固液捆綁火箭發(fā)動(dòng)機(jī)健康診斷技術(shù)
2022-12-03 16:37:56楊欣茹王猛高莉辛高波孫平黨鋒剛
上海航天 2022年5期
關(guān)鍵詞:發(fā)動(dòng)機(jī)故障
楊欣茹,王猛,高莉,辛高波,孫平,黨鋒剛
(1.上海宇航系統(tǒng)工程研究所,上海 201109;2.上海航天技術(shù)研究院,上海 201109;3.西安航天動(dòng)力研究所,陜西 西安 710100)
0 引言
液體火箭發(fā)動(dòng)機(jī)健康診斷技術(shù)是提高運(yùn)載火箭發(fā)射可靠、安全的關(guān)鍵技術(shù)之一,近年來一直受到各航天大國的高度重視。
美國的液體火箭發(fā)動(dòng)機(jī)故障監(jiān)測系統(tǒng)以航天飛機(jī)主發(fā)動(dòng)機(jī)(Space Shuttle Main Engine,SSME)應(yīng)用為代表,從20 世紀(jì)70 年代簡單的紅線關(guān)機(jī)系統(tǒng)逐漸向集成化、平臺(tái)化的趨勢(shì)發(fā)展[1-4]。2004 年設(shè)計(jì)的先進(jìn)健康管理系統(tǒng)通過箭載健康管理計(jì)算機(jī)形成了實(shí)時(shí)振動(dòng)監(jiān)控、光學(xué)羽流異常監(jiān)測和基于線性發(fā)動(dòng)機(jī)模型監(jiān)測的3 個(gè)實(shí)時(shí)故障監(jiān)測子系統(tǒng)[5-6],有效提高了SSME 在發(fā)射、升空階段的可靠性和安全性。近年來,美國在空間運(yùn)載計(jì)劃和集成空間運(yùn)輸計(jì)劃指導(dǎo)下,相繼進(jìn)行了多個(gè)先進(jìn)健康監(jiān)控或健康管理系統(tǒng)的研發(fā),包括火箭發(fā)動(dòng)機(jī)健康管理系統(tǒng)、集成健康監(jiān)控系統(tǒng)、智能集成管理系統(tǒng)等多種系統(tǒng)框架或方案[7-8]。美國的火箭發(fā)射系統(tǒng)大多配備牽制釋放系統(tǒng),液體火箭發(fā)動(dòng)機(jī)的健康檢測也得到了廣泛應(yīng)用。如獵鷹9 號(hào)火箭,其一級(jí)使用9 臺(tái)Merlin 液氧煤油發(fā)動(dòng)機(jī),發(fā)射期間一級(jí)在發(fā)動(dòng)機(jī)點(diǎn)火后仍系留于地面,自動(dòng)檢測系統(tǒng)確認(rèn)發(fā)動(dòng)機(jī)工況,若檢測到任何異常將執(zhí)行自動(dòng)安全關(guān)機(jī),大幅減小了發(fā)動(dòng)機(jī)起動(dòng)失敗和性能不足的風(fēng)險(xiǎn)。俄羅斯火箭發(fā)動(dòng)機(jī)研制過程中研發(fā)了故障監(jiān)測系統(tǒng)[9-10]。以RD-180 火箭發(fā)動(dòng)機(jī)為例,故障監(jiān)測系統(tǒng)在發(fā)動(dòng)機(jī)起動(dòng)前、起動(dòng)過程和主級(jí)工作中均進(jìn)行監(jiān)測;起動(dòng)前監(jiān)測流量調(diào)節(jié)器和燃料節(jié)流閥傳動(dòng)軸初始和最終狀態(tài)、燃料隔離閥蝶盤狀態(tài);起動(dòng)過程中監(jiān)測起動(dòng)箱增壓氣路、推力室燃料閥打開控制氣路壓力信號(hào)計(jì)、渦輪泵轉(zhuǎn)速;主級(jí)工作過程中監(jiān)測渦輪泵轉(zhuǎn)速和燃料預(yù)壓泵轉(zhuǎn)速、氧化劑泵轉(zhuǎn)子軸向位移、主渦輪出口燃?xì)鉁囟取D-180 火箭發(fā)動(dòng)機(jī)采用分級(jí)起動(dòng)方式,初級(jí)工況監(jiān)測正常后才繼續(xù)起動(dòng)和發(fā)射流程。
我國對(duì)液體火箭發(fā)動(dòng)機(jī)健康監(jiān)控系統(tǒng)的研究多集中于地面試車及地面仿真[11-19],目前國內(nèi)尚無在火箭發(fā)射中應(yīng)用發(fā)動(dòng)機(jī)健康診斷系統(tǒng)的先例。2002 年,西北工業(yè)大學(xué)于瀟等[11]研制了一種液體火箭發(fā)動(dòng)機(jī)渦輪泵狀態(tài)監(jiān)測與故障診斷系統(tǒng),并通過了2 次發(fā)動(dòng)機(jī)熱試車考核。2008 年,西安航天動(dòng)力研究所馬紅宇等[14]設(shè)計(jì)了液氧煤油高壓補(bǔ)燃發(fā)動(dòng)機(jī)地面試車故障監(jiān)控系統(tǒng)。2019 年,西北工業(yè)大學(xué)趙萬里等[18]提出了一種遞歸結(jié)構(gòu)識(shí)別(Recursive Structure Identification,RESID)算法用于液體火箭發(fā)動(dòng)機(jī)故障診斷。此外,國防科學(xué)技術(shù)大學(xué)針對(duì)新一代大推力液體火箭發(fā)動(dòng)機(jī)設(shè)計(jì)開發(fā)了地面試車故障實(shí)時(shí)檢測與診斷系統(tǒng)[20-21],并多次通過了地面熱試車的考核。2022 年CZ-6A 運(yùn)載火箭作為我國新一代固液捆綁火箭,在國內(nèi)火箭運(yùn)載領(lǐng)域率先采用了箭上液體發(fā)動(dòng)機(jī)健康診斷技術(shù),并圓滿完成了首次飛行試驗(yàn)任務(wù),標(biāo)志著國內(nèi)運(yùn)載火箭箭上液體發(fā)動(dòng)機(jī)健康診斷技術(shù)取得重大突破。
1 發(fā)動(dòng)機(jī)健康診斷方案設(shè)計(jì)與實(shí)現(xiàn)
1.1 總體點(diǎn)火時(shí)序設(shè)計(jì)
在固液捆綁火箭總體構(gòu)型中,運(yùn)載火箭芯一級(jí)采用我國新一代液氧煤油發(fā)動(dòng)機(jī),助推器采用大推力固體發(fā)動(dòng)機(jī)。對(duì)于液體發(fā)動(dòng)機(jī),若發(fā)動(dòng)機(jī)起動(dòng)失敗或性能不滿足要求,只要火箭不離開發(fā)射臺(tái),均可對(duì)液體發(fā)動(dòng)機(jī)實(shí)施緊急關(guān)機(jī),以保證箭體、衛(wèi)星載荷及發(fā)射設(shè)施的安全。但是固體發(fā)動(dòng)機(jī)一旦點(diǎn)火則不可逆,無法在發(fā)射臺(tái)上實(shí)施緊急關(guān)機(jī)。
根據(jù)固液發(fā)動(dòng)機(jī)推力建立時(shí)間的不同,在固液捆綁火箭總體設(shè)計(jì)時(shí)采用芯級(jí)發(fā)動(dòng)機(jī)先點(diǎn)火、固體發(fā)動(dòng)機(jī)后點(diǎn)火的方案。參考國外運(yùn)載火箭牽制釋放的原理,在固體發(fā)動(dòng)機(jī)點(diǎn)火前對(duì)芯級(jí)發(fā)動(dòng)機(jī)進(jìn)入額定工況后進(jìn)行健康診斷,判斷發(fā)動(dòng)機(jī)工作狀態(tài),若工作正常則實(shí)施固體發(fā)動(dòng)機(jī)點(diǎn)火,火箭起飛,否則緊急關(guān)閉芯一級(jí)發(fā)動(dòng)機(jī),中止發(fā)射。這種點(diǎn)火時(shí)序設(shè)計(jì)方案充分發(fā)揮固液捆綁火箭綜合優(yōu)勢(shì),極大地提高固液捆綁火箭的點(diǎn)火安全性,保證了箭體、衛(wèi)星載荷及發(fā)射場地面設(shè)施的安全。
1.2 發(fā)動(dòng)機(jī)健康診斷系統(tǒng)組成
液體發(fā)動(dòng)機(jī)健康診斷系統(tǒng)主要由健康診斷控制器、綜合控制器、芯一級(jí)發(fā)動(dòng)機(jī)傳感器及變換器組成,如圖1 所示。芯一級(jí)發(fā)動(dòng)機(jī)傳感器及變換器上電后全程采集發(fā)動(dòng)機(jī)參數(shù),并將參數(shù)傳輸至箭上健康診斷控制器。健康診斷控制器以點(diǎn)火指令時(shí)刻為基準(zhǔn),在發(fā)動(dòng)機(jī)健康診斷區(qū)間內(nèi),判定芯級(jí)發(fā)動(dòng)機(jī)是否工作正常,若異常則向地面測發(fā)控系統(tǒng)及箭上綜合控制器發(fā)出緊急關(guān)機(jī)信號(hào)。綜合控制器以點(diǎn)火指令時(shí)刻為基準(zhǔn),執(zhí)行芯級(jí)發(fā)動(dòng)機(jī)點(diǎn)火程序,當(dāng)接收到緊急關(guān)機(jī)指令時(shí),執(zhí)行芯級(jí)發(fā)動(dòng)機(jī)緊急關(guān)機(jī)程序,同時(shí)停發(fā)固體發(fā)動(dòng)機(jī)點(diǎn)火指令。

圖1 發(fā)動(dòng)機(jī)健康診斷系統(tǒng)組成Fig.1 Structure of the engine health diagnosis system
1.3 健康診斷算法
1.3.1 診斷參數(shù)
液氧煤油發(fā)動(dòng)機(jī)系統(tǒng)一般由火藥啟動(dòng)器、電爆管、渦輪泵、推力室、燃?xì)獍l(fā)生器、蒸發(fā)器、活門、機(jī)架、導(dǎo)管及控制組件等組成。發(fā)動(dòng)機(jī)起動(dòng)過程中的故障大部分是由火藥啟動(dòng)器、電爆管和活門引起,在穩(wěn)態(tài)工作段多易發(fā)生泄漏、渦輪泵故障等問題,在關(guān)機(jī)過程中則易出現(xiàn)活門關(guān)閉不嚴(yán)、不動(dòng)作等問題,造成的后果有性能下降、部件損壞甚至發(fā)動(dòng)機(jī)爆炸。液體發(fā)動(dòng)機(jī)故障模式見表1。

表1 液體發(fā)動(dòng)機(jī)故障模式Tab.1 Malfunction modes of liquid engine
每一種故障對(duì)應(yīng)一定的故障特征參數(shù),故障發(fā)生時(shí)故障信息就會(huì)通過特征參數(shù)表現(xiàn)出來。根據(jù)液體發(fā)動(dòng)機(jī)的主要故障模式,其主要特征參數(shù)包括轉(zhuǎn)速參數(shù)和壓力參數(shù)。各健康診斷參數(shù)表征發(fā)動(dòng)機(jī)狀態(tài)情況見表2。

表2 發(fā)動(dòng)機(jī)健康診斷參數(shù)Tab.2 Parameters of engine health diagnosis
1.3.2 診斷時(shí)間
芯一級(jí)發(fā)動(dòng)機(jī)起動(dòng)完成后火箭仍停留在發(fā)射臺(tái),在此期間內(nèi)健康診斷系統(tǒng)采集發(fā)動(dòng)機(jī)參數(shù)信息,根據(jù)診斷算法,自動(dòng)得出發(fā)動(dòng)機(jī)是否正常起動(dòng)的結(jié)論。
液體發(fā)動(dòng)機(jī)點(diǎn)火后停留時(shí)間越長,越有利于提高診斷結(jié)果的可靠性。但停留時(shí)間過長,一方面增加了發(fā)動(dòng)機(jī)的工作時(shí)間,對(duì)提高診斷可靠性的作用有限;另一方面造成已加注推進(jìn)劑的浪費(fèi),影響火箭運(yùn)載能力。因此,綜上所述需選取合理的停留時(shí)間。
根據(jù)芯級(jí)發(fā)動(dòng)機(jī)起動(dòng)特性,發(fā)動(dòng)機(jī)起動(dòng)時(shí)由于渦輪泵轉(zhuǎn)速等主要參數(shù)變化劇烈,難以準(zhǔn)確檢測、判斷其參數(shù)狀態(tài)是否異常,因此此時(shí)不進(jìn)行健康診斷,防止誤關(guān)機(jī)。根據(jù)歷次發(fā)動(dòng)機(jī)試車(含極限邊界試車)及其飛行數(shù)據(jù)統(tǒng)計(jì),發(fā)動(dòng)機(jī)在起動(dòng)后2.40 s內(nèi)完成起動(dòng)過程進(jìn)入額定工況。各診斷參數(shù)進(jìn)入額定工況的時(shí)間見表3。

表3 各參數(shù)進(jìn)入額定工況的時(shí)間統(tǒng)計(jì)Tab.3 Time statistics of each parameter entering the specified working condition
為提高診斷結(jié)果可靠性,同時(shí)避免推進(jìn)劑浪費(fèi),在芯級(jí)發(fā)動(dòng)機(jī)起動(dòng)2.50 s 后發(fā)動(dòng)機(jī)參數(shù)波動(dòng)變緩,發(fā)動(dòng)機(jī)進(jìn)入穩(wěn)態(tài)工作階段,此時(shí)健康診斷系統(tǒng)介入,采集發(fā)動(dòng)機(jī)關(guān)鍵特性參數(shù),對(duì)發(fā)動(dòng)機(jī)工作情況進(jìn)行分析判斷,健康診斷結(jié)束時(shí)間為發(fā)動(dòng)機(jī)起動(dòng)2.80 s 后,診斷時(shí)長0.30 s,如圖2 所示。在芯級(jí)發(fā)動(dòng)機(jī)工作正常情況下,固體發(fā)動(dòng)機(jī)在液體發(fā)動(dòng)機(jī)起動(dòng)3.00 s 后實(shí)施點(diǎn)火,火箭起飛。

圖2 發(fā)動(dòng)機(jī)健康診斷診斷時(shí)間要求Fig.2 Time requirement of engine health diagnosis
1.3.3 診斷算法
發(fā)動(dòng)機(jī)健康診斷系統(tǒng)要求在較短的時(shí)間內(nèi)判別出發(fā)動(dòng)機(jī)工作狀態(tài),因此選擇算法簡單、運(yùn)算量小的紅線檢測算法。發(fā)動(dòng)機(jī)傳感器的安全帶設(shè)置是紅線算法的核心和難點(diǎn),安全帶過窄可能造成誤關(guān)機(jī),過寬則敏感度不足,不能及時(shí)檢測到故障。為了在避免誤關(guān)機(jī)的情況下盡早發(fā)現(xiàn)故障,健康診斷算法在設(shè)計(jì)時(shí)采用“中心值+上下偏差”給定參數(shù)安全帶。安全帶中心值采用發(fā)動(dòng)機(jī)工藝驗(yàn)收試車時(shí)的均值,上下偏差則根據(jù)不同入口壓力和溫度、測量誤差、信號(hào)噪聲等干擾因素設(shè)定,且為避免誤關(guān)機(jī)留有一定的安全余量。
為提高診斷可靠性,在紅線檢測方法中,選定的檢測參數(shù)有3 種狀態(tài):正常、異常和剔除。正常狀態(tài)是指參數(shù)在安全帶內(nèi);異常是指參數(shù)超出安全帶,但在傳感器量程范圍內(nèi);剔除是指參數(shù)超出量程范圍。發(fā)動(dòng)機(jī)健康診斷算法設(shè)計(jì)原則為既要保證發(fā)動(dòng)機(jī)的故障能有效診斷出來,同時(shí)又不能因誤診斷而導(dǎo)致發(fā)動(dòng)機(jī)誤緊關(guān)。故在進(jìn)行健康診斷算法設(shè)計(jì)時(shí),采用多參數(shù)聯(lián)合診斷算法,確保診斷算法的可靠性,如圖3 所示。主要診斷邏輯如下:①各路診斷參數(shù)首先進(jìn)行剔除判別,若參數(shù)超過傳感器量程則進(jìn)行剔除;②若參數(shù)在量程范圍內(nèi),則進(jìn)行參數(shù)安全帶判別,若參數(shù)連續(xù)3 次超過要求的安全帶,則認(rèn)為該參數(shù)異常;③若有3 個(gè)及以上的參數(shù)同時(shí)異常,則認(rèn)為發(fā)動(dòng)機(jī)異常。

圖3 發(fā)動(dòng)機(jī)健康診斷算法邏輯Fig.3 Logic diagram of the engine health diagnosis algorithm
1.4 健康診斷控制器冗余設(shè)計(jì)
為提高健康診斷系統(tǒng)可靠性,箭上進(jìn)行發(fā)動(dòng)機(jī)參數(shù)診斷的控制器采用三冗余設(shè)計(jì)。控制器內(nèi)的3 個(gè)主控采樣模塊運(yùn)行功能相同的軟件,接收來自地面設(shè)備發(fā)出的點(diǎn)火信號(hào),獨(dú)自進(jìn)行數(shù)據(jù)采樣及參數(shù)診斷,完成發(fā)動(dòng)機(jī)關(guān)鍵狀態(tài)參數(shù)采集及診斷功能,最后通過硬件進(jìn)行3 取2 處理,結(jié)果分別輸出至綜合控制器和地面測發(fā)控系統(tǒng)。健康診斷控制器功能架構(gòu)如圖4 所示,硬件架構(gòu)如圖5 所示。

圖4 健康診斷控制器功能架構(gòu)Fig.4 Functions of the health diagnosis controller

圖5 健康診斷控制器硬件架構(gòu)Fig.5 Hardware architecture of the health diagnosis controller
電源模塊包含電源子模塊1、電源子模塊2 和電源子模塊3,這3個(gè)子模塊相互獨(dú)立,結(jié)構(gòu)完全一致,主要由濾波器和DC/DC 模塊組成。每個(gè)電源子模塊均產(chǎn)生2 檔電源:±15、±5 V,其中±15 V 為運(yùn)算放大器和AD 采樣電路提供電源,±5 V 為其余控制電路供電。為外部發(fā)動(dòng)機(jī)供電的±15 V 由電源子模塊1 和電源子模塊2 并聯(lián)冗余供電,即使一路±15 V 失效,另一路仍能給發(fā)動(dòng)機(jī)供電,以保證供電可靠性。
主控采樣模塊是健康診斷控制器的核心,由3 個(gè)采樣子模塊組成,形成三模冗余,3 個(gè)子模塊完全一致。主控采樣模塊主要負(fù)責(zé)發(fā)動(dòng)機(jī)各參數(shù)的采集與處理、地面設(shè)備點(diǎn)火指令的接收、向綜合控制器發(fā)送緊急關(guān)機(jī)指令等。每個(gè)采樣子模塊接收到接口模塊發(fā)來的以3 取2 表決后的點(diǎn)火指令為時(shí)間基準(zhǔn),在診斷區(qū)間內(nèi)對(duì)發(fā)動(dòng)機(jī)和傳感器的各參數(shù)進(jìn)行采集、處理,判斷發(fā)動(dòng)機(jī)和傳感器是否正常工作,若出現(xiàn)異常,則向接口模塊發(fā)出緊急關(guān)機(jī)指令。接口模塊是健康診斷控制器和地面設(shè)備、綜合控制器之間的信號(hào)傳遞模塊,主要是接收地面設(shè)備的點(diǎn)火指令、發(fā)送緊急關(guān)機(jī)指令。接口模塊通過三路獨(dú)立的光耦接收點(diǎn)火信號(hào)。接口模塊內(nèi)設(shè)有由3 個(gè)固態(tài)繼電器組成的3 取2 表決電路,將3 個(gè)主控采樣模塊各自輸出的緊急關(guān)機(jī)信號(hào)通過硬件表決,輸出最終的緊急關(guān)機(jī)信號(hào)。
2 試驗(yàn)驗(yàn)證情況
為考核發(fā)動(dòng)機(jī)健康診斷系統(tǒng)方案及單機(jī)設(shè)計(jì)的正確性,箭上健康診斷系統(tǒng)參與發(fā)動(dòng)機(jī)地面試車試驗(yàn)考核。地面試車考核按2 種發(fā)動(dòng)機(jī)工況進(jìn)行開展:發(fā)動(dòng)機(jī)降工況試車和發(fā)動(dòng)機(jī)正常試車。前者模擬發(fā)動(dòng)機(jī)工況下降工況,檢查箭上健康診斷系統(tǒng)對(duì)發(fā)動(dòng)機(jī)故障診斷并實(shí)施緊急關(guān)機(jī)工作情況;后者模擬發(fā)動(dòng)機(jī)正常工況,檢查箭上健康診斷系統(tǒng)正常工作情況。地面試車時(shí),發(fā)動(dòng)機(jī)健康診斷區(qū)間設(shè)置為試車全程診斷。
2.1 發(fā)動(dòng)機(jī)降工況試車
試車時(shí)間510 s,前400 s 為額定工況,400~450 s進(jìn)行高工況考核,490 s 開始降工況關(guān)機(jī),發(fā)動(dòng)機(jī)試車工況變化如圖6 所示。發(fā)動(dòng)機(jī)降工況后,健康診斷參數(shù)超出安全帶范圍,健康診斷控制器發(fā)出緊急關(guān)機(jī)信號(hào),考核了箭上健康診斷系統(tǒng)對(duì)發(fā)動(dòng)機(jī)故障情況的適應(yīng)性。參數(shù)曲線如圖7 所示。

圖6 發(fā)動(dòng)機(jī)試車工況變化情況Fig.6 Schematic diagram of the engine test condition change

圖7 變工況下的健康診斷參數(shù)曲線Fig.7 Curves of the health diagnosis parameters under the variable test condition

續(xù)圖7 變工況下的健康診斷參數(shù)曲線ContinuousFig.7 Curves of the health diagnosis parameters under the variable test condition
2.2 發(fā)動(dòng)機(jī)正常試車
試車過程中轉(zhuǎn)速參數(shù)、壓力參數(shù)1、壓力參數(shù)2、壓力參數(shù)3 曲線如圖8 所示。進(jìn)入診斷區(qū)間后,所有診斷參數(shù)均在安全帶范圍內(nèi),未發(fā)生漏緊關(guān)、誤緊關(guān)現(xiàn)象。通過發(fā)動(dòng)機(jī)試車試驗(yàn),驗(yàn)證了系統(tǒng)間接口協(xié)調(diào)匹配性及發(fā)動(dòng)機(jī)健康診斷策略設(shè)計(jì)、軟件實(shí)現(xiàn)的正確性和有效性。
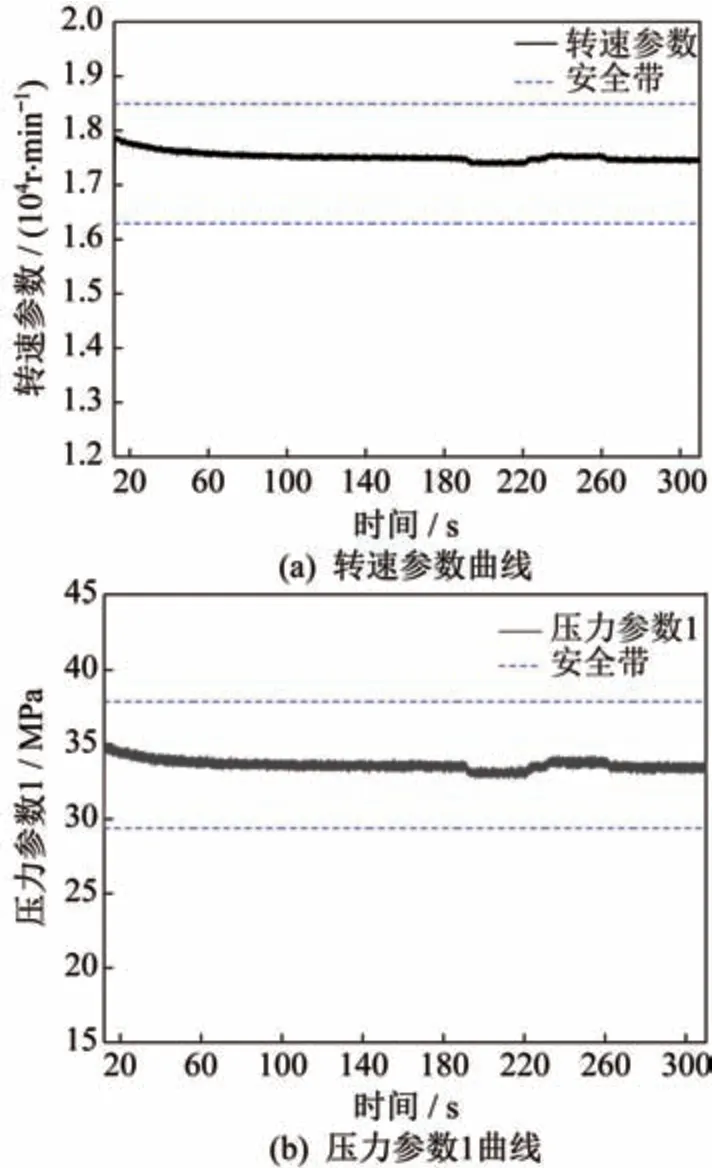
圖8 正常工況下的健康診斷參數(shù)曲線Fig.8 Curves of the health diagnosis parameters under the normal test condition

續(xù)圖8 正常工況下的健康診斷參數(shù)曲線ContinuousFig.8 Curves of the health diagnosis parameters under the normal test condition
2022 年3 月29 日,首次采用的發(fā)動(dòng)機(jī)健康診斷系統(tǒng)圓滿完成了新一代固液捆綁運(yùn)載火箭CZ-6A 首飛任務(wù),進(jìn)一步驗(yàn)證了發(fā)動(dòng)機(jī)健康診斷技術(shù)設(shè)計(jì)方案的正確性。經(jīng)對(duì)遙測數(shù)據(jù)分析,在診斷區(qū)間內(nèi),健康診斷控制器3 塊CPU 采集的數(shù)據(jù)一致性較好。各參數(shù)均在安全帶內(nèi),未發(fā)出緊急關(guān)機(jī)信號(hào)。
3 結(jié)束語
本文對(duì)固液捆綁火箭中固體發(fā)動(dòng)機(jī)點(diǎn)火后不可逆的特點(diǎn),首次采用了一種箭上發(fā)動(dòng)機(jī)健康診斷系統(tǒng)。經(jīng)飛行試驗(yàn)驗(yàn)證表明,發(fā)動(dòng)機(jī)健康診斷系統(tǒng)方案合理可行,大幅提高了固液捆綁火箭的點(diǎn)火安全性。該方案可以作為其他運(yùn)載火箭或航天器發(fā)動(dòng)機(jī)健康診斷系統(tǒng)設(shè)計(jì)的參考。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
