某型飛行器氣動參數辨識與彈道仿真
2022-12-03 16:38:22梁明
上海航天 2022年5期
關鍵詞:模型
梁明
(中國人民解放軍91851 部隊,遼寧 葫蘆島 125001)
0 引言
隨著計算機技術的不斷發展,模型辨識方法與計算機技術相結合,使得模型辨識精度越來越高,在航天飛行器領域的應用越來越廣泛[1]。本文建立了某型飛行器動力學模型結構,對氣動力辨識輸入參數進行了分析;采用迭代算法得出辨識參數,并對辨識精度進行了分析,認為主要是觀測量測量誤差、物理幾何參數誤差影響辨識精度。模型辨識的難點在于參數精度的分析和確認,本文在初步分析影響精度主要因素的基礎上,將辨識得到的氣動參數帶入彈道仿真程序進行仿真驗證。
1 建立某型飛行器動力學模型
1.1 理論分析
在建立模型過程中,將某型飛行器視為運動剛體,其在空間的運動可以分解為3 個線位移和3 個角位移,用6 自由度來進行描述,采取輸入激勵信號激發某型飛行器運動模態,從而辨識出該型飛行器的相關氣動參數[2]。
某型飛行器助推器工作時間比總飛行時間要短的多,一般只有3~4 s,但助推器的推力很大,通常助推器推力產生的縱向過載可達15~18g,在助推器推力持續作用時,空氣動力的影響幾乎可以忽略,且助推段很難獲得滿足參數辨識要求的響應參數[3],因此本研究中不考慮助推器的推力。在上述條件下,某型飛行器6 自由度動力學數學模型為[4]

式中:Wxd、Wzd為風速在地面座標系的分量,Wxd=WcosψW,Wzd=-WsinψW,ψW為風向角。
氣動系數的模型應根據某型飛行器氣動外形的特點來確定[5],一般情況下可表示為
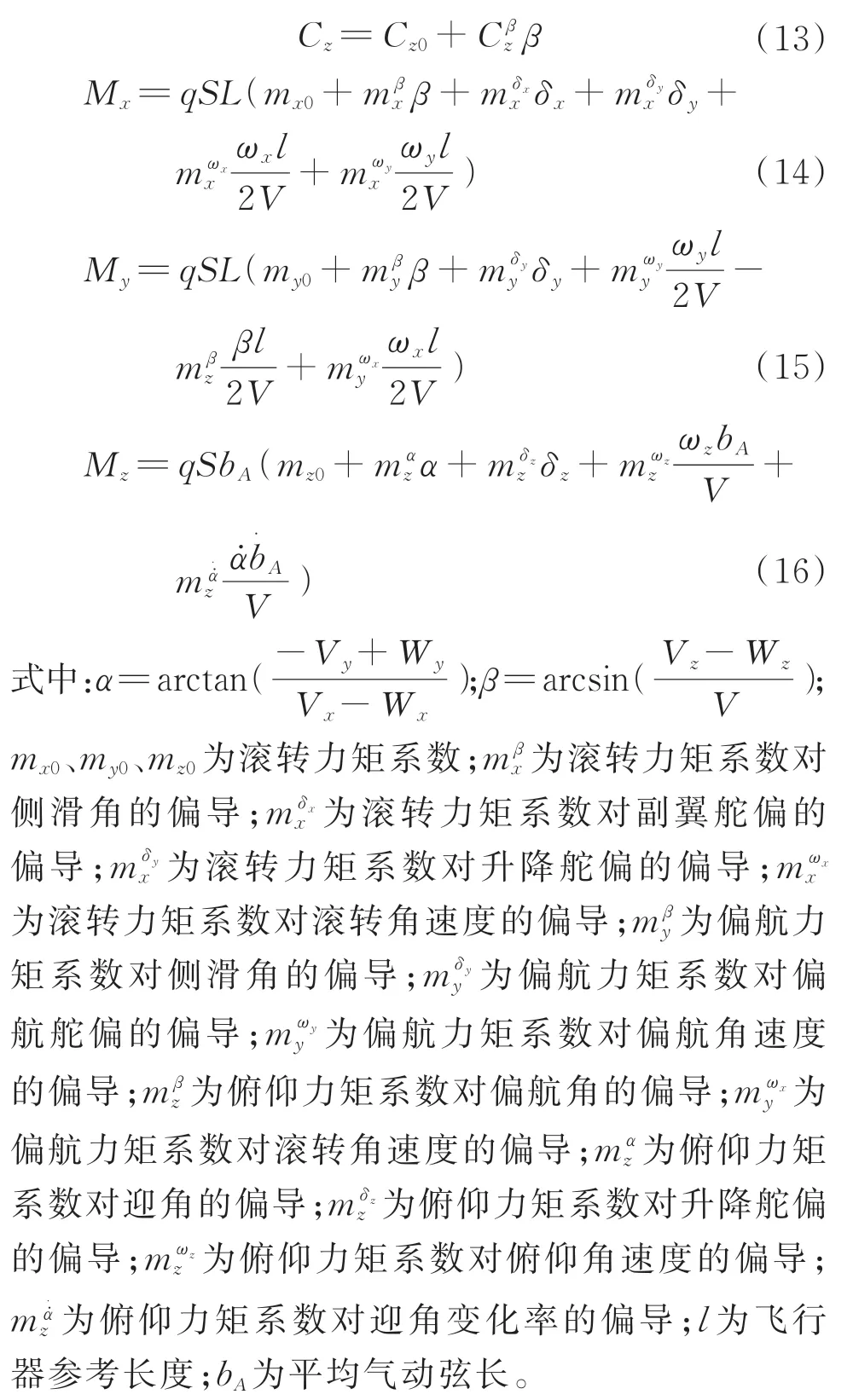
以上方程再加上控制方程就成為一個完整的方程組。某型飛行器的調節規律方程通常可表示為[6]
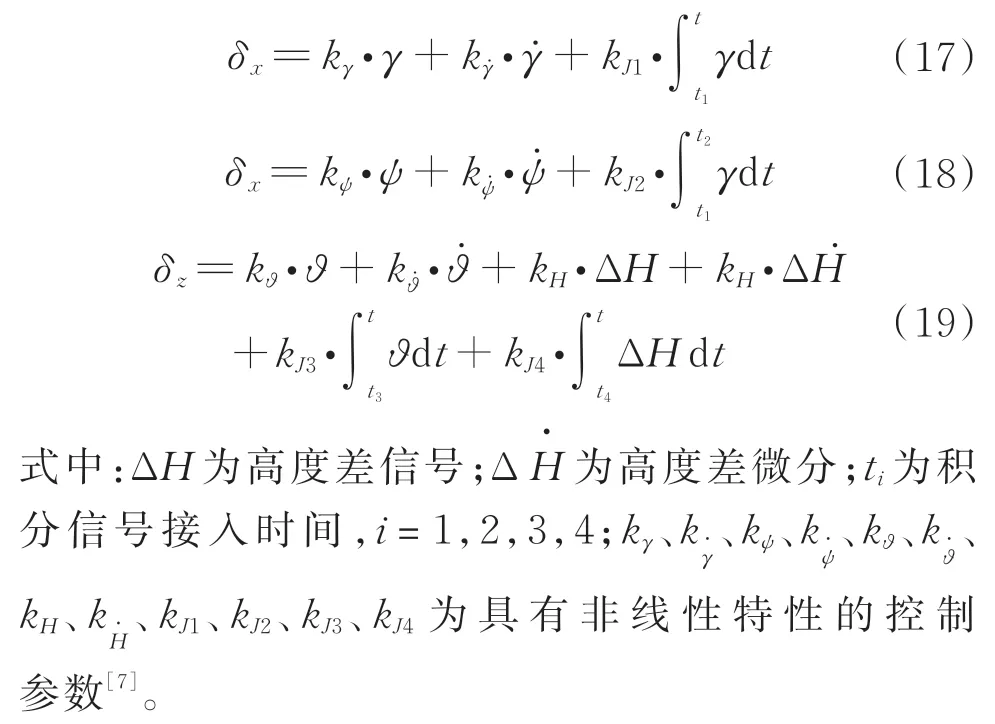
從調節規律的方程還可以看出,某型飛行器3 個通道的控制是互相獨立的,正常飛行情況下,可以將6 自由度動力學數學模型,簡化為縱向和側向2 個3 自由度的動力學模型[8]。
1.2 辨識輸入數據
1)導彈的結構參數:導彈質量m,轉動慣量Jx、Jy、Jz,導彈質心XT、YT,參考面積S,平均氣動弦長bA,參考長度l,傳感器的安裝位置等;
2)外彈道測量參數:導彈速度V、飛行高度h等;
3)氣象測量參數:密度ρ(若密度無實測值可根據飛行高度計算)、風速W、風向角ψW等;
4)內彈道測量參數:舵偏角δx、δx、δx,導彈姿態角ψ、?、γ,導彈轉動角速度ωx、ωy、ωz,導彈軸向、法向、側向過載Nx、Ny、Nz,發動機推力R,導彈攻角α,側滑角β等。
2 迭代算法
采用牛頓-拉夫遜迭代公式[9]

式中的d修正量Δθk可由下列線性代數方程組計算[10]:
具體迭代過程為根據某型飛行器理論計算結果,給出待估氣動參數的初值θ0,由狀態方程、觀測方程和靈敏度方程積分出某型飛行器的狀態值x、觀測值y和靈敏度陣;然后,解線性代數方程組求出Δθ0,再以θ1=θ0+Δθ0代替原來的θ0,重復以上計算過程,每迭代一次都需要計算似然準則函數Jk和Jk/Jk-1[11]。當時,則認為迭代收斂,此時的待估參數θk,即為所求的氣動參數,一般情況下取ε=0.01[12]。
3 辨識精度分析
影響氣動參數辨識精度的因素較多,歸納起來有以下幾個方面:
1)觀測量的測量誤差。觀測量的測量誤差是影響辨識精度的重要因素[13]。利用飛行試驗數據進行參數辨識時,觀測量一般取導彈轉動角速度ωx、ωy、ωz,姿態角ψ、?、γ,導彈軸向、法向、側向過載Nx、Ny、Nz,導彈攻角α,側滑角β。分別由安裝在彈體內部的角速率傳感器、角位移傳感器、過載傳感器、攻角傳感器及側滑角傳感器獲得。通過遙測傳感器獲得時,零位漂移、死區、安裝誤差不可避免,但選擇高精度的傳感器可以使誤差減小,為滿足氣動參數辨識的需要,遙測傳感器應滿足如下要求:
(1)噪聲強度系數不高于1%;
(2)角位移傳感器的零位漂移速度應小于每分鐘0.1°,角速率傳感器的零位漂移小于峰值的0.2%,過載傳感器零位漂移應小于峰值的1.0%;
(3)傳感器的標定誤差應小于0.3%;
(4)閉環飛行試驗中,角速率、角位移、過載傳感器的死區分別應在0.03(°/s,(°),g)的范圍內;
(5)角速率傳感器安裝角的偏移度要小于0.1°,過載傳感器安裝角的偏移度要小于0.2°,過載傳感器質心位置及安裝位置誤差要小于3.0 mm。
2)幾何和物理參數的誤差。幾何參數包括特征長度、面積,物理參數包括慣性力矩、動壓、質量,這些量中任何一個量值存在的誤差,都會對氣動參數估值產生相同的誤差[14]。
4 參數辨識應用
4.1 可辨識性分析

若右端某一項遠小于左端,則該項是不可辨識的;若左端接近于零,則該項也是不可辨識的,其余類同。
數據取自該型飛行器6 自由度85~86 s 的內、外彈道數據,數據包括:光測數據t、V、h、θ、ψc,遙測采樣數據ωx、ωy、ωz、Nx、Ny、Nz、δx、δy、δz、α、β,彈體結構參數l、bA、S、m、Jx、Jy、Jz,氣象數據ρ、W、ψW等。
為了分析這段數據的可辨識性,將動力學方程的各項分別逐項計算,結果見表1—表3。可以看出與各項的數量級相當,這表明縱、側向氣動系數均可進行辨識,可以采用6 自由度參數辨識的基本方程組進行辨識,表中數據還表明阻尼參數的數量級較小,會有較大的辨識誤差[16]。
表1 辨識數據x表Tab.1 x table of identification data

表1 辨識數據x表Tab.1 x table of identification data
表2 辨識數據y表Tab.2 y table of identification data
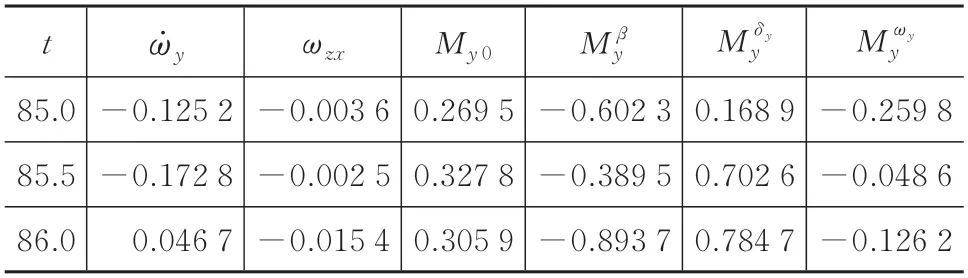
表2 辨識數據y表Tab.2 y table of identification data
表3 辨識數據z表Tab.3 z table of identification data
表3 辨識數據z表Tab.3 z table of identification data
4.2 辨識結果
采用極大似然法,對仿真數據采取參數辨識的基本方法進行辨識[17]。
狀態變量為
觀測量為

待估參數為

共辨識出21個氣動系數,辨識結果見表4~表7。

表4 辨識結果(1~5)Tab.4 Identification results(1~5)

表6 辨識結果(11~16)Tab.6 Identification results(11~16)

表7 辨識結果(17~21)Tab.7 Identification results(17~21)
辨識得到的氣動參數為計算飛行器彈道導彈飛行力學所需要的升力、阻力、側向力,俯仰、滾轉、偏航力矩系數及其對迎角、側滑角、舵偏角的偏導。辨識得到這些氣動參數之后,便可以對導彈的彈道進行仿真分析[18]。
5 辨識模型的彈道仿真
通過對該型飛行器控制系統和動力系統進行辨識,得出了部分模型辨識參數,下面驗證這些實辨參數模型。
根據理論模型編寫彈道仿真程序,可有效地計算該型號飛行器的控制彈道,并經過多次實彈飛行試驗驗證。驗證結果表明,該理論模型精度較高,滿足要求。
將實辨模型代入該型飛行器彈道仿真程序,替換原來的理論模型,進行彈道仿真計算。從仿真結果看,彈道變化平穩,與試驗數據吻合較好,誤差符合規定的范圍,通過本方法得到的氣動力參數精度已滿足工程實際需要,實際辨識模型參數具有可信性[19]。Y方向仿真彈道如圖1 所示,該彈道反映了某型飛行器初始正常爬高,按照預定程序下滑、穩定平飛、91 s 開始規避爬升、躍過目標艦后下滑入水自毀。
圖1 Y 方向仿真彈道Fig.1 Simulation ballistics in the Y-direction
等效飛行高度曲線如圖2 所示,該曲線反映了某型飛行器高度通道輸出變化規律,從0~90 s 高度通道正常輸出高度表測量高度,90 s 以后輸出固定高度電平,從而完成安控規避。X方向仿真彈道曲線如圖3 所示,該曲線反映了該型號飛行器縱向位移平穩。

圖2 等效飛行高度仿真Fig.2 Equivalent flight altitude simulation
圖3 X 方向仿真彈道Fig.3 Simulation ballistics in the X-direction
1~4 舵機仿真曲線分別如圖4~圖7 所示,4 條仿真曲線反映了某型飛行器舵機系統的變化規律,這4 個舵機系統動作對稱性好,響應速度快,滿足該型飛行器控制要求[20]。
圖4 1 舵機仿真曲線Fig.4 Simulation curve of Servo 1
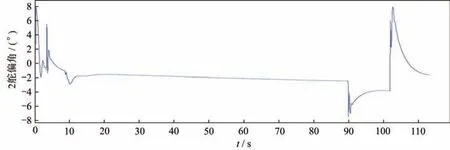
圖5 2 舵機仿真曲線Fig.5 Simulation curve of Servo 2
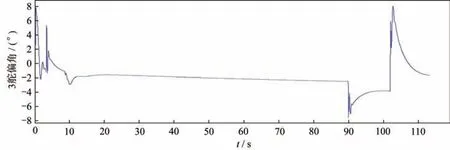
圖6 3 舵機仿真曲線Fig.6 Simulation curve of Servo 3
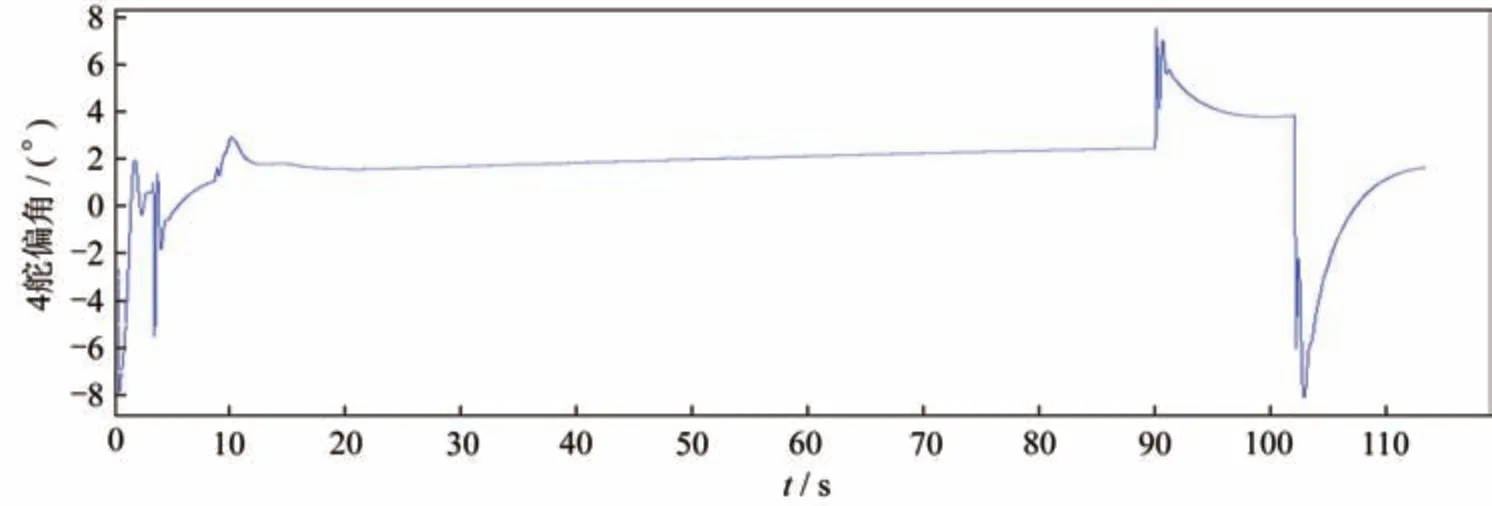
圖7 4 舵機仿真曲線Fig.7 Simulation curve of Servo 4
6 結束語
本文介紹了一種飛行器氣動模型參數辨識方法,利用該方法進行了飛行器的典型氣動參數辨識,并將辨識得到的氣動數據代入彈道仿真程序中進行驗證。驗證結果表明,該氣動參數得到的彈道與實際情況吻合程度高,辨識精度較好。同時作為一種工程方法,該氣動參數辨識方法使用較為方便,計算耗時較少,適合于多種工程場景,在工程領域有廣泛的應用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
