基于SDT模型和蒙特卡洛法的槍械拋殼機構公差分析
2023-05-04 03:00:42位躍東
兵器裝備工程學報 2023年4期
位躍東,方 峻
(南京理工大學, 南京 210094)
0 引言
在槍械產品生產制造過程中,由于槍械產品零件尺寸小、形狀不規則、精度要求較高,且在計算裝配尺寸鏈涉及尺寸較多,計算尤為復雜。因此為了提高槍械產品質量,保證裝配精度,對槍械典型機構進行公差分析顯得尤為重要。目前,在三維公差設計領域,采用小位移旋量(small displacement torsor,SDT)模型和蒙特卡洛法可以較為精確地描述公差及其誤差累加分析。
小位移旋量理論最早是在1996年由Bourdet[1]應用到公差領域,并提出了基于SDT的幾何要素公差數學表示方法。Desrochers和Chie[2]將機器人運動學中的Jacobian模型和SDT模型相結合提出了一種Jacobian-Torsor模型。Li[3]采用SDT和誤差傳播理論進行了公差分析。胡潔[4]研究了三維公差累積運動學模型,并給出了三維公差累積的運動學模型的一般形式。吳兆強[5]研究了SDT的公差建模方法,并結合齊次坐標逐步法進行了三維公差分析。呂程[6]基于SDT的公差建模,研究了蒙特卡洛法與響應面方法相結合的公差模型求解方法。
一般來說,公差分析方法主要有極值法[7](完全互換法)、概率法(不完全互換法)[8]和蒙特卡洛法[9]三種方法。極值法和概率法用于計算復雜裝配尺寸鏈時計算效率低、工作量大,相比之下蒙特卡洛法在解決三維公差分析等復雜問題時應用更廣,且符合實際生產情況。蒙特卡洛法又被稱為統計模擬法,是一種基于概率統計理論,使用隨機數來解決很多計算問題的方法[10]。通過蒙特卡洛法可以進行由各種隨機變量組成的線性、非線性尺寸鏈計算,極大的提高了計算效率。
本文重點在基于前人的基礎上,將SDT公差參數化建模與蒙特卡洛法相結合提出了一種新的公差分析方法,并進行實例分析驗證。以槍械拋殼機構為例,采用SDT進行幾何特征表面公差參數化建模,并結合齊次坐標變換矩陣進行裝配路徑上的誤差累積分析,最后采用蒙特卡洛法在參數變動區間內進行隨機抽樣并進行計算,得到裝配精度分析模型。
1 理論分析
1.1 基于小位移旋量法的公差數學模型表達
小位移旋量法是公差分析的基礎,廣泛用于表示幾何特征面的理想形狀偏差量。在公差分析當中,裝配中單個部件的公差很可能會靜態積累,并以運動方式傳播,導致總體裝配部件的關鍵尺寸發生變化。為了更好的對幾何特面公差域進行參數化建模,采用SDT模型可以將公差表面上幾何要素的變動轉化為在公差域內隨機變動點的集合。由于SDT模型是由旋轉矢量和平動矢量組成,其部分參數取值范圍的不同,可以表現為不同的公差類型。
SDT模型由旋轉矢量R=[Δα,Δβ,Δγ]和3個平移矢量P=[Δu,Δv,Δw]描組成,SDT矩陣形式如下:
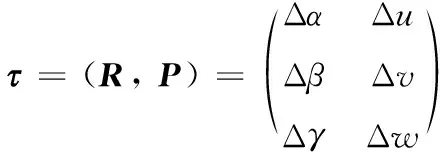
(1)
式中:Δα,Δβ,Δγ為單位旋轉矢量在局部坐標系x,y,z軸上的投影;Δu,Δv,Δw為單位平移矢量在局部坐標系軸x,y,z上的投影。
SDT矩陣向量各分量的變化,可以認為是在笛卡爾坐標系下幾何要素和幾何特征在空間上的位移變化。因此根據機器人運動學坐標變換理論[11],可以將小位移旋量轉換成齊次坐標矩陣來表示理想幾何要素中點集的空間運動,齊次坐標矩陣T為:

(2)
表1列舉了典型幾何公差的小位移旋量和齊次變換矩陣。

表1 典型幾何公差及其對應的小位移旋量和變換矩陣Table 1 Typical geometric tolerance and its corresponding small displacement screw and transformation matrix

續表(表1)
1.1.1尺寸公差參數化建模
尺寸公差的變動不影響幾何特征的形狀、位置和角度變動等,常見的尺寸公差域如下所示。圖1中左圖為線性長度尺寸公差的旋量模型可表示[0,0,0;Δu,0,0]T,右圖為直徑尺寸公差了通過小位移旋量模型表示為[0,0,0;Δu,Δv,0]T。
1.1.2幾何公差參數化建模
幾何公差中主要分為形狀公差、定向公差、位置公差和跳動公差4類[12]。其中形狀公差和位置公差應用最為廣泛。由于零件加工時不可避免地存在著誤差,其中零件表面、軸線與中心對稱平面等在加工后與所要求的理想位置和形狀之間存在著一定范圍的誤差,這種誤差被稱為形位公差。為了保證槍械零件的產品質量,需要在零件設計時需要對幾何要素規定合理的形位公差。本文以平面度和圓柱度為例進行了SDT公差參數化建模,其他類型的公差可參考類推。
1) 平面度公差域模型表達
平面度公差帶是距離為公差值的兩平行面之間區域,一般用來表示約束理想特征平面的最大偏移量。平面度公差域示意圖如圖2所示。
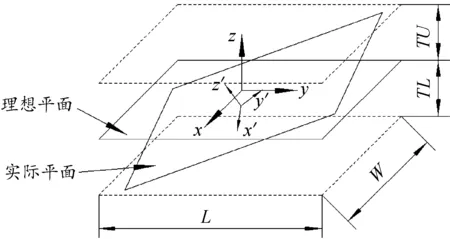
圖2 平面度公差域示意圖Fig.2 Schematic diagram of flatness tolerance area
在實際平面和理想平面建立相應的局部坐標體系。利用機器人運動學坐標變換理論,實際平面x′,y′,z′相對于理想平面x,y,z的旋轉矩陣R為:
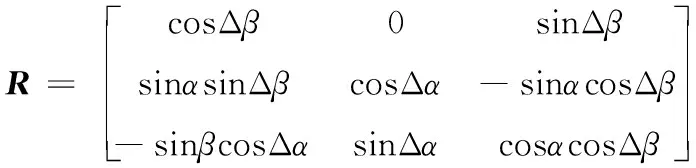
(3)
實際平面相對于理想坐標系的平移矩陣為D=[0,0,Δw]T。根據三角函數無窮小等價公式sinα≈α,cosα=1。故齊次變換矩陣模型可近似等價為:
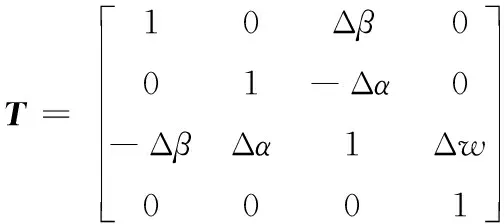
(4)
因此平面度公差域中幾何特征上任何一點A的位置描述都可以通過齊次坐標變換矩陣表示為:


(5)
其中x′,y′分別為A點相對于實際平面坐標系x′,y′,z′下的坐標,平面內點的z′=0。平面度公差模型的約束條件為:
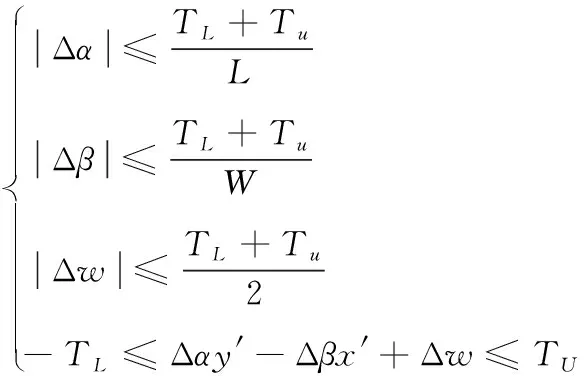
(6)
2) 圓柱度公差域模型表達
根據圓柱度公差定義,圓柱度公差域為兩同心圓柱面之間的區域,用于表示實際圓柱面與理想平面的最大偏差范圍。圓柱度公差域的示意圖如圖3所示。
圓柱實際平面相對于理想平面的位置可以分解為沿x和y軸的旋轉矢量和移動矢量。利用機器人運動學坐標變換理論,實際平面的坐標體系相對于理想平面坐標系的SDT模型表達為。


(7)
圓柱度公差域內實際幾何特征上任意一點A的SDT模型T′表示為:

(8)
旋量參數的約束條件為:

(9)
1.2 基于蒙特卡洛的SDT法累積公差分析
蒙特卡洛法公差分析是通過求解隨機變量的概率統計來計算封閉環的尺寸公差。根據已確定的幾何變動類型約束,建立基于SDT模型的幾何要素變動和約束方程,結合蒙特卡洛法篩選出符合公差邊界條件與約束條件的隨機數,采用齊次坐標變換矩陣對裝配誤差進行公差累加分析。重復試驗次數直到樣本總量,從而求出樣本均值與方差,得出測量尺寸的分布直方圖與貢獻度分析。
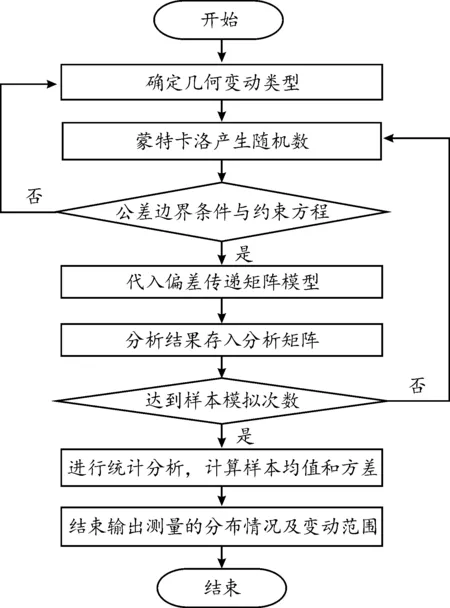
圖4 基于SDT模型和蒙特卡洛法公差分析Fig.4 Tolerance analysis based on SDT model and Monte Carlo method
2 槍械拋殼機構公差分析實例
在彈頭發射后,槍械中的拉殼鉤將彈殼從彈膛中抽出后,在拋殼挺的作用下撞擊后退的彈殼從而將其拋出,拋殼機構即將彈殼從彈膛內推出并拋出槍外的部件。為了保證彈殼被順利拋出,保證槍械機構動作的可靠性,對裝配部件的尺寸要求顯得尤為重要。本文通過控制拋殼挺與彈殼之間疊蓋量的范圍,來保證拋殼機構的可靠性。
本文中通過控制拋殼挺與彈殼之間水平方向上的疊合量需要控制在一定范圍內,來保證拋殼機構的可靠性。
拋殼機構主要由機匣體、彈殼、拉殼鉤、拋殼挺等零件組成。圖5為拋殼挺機構三維示意圖。

圖5 拋殼機構三維裝配示意圖Fig.5 3D assembly diagram of shell throwing mechanism
將機構沿彈底平面進行剖視圖分析,其中拋殼挺與彈底平面重疊的尺寸的水平距離為本次分析的目標尺寸,疊蓋量會影響裝配的質量,對槍械的可靠性有著重要的影響。圖6為拋殼機構剖視圖。拋殼機構的零件尺寸公差見表2。
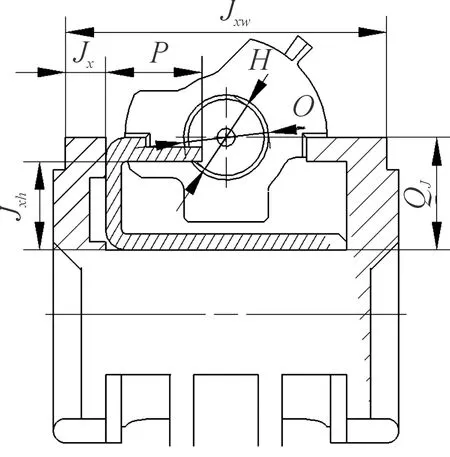
圖6 拋殼機構二維裝配示意圖Fig.6 2D assembly diagram of shell throwing mechanism

表2 拋殼機構的零件尺寸公差Table 2 Dimensional tolerance of parts of shell throwing mechanism
圖7是根據裝配約束關系建立的裝配尺寸鏈分析圖,箭頭方向表示公差傳遞的方向。

圖7 裝配尺寸鏈分析圖Fig.7 Assembly dimension chain analysis diagram
將所有組成環沿封閉環的水平方向投影:
(10)
將所有環沿豎直方向上投影:
(11)
式(10)、式(11)中封閉環X為拋殼挺與彈底平面水平方向上的疊蓋量。
2.1 極值法求解
極值法從尺寸鏈各環的最大與最小極限尺寸進行計算,不考慮各環實際尺寸的分布情況[13]。通過極值法計算出來的尺寸進行加工各組成環,不需要挑選或人工修銼便可進行裝配,且裝配后即封閉環亦能滿足裝配精度要求,實現百分百零件完全互換。
平面尺寸鏈的封閉環公等同于各組成環傳遞系數與組成環公差乘積的和,根據各組成環公差值計算結果如下:
(12)
式中:Ti為封閉環公差(其中i=1,2…,n為封閉環的個數);εi為組成環傳遞系數;
2.2 概率法求解
概率法求解封閉環公差,根據尺寸鏈中各組成環均服從于正態分布概率模型的隨機變量,且組成環之間相互獨立,在此基礎上進行公差分析。應用概率論原理的概率法求解尺寸鏈的方案更加符合實際的生產情況,并且組成環數目越多,采用概率統計法就越經濟。概率法以保證絕大多數產品可以互換,各組成環無需挑選或改變尺寸大小和位置直接進行裝配,就能達到封閉環的精度要求。
根據各組成環公差值通過概率法求解封閉環公差為:
(13)
式中:ξi為誤差傳遞系數;Ti為各組成環(其中i=1,2…,n為封閉環的個數)。
2.3 蒙特卡洛模擬法求解
2.3.1蒙特卡洛法生成隨機模擬點
蒙特卡洛公差分析[14]是基于SDT模型的幾何公差參數化建模求解出的公差邊界條件與約束方程,對公差域內的幾何特征面上模擬產生隨機點,且篩出掉不滿足邊界條件與約束方程的隨機數,并使用SDT模型表示。當產生的隨機點符合樣本量時,將生成的模擬點代入到偏差傳遞矩陣及進行下一步的計算。設產生的隨機數點為P,則P點的齊次坐標坐標變換公式為:
(14)
式中:Pi為相對于i坐標系下的相對坐標;T為小位移旋量齊次變化矩陣。
2.3.2裝配誤差累積
在計算封閉環的尺寸公差時,本文采用齊次坐標變換的方法來描述幾何特征要素在裝配體之間的累積傳遞。首先以彈底平面圓心為坐標原點建立固定坐標系,然后在每個裝配表面建立局部坐標系,幾何特征之間的誤差通過裝配表面之間的運動學關系進行誤差傳遞,如圖8所示。該機構共有9處誤差傳遞。從固定坐標系出發,沿著裝配約束經過每個裝配特征平面,最終回到固定坐標系。
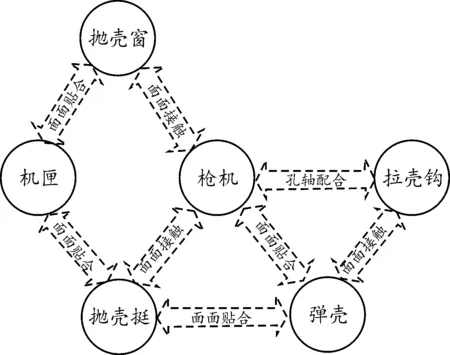
圖8 拋殼機構裝配幾何關系圖Fig.8 Geometric relation diagram of shell throwing mechanism assembly
在裝配誤差累積分析中,幾何特征要素之間誤差傳遞是基于齊次坐標變換方法描述的。齊次坐標變換矩陣是機器人運動學中用來描述2個平面相對位置的矩陣。如圖9所示,平面2相對于平面1的位置通過齊次坐標描述為:

圖9 兩平面的相對方位示意圖Fig.9 Schematic diagram of relative orientation of two planes
(15)
從固定坐標系出發,經過n個裝配幾何特征面的局部坐標系,最終回到固定坐標系,形成一個閉環回路,最終得到公差累積模型。裝配誤差傳遞如圖10所示。
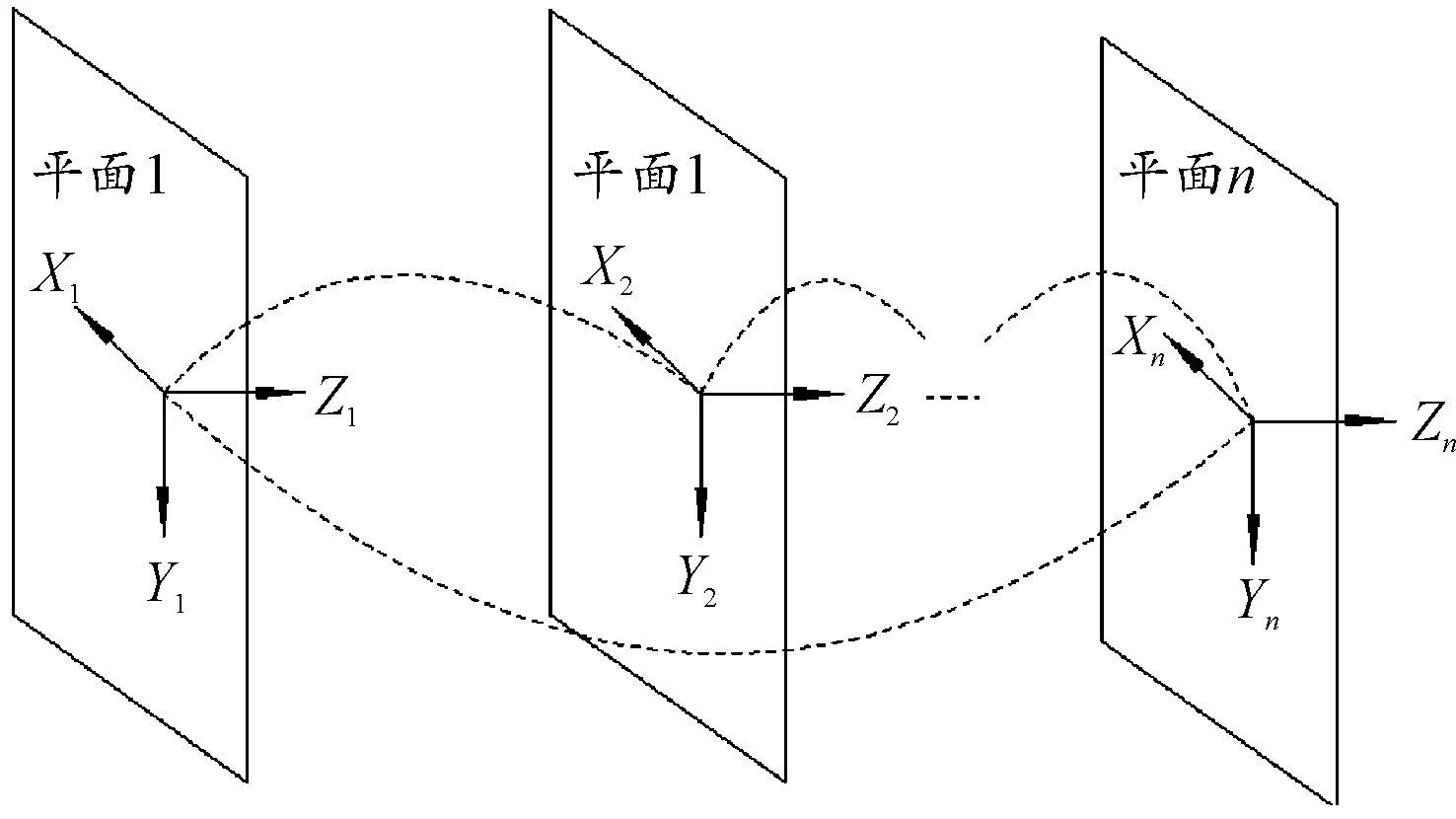
圖10 裝配體中裝配誤差傳遞示意圖Fig.10 Schematic diagram of assembly error transmission in assembly
裝配體中平面n相對于固定坐標系的誤差傳遞齊次變換矩陣nT0可表示為:
nT0=1T0·2T1… ·nTn-1
(16)
2.3.3蒙特卡洛公差分析計算
通過SDT模型對裝配體中各幾何特征表面進行參數化表達后,結合蒙特卡洛法,將包含幾何特征信息的特征面轉化公差域內的隨機點的SDT集合,并代入到誤差傳遞坐標矩陣,從局部坐標系向固定坐標系(起始坐標系)轉換,得到包含各參數的拋殼機構公差累積模型:
(17)
式中:iTi-1為平面i相對于平面i-1的齊次坐標旋量矩陣;Pi為含有旋量參數的名義尺寸誤差齊次坐標矩陣;M為固定坐標系幾何要素上任一點的坐標矩陣;X為封閉環的偏差矩陣;n為變動特征面的個數。
其中典型零部件的裝配偏差傳遞矩陣和尺寸誤差變動矩陣的主要數據如表3所示。
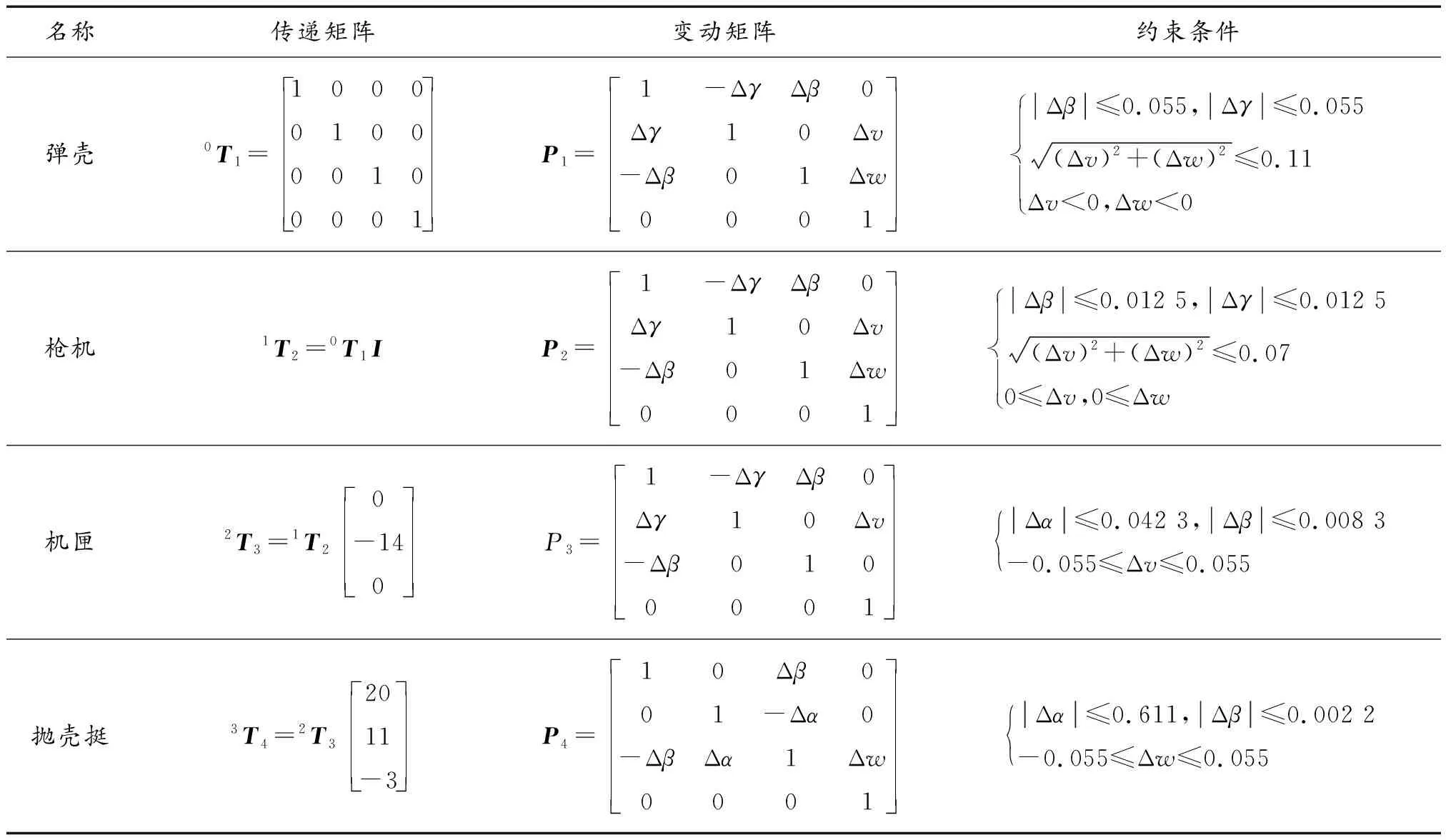
表3 裝配偏差傳遞矩陣尺寸誤差變動矩陣Table 3 Assembly deviation transfer matrix and dimensional error variation matrix
2.3.4蒙特卡洛仿真分析結果
蒙特卡洛法是基于6σ原則,即尺寸公差在μ±3σ這一范圍概率高達99.37%,我們認為在公差在這一范圍內的零件是合格的。并且組成環的數目越多,盡管尺寸公差服從于不同的分布規律,但是封閉環的誤差分布都接近于正態分布規律,且蒙特卡洛法抽樣次數越多,越接近于正態分布,結果越精確。本文通過采用2 000、5 000、10 000、20 000個樣本點進行基于蒙特卡洛抽樣法的裝配模擬仿真。疊蓋量尺寸分布直方圖如圖11—圖14所示。

圖11 模擬2 000次的疊蓋量尺寸分布直方圖Fig.11 Overlay size distribution histogram of 2 000 simulations
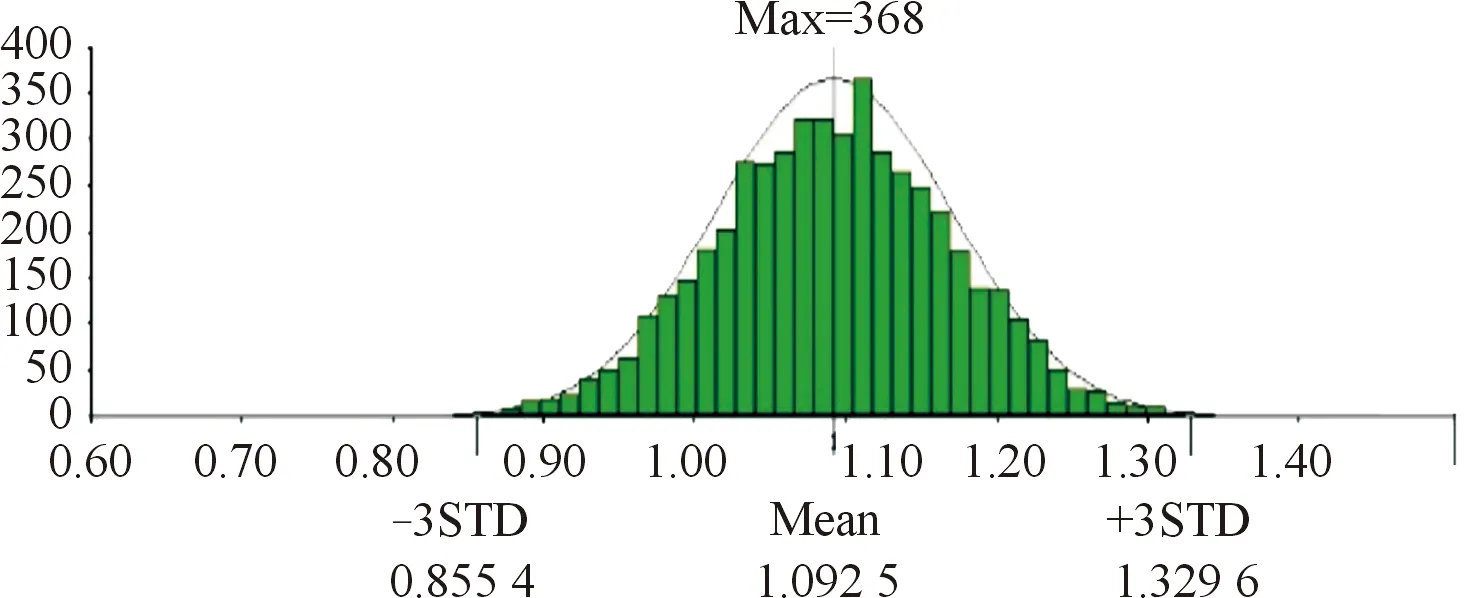
圖12 模擬5 000次的疊蓋量尺寸分布直方圖Fig.12 Overlay size distribution histogram of 5 000 simulations
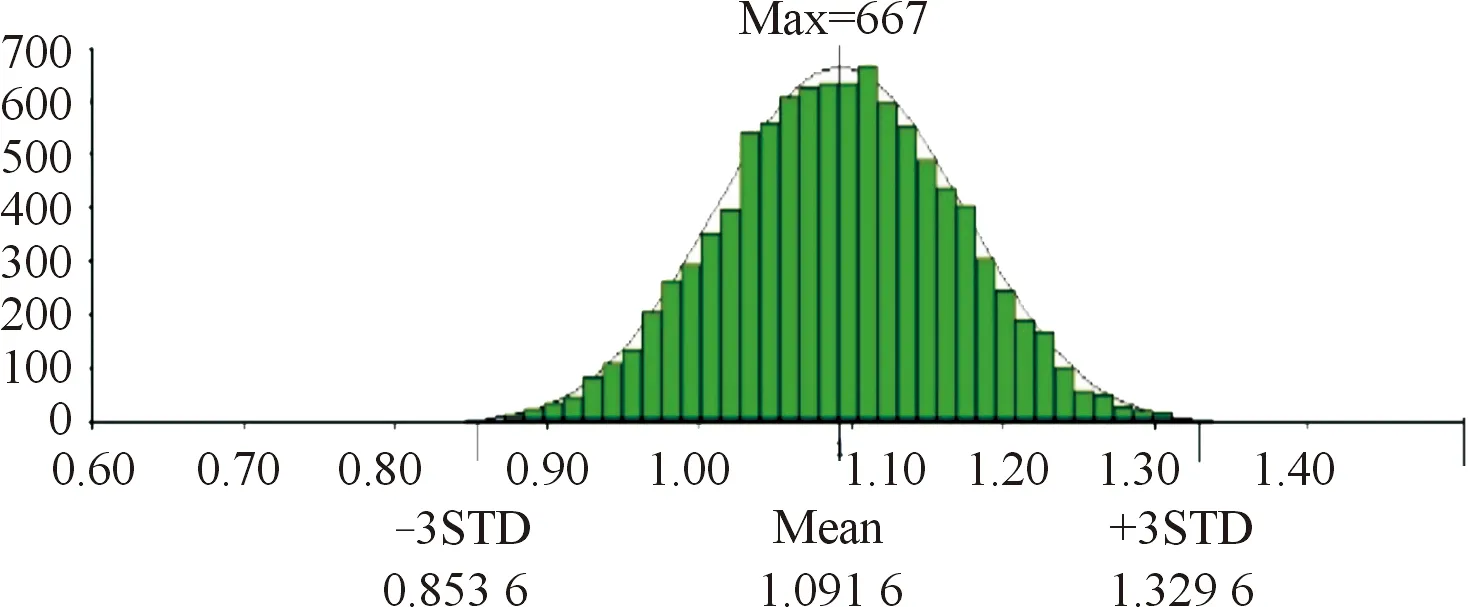
圖13 模擬10 000次的疊蓋量尺寸分布直方圖Fig.13 Overlay size distribution histogram of 10 000 simulations
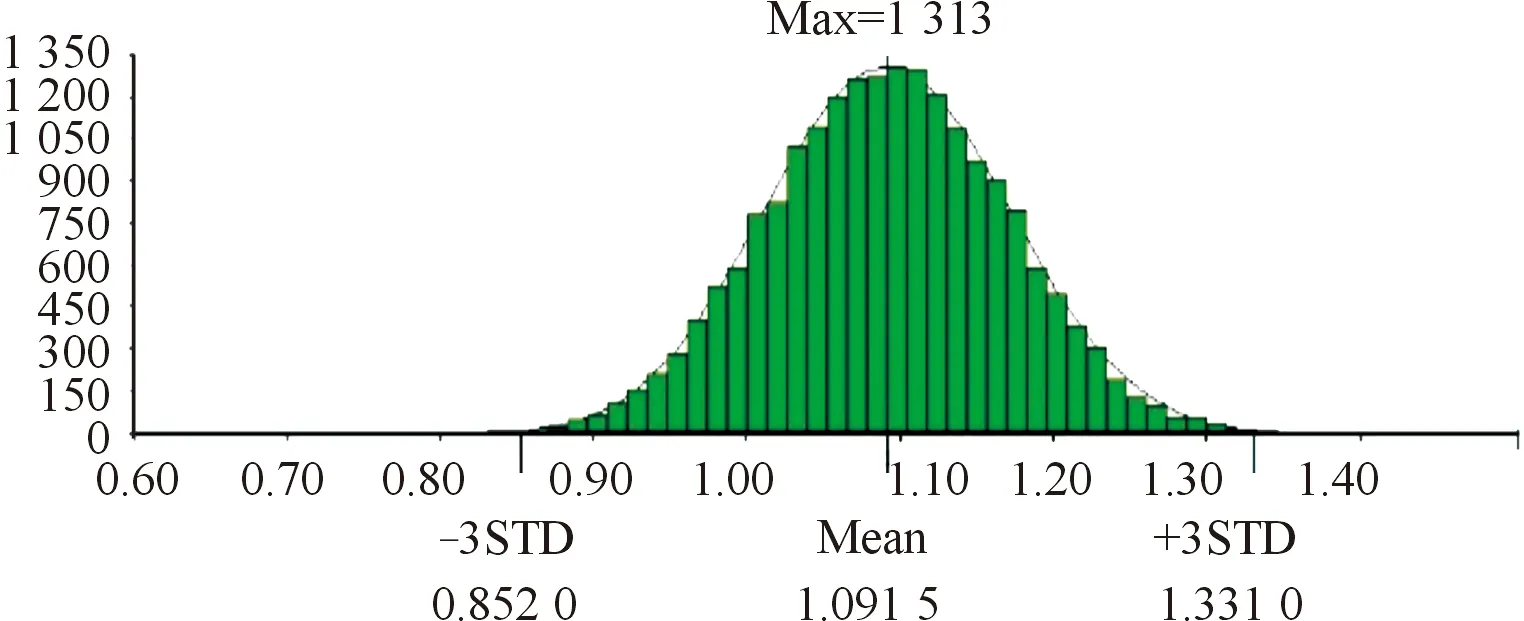
圖14 模擬20 000次的疊蓋量尺寸分布直方圖Fig.14 Overlay size distribution histogram of 20 000 simulations
2.3.5組成環貢獻度的求解
貢獻度分析[15]是求解組成環公差輸入變量對封閉環公差輸出變量的影響大小的一種方法。貢獻度分析計算采用單變量分析,首先對所有組成環變量值設為0,通過每次只變化單個組成環變量來分析目標的變化,從而確定該組成環的貢獻度大小,該方法又稱為HLM(high-low-median)貢獻度分析。
HLM貢獻度的計算方法與一階導數的泰勒級數展開式有關,設輸出參數m與輸入參數ci的函數關系為:
m=f(ci),i=1,2,…,t(t為影響因子個數)
(18)
使用泰勒級數對式(18)展開為:
(19)
式中:m0即輸出參數的名義值;Δc=ci-ci0表示輸出參數的變化量。因為HLM貢獻度分析是采用線性計算的方法,所以進行分析計算時需要將式(19)轉化為線性函數:
(20)
分析模型時需要注意以下問題:① 所有的輸入參數都應該滿足相互獨立的條件;② 輸入參數的分布規律都假設服從正態分布,則輸出參數的方差與輸入參數函數關系為:
(21)
HLM貢獻度的計算公式為:
(22)

(23)
則貢獻度公式為:
(24)
通過對封閉環的貢獻度分析,將分析結果反饋給設計人員,可對組成環的公差進行相應的公差調整。圖15為拋殼機構的貢獻度分析結果示意圖,其中封閉環精度影響因子最大的為機匣內左面與拋殼挺左側面,均為30.92%,公差值大小均為0.075。在保證精度要求的前提下,通過調整貢獻度較大的公差來最大化的降低成本,使得公差設計更加合理、有效。

圖15 各組成環公差貢獻度分析Fig.15 Tolerance contribution analysis of each component ring
3 結果對比
為了體現基于SDT模型大和蒙特卡洛法的特點和優點,分別運用極值法和概率統計法求解出疊蓋量的公差分析結果,并將三者進行數據對比分析,結果對比如表4所示。

表4 3種公差方法結果對比Table 4 Comparison of results of three tolerance methods
基于SDT模型和蒙特卡洛法的三維公差分析四次模擬仿真求解的封閉環公差值約為0.477,小于極值法計算值0.732,稍大于概率法計算值0.464,但基本與概率法保持一致,結果具有可信度。該方法隨著樣本點的增多,尺寸分布直方圖趨近于正態分布,與設計結果保持一致,在相同的尺寸公差水平下,可以根據貢獻度分析結果,對相應尺寸公差進行優化寬松,加工經濟性好,更符合實際加工生產,結果更具有可信度。該方法的應用可使槍械拋殼機構的裝配成功率和質量可靠性得到較大的提升。
4 結論
本文采用了SDT模型對某槍械中拋殼機構進行公差參數化建模,并通過齊次坐標矩陣描述裝配誤差累積模型,結合蒙特卡洛法進行三維公差分析,得出拋殼機構中疊蓋量的尺寸分布直方圖和貢獻度分析報告,并與傳統的極值法和概率法公差計算結果進行了數據對比分析,驗證了基于SDT模型和蒙特卡洛法的三維公差分析方法的有效性與精確性。
通過數據的對比可以得出,相比于傳統的極值法和概率法,基于SDT和蒙特卡洛的三維公差分析方法可以將幾何公差和尺寸公差用統一的模型來表示,且理論上其分析結果具有更高的精度,計算方便、快捷,且通過組成環貢獻度分析更有利進行公差的分配和設計。該方法的應用不僅可以簡化計算過程,而且能提高裝配成功率,提高零部件的可靠性,降低生產成本,更能適用于生產實踐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06