免噪聲干擾,基于模型II估算車速時,求得的車速信息更新周期短、精度高。采用交互多模型融合估計算法(IMM)對兩個子模型的估計結果進行加權融合,將兩個模型的優勢融合到一個組合過濾器中,最終得到較為理想的車速估計結果。
1.2 基于多輪速脈沖信號的車速估算模型(模型I)
1.2.1 輪速計算
霍爾式輪速傳感器由齒圈和霍爾傳感器組成[19],霍爾傳感器固定在支架上,齒圈隨車輪一起轉動,在齒圈齒尖靠近或遠離霍爾傳感器的過程中,傳感器內的霍爾元件產生隨磁場強度變化的霍爾電壓,經電路處理后霍爾傳感器輸出頻率與輪速呈比例的脈沖信號。
工程中常用式(1)計算輪速V[k]:
式中:V[k]為第k個周期時計算的輪速;Nz為齒圈齒數;R0為輪胎有效滾動半徑;TN[k-1]為(k-1)周期的時間長度;N[k-1]為(k-1)周期時輪速傳感器脈沖信號的個數。
當車速較高時,TN[k-1]的取值為運行周期,固定不變。當車速較低時,單位運行周期TN[k-1]內所能檢測到的脈沖數較低或為零,此時由于無法檢測到新的脈沖,傳統輪速算法會自動切換至周期法,即通過計數器計算一個完整矩形脈沖所經過的時間,并將其賦值給TN[k-1]。這在一定程度上可以提高輪速的計算精度,但同時也會降低輪速的更新頻率,其最直觀的表現便是輪速曲線中出現非連續的階梯跳變。
1.2.2 自適應加權輪速算法
為解決單個輪速傳感器時輪速更新周期長的問題,本節在傳統輪速算法的基礎上,通過綜合整車4個輪速傳感器的輪速脈沖信息,建立自適應加權輪速計算模型。該模型主要面向自動泊車等車輛速度極低且沒有大強度的加速或減速的工況,即假設車輪的滑移率均很低可忽略不計。
算法的步驟如下。
(1)利用各輪速脈沖信號Ii,根據式(1)通過周期法計算各輪輪速Vwi。
(2)根據轉向盤轉角δ判斷汽車是轉彎還是直行工況。考慮到轉向盤的自由行程,設定當轉向盤轉角的絕對值小于10°時,車輛處于直行工況,否則,車輛處于轉彎工況。
(3)在直行工況下,根據輪速信號的脈沖更新時間,計算各輪速信號的權值(可信度),通過自適應加權融合得到更新頻率更高、實時性更好的輪速。各輪速信號的權值λi的計算公式為
由于直線行駛時四輪輪速相差很小,通過加權系數將4 個輪速傳感器的數據進行融合得到虛擬車速V1,即
式中:λi為各輪輪速信號的權重系數;Vwi為各輪按周期法求得的輪速。
(4)在轉彎工況下,根據阿克曼轉向原理,利用已知的轉向盤轉角δ、轉向總傳動比K、車輛軸距l和輪距S,計算車輛前外輪轉角δo和前內輪轉角δi。然后根據車輛前內外輪轉角和輪距,計算各個車輪的轉彎半徑,最后通過輪速映射,提高輪速信號的更新頻率。
前輪轉角的計算公式為
式中φ為前輪平均轉角,φ=δ/K。
各個車輪的轉彎半徑的計算公式為
式中下標fi、fo、ro、ri 分別表示前內輪、前外輪、后外輪及后內輪。
當車輛處于大角度轉向時,各個車輪間輪速相差較大,此時選取最小的車輪的輪速Vwi作為虛擬輪速,通過阿克曼轉向模型換算剩余車輪的輪速,即當車輛在低速工況下轉向時,4 個車輪的輪心繞轉向中心點所做圓周運動的角速度相等。因此,各輪輪速間的換算關系為
式中:a、b∈{fi、fo、ro、ri},其中不計算虛擬輪;Va為待求輪速;Vwb為虛擬輪速;Ra和Rb分別為轉向時待求輪和虛擬輪車輪的轉彎半徑,具體由式(5)求得。
最后,根據運動學模型,通過前輪平均轉角φ,前輪輪速Vfi、Vfo,車輛橫擺角速度ωr和車輛質心到前軸距離lf計算車輛質心處的縱向車速V1x和側向車速V1y:
1.3 基于電機轉速信號的車速估算模型(模型II)
目前大部分純電動汽車采用的是單級固定速比減速器的減速方案,整車傳動系統中取消了離合器或液力變矩器,這使得通過驅動電機的轉速信息進行輪速估計的方法變得更加方便。試驗車輛由兩個驅動電機分別驅動前后軸。驅動電機與車輪之間通過減速器和差速器傳遞動力。
當車輛直行時,前輪和后輪輪速為
式中:Vfj、Vrj分別為前輪和后輪輪速;nf、nr分別為前驅動電機和后驅動電機的轉速;i0f、i0r分別為前后減速器的減速比。在整車VCU 及電機控制器MCU 的控制下,根據前后電機轉速計算所得的前后輪速相差很小,因此可只采用前驅動電機的轉速信息進行車速計算。
當車輛轉彎時,由于差速器的作用,左右兩側車輪轉速ωil、ωir的平均值等于差速器的輸入軸轉速:
將四輪模型轉化為兩輪自行車模型后,虛擬前輪輪速Vf可由前差速器輸入軸轉速求得:
車輛質心處的縱向車速V2x和側向車速V2y分別為
1.4 基于交互多模型的融合車速估計
基于多輪速傳感器脈沖信號的車速估算模型可以有效地避免噪聲干擾,但在極低速的情況下,其更新周期變長,而基于電機轉速信號的車速估算模型更新周期短,精度高,但傳動系統中的齒隙以及電機低速時的轉速波動導致車速估計結果存在波動。為充分發揮兩個估算模型的優勢,本文采用交互多模型融合算法(IMM)對兩個車速計算模型的輸出結果進行加權融合。交互多模型算法是一種軟切換算法,能夠對每個子模型的加權因子(模型概率)進行實時調整,從而降低估計誤差。完整的算法循環包括輸入交互、數據濾波、模型概率更新和輸出交互4部分[22]。以縱向車速估計為例,在第k時刻,完整的計算步驟如下。
步驟1:輸入交互
將上一時刻(k-1 時刻)數據濾波步驟中模型I和模型II 的卡爾曼濾波器輸出的狀態估計值、誤差協方差Pi(k-1|k-1),通過模型混合概率μij(k-1|k-1)進行加權融合,并將其作為當前時刻步驟2 中卡爾曼濾波器的狀態初值和初始誤差協方差P0i(k-1|k-1),其中i,j為模型序列。本文因只采用了兩個模型,故取i,j=1,2。由模型i到模型j的混合概率μij(k-1|k-1)的計算公式為
式中:μi(k-1)為上一時刻在模型概率更新步驟中求得的各模型的模型概率為各模型的歸一化常數;p為馬爾科夫概率轉移矩陣,矩陣元素pij決定了輸入交互的作用程度,考慮系統的穩定性和準確性,最終,p取為
若為第一次循環(k=1),則模型概率μi(k-1)、狀態估計值和誤差協方差P0i(k-1|k-1)均取初值:
步驟2:數據濾波
利用卡爾曼濾波器分別對兩個車速估算模型進行數據濾波。
模型Ⅰ的卡爾曼濾波器:利用慣性測量單元的縱向加速度信號axIMU與由模型Ⅰ計算所得的縱向車速信號V1x通過卡爾曼濾波器進行濾波。考慮道路坡度對縱向加速度信號的影響,實際的車輛縱向加速度為
式中:g為重力加速度;i為道路坡度,實際行駛過程中坡度變化緩慢,可以認為道路坡度i對時間的導數為零。因此,可建立微分方程組:
將其離散化,得到:
式中Δt為程序運行周期。
將縱向車速vx和道路坡度i作為狀態變量,將式(17)轉化為狀態空間方程的形式:
式中:xk為狀態變量;zk為系統測量值;uk為系統輸入;wk為系統過程噪聲;vk為測量噪聲,它們是均值為零且相互獨立的高斯白噪聲,各自的協方差矩陣分別為Q、R;系統矩陣A、控制矩陣B和觀測矩陣H分別為
卡爾曼濾波器主要包含時間更新和測量更新兩個過程[19]。
模型Ⅱ的卡爾曼濾波器:將基于電機轉速信號的車速估算模型(模型Ⅱ)求得的縱向車速V2x作為卡爾曼濾波器的測量值zk;將axIMU作為卡爾曼濾波器的系統輸入uk;系統矩陣、控制矩陣和觀測矩陣均與模型Ⅰ中的對應矩陣相同。經時間更新和測量更新后得到模型II中縱向車速和道路坡度的最優狀態估計和誤差協方差P2(k|k)。
步驟3:模型概率更新
交互多模型算法最終是將步驟2 中兩個濾波器的狀態估計結果進行加權融合。利用極大似然函數Λi(k)計算每個模型的模型概率μi(k):
步驟4:輸出交互
側向車速也采用交互多模型融合估計方法,具體步驟和縱向車速估計相似,不同的是在數據濾波步驟中,采用一維卡爾曼濾波器將模型i得到的Viy、與加速度信號ayIMU進行融合濾波。設置濾波器的狀態變量為vy,系統輸入為ayIMU,觀測值為Viy。系統矩陣A和觀測矩陣H均設為1,控制矩陣B的取值設為Δt。經交互多模型融合估計后得到側向車速的估計結果VyIMM。最終估計得到的車輛合速度VIMM為
2 車速估計算法的驗證
2.1 試驗場地及試驗設備
為檢測所提出算法的實時性與有效性,本文進行了實車試驗。在不同路面上進行低速直行和低速轉彎以驗證算法的可靠性,試驗場景如圖1 所示,其中測試路面包括平坦路面、鵝卵石路面和坡度為18%的坡道。
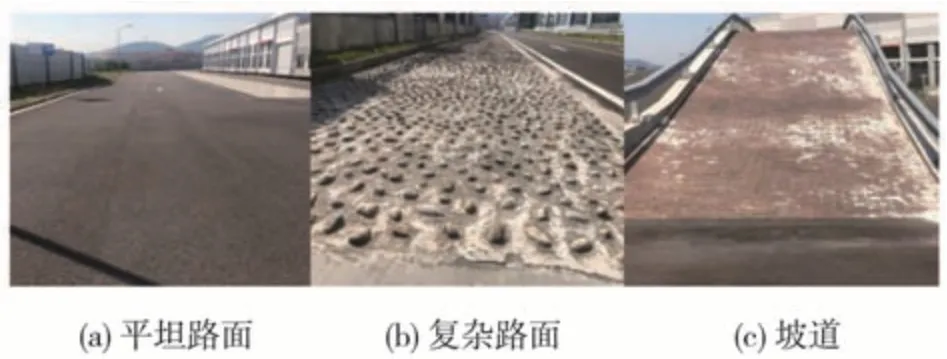
圖1 實車試驗場景
實車試驗平臺如圖2 所示,試驗采用一輛雙電機四驅SUV 作為試驗車輛,該車配備有基礎的底盤域傳感器,即包括輪速傳感器、慣性測量單元、轉向盤角度傳感器、擋位傳感器等。其中慣性單元固定在靠近車輛質心,用于測量車輛縱向加速度、側向加速度以及橫擺角速度。同時,該車還裝備有VBox數據采集系統(非接觸式汽車測試儀),其可通過高精度GPS 信號精確地測量車輛的實際速度,用于驗證車速估計算法的準確性。慣性測量單元信號和4 個輪速傳感器信號通過線束與控制器連接,電機轉速信號和轉向盤角度信號通過整車CAN 網絡輸出給控制器和數據采集系統。同時,控制器輸出的車速估計結果也可通過CAN 網絡輸出,最后利用數據采集系統和計算機采集并記錄試驗數據。試驗車輛詳細參數如表1所示。
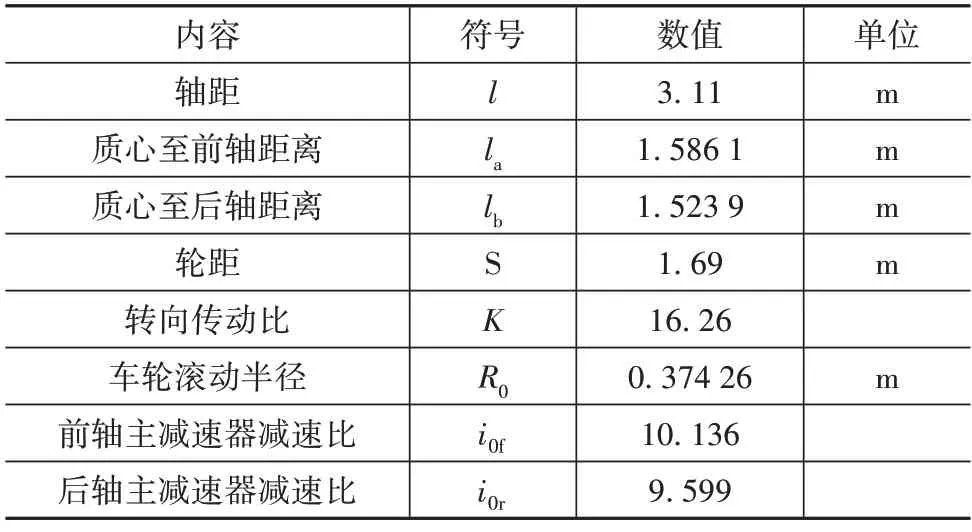
表1 車輛結構參數
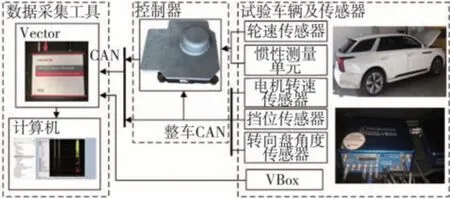
圖2 實車試驗平臺
2.2 試驗結果
在典型的低速行駛工況下,對所提出的低速車速估計算法進行驗證。將VBox所測得的車輛合速度作為用來參考的實際車速,并將傳統ESP算法輸出的車速估計結果和本文所提出的基于多傳感器信息融合的低速車速估計算法輸出的車速估計結果進行對比。試驗工況包括在平坦路面下的低速直行和低速轉彎工況以及在復雜路面和坡道上的低速直行工況。
本文中用于對比的ESP算法采用了一種基于傳感器信號融合的級聯觀測器系統進行車速估計[23]。該車速觀測器系統由底層、中層和上層組成。底層為低通濾波器,用于濾去傳感器的部分噪聲,得到轉向盤轉角、車輪輪速、縱向和側向加速度以及制動管路壓力等信號;中間層基于濾波后的傳感器信號估算道路坡度、制動力矩并根據上層估計得到的縱向和側向車速估算車輪滑移率和側滑角;上層則進行路面附著系數估計、輪胎力估計、通過車輛動力學估算車輛的縱向、側向加速度,通過縱向車速估計器和側向車速估計器融合輪速及加速度傳感器信號得到縱向和側向車速,并最終獲得車輛的合速度。
2.2.1 平坦路面下的試驗結果
在平坦路面下低速直行試驗中,車輛由靜止起步。試驗結果如圖3 所示。由圖可見:當車輛剛開始起步時,由于采用的是周期法計算輪速,ESP 算法輸出的車速曲線呈現出明顯的階梯狀;而本文中提出的車速估計算法融合了更新周期更短的電機轉速信息,在車輛起步階段可以得到更加準確實時的車速估計結果。
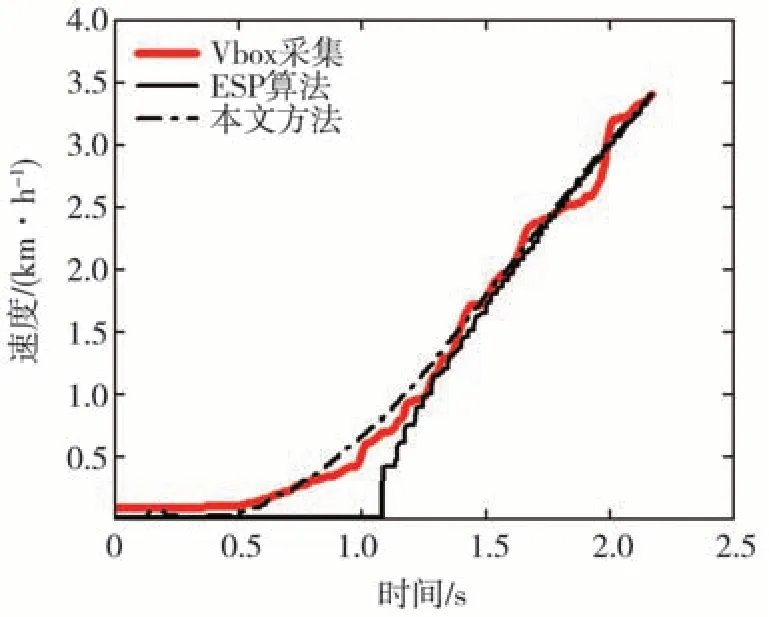
圖3 平坦路面下低速直行試驗結果
在平坦路面下低速轉彎試驗中,車輛由靜止起步,駕駛員施加的轉向盤轉角曲線如圖4 所示,向左轉向時轉向盤轉角為負,向右轉向時轉向盤轉角為正。速度曲線如圖5 所示。在8 s 左右時車輛開始減速,此時由于檢測不到新的輪速脈沖,傳統ESP算法的車速曲線會出現短暫的延遲,而本文提出的算法的車速曲線能夠快速地跟蹤實際車速的變化。但是,在4 和9 s 左右,當轉向盤轉角最大時,估算的車速與實際車速間出現較大的誤差。這是由于實際車輛轉向系統的非線性特性,即實際的轉向總傳動比K并非恒定值,由轉向盤轉角計算前輪轉角時出現誤差,導致車速估算結果出現偏差。
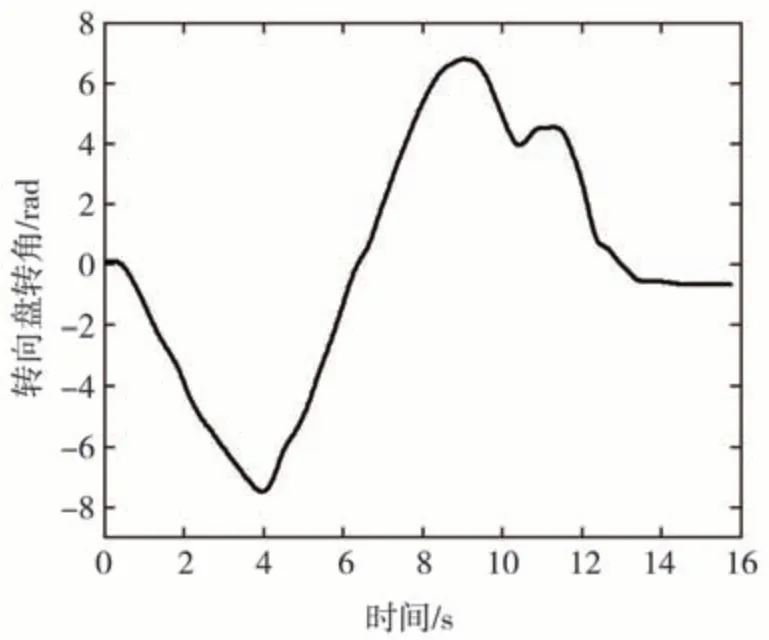
圖4 轉向盤轉角曲線
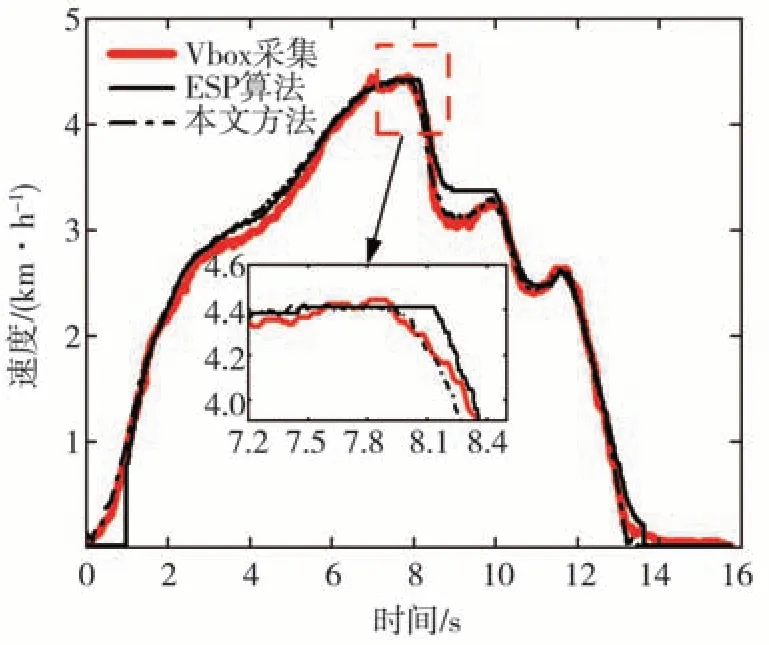
圖5 平坦路面下低速轉彎試驗結果
2.2.2 復雜路面下的試驗結果
在復雜路面下的低速直行工況試驗中,選用鵝卵石路面作為復雜路面,試驗結果如圖6 所示。同其他試驗工況類似,起步時,ESP 輸出的車速曲線存在較大的延遲,并且由于路面顛簸,車速曲線出現較大波動。得益于卡爾曼濾波器的濾波作用,本文提出的算法的車速曲線波動較小,輸出的車速曲線相對更加平穩。但是由于并未考慮車輛在顛簸路面上的俯仰和側傾運動對加速度信號的影響,故本文方法估算出的車速與實際車速之間仍有一定的偏差。

圖6 復雜路面下低速直行
2.2.3 坡道上的試驗結果
當車輛處于坡道上時,受重力影響,慣性單元所測得的加速度與車輛的實際加速度之間存在偏差,因此,獲得道路的坡道對進行車速估計具有重要的作用。道路坡度的估算結果如圖7 所示,車速的估計結果如圖8所示。
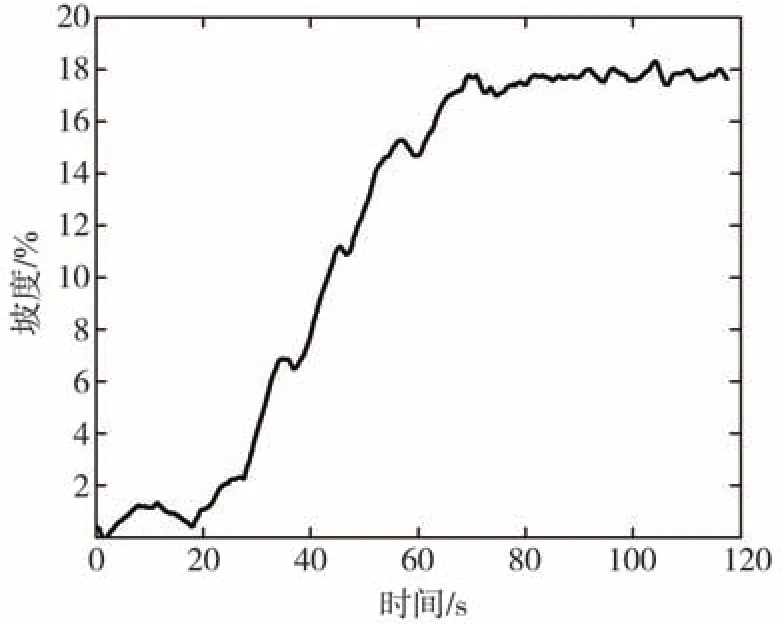
圖7 坡度估計結果
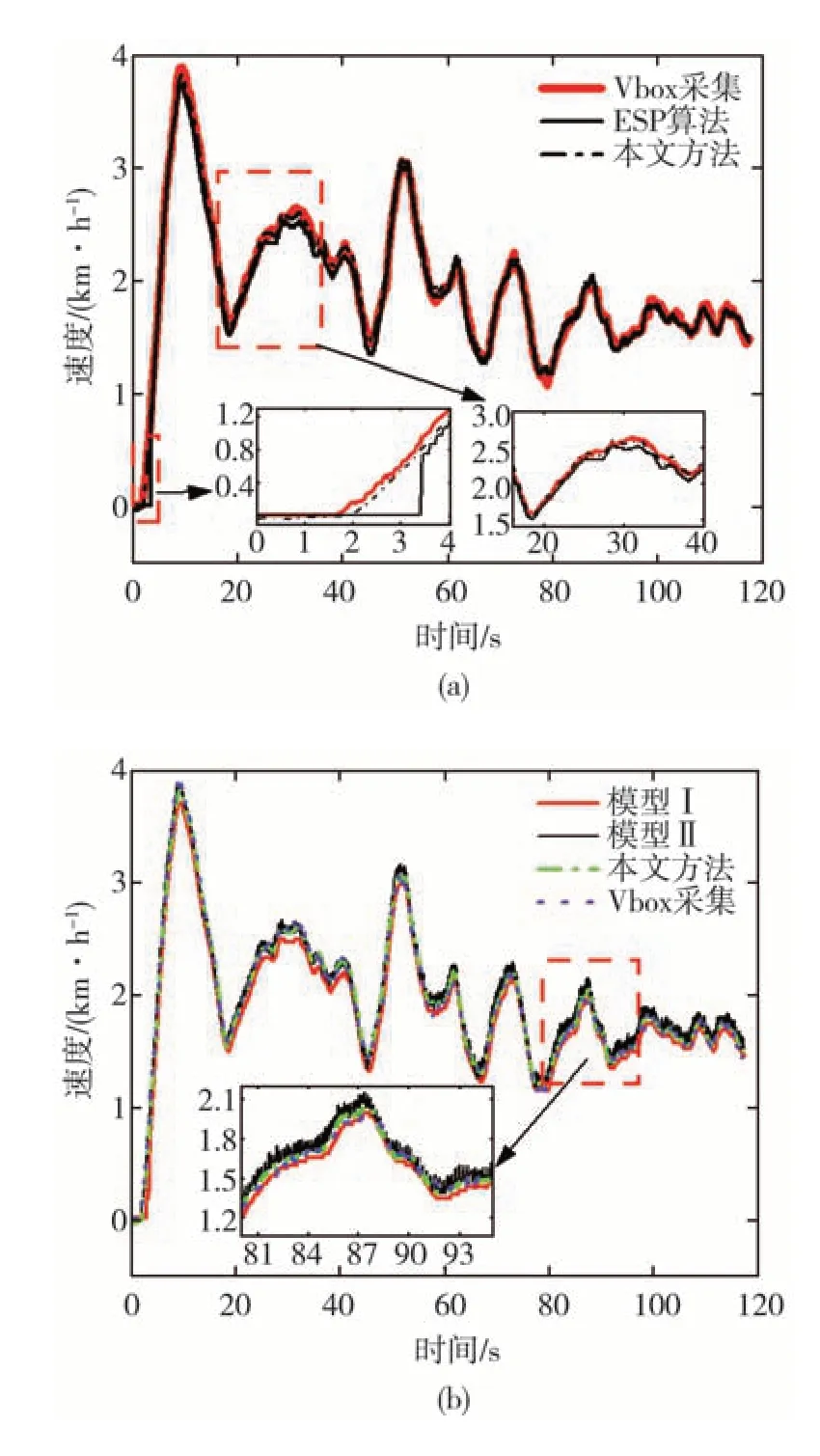
圖8 坡道上低速直行試驗結果
如圖8(a)所示,當車速達到0.7 km/h 時,ESP 算法輸出的車速曲線才會出現變化,而本文提出的算法可以實時更新車速變化,其所能檢測到的最低車速遠小于0.7 km/h。圖8(b)為模型I、模型II以及本文利用融合算法將兩個模型加權融合最終輸出的車速結果對比。低速工況下,由于驅動電機轉速信號的波動,模型II 輸出的車速估計曲線也呈現出一定的波動。基于輪速脈沖信號的模型I 的車速估計結果則不存在這種波動噪聲,但是其更新周期長,存在階梯形的量化噪聲。本文提出的車速估計算法將兩個模型的估計結果加權融合,在縮短車速更新周期的同時減小了電機轉速信號的波動噪聲對車速估計的影響,最終得到更加精準的車速估計結果。由于當車輛處于坡道上時,難以使車輛保持在相對恒定的低速狀態,故車速曲線波動較大,同時加速度信號受車輛俯仰的影響也變大,導致坡度估算出現一定的偏差,車速估算結果也受到一定的影響。
為了將本文提出的算法和傳統ESP 算法的估計精度進行定量比較,分別計算兩種算法所輸出的車速結果相對于VBox 測量值的平均絕對誤差(MAE)?:
式中:yi為由VBox 所得的測量值為算法輸出的估計值;n為在一次實車測試中數據采樣點的個數。表2 列出了在不同測試場景下,傳統ESP 算法和本文提出的算法所輸出車速信息的MAE指標。
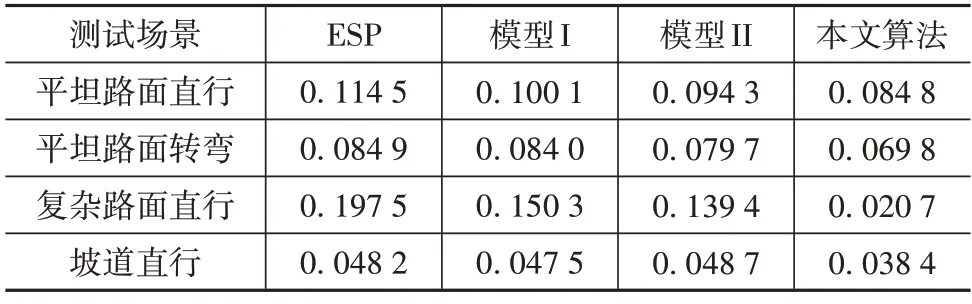
表2 ESP和本文算法所輸出車速信息的MAE指標
由表2 可以看出,采用融合算法后的估計結果比單一方法的估計結果精度更高,并且本文提出的算法的車速估計結果在各種不同測試場景下的MAE 指標均比傳統ESP 算法有所提升,這表明該算法在典型的低速場景下可以得到更加精確穩定的車速估計結果。
3 結論
針對電驅動汽車,本文以低速工況下的車速估計方法為研究對象,利用輪速傳感器脈沖信號和電機轉速信號建立了兩個車速子估計器模型,通過交互多模型融合算法充分發揮兩個子估計器模型各自的優勢。通過實車試驗得出以下結論:
(1)引入驅動電機的轉速信號進行車速估算可以降低低速工況下由輪速傳感器的增量式傳感器特性所產生的階梯形量化噪聲,并且可以大大降低車輛起步時為等待輪速脈沖所產生的車速更新延遲。
(2)針對驅動電機的轉速信號在低速工況下出現波動對車速估計產生影響的問題,將基于多輪速脈沖信號的車速估算模型與基于電機轉速信號的車速估算模型的計算結果進行加權融合,由此減小電機轉速信號波動和輪速脈沖信號更新周期長對車速估計精度的影響,從而實現更加精確實時的低速車速估計。
對于通過離合器或液力變矩器進行切斷和傳遞動力的傳統集中動力式車輛,當車輛處于低速時,離合器或液力變矩器常處于未完全接合狀態,此時無法準確地通過動力源(發動機)轉速估算輪速,本文中模型II 的估計精度將會因此下降,導致最終融合估計結果的精度降低。后續將討論采用無級變速系統(CVT)的車輛在低速工況下的車速估計方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
