無人水下航行器智能避碰系統技術研究綜述
2023-05-04 02:42:06王亞波趙恩嬌
兵器裝備工程學報 2023年4期
王亞波,張 可,趙恩嬌
(1.武漢第二船舶設計研究所, 武漢 430060;2.哈爾濱工程大學, 哈爾濱 150001)
0 引言
隨著海洋裝置技術的發展,無人水下航行器(unmanned underwatervehicle,UUV)在民用和軍事領域上發揮著巨大的作用。在軍事上UUV可以獨立執行作戰任務,例如魚雷具有自主航行和制導的能力,可以攻擊敵方的潛艇或者軍艦等高價值目標。民用方面,可以在海底資源探測、水下搜救以及海底目標識別上等具有廣闊的應用。UUV在水下航行過程中通過環境感知系統獲取水下環境信息,避碰系統接收感知系統獲取的數據來規劃一條避碰路徑,提高了UUV的生存能力[1-2]。由于水下環境比較復雜,如果UUV在執行任務的過程中發生了碰撞,會增加執行任務成本。因此,對UUV的避碰系統展開研究具有重要的工程意義。隨著信息化和智能化的發展,在UUV的避碰系統中引入智能化算法成為未來的發展方向。
本文首先介紹了UUV的避碰系統的基本組成和國內外研究現狀,重點分析了UUV的環境感知技術和避碰智能算法,最后對UUV的避碰系統發展方向作出了展望。
1 無人水下航行器避碰系統
1.1 避碰系統組成
無人水下航行器智能避碰系統的原理圖如圖1所示。環境信息感知系統利用傳感器采集周圍環境的障礙物信息,把采集信息傳入避碰系統中,由避碰系統給出相應的執行指令,最后由操縱系統完成相應的動作。
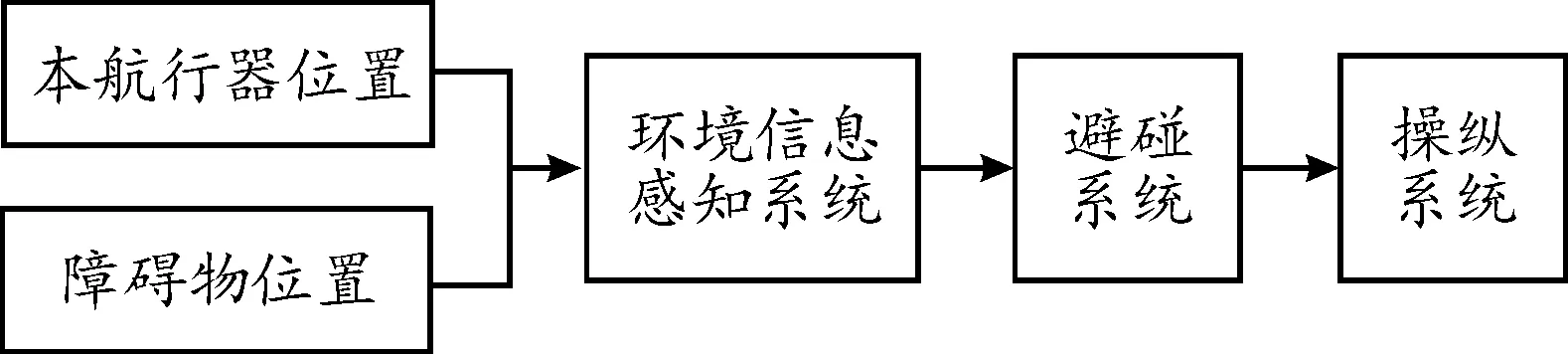
圖1 無人水下航行器避碰原理圖Fig.1 Schematic diagram of collision avoidance for UUV
在避碰系統中,根據最近會遇距離(distance to closet point of approach,DCPA)的大小來判斷航行器是否存在碰撞危險,根據到達最近會遇點的時間(time to closet point of approach,TCPA)來估計危險程度[3]。根據DCPA和TCPA等因素可以判斷無人水下航行器的危險程度。因此,研究無人水下航行器的碰撞危險度是無人水下航行器避碰系統的發展方向。
1.2 國內外現狀
無人水下航行器的避碰問題是一種動態規劃問題,由于沒有水下環境的先驗知識,只能依靠傳感器系統采集水下環境信息。通過避碰算法來對周圍環境進行感知的方法相比全局路徑規劃更具有實用性[4]。傳統的避碰規劃包括圖像化方法和快速步進法。這2種方法都存在一定的不足,由于水下環境比較復雜,航行器感知存在局限性,使得圖像法很難完成避碰任務,針對這一問題,Stentz[5]提出了D*算法,在求解過程中更新避碰成本的參數,解決了復雜環境的避碰問題。Feerguson[6]提出了filed D*算法,采取均變分辨率網格來描述航行環境,降低了算法計算量,但是該方式的代價函數是線性的,所以適應性比較差。文獻[7]在Feerguson的filed D*算法基礎上提出了非線性的代價函數,并將算法應用在解決了強海流的動態環境中的避碰問題。Philippsen等[8]將Fast Marching(FM)算法用于避碰問題中,FM算法可以實現主動路徑規劃,具有較高的可靠性,但是存在計算時間長等問題[9]。針對FM計算量大問題,Peter等[10]提出了A*算法,考慮了海流和航行器轉彎半徑,有效提取了二維連續路徑,提高了規劃的時間。
目前智能避碰算法主要有模糊控制算法、粒子群算法和改進人工勢場算法。模糊控制算法具有良好的魯棒性,但是模糊規則的設計依賴于環境和航行器的特性,導致其泛化能力差。文獻[11]采用自適應梯度神經模糊算法推理系統解決了無人水下航行器的避碰問題。粒子群算法(particle swarm optimization,PSO)具有搜索速度快和搜索能力強的特點[12]。為提高系統的收斂性能,潘洪悅[13]在粒子群算法中引入遺傳算法的種群共享極值策略。嚴浙平[14]提出了將路徑點導航和PSO相結合的方法,加快了避碰系統的收斂速度,縮短了航行器避碰的時間。
避碰系統可以利用智能算法實現在水下復雜環境下的路徑動態規劃。其中,無人水下航行器對周圍環境的感知是實現避碰系統的基礎。無人水下航行器獲取周圍環境信息越準確,避開障礙物的成功率越高。下一節將敘述當前主流的環境信息感知技術。
2 環境信息感知技術
2.1 環境感知技術
環境感知是指通過傳感器獲取航行器的姿態和周圍環境信息,再由通信設備傳給控制系統做出決策指令的過程。
環境感知技術包括主動感知和被動感知。被動感知是航行器利用自身攜帶的傳感器被動接收周圍環境信息。主動感知則是基于雷達和聲吶傳感器通過發射信號、收集和處理信號的方式來主動獲取周圍環境信息的感知方法。
2.2 基于雷達的環境感知
雷達是無人水下航行器中環境感知系統的重要組成部分。雷達掃描的結果不僅可以轉化為圖像,而且掃描結果不受外界環境的影響,可以精確估計出障礙物的位置。本小節將重點介紹激光雷達、毫米波雷達和航海雷達技術。
2.2.1基于激光雷達的環境感知技術
激光雷達可以獲得更準確的目標信息并具有抗干擾能力強等優點。劉冰洋[15]在無人船上搭載激光雷達解決了獲取河底地形難的問題。鄭又能[16]針對水面波紋會對目標識別產生誤差的問題,提出一種將相機和三維激光雷達數據融合的目標檢測方法。趙玉梁[17]利用點云梯度分割方法對欄格地圖法進行補充,提出了復雜水域環境下的目標識別方法。
三維激光雷達通過多條旋轉掃描能夠有效得到障礙物的大體特征,并且測量精度比傳統雷達高。但是光信號受環境影響很大,面對惡劣天氣下三維激光雷達探測效果不佳。
2.2.2基于毫米波雷達的環境感知技術
毫米波雷達是通過發射毫米波段的電磁波來獲取環境信息,且比激光雷達更具有穿透力,更容易檢測到有效目標且具有全天候的工作能力[18]。林雨田[19]針對靜態目標識別使用毫米波雷達會存在目標缺失的問題,使用高斯馬爾科夫模型對毫米波雷達檢測結果進行標簽數據,然后結合高斯聚類方法對目標的標簽數據進行預測,提高了對靜態目標的精度。
在汽車領域中毫米波雷達應用最為廣泛,由于海域環境比較復雜,毫米波的探測性能也會受到限制。無人水下航行器使用毫米波探測周圍信息時,需提高毫米波雷達的可靠性。
2.2.3基于航海雷達的環境感知技術
航海雷達是雷達中應用最為廣泛的一種,技術已經非常成熟。在無人水下航行器中用來定位、探測障礙物和對目標的跟蹤。李立剛等[20]針對海上大型目標,航海雷達容易誤判為多個海上分散目標的問題,提出了一種基于圖像輪廓特征的航海雷達的目標修正方法。面對不同大型目標的同一輪廓,可以進行準確地描述。吳鵬等[21]為了提高對水面上小型目標的感知能力,將航海雷達與光電吊艙結合起來進行協同感知,提高了對目標的探測與識別的能力。胡智煥等[22]利用航海雷達在動態的海洋環境下進行實時獲取周圍障礙物的位置信息,無人艇的碰撞系統根據障礙物的位置信息快速做出響應,最終快速計算出一條無障礙的路徑。在傳統的雷達跟蹤方法中會受到海波的干擾,獲取的位置信息會帶有噪聲,進而導致數據存在誤差。高朋舉[23]引入NLM算法對航海雷達獲取的圖像信息進行降噪處理,得到了精度更高的海冰密集度參數。
激光雷達搜索能力強,但其搜索性能會受到環境的影響。面對煙霧環境,毫米波雷達具有更好的穿透力,廣泛應用于汽車領域。而航海雷達是雷達技術應用中最成熟的一種。面對水下復雜環境,可以結合不同雷達的優勢,從而提高雷達對周圍環境感知的精度。避碰系統在獲取周圍環境信息之后會產生相應的動作指令,使無人水下航行器完成避障。因此,下一節將敘述智能避碰算法。
3 智能避碰技術
隨著無人水下航行器的智能化發展,通過引入智能算法來解決傳統無人水下航行器的避碰問題。本節將介紹模糊控制、粒子算法和改進人工勢場等智能算法在無人水下航行器避碰問題中的應用。
3.1 基于模糊控制的智能避碰方法
由于水下環境比較復雜,系統的參數很難用線性的方程,準確地描述出來,因此,引入模糊控制方法。模糊控制是一種不依賴于被控對象的非線性控制系統,適合引入無人水下航行器的避碰系統。該方法是通過模糊化接口使輸入值變成模糊變量并傳入推理機中,推理機結合數據庫和規則庫得到輸出的模糊值,最后通過解模糊接口得到最終的結果。模糊算法的原理如圖2所示。
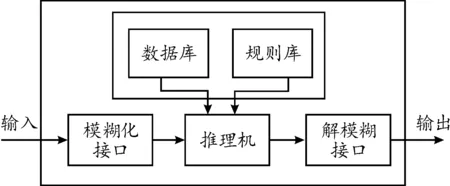
圖2 模糊算法原理Fig.2 Principles of fuzzy algorithms
模糊控制算法的改進主要在模糊分類和模糊推理這兩部分。①模糊分類,選取合適的隸屬函數可以提高模糊控制算法的性能,是解決智能避碰問題的關鍵。Hasega-wa[24]用三角形和梯形隸屬函數來表示模糊變量,實現了輸入值的模糊化。Hara[25]在Hasega-wa的基礎上加入了船員的主觀感受影響,提高了模糊變量分類的準確性。②模糊推理,L.P.Perera在智能避碰系統中采用模糊最大優先算法(fuzzy maximum first,FMF)[26]。G.K.Park通過結合其他智能算法,在避碰模糊推理算法中引入案例推理(case based reasoning,CBR)[27]。
基于模糊控制的無人水下航行器智能避碰方法中的控制量需要以模糊集合為基礎,其優點是解決推理過程中非確定性問題,但是需要根據經驗法來提前設定參數。因此模糊控制的自適應性還有待提高。
3.2 基于粒子算法的智能避碰方法
PSO算法是一種尋找最優解的過程,而無人水下航行器的避碰問題也可以被看作成一種尋找路徑最優解的過程。粒子算法流程如圖3所示。

圖3 粒子算法原理圖Fig.3 Schematic diagram of particle algorithm
在無人水下航行器中,引入PSO粒子算法可以簡化避碰系統,基于PSO算法的避碰系統主要流程分為:① 初始化航行器的位置以及粒子算法的參數;② 根據初始信息對航行器進行路徑規劃;③ 評估本航行器與障礙物的避碰風險,若存在避碰風險則重新進行路徑規劃來進行避障,若沒有避碰風險則繼續航行;④ 判斷航行器是否到達目的地,若沒有到達目的地則繼續航行,若到達目的地則流程結束。具體流程圖如圖4所示。由圖4可知,粒子算法尋優能力的好壞決定了避碰系統性能的好壞。為了提高PSO算法的尋優能力,許諾[28]進行動態調整PSO算法的慣性權重和認知參數,提高了算法的局部搜索能力。Sun[29]把粒子算法和量子力學理論相結合,提出了一種新的離子算法(quantum behavior particle swarm optimization,QPSO)。姚琪[30]研究了粒子凈化的方式和QPSO的原理,提出了一種自適應強的粒子分類凈化QPSO算法。郭興海[31]針對海流環境不穩定的避碰問題,引入了混沌圖機制和動態權重機制。大大提高了QPSO算法的搜索能力和計算速度。
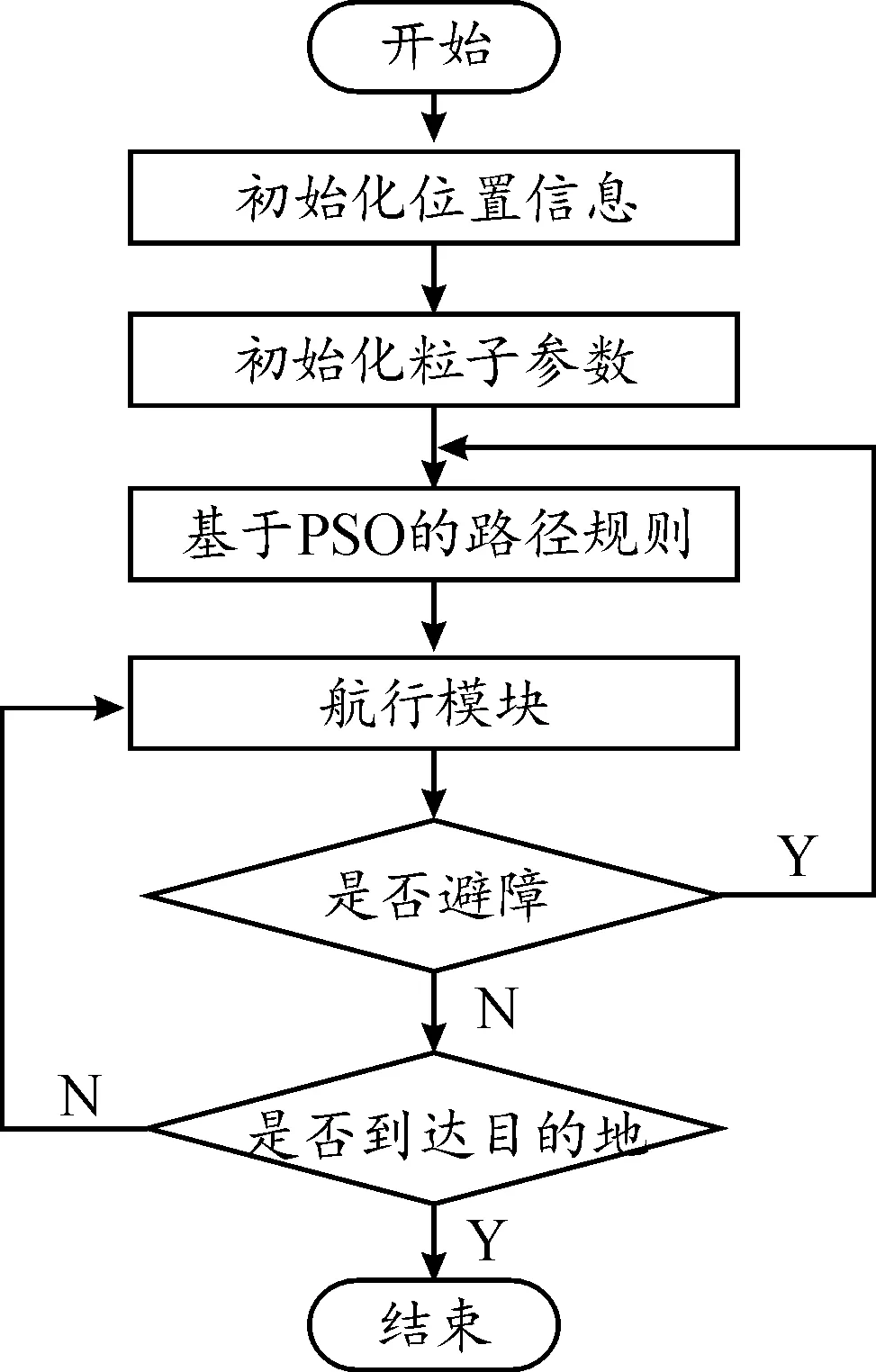
圖4 基于PSO的無人水下航行器避障系統流程圖Fig.4 Flow chart of obstacle avoid system for UUV based on PSO
以上方法均是通過對PSO算法改進來提高算法的尋優能力。由于粒子算法在尋優的過程中并未考慮航行器避障系統可靠性以及路徑平滑性問題,從而會導致航行器的航行成本增加。倪生科[32]考慮了航行器的路徑長度、可靠性以及平滑度等因素,結合了非線性規劃的方法,提出了一種混合的遺傳算法,考慮到避碰問題中路徑最優的問題。除了使用其他智能算法改善航行器路徑可靠性和平滑性之外,可以借鑒粒子算法與滑模控制理論來提高系統的可靠性和抗干擾能力。李沁穎[33]利用粒子優化算法獲得滑模控制器的最優參數,實現聯網車隊系統的可靠性以及車隊系統的魯棒性。陳志梅[34]將粒子算法和滑模控制相結合,利用粒子算法優化滑模控制趨近律系數,實現了系統狀態消除抖振現象并且快速到達滑模面,改善系統動態性能和魯棒性。因此,針對PSO算法對航行器進行避碰存在的規劃路徑是否最優、可靠性以及平滑性等問題,可以設計一個滑模控制器,采用粒子算法對滑模控制參數進行優化,提高航行器避障系統的魯棒性以及規劃路徑的平滑性。
3.3 基于改進人工勢場的智能避碰方法
在無人水下航行器避碰系統中,引入改進人工勢場法的思想是把無人水下航行器的運動被看作是在人造引力場中運動。在航行的過程中,周圍的障礙物對航行器產生“斥力”,而最終目的地對無人水下航行器產生“引力”,當航行器航行路線上存在障礙物時,會收到引力場和斥力場的疊加,最終產生一個使航行器避開障礙物的合力。
當目的地對無人水下航行器的引力與障礙物對無人水下航行的斥力相等時,航行器所受合力等于零,此時航行器陷入極小值就無法航行出障礙物區域,改進人工勢場法就會陷入局部最優解。假如障礙物在目的地附近的話,航行器則永遠不能到達目的地。因此,需要考慮如何設計“引力場”和“斥力場”函數來避免控制系統陷入局部最優解的問題。馬小軒[35]通過設置距離法和子目標點法來改進傳統人工勢場法,解決了系統容易陷入局部最小值和目標不可達問題。郭凱紅[36]改進斥力場和引力場函數的參數,解決了無人水下航行器局部路徑規劃問題。張強[37]提出用滑移區來代替障礙物產生的斥力場方法,并制定一系列滑移規則包括(滑移區判斷、滑移區方向判別和參數的選取)。最后在固定海流的環境下實現水下自主航行器的路徑規劃。為了提高航行器按照規劃路徑進行航行的精度,施立煜[38]利用人工勢場法對船舶進行路徑規劃,將反步思想和積分滑模控制相結合,實現船舶對期望路徑的有效跟蹤并在船舶航行過程中實現了避障。韓麗君[39]利用濾波反步法實現了AUV軌跡跟蹤精度的優化。李娟[40]采用濾波反步法設計控制器,使UUV跟蹤期望路徑。
在無人水下航行器的避碰系統中引入改進人工勢場法,并結合濾波反步法設計控制器使航行器來跟蹤期望路徑,提高了無人水下航行器按照規劃路徑航行的精度。改進人工勢場法使系統結構清晰,規劃出來的路徑比其他智能算法更平滑。但是改進人工勢場法的缺陷還是很明顯,目前解決陷入局部極小值的方法就是對“引力”和“斥力”函數進行改進,或與其他智能算法進行結合。
4 結論
UUV的環境感知和路徑規劃在避碰系統中占重要地位,本文著重介紹了無人水下航行器智能避碰系統中的環境感知系統和智能避碰方法。通過總結和分析發現,在實際的海底環境下,存在渦流和強烈海波的復雜環境,傳統的傳感器很難準確描述出環境信息,進而導致傳統的路徑規劃算法很難抵消這些強干擾對系統的影響。為了解決上述問題,可以引入學習能力更強的深度強化學習算法(deep reinforcement learning,DRL),DRL的原理如圖5所示。可以解決當環境感知系統不能準確獲取環境信息時而導致UUV很難規劃路徑的問題。例如,DRL算法具有做出自主決策的能力,可以實現對UUV航行環境的理解并做出最優決策。并通過設計回報函數來提高DRL的計算速度,提高搜索效率,縮短系統的收斂時間。隨著人工智能算法的不斷更新,未來有望解決UUV環境先驗知識不足情況下的避碰問題。因此,在UUV避碰系統中應用新一代人工智能算法是未來的主要發展方向。
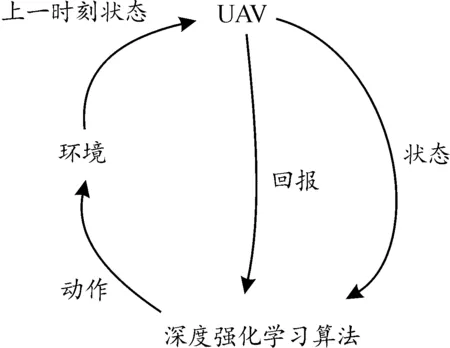
圖5 基于深度強化學習的路徑規劃Fig.5 Path planning based on deep reinforcement learning
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26