桓仁水庫風險源無人機遙感解譯
2023-02-16 01:49:20李崇
農業與技術 2023年3期
李 崇
(遼寧省生態環境保護科技中心,遼寧 沈陽 110161)
生命起源于水,人類擇水而居,水資源一直都是人類基礎性的自然資源和戰略性的經濟資源。無論是工農業生產、日常生活,還是國防建設、生態建設,都需要充足、優質的淡水水源。
桓仁水庫是遼寧省最大的水庫,是一座以發電為主,兼顧飲用水源、防洪灌溉、水產養殖的綜合多功能大型水庫。桓仁水庫在大伙房水庫上游,屬于大伙房水源保護區的重要部分,承擔著遼寧省12個城市2300萬人口的供水任務。因此,確保桓仁水庫水質安全有著重大的戰略意義,飲用水源風險排查正是一種有效的預防手段[1]。
對比傳統的風險源排查,無人機監測優勢明顯:直觀、可視化,無人機產生的高分辨率影像可以直觀識別污染源、污染口、可見漂浮物等,并生成分布圖,為環境評價和環境監測提供科學依據;快速高效,對于突發事件,無人機可立即對大范圍內的監控區域進行監控,單臺無人機日監控能力可達200~320元·km-2,監測結果可在短時間內生成高清影像數據、水體透明度等專題數據,為環境保護工作提供決策支持;大尺度、宏觀,無人機可實現不同高度的高空間、大區域監測,也可實現低空間、小區域監測,可同時多架次監測數萬平方公里,通過多光譜分析,還可以得到大面積的監測數據,將面積信息與傳統的點信息結合起來,從而為整個區域的宏觀環境評價提供依據。
本文通過無人機對桓仁水庫周邊風險源進行全面排查,以期及時更新風險源信息,提升水源保護區管理能力。
1 桓仁水庫概況
1.1 地理位置
桓仁水庫是遼寧省最大的水庫,在桓仁縣境內,建于1968年,坐標范圍為E125°20′~125°50′,N41°10′~41°36′,位于遼寧省東南部渾江流域中下游,橫跨遼寧、吉林2省的桓仁、通化、集安3縣轄區[2]。
1.2 水文特征
桓仁水庫為河道型大Ⅰ型水庫,主要功能為蓄水與發電,兼顧灌溉、防洪、養魚。水庫全長81km,水深10~15m,控制流域面積10400km2,總庫容量34.6億m3。桓仁水庫中水的來源主要為渾江,其它還有新開河、富爾江等7條河流。集水區年平均降水量895mm,年平均流量45.4×108m3。水庫水體年平均溫度10.8℃,封冰期4個月。水庫含沙量低,平均含沙量為0.71kg·m-3[3,4]。
2 航拍平臺及參數
2.1 航拍平臺
航拍平臺采用成都縱橫CW-15垂直起降型無人機,見圖1。CW-15純電動垂直起降固定翼無人機系統,垂直起降、全自主飛行,操作簡單;可配置多個任務模塊艙,根據實際需求任務載荷等;機身結構高度模塊化,各連接結構全部采用快鎖裝置;旋翼機臂采用折疊設計,無需拆卸,電氣和機械連接一次同步,進一步提高可靠性和便捷性。
2.2 性能特點
2.2.1 一機多用
一個飛行平臺可配置多個任務模塊艙,根據任務需求更換正射相機、五拼傾斜攝影相機、多光譜、高光譜、航磁、光電吊艙與圖傳等,方便輸出多種數據成果,且能節約新增飛行平臺費用。

圖1 CW-15無人機
2.2.2 長航時
搭載正射或傾斜設備,最高航時達到160min。
2.2.3 高原性能
可在4500m海拔正常起飛,巡航高度可達6500m。
2.2.4 大載重
最大任務載荷能力高達2.5kg。
2.2.5 折疊機臂
旋翼機臂無需拆卸,通過折疊設計,進一步提高可靠性和便捷性。
2.2.6 垂直起降
大大減小對場地、彈射架、降落傘等依賴,作業場地適應廣。
2.2.7 全自主起飛
無需遙控器,一鍵起降,安全簡便,降落精度10cm以內。
2.2.8 RTK/PPK
標配實時差分和事后差分2種模式同時使用,實時差分主要用于厘米級精準自主垂直降落,后期差分主要用于輸出高精度POS數據,確保減少50%~80%像控點。
2.2.9 效率高
最大作業續航時間可達2.5h,單架次可以完成6km2以上(1∶500比例尺);10~15km2(1∶1000比例尺);20~25km2(1∶2000比例尺)航測任務。
2.2.10 姿態好
氣動設計通過嚴格的風洞實驗,飛行控制采用總能量自適應算法,確保姿態穩定,方便生成DLG成果。
2.2.11 曝光同步
曝光同步模塊確保曝光延時控制在10ms以內。
2.2.12 模塊化設計
使用插銷、卡扣、自鎖裝置,無需任何工具即可完成無人機拆裝。
2.2.13 雙GPS多冗余設計
確保飛行過程中若主差分GPS出現異常可以平滑切換到備份GPS,保障飛行安全。
2.2.14 雙磁羅盤多冗余設計
確保飛行過程中若內置磁羅盤出現異常可以平滑切換到備份外置磁羅盤,保障飛行安全。CW-15具體相關參數見表1。
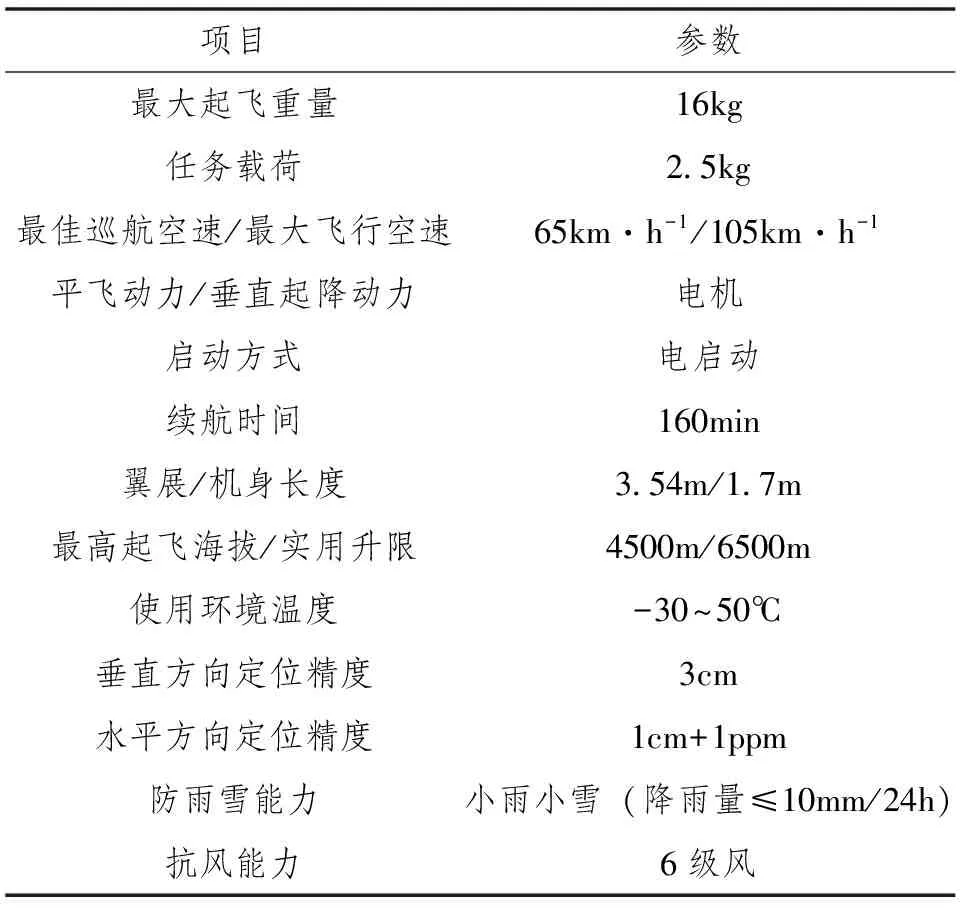
表1 無人機參數
2.3 航拍參數
航拍時間2021年10月19—23日,飛行高度950m。利用武漢航天遠景公司攝影測量軟件進行影像拼接與處理,生成保護區的正射影像。
3 疑似風險源遙感解譯
3.1 風險源分類
根據實際工作需要,風險源具體分為工業企業、畜禽養殖、污水處理廠、加油站、醫療院所、橋梁、垃圾填埋場、采礦企業和其它。
3.2 解譯過程
采用目視解譯方式,即使用眼睛目視觀察,憑借解譯人員的知識、經驗和掌握的相關資料,通過大腦分析、推理和判斷,提取有用的信息。具體步驟:將已有風險源數據和航拍正射影像疊加;參考風險源目標處影像的位置、布局、顏色、色調、大小、形狀、陰影、紋理、圖案等信息,建立目標水源地風險源解譯標志;完成整個區域風險源解譯。通過遙感解譯提取桓仁水庫內風險源圖斑,利用航拍影像和衛星影像解譯桓仁水庫的疑似風險源。
3.3 解譯結果
桓仁水庫疑似風險源清單具體見表2。

表2 桓仁水庫疑似風險源清單

續表 桓仁水庫疑似風險源清單
根據表2可以看出,桓仁水庫周邊疑似風險源共68個,全部為小型養殖企業和工業企業。風險源示意分布情況和詳情見圖2、圖3。
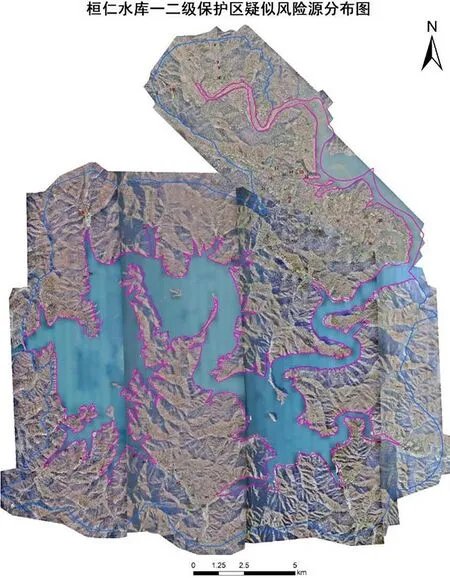
圖2 桓仁水庫疑似風險源示意圖

圖3 桓仁水庫疑似風險源詳圖舉例
4 總結
本文利用無人機遙感對桓仁水庫周邊所有疑似潛在風險源進行了初級篩查,列出風險源清單,疑似風險源共68個,主要為小型養殖企業和工業企業。今后應按照實地調研等方式,進一步明確和完善養殖企業和工業企業的種類、運行狀態、產污類別、排污量和排污去處等信息。風險源排查大大縮短了時間成本,進一步證明了無人機監測的可行性,為將來水環境風險常規監測提供了新的技術手段。
