點陣式LED智能前照燈控制功能算法研究*
2023-05-23 10:29:10高金武王向陽賈志桓付河梁寶雯
汽車技術 2023年5期
關鍵詞:區域
高金武 王向陽 賈志桓 付河 梁寶雯
(1.吉林大學,長春 130022;2.廣州廣日電氣設備有限公司,廣州 510000)
主題詞:點陣式LED 遠光燈 照明光場變換 路面投影 車外交互
1 前言
近年來,汽車保有量逐年遞增,交通出行環境日益復雜。據交管部門統計,一半以上的交通事故發生在夜間[1]。目前單一工作模式的汽車前照燈系統已不能滿足需求,因此智能車燈照明系統對汽車智能化和安全駕駛都具有重要意義。
目前,智能車燈控制系統主要分為隨動式前照燈控制系統和矩陣式前照燈分區控制系統。隨動式前照燈控制系統具有結構簡單、算法實現簡便等優點,但只能實現基本照明光場的整體水平或垂直方向偏移,當對向有來車或行人時,無法兼顧安全駕駛的照明需求和對向來車駕駛員及行人的防眩目需求[2-4]。部分學者在此基礎上進行了硬件、軟件升級及算法優化,使系統模型具有較好的精度,大幅減小了系統超調,延長了前照燈的使用壽命,提高了智能前照燈系統的精度[5-6]。矩陣式前照燈分區控制系統的優點在于多顆LED燈珠按照矩陣的方式排列成行或列,每顆LED燈珠由獨立的芯片控制,多顆單獨可控。但受LED燈珠尺寸的限制,且隨著LED燈珠數量的增加,二次光學系統與其之間的校準難度也會增加,未來像素升級的空間有限[7-8]。此外,針對前照明光場調整控制復雜的特點,有學者提出了固定照明模式和照明燈具模式化的方法,但該控制方式較為單一,可變范圍有限,不能很好地適應復雜的交通環境[9-10]。
針對以上問題,越來越多的汽車生產企業開始采用LED 智能前照燈[11-12]。然而,LED 智能前照燈的控制技術對我國仍處于未公開的階段。
為此,本文對基于點陣式LED 遠光燈照明的實現機制進行研究,對點陣式LED 遠光燈的物理特征及其照明光場的變換需求進行分析,確定點陣式LED 遠光燈的點亮狀況與汽車前照燈照明光場的映射關系,并通過試驗對其控制效果加以驗證。
2 點陣式LED遠光燈的照明需求及其特性分析
2.1 LED前照燈的控制策略設計
本文著眼于建立點陣式LED 遠光燈與地面照明區域的映射關系,實現對汽車前照燈照明光場的變換。點陣式LED遠光燈的照明過程如圖1 所示。在車燈離地高度和偏轉角度一定的情況下,點陣式LED 發光陣列E在地面上的映射照明范圍見圖1a 中的梯形ABCD區域,在此基礎上,根據車輛配備的各種傳感器(速度傳感器、俯仰傳感器等),以及結合高級駕駛輔助系統(Advanced Driving Assistance System,ADAS)提供的周圍環境信息,明確前照燈的照明需求,在梯形ABCD區域的基礎上,對照明區域進行分割細化,實現夜間駕駛的照明需求(高速、城市、鄉村、交叉路口等照明模式),見圖1b,最終輸出照明效果見圖1c。
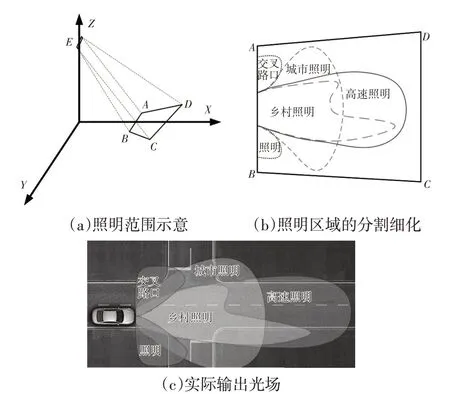
圖1 點陣式LED智能前照燈光場調整示意
本文的關鍵在于如何將期望的照明需求轉化為點陣式LED遠光燈中每個LED燈珠的控制命令。即通過求取前照燈控制輸入與照明光場的映射關系,再依據前照燈照明需求,確定需要點亮的LED陣列的坐標位置,實現對汽車前照燈照明光場的精確控制。
2.2 LED前照燈特性分析
汽車前照燈以非成像光學為理論基礎,利用反光杯、透鏡等光學器件的特性和光學原理對前照燈光源發出的光線進行二次光學設計,在目標平面上形成特定的光線分布。發光陣列P經透鏡組輸出的實際光路如圖2a所示。
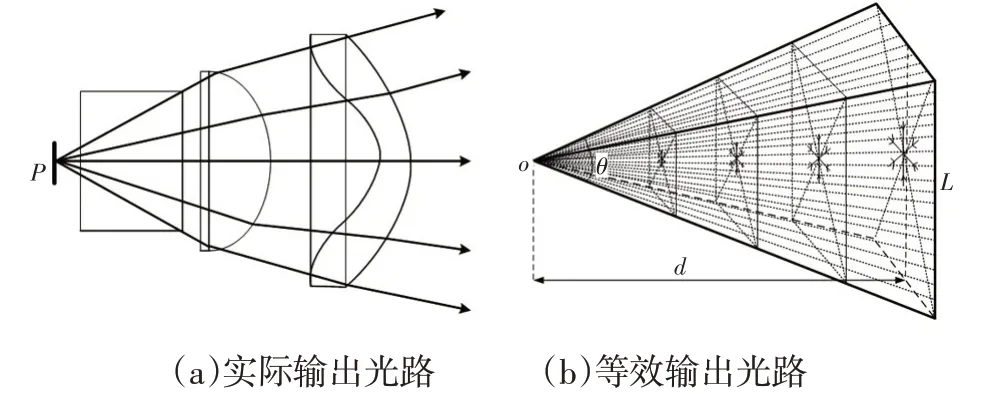
圖2 車燈光場輸出光路示意
無論汽車前照燈內部的光學系統如何復雜,對前照燈所需要的照明效果而言,只關心其最后輸出的照明光場。將圖2a等效為如圖2b所示的點光源o,其輸出的照明光場是線性放大的過程。
為了描述圖2b的等效輸出光場,需獲取點光源o輸出光場的出射角θ及與點光源o的距離為d時對應輸出光場區域的邊長L,見圖2b。且d與L的關系為:
式中,K為邊長L隨距離d變化的放大系數。
根據式(1),再結合圖2b 的等效輸出光場,依據幾何關系得到θ、d及對應L的關系,進而求得出射角θ:
3 點陣式LED遠光燈控制功能算法
3.1 映射關系的建立
點陣式LED 遠光燈控制系統需要靈活精準地調整照明光場,實時動態地滿足駕駛員夜間駕駛照明需求。其關鍵在于,確定發光陣列中每個像素點在地面上的映射地址。
本文研究的點陣式遠光燈的簡要照明光場如圖3所示,其中,h、β分別為前照燈光源的離地高度和向下偏轉的角度。
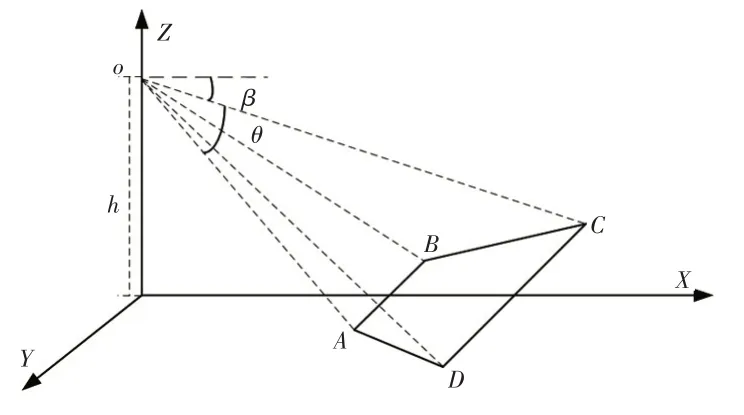
圖3 點陣式LED遠光燈的照明光場示意
考慮圖3 中的點陣式LED 遠光燈控制系統是以離地一定高度和偏轉角度投射到地面上,結合式(1)可知投射到地面的光場為等腰梯形,映射過程如圖4所示。
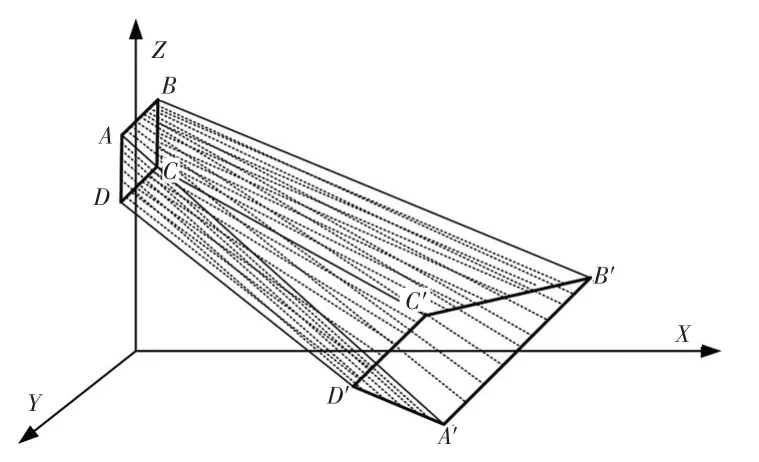
圖4 LED發光陣列映射到地面的過程示意
設點陣式LED遠光燈控制系統的LED發光陣列為M行、N列的矩形,即含有數量為M×N的LED 發光點。將其按先行展開,再列展開的方法和步驟確定LED 發光陣列中每個像素點與地面照明區域的映射關系。
按行展開時,考慮到LED發光陣列為M行,將出射角θ均分為(M-1)份,如圖5所示。

圖5 空間直角坐標系下M行對應的x坐標
則各行在地面的坐標值xi,i∈[0,M-1]表示為:
接著,再將其按列展開,如圖6 所示。求取xi,i∈[0,M-1]坐標值處的照明寬度Li,i∈[0,M-1],Li隨與車燈點光源距離di,i∈[0,M-1]的大小按一定的規律變化,可表示為:
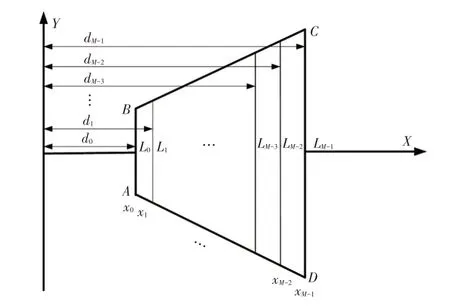
圖6 xi坐標位置處的照明寬度Li隨距離di的變化
式中,n2∈[0,(M-2)∕2+k]為整數。
將di代入式(1),得到對應的光段寬度Li為:
此時xi對應的Yi坐標值為:
式中,n3∈[0,N-1]為整數。
至此,點陣式LED 發光陣列中每一個像素點與地面照明區域的映射關系已確定。
3.2 照明實現
結合上述算法,可以建立LED 發光陣列中任一發光點(x,y)與地面照明區域中的位置地址(X,Y)的映射關系。首先,將其按行展開,結合式(3)確定第x行在地面映射照明區域中的位置坐標X,再結合式(4)和式(5)得到地面照明區域中第X行處對應輸出光場的照明寬度L。最后,結合式(6)可以得出發光點(x,y)在地面第X行處對應的Y坐標值。同理,亦可通過上述算法反求出地面照明區域中任一位置在LED發光陣列中的映射發光點。
4 試驗驗證及分析
4.1 試驗系統搭建
本文搭建的試驗系統硬件實物如圖7所示,主要包括集成高分辨率LED 光源(EVIYOS)、LRS-350W 開關電源、USBCAN II FD調試分析儀、計算機。
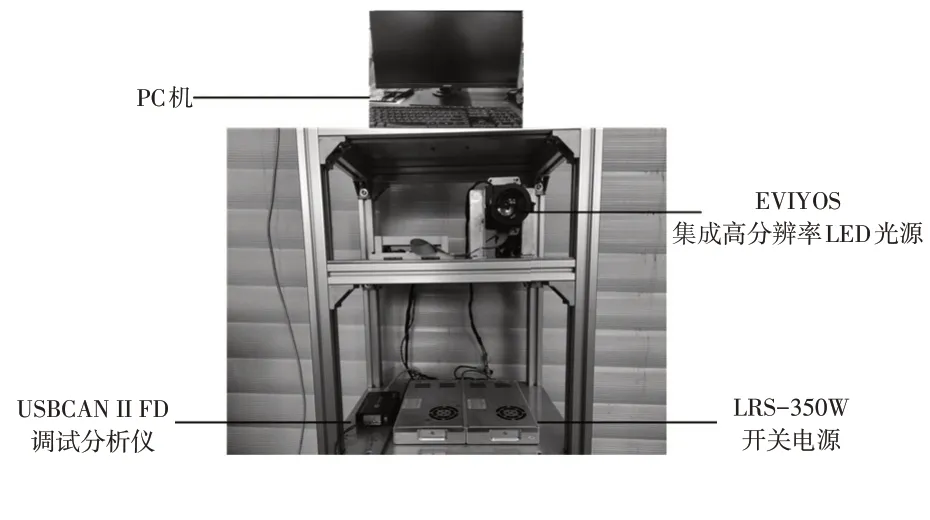
圖7 試驗臺架系統結構示意
首先,LRS-350W 開關電源將220 V 交流電轉化為24 V 和12 V 直流電分別為集成高分辨率LED 光源和USBCAN II FD 調試分析儀供電,并計算機中將車載傳感器獲取到的路況信息結合ADAS 對信號進行綜合分析和評價,確定夜間駕駛的照明需求。然后,結合式(3)~式(6),確定LED發光陣列在地面上的映射照明區域,然后動態調整照明光場,輸出滿足夜間駕駛照明需求的光場;USBCAN II FD 調試分析儀將計算機產生的光場照明需求以CAN 信號的形式傳送至車燈控制端;集成高分辨率LED光源輸出照明光場。
本文試驗中選取的LED 點陣式發光陣列為歐司朗,它包括1 個EVIYOS 芯片和3 個透鏡組成的透鏡組。每個EVIYOS 芯片有1 024 個獨立的可尋址芯片,共有1 024(32×32)個像素點,如圖8所示。它是一款可配置的多像素光源,由微結構自適應前照明光場系統智能硅襯板組成,為高分辨率有源矩陣LED 陣列。采用表面組裝技術(Surface Mount Technology,SMT),無機械活動部件,輸出光場的調整依靠LED 像素陣列的開關完成。
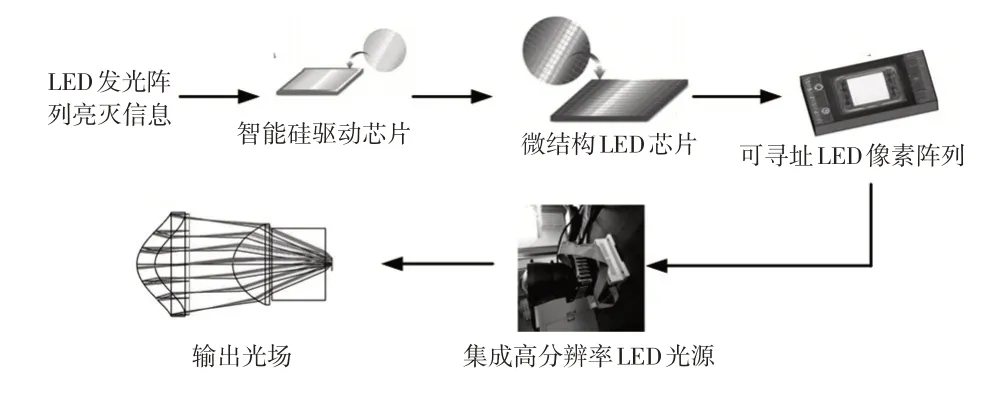
圖8 車燈結構示意
4.2 系統參數辨識
本文試驗臺架離地高度h=76 cm,車燈向下偏轉角度β=π∕12,基于此,求取LED 照明陣列在地面的映射照明區域。
首先,采集試驗臺架與車燈發光源的距離d,以及對應輸出光場區域邊長L的數據,對上述數據進行處理,并借助MATLAB數學工具進行數據擬合,求取邊長L隨距離d的放大系數k,如圖9所示,擬合后數學關系為:
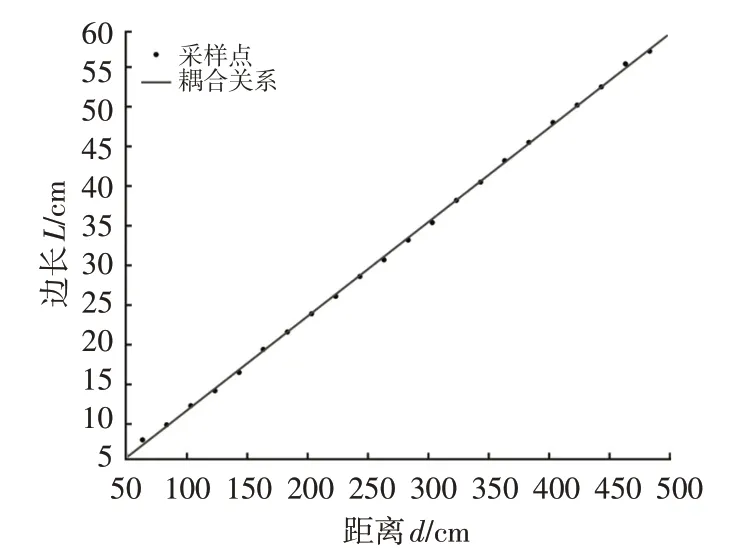
圖9 數據擬合的函數圖像
基于式(1),考慮到實際工程測量中的誤差,分析得出式(7)中的-0.166 7 為測量過程產生的誤差擾動量,將誤差擾動量消除后得到對應的映射關系表達式為:
式中,L為對應輸出光場區域邊長;d為距車燈發光源的距離。
再結合式(2)和式(3)可以求解出LED 發光陣列的出射角θ:
4.3 點陣式LED遠光燈控制策略的實現及仿真研究
4.3.1 點陣式LED遠光燈控制策略
首先對試驗臺架進行系統參數辨識,求取車燈照明區域隨距離的放大倍數。然后由車燈所在的實際高度和偏轉角度,結合本文的點陣式控制算法,確定點陣式LED遠光燈的點亮狀況與照明光場的映射關系。最后,在試驗環境下搭建相應的試驗系統,在計算機中基于VC++建立上位機界面,依據映射關系對集成高分辨率LED 光源(EVIYOS)中LED 燈珠的亮滅狀況進行控制,借助USBCAN II FD 調試分析儀,將計算機產生的控制命令以CAN 信號的形式傳送至車燈控制端;LED 光源(EVIYOS)輸出照明光場。所提出的控制策略流程如圖10所示。
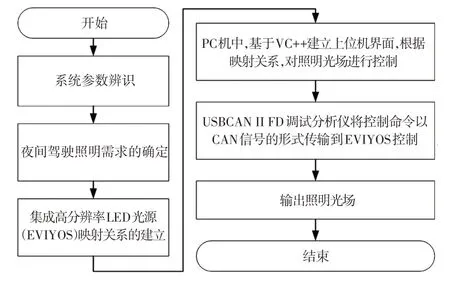
圖10 點陣式LED遠光燈控制策略流程
4.3.2 仿真研究
選用MATLAB 作為仿真工具,編寫M文件,將本文算法轉換成對應的代碼進行仿真。
將點陣式LED 遠光燈控制算法確定的照明區域中的發光點打印輸出,并進行簡單的光場變換,輸出斑馬線和數字-3,輸出的仿真結果如圖11、圖12所示。
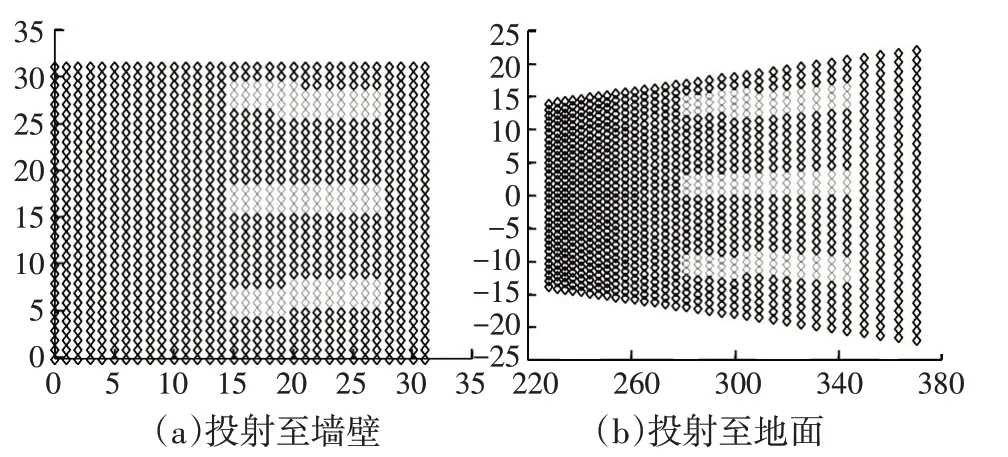
圖11 斑馬線的輸出仿真效果
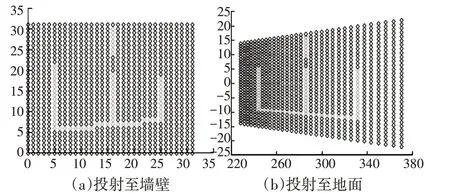
圖12 數字的輸出仿真效果
如圖11a 和圖12a 所示,投影至墻壁上的光場具有非線性畸變的特點,而通過本文的控制算法輸出控制命令至控制器,投影輸出至地面的光場如圖11b 和圖12b所示,該仿真結果驗證了控制算法的有效性。
4.4 驗證結果分析
在上述試驗環境下,采用本文控制算法,分別針對不同情況下的點陣式LED 遠光燈進行測試:包括路面投射高清警告∕交互標志(斑馬線、駕駛艙內溫度)、照明光場的調整和防眩目交通場景的應用驗證。
4.4.1 路面投影交通警告∕交互標志
針對夜間車輛行駛經過無交通燈路口,需禮讓行人的情況,在路面投射出斑馬線,已知LED發光陣列離地高度h和偏轉角度β的情況下,計算獲得的斑馬線輸出效果如圖13所示。
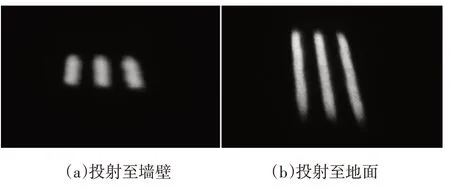
圖13 投射斑馬線輸出仿真效果
由圖13a可知,垂直投射到墻壁時圖像存在一定畸變,短且傾斜;由圖13b 可知,投射到地面時,圖像線性度較好,無明顯失真和畸變現象。
針對車前照明光場的靈活調整,投射出簡單的數字,計算獲得的數字輸出效果如圖14所示。
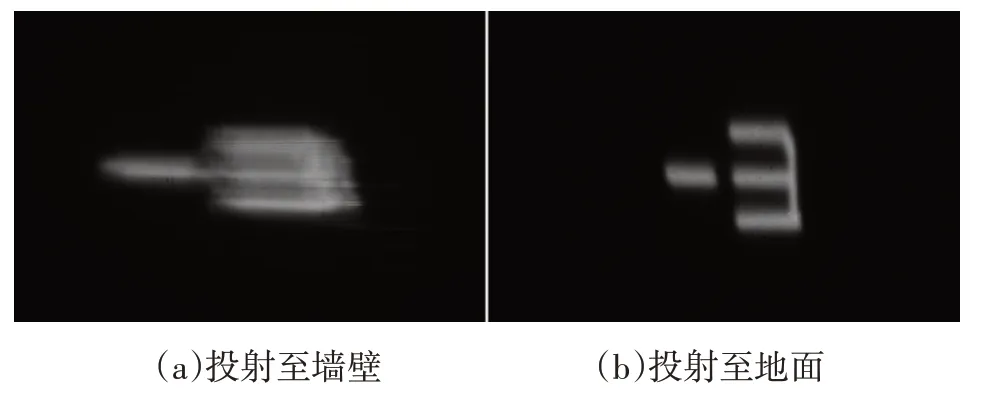
圖14 投射簡單數字輸出仿真效果
由圖14 可知,投射到地面的效果圖無明顯失真和畸變現象。
4.4.2 照明光場的調整和防眩目交通場景的應用驗證
針對當前車輛夜間照明形式單一,行駛過程中遠光燈產生炫目,易引發交通事故的情況。計算機模擬ADAS 系統,感知周圍環境,獲取對向行人和駕駛員的位置信息,再由計算機按照上述控制算法動態調整照明光場,輸出滿足夜間駕駛照明需求的光場,并通過USBCAN II FD調試分析儀將光場照明需求以CAN信號的形式傳送至車燈。用鏡子代表夜間駕駛時對向行人及駕駛員面部所在位置,試驗結果如圖15 所示。由圖15可知,夜間光場調整后,處于對向行人及駕駛員面部位置的燈光被消除掉,表明采用本文的控制方法能夠使對向行人和駕駛員避免直接面部照射,實現了防炫目的需求。
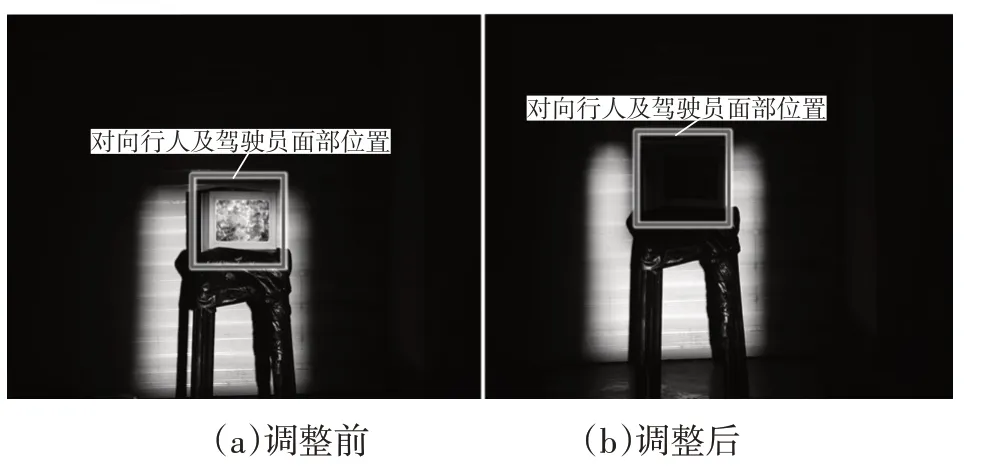
圖15 防眩目光場調整示意
在上述防眩目交通場景的應用的基礎上,實時動態調整照明光場,輸出規則圖形,如圖16所示。
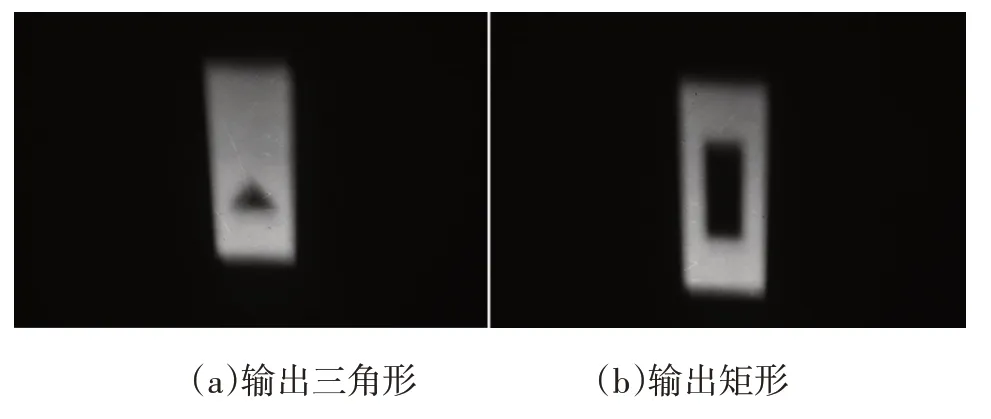
圖16 車前光場調整示意
由圖16 可知,本文的控制算法可以實時動態調整車前照明光場,進一步實現防炫目的需求。
5 結語
本文針對點陣式LED 遠光燈,提出了基于不同路況和周圍環境的點陣式LED 遠光燈像素級控制策略,在保證點陣式LED 遠光燈正常照明的前提下,通過對輸出光場進行調整與控制,實現了在路面上投射常見的高清警告∕交互標志,并對防眩目交通場景進行應用驗證。結果表明,該算法可精確調整車前照明光場,提高了夜間駕駛的安全性,改善了夜間駕駛的環境舒適度。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15