四驅動電動汽車坡道行駛ASR控制仿真研究
2023-07-29 00:30:40唐陽山劉晶晶
計算機仿真 2023年6期
關鍵詞:模型
唐陽山,劉晶晶,劉 暢,王 琪
(遼寧工業大學,遼寧 錦州 121001)
1 引言
近年來,電動汽車在快速發展的同時還存在著續駛里程短、行駛安全性差的問題。在電動車輛諸多驅動結構中,以輪轂或輪邊驅動為核心的驅動方式在增強車輛安全性、操縱穩定性和提升整車能效等方面具備獨特的優勢[1]。輪轂電機驅動的電動汽車可以通過輪轂電機輸入的電壓或電流來控制驅動扭矩,大大縮短了控制時間且控制精度提高,降低了危險工況發生的可能[2]。驅動防滑系統(簡稱ASR)能夠在車輪發生滑轉時,實時調整電機的輸出扭矩,使汽車的加速過程快速而穩定[3]。四輪輪轂電機電動汽車驅動防滑控制主要包括三方面:1)車速估計。驅動防滑控制主要原理是控制驅動輪滑轉率,計算滑轉率時汽車縱向速度為主要值,縱向車速估計的準確性十分必要。2)路面識別。車輪在不同附著條件路面產生的滑轉率也不同,兩者的精確識別對驅動防滑控制效果影響很大。3)驅動防滑控制策略。根據獲得的實際滑轉率,實時控制輪轂電機的輸出轉矩來達到控制車輪不打滑的目的。
本文針對平路和坡路行駛的四輪輪轂電機電動汽車ASR控制,首先基于CarSim和MATLAB/Simulink搭建整車模型,然后分別進行縱向車速估計、路面識別和驅動防滑控制。其中,在估計縱向車速時,考慮到路面坡度的影響,采用縱向動力學和運動學融合估計的方法將車速與坡度進行聯合估計;建立模糊路面識別器進行路面峰值附著系數和最優滑轉率識別;采用積分分離型PID控制算法進行驅動防滑控制。
2 四輪驅動輪轂電機電動汽車建模
2.1 CarSim和MATLAB/Simulink整車模型搭建
采用CarSim和MATLAB/Simulink搭建整車模型,采用一個PID控制器來模擬駕駛員對車輛的加減速操作[4]。輪轂電機電動汽車整車模型如圖1。
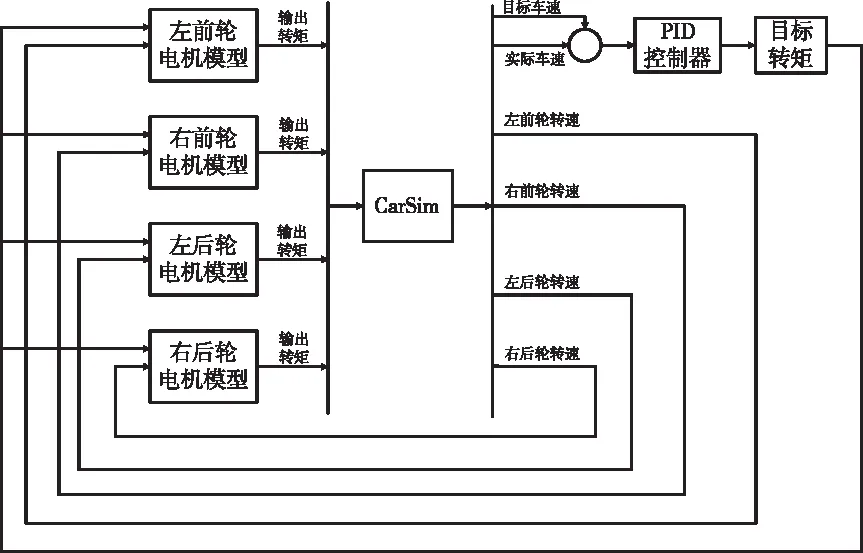
圖1 輪轂電機電動汽車整車模型
輪轂電機電動汽車所需動力是將CarSim傳統燃油汽車的動力傳動系統全部改為外部輸入,輸入由Simulink搭建的輪轂電機模型產生的驅動力矩。模型所需參數見表1。

表1 輪轂電機電動汽車模型參數
在Simulink中搭建輪轂電機模型,考慮電機結構、功率、可控性等特點選擇無刷直流電機。理想的電機模型需要簡化:不計電樞反應、渦流損耗和磁滯損耗;氣隙磁場分布為梯形波;忽略電機鐵芯飽和;驅動系統逆變電路的功率管和續流二級管均具有理想的開關特性[3]。輪轂電機相電壓方程為
(1)
Pe=eAiA+eBiB+eCiC=TeΩ
(2)
(3)
(4)
式中,uA、uB、uC—A相、B相、C相繞組電壓;eA、eB、eC—A相、B相、C相反電勢;Te、Tl—電磁轉矩、負載轉矩;J—轉子轉動慣量;Ω—電機機械角速度;Bv—黏滯摩擦系數;L—相繞組自感;M—相繞組互感。
2.2 整車模型驗證
在CarSim中設置路面附著系數為0.8的雙移線工況,將搭建的輪轂電機電動汽車整車模型和CarSim傳統車進行側向位移和橫擺角加速度仿真對比分析,如圖2和圖3。
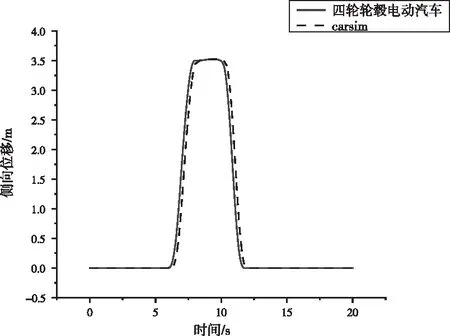
圖2 側向位移對比
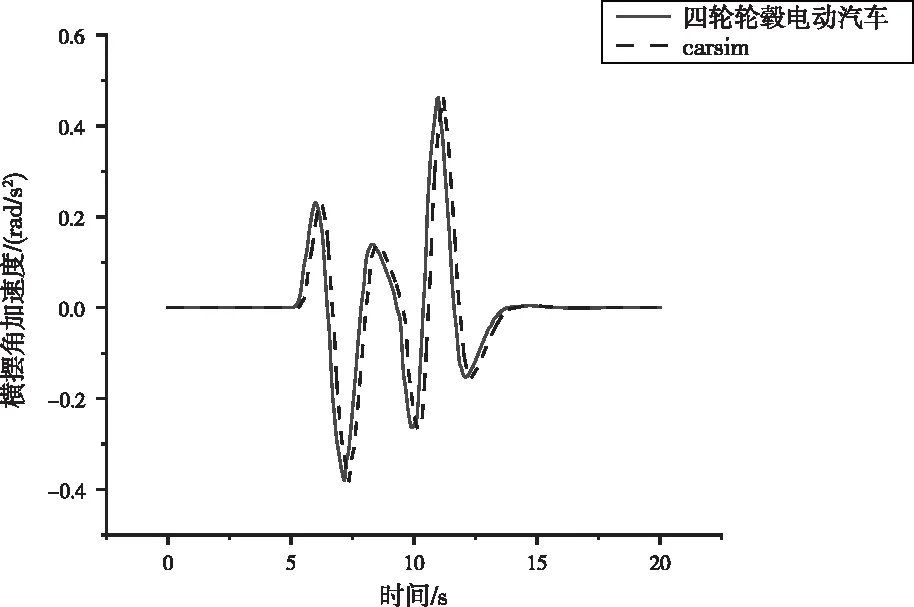
圖3 橫擺角加速度對比
由仿真結果可以看出搭建的四輪輪轂電動汽車與CarSim標準車差別很小,證明搭建的整車模型可用于后面控制算法的仿真驗證。
3 車速與坡度聯合估計
汽車車速和道路坡度信息是電動汽車動力性控制的關鍵參數。本文考慮在汽車不打滑不失穩的情況下,依據非線性縱向動力學方程和運動學方程,采用UKF估計方法對四輪獨立驅動電動汽車行駛時的縱向車速和縱向坡度進行聯合估計,由CarSim和MATLAB/Simulink聯合仿真驗證算法。
3.1 縱向動力學模型和運動學模型
四輪輪轂電機電動汽車行駛時縱向動力學模型為
(5)
由于各輪驅動力矩可通過安裝在每個驅動輪上的輪轂電機直接獲得,本文選擇利用車輪轉動方程來計算驅動力[6],整車驅動力可由四個驅動輪驅動力之和得到。考慮到汽車在有坡度路面行駛載荷轉移的情況,單個驅動輪驅動力計算公式為

(6)
各驅動輪的垂向力的計算公式為
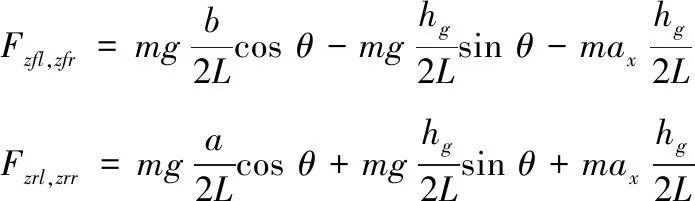
(7)
縱向加速度傳感器通常安裝于車身,由模擬的電壓信號幅值表征測量值[7]。汽車加速時縱向加速度傳感器值受車輛本身縱向加速度和當前道路坡度影響。關系式為

(8)
式中,asenx—縱向加速度傳感器測量值。
3.2 基于UKF的車速與坡度聯合估計
(9)
量測方程為
(10)
根據運動學模型的狀態方程和量測方程分別為

(11)
和
(12)
車輛在行駛過程中,基于動力學模型的路面坡度估計精度通常受高頻噪聲影響較大,而基于運動學模型估計的坡度受加速度傳感器靜態偏差影響較大,屬于低頻噪聲[9],因此可采用式(13)來實現最終坡度估計
(13)
式中,τ—時間常數;θ1—根據動力學模型估計的坡度值;θ2—根據運動學方程估計的坡度值。
3.3 仿真驗證
在CarSim設置仿真工況:設置兩條道路,分別為從平直道路行駛到上坡道路和坡度連續變化道路。車輛均從0開始起步,路面附著系數為0.8,方向盤始終保持不動,仿真結果見圖4、圖5、圖6和圖7。

圖4 上坡路面縱向車速

圖5 上坡路面縱向坡度
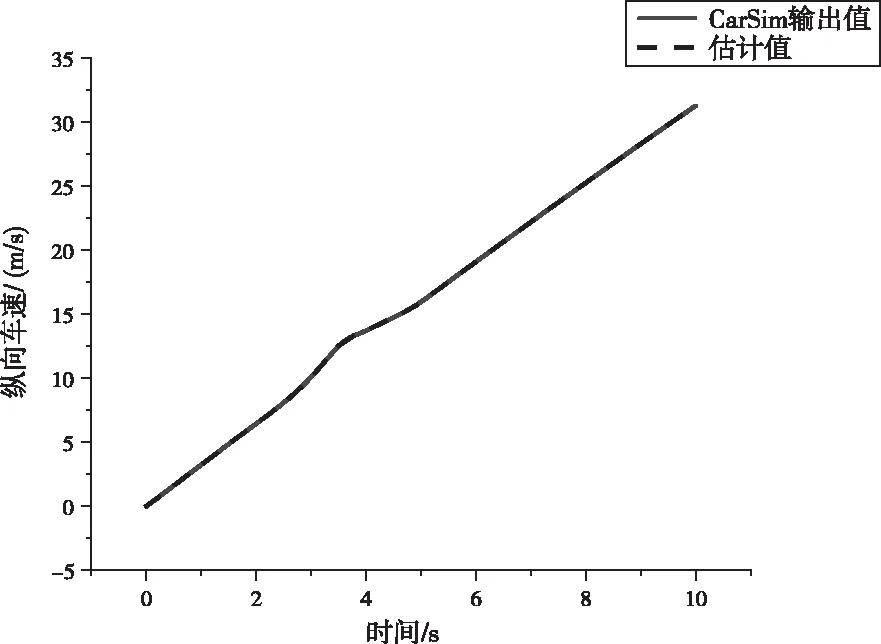
圖6 連續坡度路面縱向車速
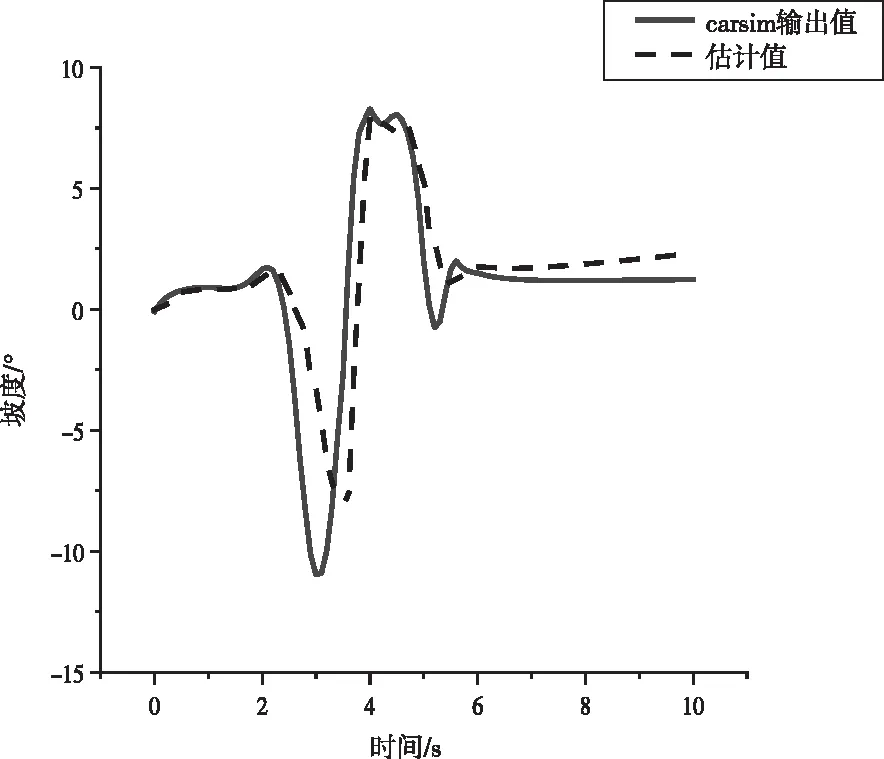
圖7 連續坡度路面縱向坡度
由仿真結果可以看出聯合估計效果很好,縱向車速和縱向坡度都能很好的跟蹤,坡度估計的誤差穩定在一個較小的范圍內。
4 路面識別
4.1 標準曲線
Burckhardt輪胎模型[10]擬合公式為
μ(s)=C1(1-e-C2s)-C3s
(14)
式中,C1、C2、C3—擬合系數。
令式(14)的導數等于0,可求得路面的最優滑轉率及峰值附著系數為
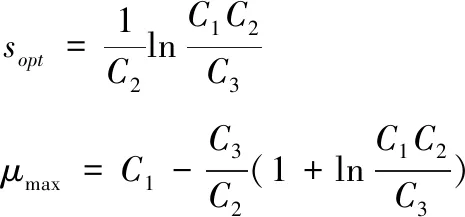
(15)
選取了冰、雪、濕鵝卵石、高、中、低濕瀝青等8條路面,各路面參數見表2。
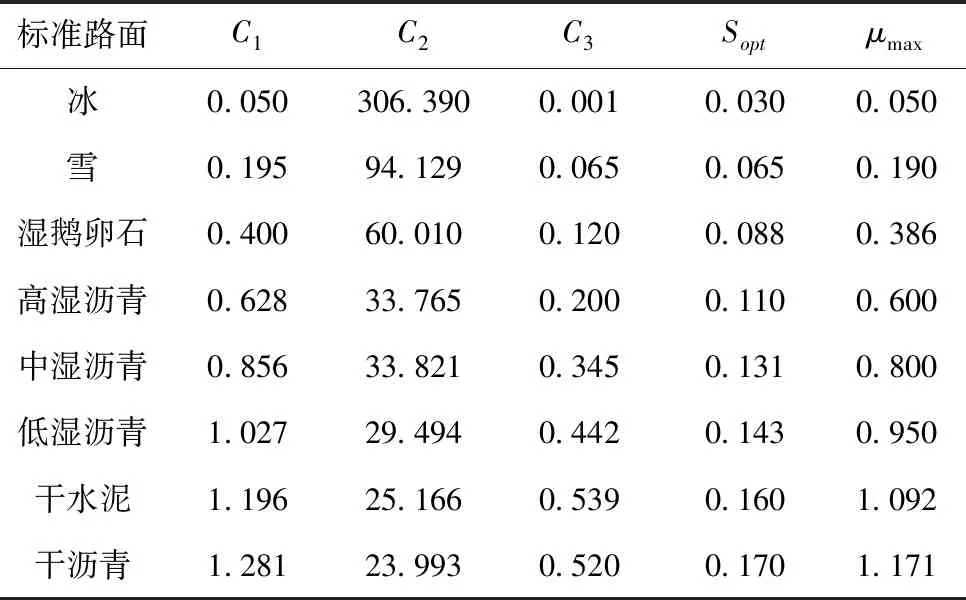
表2 標準路面參數表
8條標準路面滑轉率-附著系數曲線如圖8。
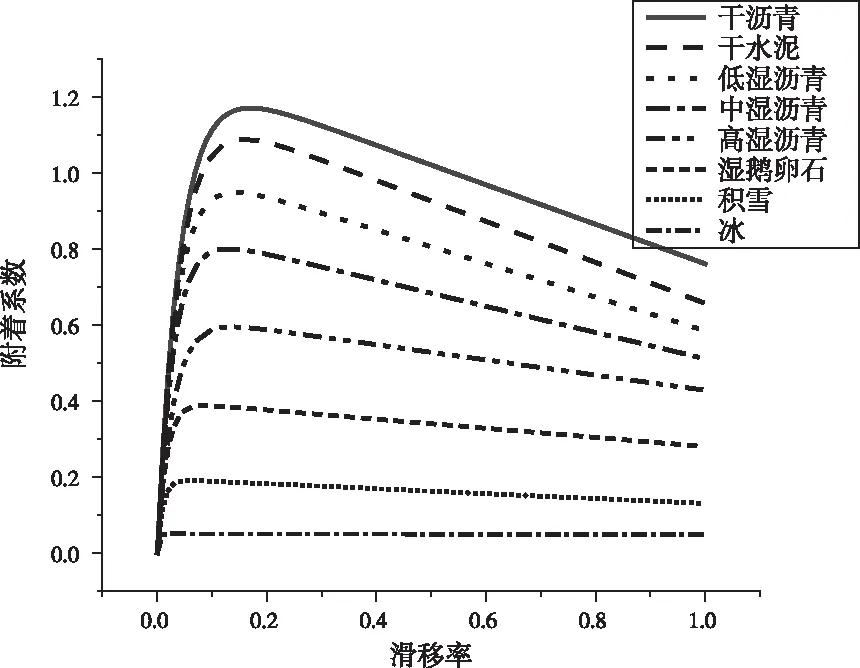
圖8 標準路面曲線圖
4.2 模糊路面識別器設計
模糊路面識別器輸入分別為驅動輪滑轉率和路面附著系數,輸出量為8個相似度系數。在MATLAB中設置模糊路面識別器,對實際滑轉率和路面附著系數進行模糊化,分為三個模糊子集,分別為小滑轉率[0,0.05],中滑轉率[0.05,0.15]和大滑轉率[0.15,1];路面附著系數分為8個模糊子集。兩輸入模糊隸屬度函數如圖9、圖10。
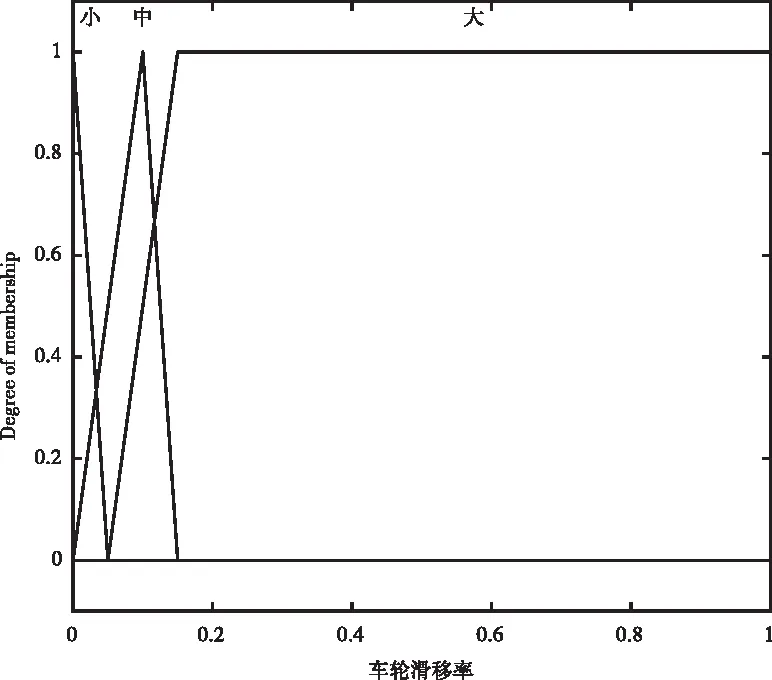
圖9 車輪滑轉率隸屬度函數
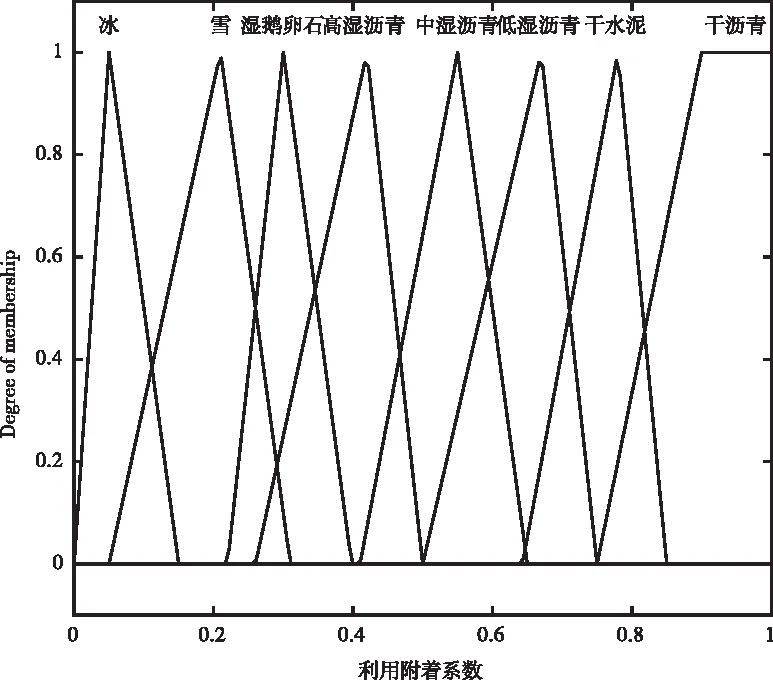
圖10 附著系數隸屬度函數
模糊推理規則的設定依據專家經驗法,分別用十分不相似(TD)、不相似(D)、一般相似(RS)、相似(S)、很相似(ES)五個模糊狀態語言表述,模糊規則表見圖11。
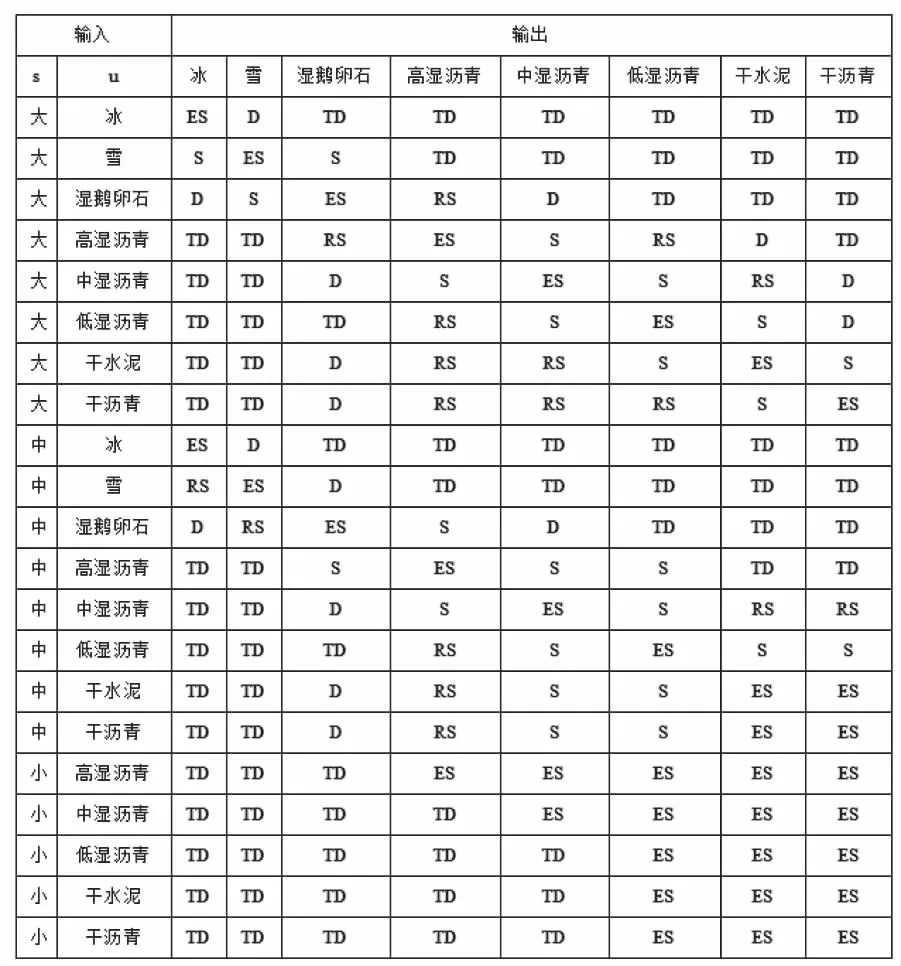
圖11 模糊規則表
解模糊規則如圖12。
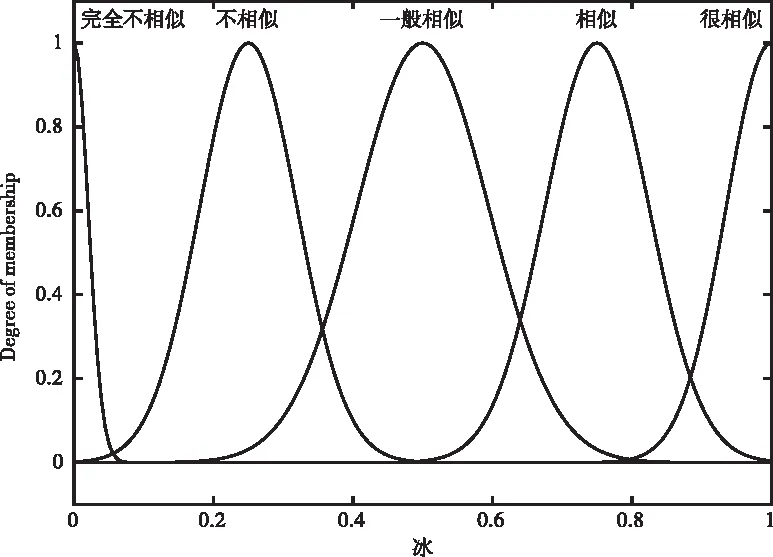
圖12 相似度隸屬度函數
由模糊路面識別器得到的相似度系數通過式(16)和式(17)計算后得到當前路面的sopt(最優滑轉率)和μmax(峰值附著系數)。
(16)
(17)
4.3 路面識別仿真驗證
1)單一低附上坡路面
在CarSim中設置一條路面附著系數為0.2的道路,車輛從平直道路開始起步加速,3s后爬坡,方向盤始終保持不動,仿真結果見圖13、圖14。
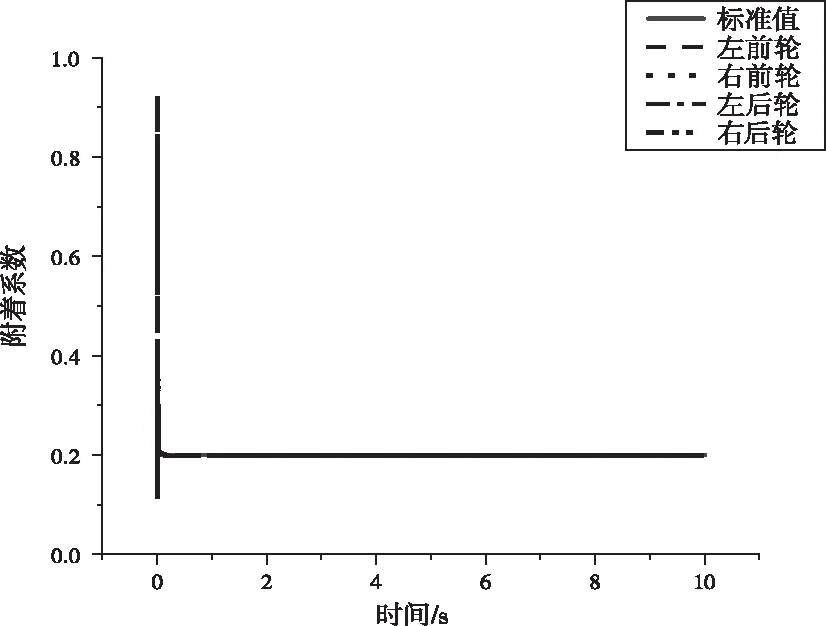
圖13 u=0.2上坡路面峰值附著系數
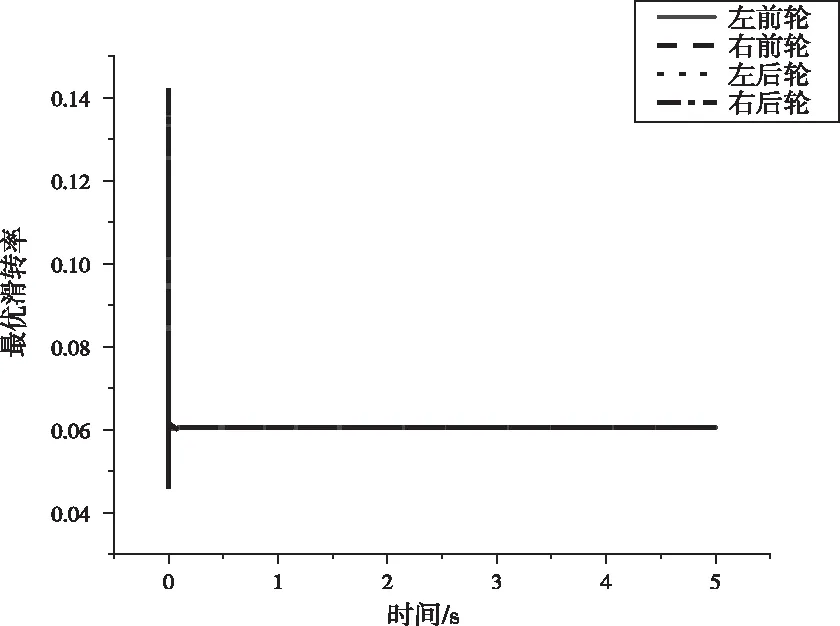
圖14 u=0.2上坡路面最優滑轉率
2)對接路面
對接路面設置:-100m到30m附著系數為0.8,30m之后為0.25,車輛從0m位置處起步加速駛入低附著路面,方向盤始終保持不動,仿真結果見圖15、圖16。
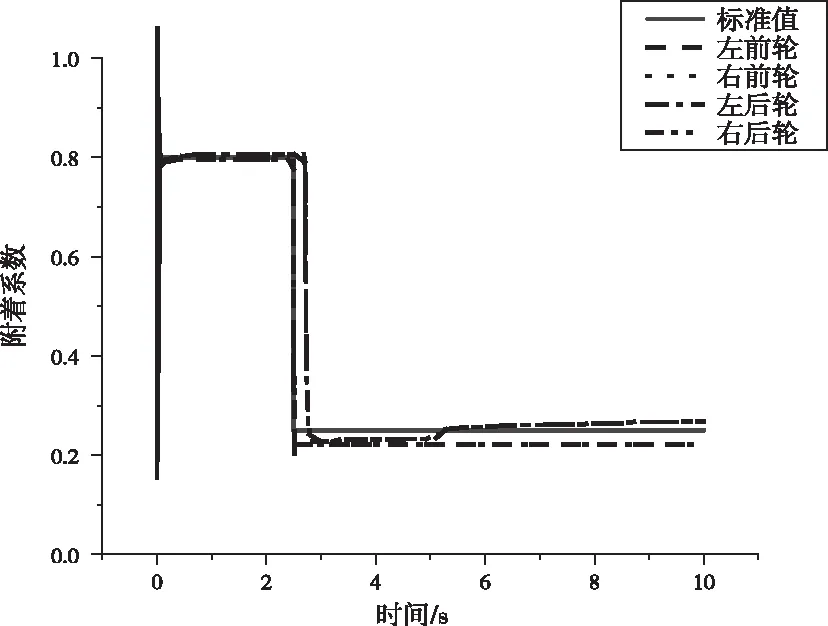
圖15 對接路面峰值附著系數
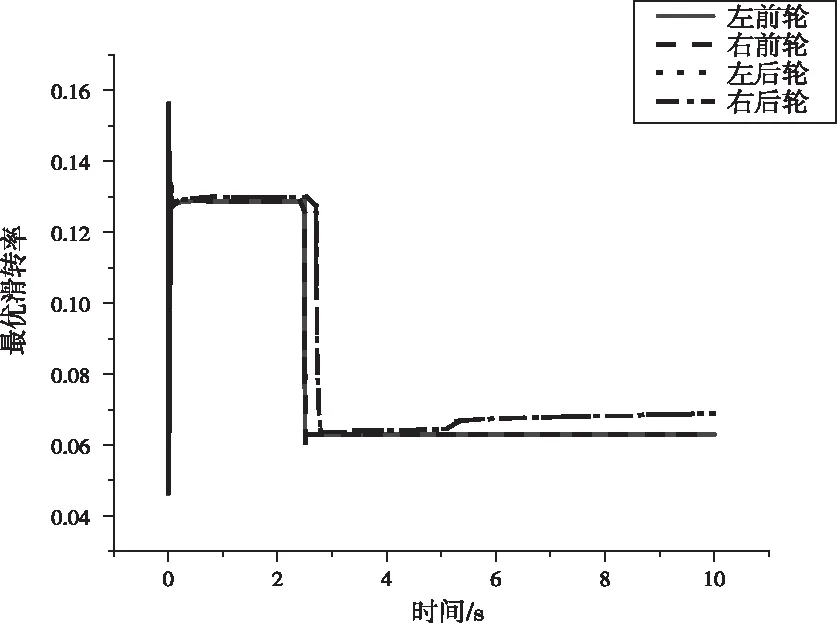
圖16 對接路面最優滑轉率
仿真結果表明所設計的模糊路面識別器能夠得到較準確的結果,對于均一低附著上坡路面偏差幾乎為0,對于對接路面,偏差在0.03以內,在可接受范圍。
5 驅動防滑控制
5.1 驅動防滑控制算法分析
以滑轉率為控制目標的驅動防滑控制整體架構如圖17。
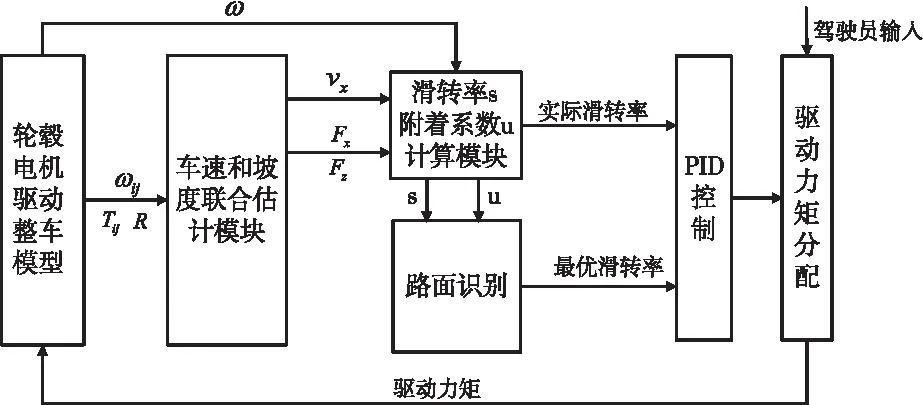
圖17 驅動防滑整體架構圖
PID控制主要是通過調節P、I、D的值來實現滑轉率控制。當實際滑轉率與最優滑轉率相差很大時,會引起過大的系統超調,甚至引起系統的振蕩。積分分離型PID控制算法既能保持積分作用,又能減少超調量[10]。其控制方法為:選定一個閾值μ,當輸入偏差e超過μ時采用PD控制,否則采用PID控制。在Simulink中搭建PID控制模塊如圖18。

圖18 PID控制模塊圖
經過PID控制后輸出ASR力矩,將此力矩與駕駛員輸入的目標力矩進行驅動力矩分配。車輛在駛入對開路面時,對兩側車輪單獨進行控制會發生側滑現象,由于本文只研究車輛縱向直行工況,因此在驅動力分配模塊選擇低選控制原則。
5.2 驅動防滑控制仿真分析
1)在CarSim中設置一條均一低附直行道路,路面附著系數為0.25,車輛以0m/s起步加速行駛,仿真結果如圖19、圖20、圖21、圖22。
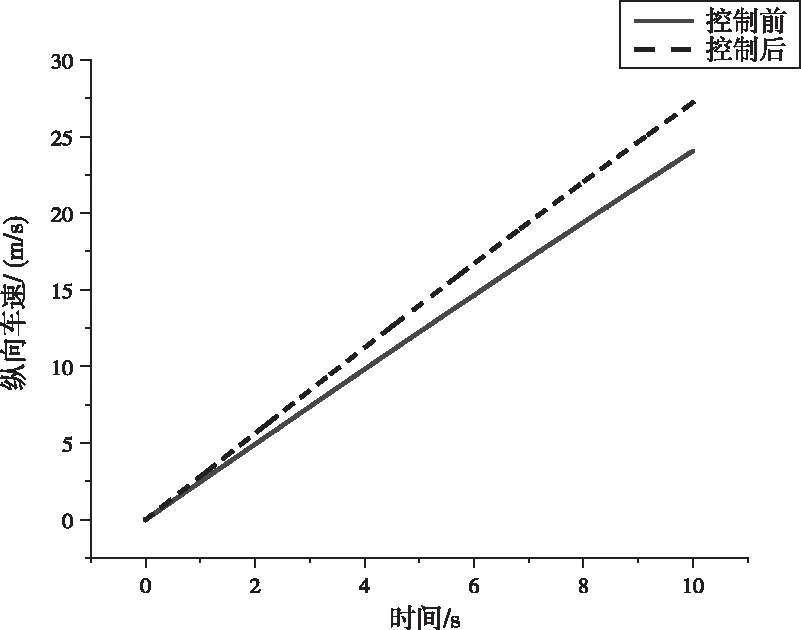
圖19 均一低附直行縱向車速
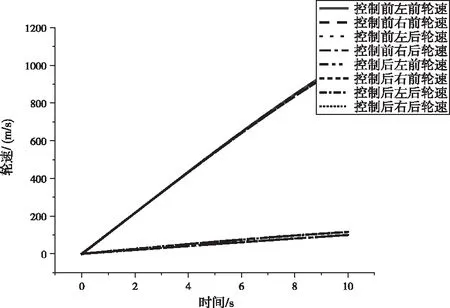
圖20 均一低附直行輪速
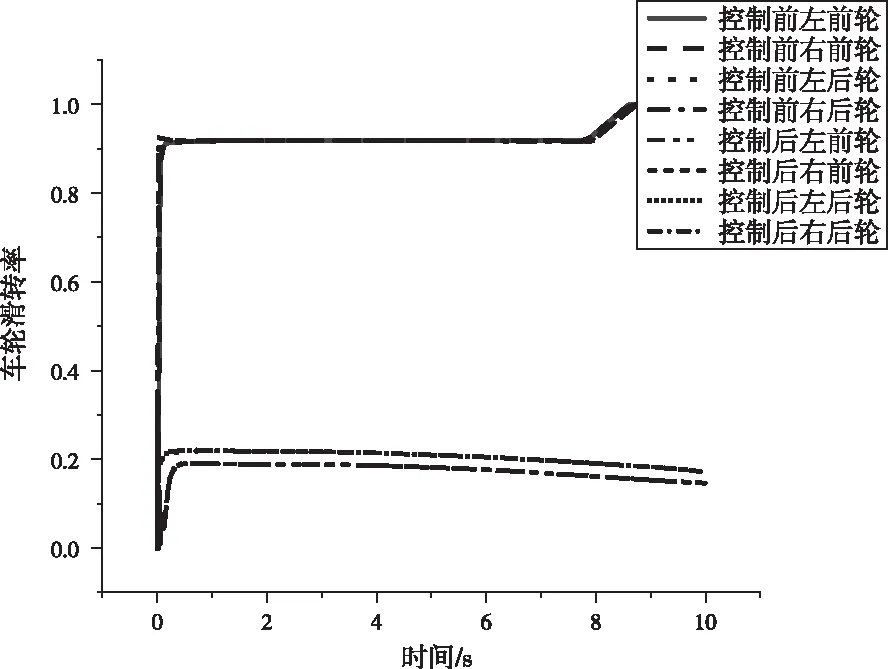
圖21 均一低附直行車輪滑轉率
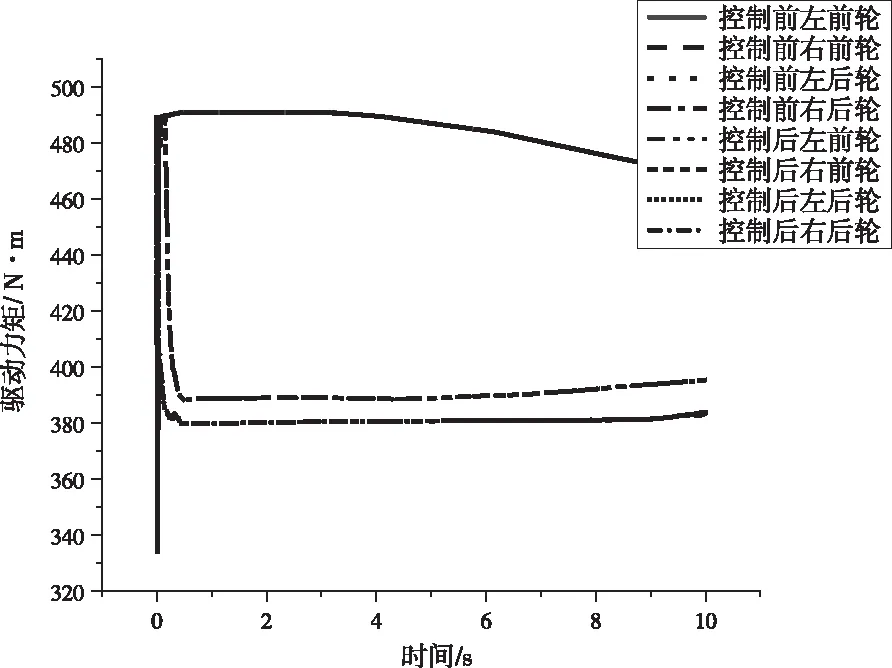
圖22 均一低附直行驅動力矩
從圖中可以看到,沒有控制時,由于路面為低附路面,車輛在剛開始起步時便出現了打滑現象,輪速迅速增加。采取控制后,驅動輪輪速和滑轉率有所下降,縱向車速有所提升,驅動防滑控制策略起到了作用。
2)設置一條均一低附上坡道路,路面附著系數為0.25,車輛從3s開始爬坡,仿真結果如圖23、圖24、圖25、圖26。
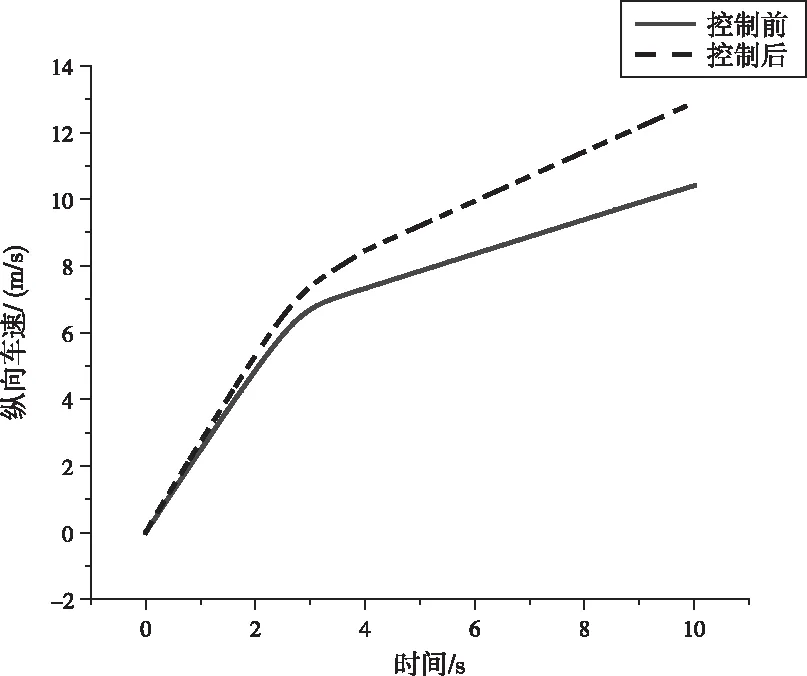
圖23 均一低附上坡車速
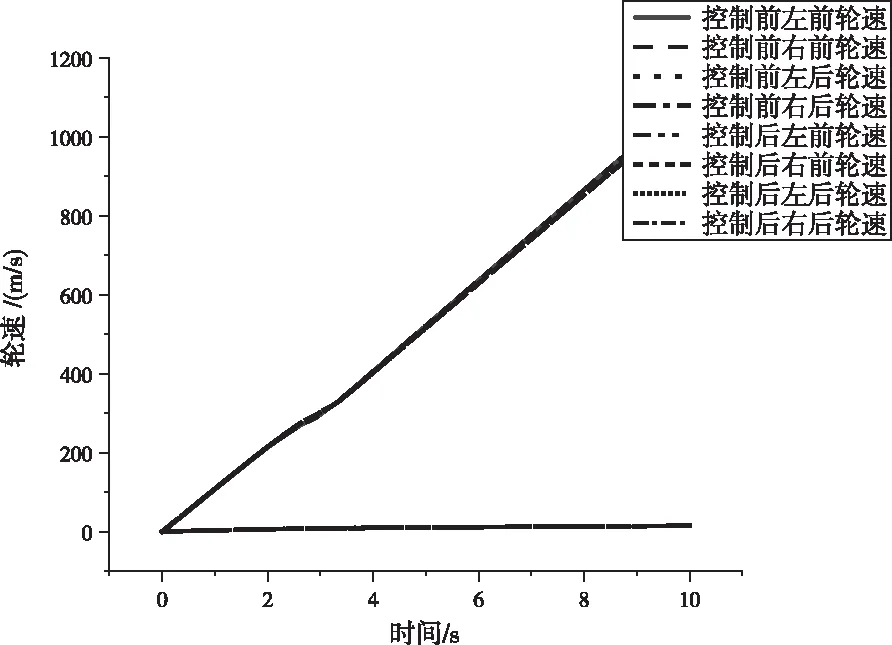
圖24 均一低附上坡輪速
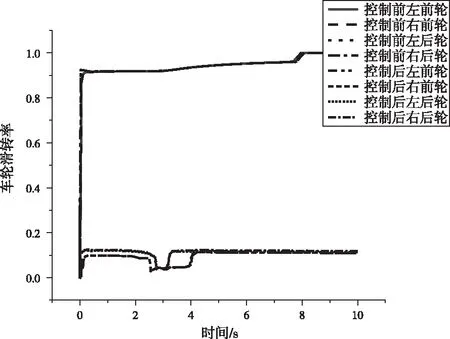
圖25 均一低附上坡車輪滑轉率
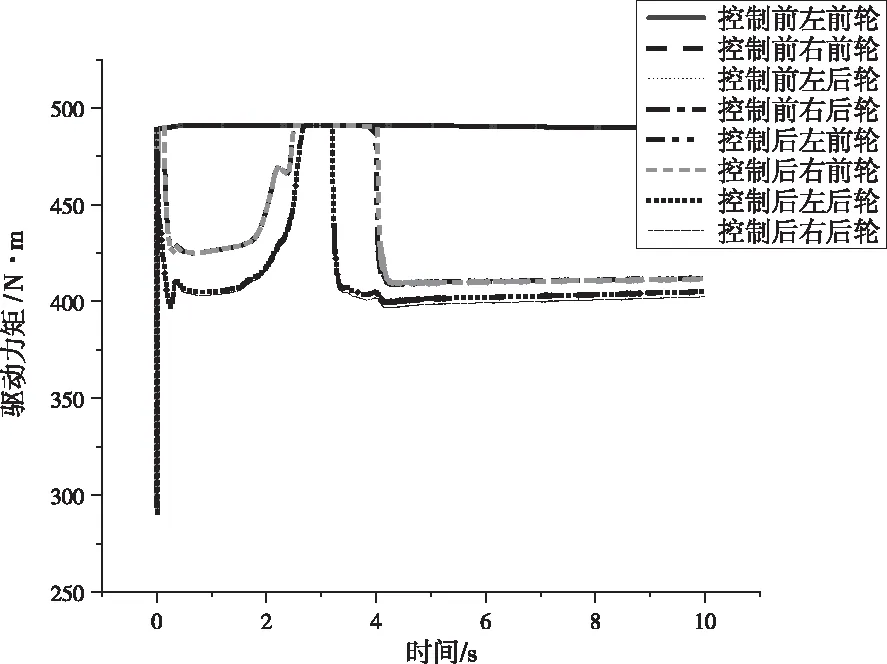
圖26 均一低附上坡驅動力矩
從圖中可以看到,車輛駛入到坡度路面仍舊在加速行駛,但加速度有所降低。沒有控制時,車輛在剛開始起步時便出現了打滑現象,輪速迅速增加。采取控制后,驅動輪輪速和滑轉率有所下降,縱向車速有所提升,驅動防滑控制策略起到了作用。
3)設置一條對接道路,路面附著系數由0.8到0.25,車輛從0m/s起步,仿真結果如圖27、圖28、圖29、圖30。
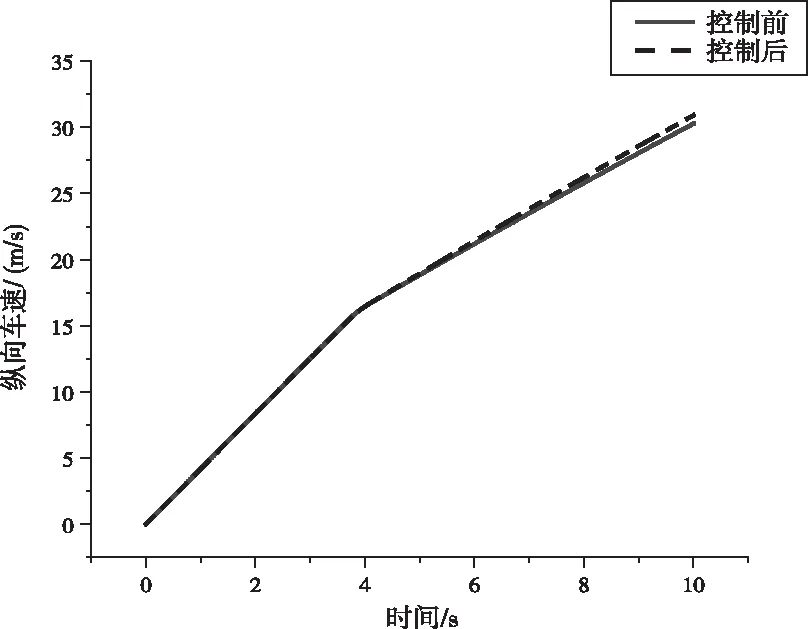
圖27 對接路面直行車速
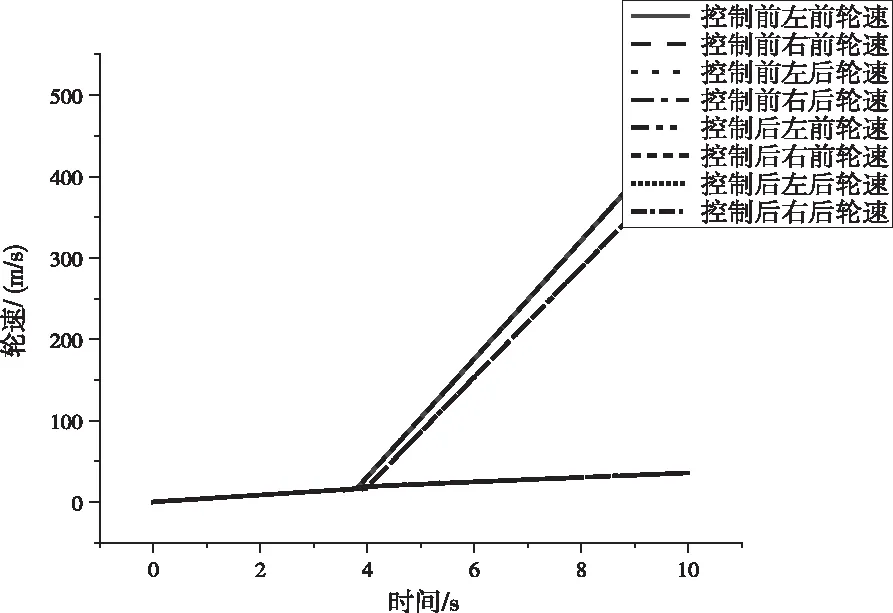
圖28 對接路面直行輪速
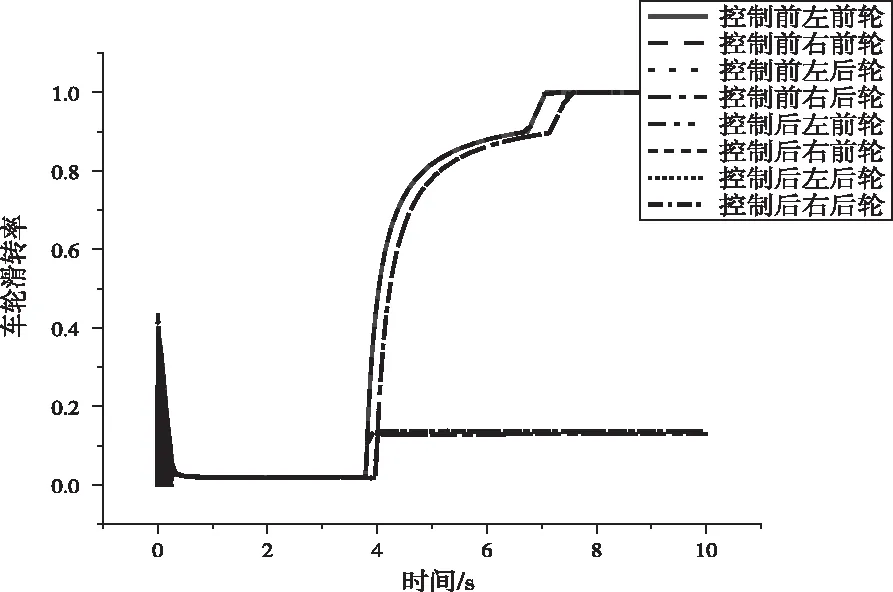
圖29 對接路面直行車輪滑轉率
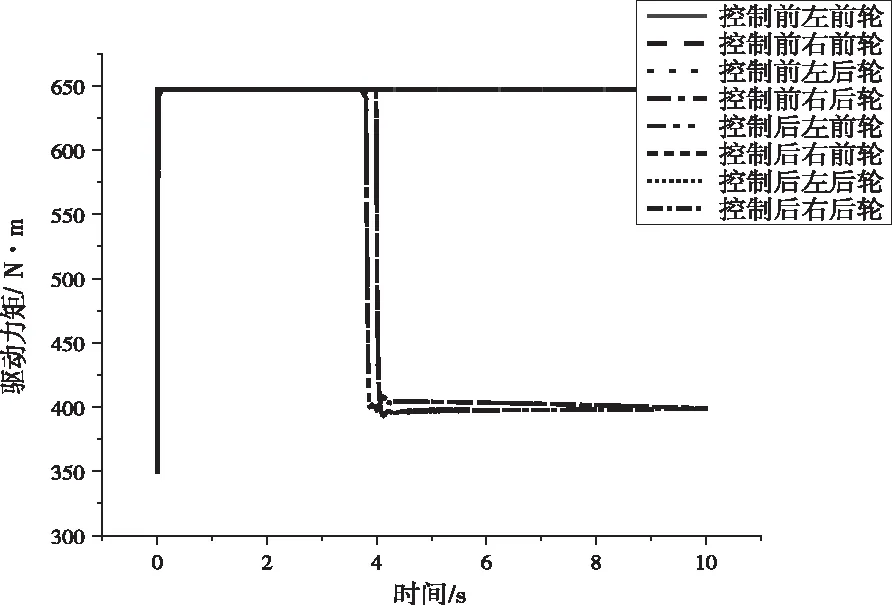
圖30 對接路面直行驅動力矩
從圖中可以看到,車輛在4s駛入低附著路面,速度仍在增加但縱向加速度降低。沒有控制時,車輛在起步時出現了打滑現象,后恢復正常。在駛入低附著路面時,車輪開始打滑,輪速迅速增加,后輪相對于前輪延遲0.2s發生滑轉,符合實際。采取控制后,驅動輪輪速和驅動輪滑轉率有所下降,縱向車速有所提升,驅動防滑控制策略起到了作用。
6 結論
由仿真結果可知,考慮坡度影響的縱向車速和坡度聯合估計結果更加精確,偏差很小;模糊路面識別器能夠精確識別出μmax(峰值附著系數)和sopt(最優滑轉率);積分分離型PID驅動防滑控制策略能夠降低驅動輪輪速,使車輛正常行駛。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
