公里級背景數據采集及偽裝特征提取方法
2023-02-11 03:52:50許衛東郝有斌劉朝暢
兵器裝備工程學報 2023年1期
楊 鑫,許衛東,郝有斌,劉朝暢
(陸軍工程大學 野戰工程學院,南京 210007)
1 引言
迷彩技術對于移動目標具有非常重要的作用。迷彩設計通常包含3個流程。即:背景采集—特征提取—圖案設計。背景采集是偽裝設計的首要步驟,對偽裝的最終效果具有決定性作用。傳統方法以地面采樣為主。在主要活動區域確定背景抽樣點后,通過地面測色儀器或者光譜儀獲取背景顏色數據。因此,地面采樣僅能采樣單個點的顏色樣本。采用空中正射投影成像的采樣方法一定程度上能夠克服這些問題。GJB7959—2012[1]中規范了地面迷彩偽裝背景的空中采樣方法。固定目標的有效背景是9倍的目標投影面積范圍,因此通過小范圍空中成像容易獲取背景數據。
對比于固定目標而言,“公里級背景”一般指運動目標所涉及的背景區域。公里級背景指面積在1 km2以上的背景。由于整體背景范圍較大,快速獲得整體背景分布存在一定的難度。從目前的技術途徑來看,可以考慮用以下3種方式實現。一是分析衛星數據,包括高光譜數據和可見光數據,通過像元分類或人工區域劃分獲取整個背景的整體特征。衛星圖片的人工區域劃分的優點是快速,但缺點是精準度較低、色差大。另一方面,實時的衛星數據通常難以獲得。二是根據所要偽裝的目標任務和本次偽裝所針對的作戰行動,有選擇的劃定部分采樣區域,以壓縮采樣范圍。如后勤運輸車輛目標主要的運動范圍是黃土路背景和水泥路、柏油路背景。道路背景類型單一,可直接確定采樣范圍完成采樣任務。三是通過低分辨率無人機采樣。由于第一、二種方式處理方法不具有通用性,針對這無人機采樣方法展開研究。
另一方面,由于數據量過大,基于成像的采樣方法無法做到全部采樣并處理全部數據。以20 km×15 km范圍的背景為例,以0.1 m分辨率全采的情況下圖像像素量將超過300億。以現有的成像設備估算2 000萬像素圖像為20 MB數據,則全部采樣將達到30 GB的數據量。而應用于運動目標的變形迷彩適用范圍通常遠超過這一面積。因此,文中通過抽樣的方法解決這一問題。
特征提取通常根據圖像分割獲取具有不同特性的背景斑塊。提取背景的主色和斑點形狀特征,為偽裝設計提供技術支撐。目前的研究主要以主色分析為基點,通過圖像聚類實現主色和斑點特征提取。馬棟良等[2]研究了基于模糊聚類的迷彩斑點提取算法。吳凡等[3]分析了FCM聚類算法和分水嶺算法的分割效果。張勇等[4]在Lab顏色空間中選擇色差盡可能大的標準偽裝色作為初始聚類中心,由最小色差原則和相鄰元素特征共同決定目標像素歸屬,采用K均值聚類算法選取迷彩偽裝色。喻均等[5]對比了SOFM算法和均值聚類算法的背景特征提取效果,結果表明SOFM方法能更好地保留細節紋理。Liu等[6]為了提高效率,將圖像像素從聚類樣本空間映射到量化顏色空間,采用改進的模糊聚類算法獲取背景主色。
綜上,背景采樣和特征提取過程存在以下不足。一是傳統背景采集和偽裝特征提取方法無法適用于移動目標的背景。二是基于像素點顏色的直接聚類的方法使圖像分割的粒度太小,難以有效應用于圖案設計。
因此,針對公里級范圍背景采樣問題,基于系統抽樣法提出了兩級采樣流程。然后提出了三種特征組合的區域特征描述方法。最后通過超像素分割聚類得到背景的區域的特征劃分。
2 公里級范圍背景數據采樣
2.1 基于兩級采樣的背景數據采集
兩級采樣思路如下:第一級采樣通過系統抽樣法,得到背景區域的小規模抽樣數據集,分析該數據集獲取背景中地物和地貌的分布和比例狀況,然后再進行有針對的二次采樣,獲得背景中地物和地貌的具體紋理、主色以及斑點等具體特征[7]。
s=A(?x2m」, ?y2n」)
(1)
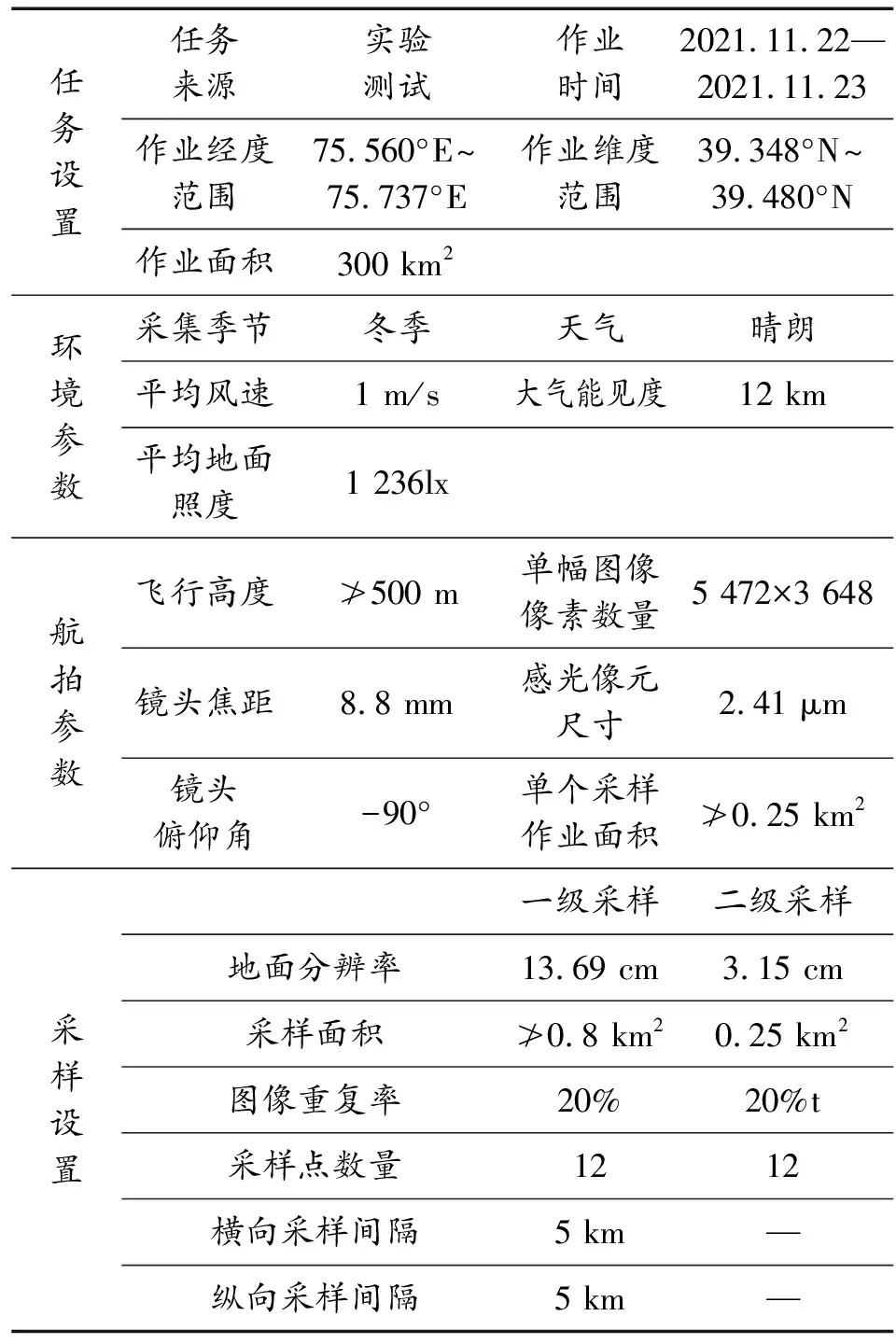
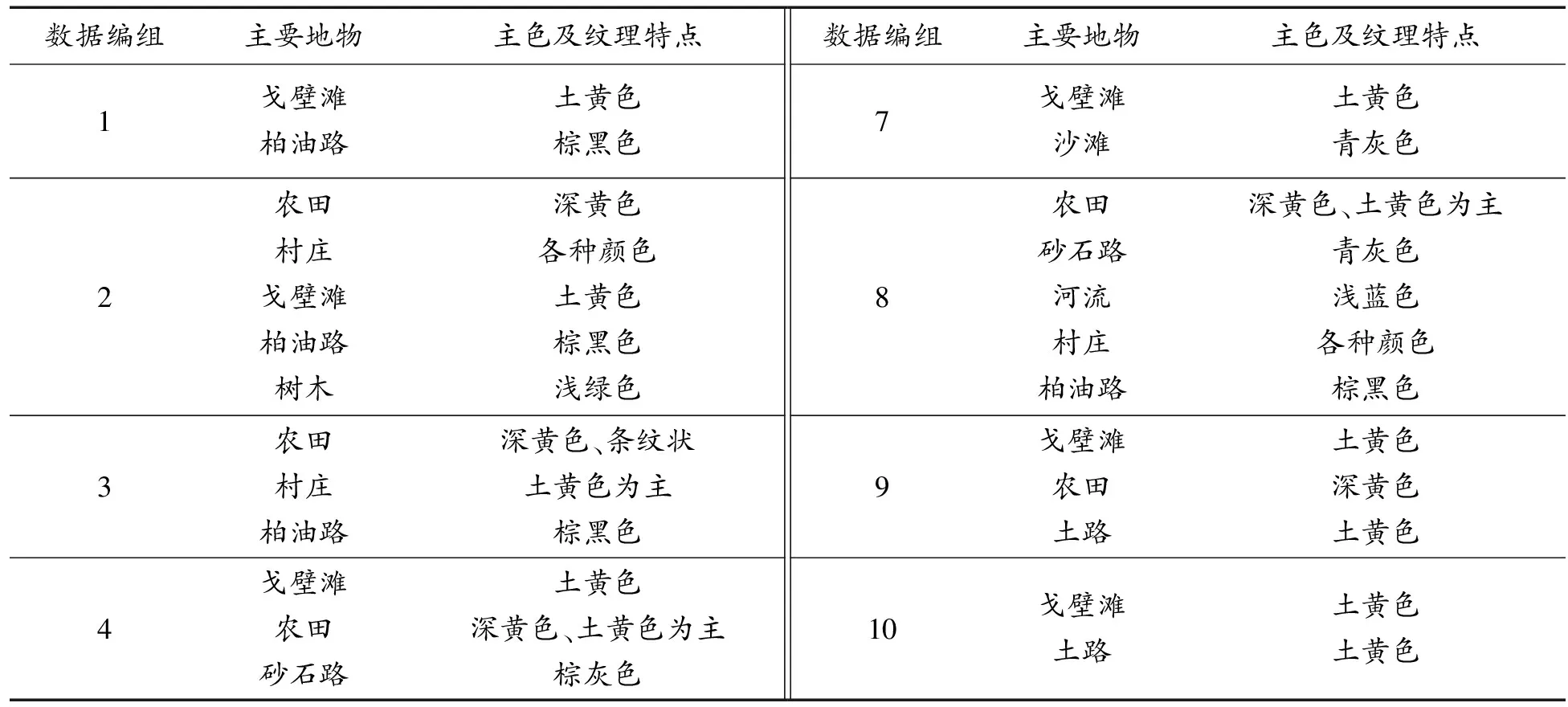
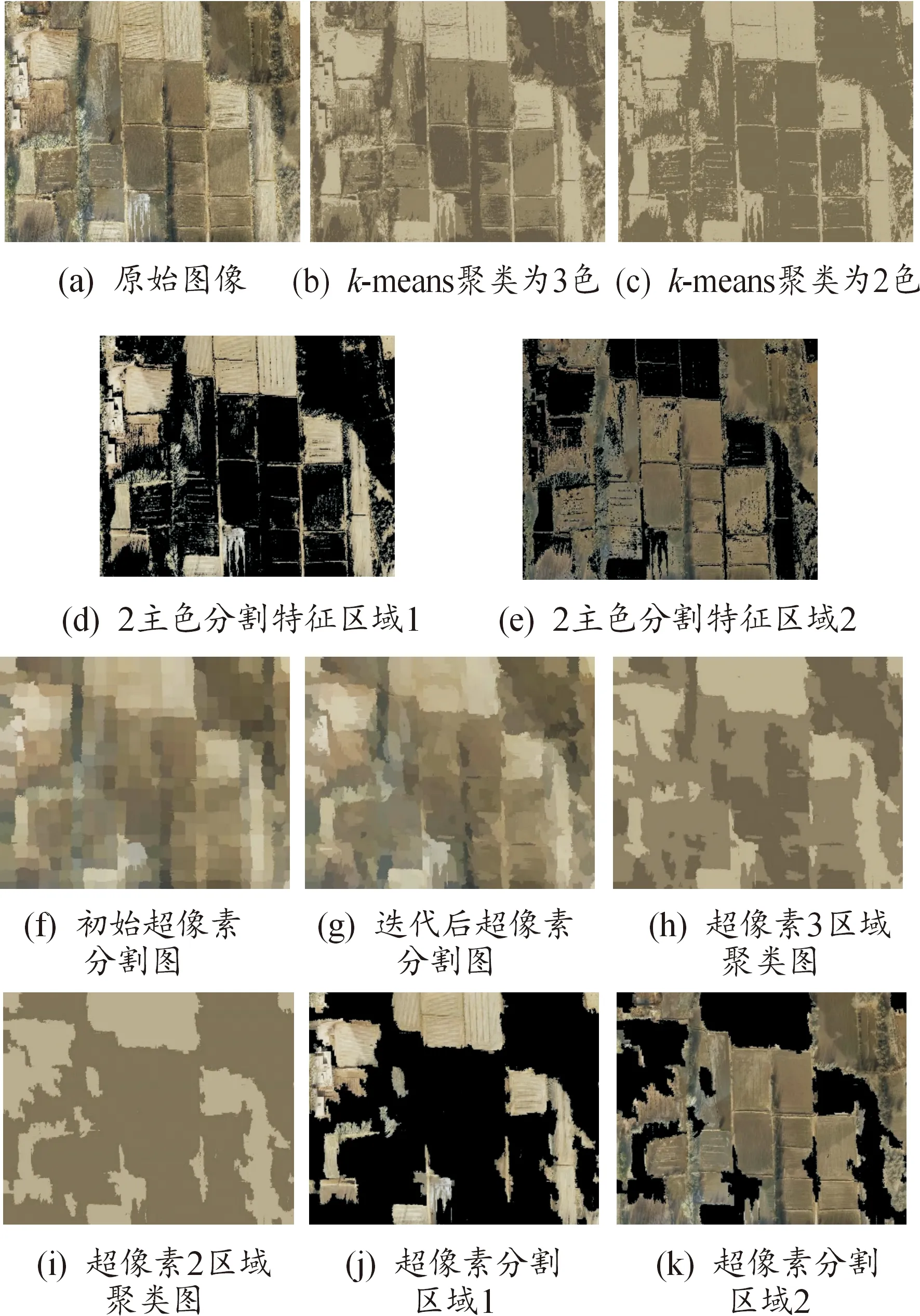
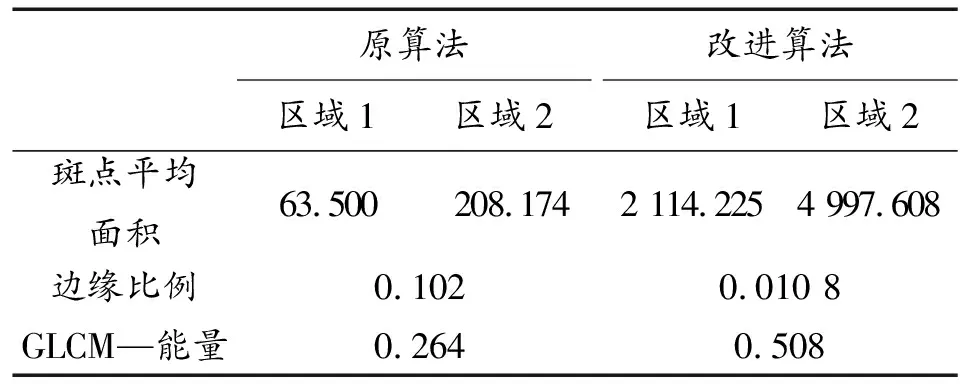
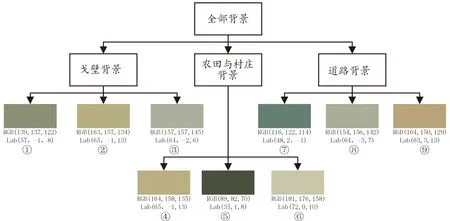
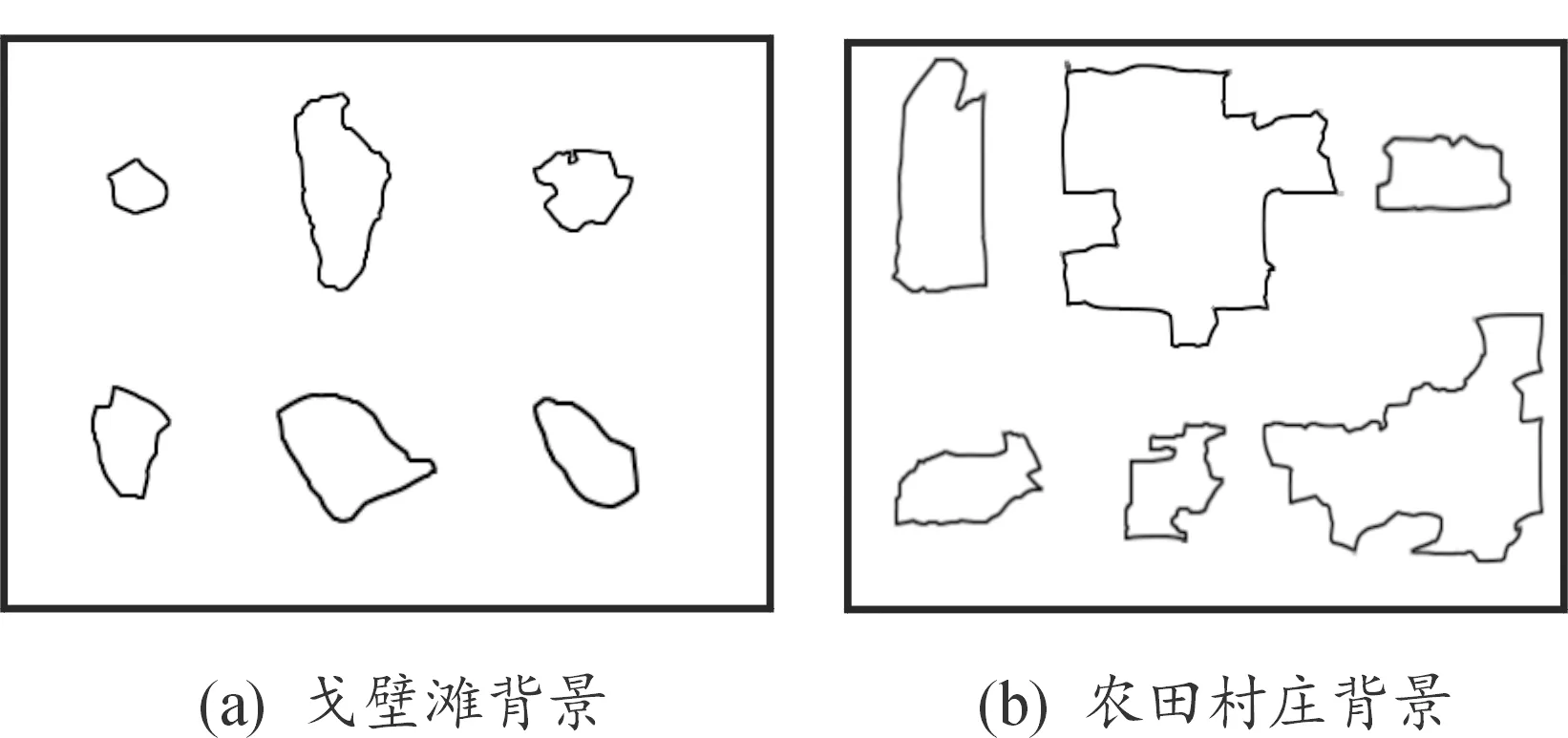
max(R)·z (2) 上述方法中,需要確定的參數為背景采樣間隔m、n,采樣面積p1、p2以及感興趣度向量R。當采樣間隔數量越多時,第一級采樣任務量越大,但同時對于背景類型的分布感知也越精準。因此,應當盡可能提升飛行器高度,擴大成像設備視場。確定采樣點數量和任務時間要求后,一級采樣面積p1應當設置盡可能大以確保采樣面能夠涵蓋不同類型的背景大斑塊,進而確定分布狀況。為了機動目標的偽裝的需求,二級采樣面積應當不小于典型地物和地貌的最小面積。感興趣度R表示采樣時對不同背景類型的重要性傾向程度。此外,若一級采樣點采集的背景中包含2種以上重要背景類型,可多次構建對應的Ai、Ri,i=1,2,…,e實施二級采樣。若所構建的Ri滿足約束條件(式(3)),可將該采樣點各背景的最大感興趣度作為rs: (3) 采樣整體流程總結如圖1所示,其中藍色框圖代表輸入參數,綠色框圖表示算法輸出結果。 圖1 兩級背景數據采樣方法流程圖 對采集到的多幅圖像拼接合成,能夠得到大場景的背景圖像數據并去除圖像的重疊區域。圖像的拼接合成通常包括特征點描述、變換矩陣構建和重復部分融合3個步驟。采用SURF[8-9]特征點描述方法構建特征集。為了提高算法效率,根據采樣重復率,計算重復區域的特征點以提高算法效率[10]。采用RNASC算法[11]構建配對特征點的變換矩陣,以剔除誤匹配點。由于采樣在同一時段進行,可認定環境的亮度變化較小。因此采用平均融合法對重復部分進行融合,以提高計算效率。 (4) 設背景圖像像素為u×v,將圖像顏色空間轉換至CIELab均勻顏色空間,像素點的顏色采用[Lij,aij,bij](1≤i≤u,1≤j≤v)表示。因此任意兩像素k,t之間色差可表示為 (5) (6) (7) (8) (9) 此外,像素間的歐氏距離可以表示為 (10) 兩像素k,t之間的綜合特征差異可度量為 Dr,t=dlab(r,t)+αwdw(r,t)+αxydxy(r,t) (11) 超像素是指具有相似紋理、顏色、亮度等特征值的圖像塊,這一概念由Ren等[15]于2003年提出。在背景分割時,將與目標面積大小相當的背景圖像塊設定為超像素有助于防止圖像過分割,同時減少算法復雜度。本文在特征描述的基礎上,采用SLIC[16-17](simple linear iterative clustering)算法實現背景超像素分割。 為了驗證兩級采樣方法的有效性,實驗采集了某地15 km×20 km大小區域的背景,采樣過程數據記錄如表1所示。一級采樣共計采樣了12個位置,每組作業之間間隔 5 km,采樣地理坐標經度范圍為75.560°E~75.737°E,緯度范圍為39.348°N~39.480°N。一級采樣單個作業點面積不小于0.8 km2,每次成像時橫向和縱向圖像重疊率設置為20%。使用的無人機型號為大疆精靈4RTK,單幅圖像像素量為 5 472×3 648。 表1 背景采樣記錄表 采樣的位置顯示在電子地圖上的結果如圖2所示,采樣編號的順序是優先從左至右,其次從上到下。需要注意的是,由于圖2中紅色框圖標定的采樣點為山區無人區,作業開展困難;另一方面作戰時武器裝備大概率不會抵達該區域,因此為了方便作業,采樣的位置進行了相應的修訂(紅色箭頭指示)。圖2中的白色圓圈為無人機成像點位。采樣時能見度為12 km,成像條件較好。通過拼接與合成,得到的一級采樣結果如圖3所示。 圖2 一級采樣無人機成像位置示意圖 分析每個數據編組中圖像數據,可以確定該15 km×20 km地域基本包含戈壁灘、柏油路、農田、村莊、樹木、砂石路、土路、河流和沙灘等地物和地貌,每組圖像數據中包含的地物見表2。部分地物與地貌的主色和紋理特點是基本一致的,因此在確定主色種類數量時可以考慮將類型一致的背景進行合并。下面通過分割與聚類獲得具體占比,再結合任務屬性和偽裝系統特性確定主色種類數量。 表2 各組圖像數據中主要地貌及其特征分析 經過手動對采樣數據的估算可知,該區域背景中的戈壁灘占比64.3%,主要存在于1,4,5,7,9,10,11,12號區域內。農田和村莊占比26.1%,主要存在于2,3,4,8號區域內。河流與沙灘背景占比5.5%,主要存在于6號區域內。道路背景(包含土路、砂石路、柏油路)占比4.1%,主要存在于1,2,3,4,5,6,8,9,10號區域內。其占比見圖4所示的餅狀圖。另外,樹木等林地背景占比基本可以忽略不計,不納入考慮范圍。將農田與村莊一起納入同一背景的原因是一方面村莊與農田背景總是相連接,另一方面村莊背景色差和紋理隨機特性較大。各個類型地物背景占比如圖4所示。 圖4 背景中主要地物類型占比 得到背景類型的基本分布后展開二級采樣作業。根據戈壁灘、村莊農田、河流沙灘和道路的次序確定矩陣A和感興趣度向量R。由于河流和沙灘等區域在作戰時人員和武器裝備基本不會接觸,因此感興趣度設定為0。戈壁灘背景類型相對單一,感興趣度設定為0.1,道路為機動目標主要接觸背景,感興趣度設定為0.6,農田和村莊背景感興趣度為0.3。二級采樣總采樣次數w=12。根據以上條件實施作業點采樣,最終確定采集戈壁灘數據3組,農田和村莊背景3組,道路背景6組。 以圖5(a)所示的農田背景為例,研究基于超像素分割特征提取算法的效能。圖5(b)、圖5(c)中分別展示了原始k-means聚類算法主色參數設定為2和3所生成的結果;綜合考慮此農田背景的特點,更適合于分割為2類斑點。將劃分為2塊區域的背景單獨分割出來(見圖5(d)和圖5(e))。圖5(f)、圖5(g)分別為初始超像素分割圖和聚類后的超像素分割圖。圖5(h)、圖5(i)中分別展示了超像素分割算法分割區域參數設定為2和3生成的結果。為了對比形成的結果,將劃分為2塊區域的背景單獨分割出來(見圖5(j)和圖5(k))。 圖5 基于k-means與超像素分割的背景特征提取效果對比 根據分割后結果可以直觀得出:原k-means分割出的背景具有較多的噪點,不利于后續處理,但可以將背景顯著劃分為亮色區域和暗色區域。而基于超像素分割的背景劃分算法獲得的背景劃分要比前者完整,且劃分后的背景特征差異明顯。通過邊緣比率、斑點平均面積和灰度共生矩陣的能量[20]驗證算法的改進效果。斑點平均面積越大表明分割的完整性越高。邊緣比例計算了圖像輪廓占據總像素的數量,值越小表明分割的完整性越好。灰度共生矩陣(GLCM)的能量值是像素分布的一致性統計量,一定程度上,能量值越大反映紋理模式越簡單,分割的完整性越好。表3展示了計算結果,3個指標均表明改進超像素分割的完整性優于原k-means算法。 表3 改進算法的圖像分割效果計算對比 由此可以看出,基于超像素分割算法對于紋理復雜的背景更加適用,且能夠更好的適應圖像噪聲。此外,圖5(f)和圖5(g)對比結果可以看出,簡單線性迭代過程能夠使輪廓分割的更加精確,以減少分割誤差。 算法運行耗時方面,超像素分割主要耗時在于前期的簡單線性迭代過程。在相同測試條件下經過20次實驗統計,超像素聚類比單純的k-means算法平均聚類耗時快35.4倍。因此,可以通過設置迭代次數在分割精度和運算時間之間取得平衡。 對采集到的3種背景圖像進行超像素分割和聚類,得到了顏色和斑點形狀特征,結果分別見圖6和圖7。通過聚類共提取了9種主色(圖6),由于②和④、③和⑧色差較小,因此合并后,可得到7種主色。 圖6 3種類型背景的主色提取結果 圖7 提取2種背景下的斑點形狀特征 另一方面,道路背景幾乎為純色背景,無法提取到斑點。戈壁灘背景中的斑點大多為灌木植物輪廓所形成,形狀趨近于橢圓形。農田村莊背景中有人工干預,因此形成的斑點形狀多有直線和直角等特點。上述結果表明:由于地域廣闊帶來的紋理和斑點形狀多樣性,僅采用一種偽裝圖案(如變形迷彩)很難適用于大范圍的背景(公里級背景)。采集得到的主色特征和斑點特征后為機動目標偽裝設計提供基本依據。 1)基于系統抽樣方法,研究了公里級背景兩級采樣方法與流程。兩級采樣方法能夠克服地面采樣不準確和全部采樣數據量大的問題,該方法為大范圍背景下迷彩圖案設計提供技術支撐。 2)改進了傳統基于主色的背景聚類和特征提取算法,綜合紋理、距離和顏色特征,提出了基于SLIC的背景超像素聚類分割方法。 3)采樣了某地20 km×15 km范圍背景,并測試了改進聚類算法的性能。結果表明,上述采集方法能夠準確有效地采集大范圍背景;所提出的算法能夠優化分割區域的完整性和整體性,通過參數調節在聚類精度和運算效率間取得平衡。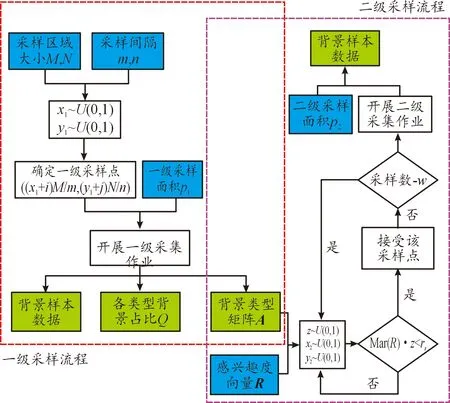
2.2 快速背景圖像拼接優化
3 結合紋理與顏色的偽裝特征提取
3.1 特征描述與差異度量

3.2 超像素分割
3.3 聚類分析
4 實驗與結果分析
4.1 背景一級采樣

4.2 背景特性分析與二級采樣

4.3 特征提取算法效能分析
4.4 偽裝特征提取
5 結論
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
電子制作(2019年15期)2019-08-27 01:12:00
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
民生周刊(2012年10期)2012-10-14 09:06:46
